автоматизированное проектирование устройств и компонентов
advertisement

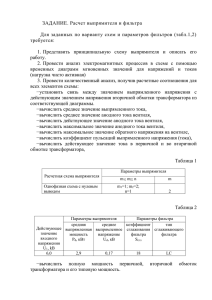
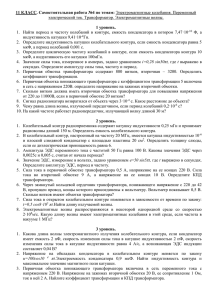
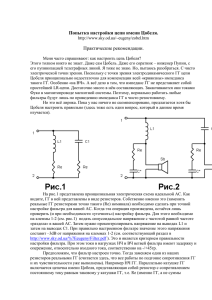
АВТОМАТИЗИРОВАННОЕ ПРОЕКТИРОВАНИЕ УСТРОЙСТВ И КОМПОНЕНТОВ СИЛОВОЙ ЭЛЕКТРОНИКИ ПРОЕКТИРОВАНИЕ УСТРОЙСТВ СИЛОВОЙ ЭЛЕКТРОНИКИ В общем случае задача проектирования силовых электронных устройств осложняется тем, что требуется рациональное распределение массы и мощности потерь между элементами схемы. Наибольший эффект достигается, если разработка ведется на системном уровне с учетом характеристик первичных источников электроэнергии и параметров потребителей и применением оригинальных для каждого класса ЭУ алгоритмов и программ их расчета. • Решение проблемы рационального распределения массы и мощности потерь между элементами облегчается, если принять допущение о независимости режима любого элемента ЭУ от изменения соотношения масса – потери мощности других элементов. • Тогда методика проектирования ЭУ может быть определена как методика поузлового проектирования по условию M min mi min , • с интервалом неопределенности (отклонение от оптимального значения) . 2 1 3 • Видно, что при 0.9, δ < 7, что вполне приемлемо. • Интервал неопределенности можно значительно уменьшить, если учитывать присоединенную массу первичного источника при проектировании по критерию • mi Pi min , • где – КПД ЭУ, mi , Pi – масса и потери мощности в i-том элементе, – удельный показатель первичного источника (кг/вт). • При поузловом проектировании количество переменных ограничено, а направление и границы их варьирования определяются особенностями физических процессов в схеме, что существенно упрощает задачу, и позволяет использовать имеющиеся методики расчета схем ЭУ, на основе которых, после дополнения их блоками оптимизации, и строятся программы проектирования. • Эти программы являются оригинальными для каждого устройства. • При разбиении ЭУ на отдельные блоки используется метод диакоптики: • - исходная схема разбивается на подсхемы (блоки); • - в местах соединения блоков вводятся эквивалентные источники, учитывающие их взаимодействие (рис. 3.1). • При этом результаты расчета каждого блока содержат две группы параметров: -потребляемый от предыдущего блока ток и требуемое напряжение на его выходе, -выходное напряжение и ток нагрузки данного блока. Рис. 3.1. Схема разделения ЭУ на блоки Zk Zi Iн 1 2 Zн + Е I нK U1,0 K K - • В соответствии с общей стратегией проектирования можно выделить следующие основные этапы проектировании устройств силовой электроники: • 1. Формирование массива исходных данных. • 2. Формирование массива альтернативных структур. • 3. Определение критерия проектирования, независимых переменных и ограничений. • 4. Определение алгоритма варьирования независимых переменных для достижения экстремума заданного критерия. • 5. Сравнительный анализ структур по результатам их проектирования. • Основными исходными данными для проектирования ЭУ являются: • • мощность нагрузки и диапазон её изменения; • • выходное напряжение или ток, и показатели их качества; • • возмущающие воздействия по цепи нагрузки, питания и управления; • • условия эксплуатации; • • технические характеристики и мощность первичного источника. Обобщённый алгоритм проектирования (расчета) ЭУ Начало Ввод исходных данных Анализ результатов ; корректировка данных и параметров Расчёт ЭУ ; формирование ТЗ на проектирование компонентов Модели ЭУ ( программы расчёта ) Проектирование компонентов ; расчёт М , Модели компонентов Синтез структуры и параметров СУ Функциональная модель ЭУ Анализ установившихся и переходных процессов Схемотехническая модель ЭУ Конец • Расчетом схемы определяются начальные значения параметров ее элементов и их электрические режимы. • Эти данные являются техническим заданием на проектирование (выбор) элементов. • После проектирования элементов схемы определяется масса и потери мощности в устройстве в целом. • Затем производится синтез структуры и параметров схемы управления (СУ) и испытания ЭУ на модели. • Итерационный характер процесса отражен блоком “анализ результатов, корректировка данных и параметров”. • В процессе проектирования для выбранной структуры ЭУ необходимо определить параметры элементов и варианты их конструкторского исполнения, обеспечивающие достижение заданного критерия и соответствие требованиям ТЗ. • Проектирование компонентов основано на использовании модульных программ проектирования основных элементов схемы (трансформаторы, дроссели, конденсаторы, силовые полупроводниковые элементы). Эти программы (модели) являются инвариантными по отношению к схемам устройств силовой электроники. • Синтез структуры и параметров СУ основан на допущении о том, что удается выбрать СУ без необходимости изменения параметров силовой части. На этом этапе используется функциональная (упрощённая) модель ЭУ. • На этапе анализа проверяется соответствие разработанной схемы требованиям ТЗ (её функциональному назначению), соответствие режимов работы элементов требованиям ТУ на них с заполнение карты рабочих режимов, соответствие полученных режимов расчётным, статистический контроль и граничные испытания. • 3.2. АЛГОРИТМ ПРОЕКТИРОВАНИЯ ВЫПРЯМИТЕЛЯ • Формальных (математических) методов синтеза структур вентильных преобразователей по требованиям технического задания в силовой электронике пока нет, хотя исследования в том направлении проводятся. • Поэтому эвристический по сути этап выбора схемы выпрямителя основан на знании видов и свойств базовых схем выпрямления, а процедура синтеза схемы выпрямителя сводится к выбору ее из множества известных, на основании знания их свойств. • Расчетный этап по определению параметров элементов схемы основывается на известных теоретических соотношениях. • Результаты расчета проверяются математическим моделированием схемы спроектированного выпрямителя. • Выбор схемы выпрямителя (этап структурного синтеза) • Процедуру принятия решения можно формализовать, создав в виде программы для ЭВМ соответствующую экспертную систему, основанную на базе знаний по силовой электронике. • В тех случаях, когда не удается выбрать подходящую схему выпрямителя из числа известных, потребуется или изобретение новой схемы, или корректировка задания на проектирование выпрямителя. • По результатам анализа базовых схем выпрямителей однофазного и трехфазного тока составлена сводная таблица базовых схем и их свойств (табл. 3.1). Параметры базовых схем выпрямителей (база знаний) • • • • • • • • m – число фаз; q – число полупериодов; mq – пульсность; кП – коэффициент пульсаций; ka – коэффициент амплитуды анодного тока; kф – коэффициент формы анодного тока; – коэффициент мощности выпрямителя; S1,2,T – установленная (типовая) мощность 1-й, 2-й обмоток, трансформатора; • КТ – коэффициент трансформации трансформатора; • I1, U1 – фазный ток и напряжение сети; • Ub max – обратное максимальное напряжение на вентилях. Таблица 3.1 • Интеллектуальный алгоритм выбора схемы выпрямителя исходя из трех заданных параметров: Pd 0 , U d 0 , I d , с учетом использования типовой мощности трансформатора и использования вентилей по обратному напряжению с коэффициентом запаса 1,5…2 приведен на рис. 3.2. • Интеллектуальный алгоритм формируется на основании приведенной базы знаний и типовых рекомендаций по выбору схем выпрямителей и, несмотря на некоторые упрощения, иллюстрирует образец подхода Рис. 3.2. Интеллектуальный алгоритм выбора схемы выпрямителя • Пусть необходимо спроектировать выпрямитель для обеспечения пуска и длительной работы двигателя постоянного тока при номинальной скорости вращения с постоянным потоком возбуждения. • Параметры двигателя: Pн=100кВт, Uя.ном=440В, nн=1000об/мин. Допустимые пульсации тока якоря не более 7%. Напряжение питания обмотки возбуждения Uв=220В. • Ограничивающее требование: входной коэффициент мощности выпрямителя в номинальном режиме должен быть не ниже 0,8. • Источник питания трехфазная сеть 220/380В (+10% – 15%) с доступной нейтралью. Мощность короткого замыкания сети в узле присоединения преобразователя Sкз=5000кВАр, т.е. Ккз=50. • Согласно приведенного алгоритма можно сделать следующие выводы. • 1) В соответствии с заданием на проектирование выпрямитель должен быть трехфазным и двухполупериодным (мостовая схема), так как требуется достаточно высокое выпрямленное напряжение. • 2) Выпрямитель обмотки возбуждения также трехфазный, но в связи с невысоким значением выпрямленного напряжения может быть выполнен по однополупериодной схеме. Поскольку коэффициенты преобразования по напряжению выбранных схем выпрямителей различаются в два раза и их требуемые выпрямленные напряжения также различаются в два раза. • 3) Возможен вариант питания обеих схем от одной системы вторичных обмоток трансформатора. • 4) А с учетом того, что Ктр трансформатора больше единицы, но близок к ней (понижающий трансформатор), возможен вариант питания выпрямителей непосредственно от сети (без трансформатора выпрямителя). • Таким образом, экспертная система предлагает для проектировщика три альтернативных решения, и по результатам подробного расчета и моделирования надо выбрать одно • 3.3. АЛГОРИТМ ПРОЕКТИРОВАНИЯ ПРЕОБРАЗОВАТЕЛЯ ПОСТОЯННОГО НАПРЯЖЕНИЯ • Обобщенную структурную схему преобразователя постоянного напряжения (ППН) можно представить в виде совокупности импульсного элемента (ИЭ) – преобразующего постоянное входное напряжение Е в последовательность однополярных импульсов и содержащего силовой ключ (К) с трансформатором (Т) и выпрямителем (В), и фильтра (Ф) для сглаживания пульсаций выходного напряжения ППН Е ИЭ К Т В Ф H CУ • В базовых схемах ППН трансформатор и выпрямитель отсутствуют. • Регулирование выходного напряжения ППН осуществляется изменением коэффициента заполнения импульсов: • Uвых=КтЕ(Тимп/Т), • где Кт – коэффициент трансформации трансформатора, • Тимп – длительность импульса, • Е – напряжение источника питания • Т – период следования импульсов. • Основные исходные данные для проектирования ППН: • • мощность нагрузки и диапазон ее изменения; • • напряжение питания и диапазон его изменения; • • выходное напряжение или ток; • • требуемый закон регулирования; • • возмущающие воздействия по цепям питания, нагрузки и управления; • • условия эксплуатации. • В качестве ограничений при проектировании выступают требования ТЗ: -допустимый коэффициент пульсаций выходного напряжения, -статическая и динамическая ошибка, -требуемая надежность и др. Структурная схема алгоритма проектирования ППН Начало Ввод исходных данных L K+1 = L K + L min , расчёт схемы L Проектирование компонентов Определение m , P , Да m i+1 < m i Нет Вывод оптимального варианта Синтез СУ Анализ режимов Конец • В соответствии с существующими методиками расчета и принципом работы, проектирование ППН осуществляется в следующей последовательности: • 1.По заданному диапазону изменения нагрузки определяется минимальное значение индуктивности дросселя фильтра Lmin, при котором выполняется условие непрерывности тока дросселя U L Tимп Lmin I доп • , • где Iдоп – допустимая пульсация тока в дросселе фильтра при напряжении на нем UL и длительности импульса Тимп. • • • • • • • • • 2.При выбранном значении индуктивности дросселя рассчитываются требуемая емкость конденсаторов входного и выходного фильтров, электрические режимы остальных элементов схемы. При выборе емкости конденсатора выходного фильтра должно выполняться условие Сф max Cп , СТ , Ск р где Сп – значение емкости, обеспечивающее требуемый уровень пульсаций, СТ – значение емкости, обеспечивающее выполнение условия Тф2Т, где Т – длительность периода квантования импульсного элемента, – значение емкости, обеспечивающее Lф Ск р 1 Rн2. мин минимальную колебательность системы. Здесь – прогнозируемый КПД преобразователя. • • • • • • • 3.В программах проектирования компонентов производится проектирование и оптимизация дросселя, блока входных и выходных конденсаторов, силовых полупроводниковых элементов схемы, трансформатора. 4.Определяются суммарные потери мощности и масса элементов преобразователя. 5.При проектировании ППН важно добиваться уменьшения их массы и габаритов при высоком КПД. Этого можно добиться увеличением индуктивности дросселя фильтра LФ и увеличением рабочей частоты F. В первом случае, при увеличении LФ, уменьшается загрузка остальных элементов схемы, а следовательно и их масса. Во втором случае уменьшается установленная мощность и масса элементов фильтра, но увеличиваются динамические потери в ключевых и магнитных элементах схемы, а также в конденсаторах фильтра. Отсюда следует, что в качестве независимых переменных следует выбрать индуктивность Lф дросселя фильтра и рабочую частоту F, если она не определена в ТЗ, а алгоритм оптимизации ППН может быть реализован следующим образом. . • 6.Направленным варьированием (увеличением) индуктивности сглаживающего дросселя и повторением пунктов 1 – 4 проводится минимизация приведенной массы устройства при заданной частоте коммутации • 7.Если рабочая частота ППН не задана в ТЗ, ее оптимальное значение определяется проектированием ППН по описанному алгоритму при различных значениях частоты. • Верхняя и нижняя границы зоны поиска оптимальной частоты ограничиваются параметрами элементной базы, мощностью нагрузки, требованиями электромагнитной совместимости и постоянно изменяются. • Например, 10 лет назад диапазон рабочих частот ППН составлял 10–30кГц, в настоящее время 50–200кГц. • 8.Часто наиболее целесообразным является вариант параллельного включения унифицированных модулей. • При этом мощность модулей и их рабочая частота зависят от множества факторов: параметров элементной базы, условий эксплуатации, назначения, технологий изготовления. • • • • 9.Синтез структуры и параметров схемы управления (СУ). При синтезе СУ необходимо определить структуру и параметры корректирующих звеньев. Как правило, корректирующие звенья подключаются в цепь обратной связи усилителя сигнала ошибки. Выбор параметров корректирующих цепей необходимо производить на худший случай (худшее сочетание параметров нагрузки и напряжения питания). В частности, при изменении нагрузки меняются параметры фильтра (индуктивность), при этом существует критическая мощность нагрузки, которой соответствует минимальное затухание (максимальная колебательность) системы. Критическое значение сопротивления нагрузки можно определить по формуле • Rн.кр » , 1 – • где Lф / Cф характеристическое сопротивление фильтра. Для этого случая и надо рассчитывать параметры СУ. • 3.4. ОПТИМИЗАЦИЯ ИНВЕРТОРА С ФИЛЬТРОМ ВЫХОДНОГО НАПРЯЖЕНИЯ ПРИ ПРОЕКТИРОВАНИИ НА МИНИМУМ МАССЫ • Существуют следующие способы формирования синусоидального выходного напряжения инверторов: амплитудная модуляция, импульсная модуляция, использование фильтров и комбинация перечисленных способов. • Мощность инвертора определяется полной мощностью нагрузки, а концепция оптимизации при проектировании инверторов основана на перераспределении полной мощности между его элементами за счет компенсации реактивной мощности нагрузки и ограничения токов и мощности высших гармоник. • Структурная схема инвертора VT • • • TV VT – блок силовых транзисторов, TV – силовой трансформатор, Ф – фильтр. Ф Н • При этом необходимо учитывать зависимость КПД инвертора от сosφ нагрузки, которая выражается Рн соотношением ИФ Р (1) Р н • сos н , • где Р(1) – потери мощности в инверторе при сos = 1. • Полная расчетная мощность элементов инвертора зависит от степени компенсации реактивной мощности нагрузки компенсирующим конденсатором фильтра, включаемым параллельно нагрузке, в соответствии с выражением Sни Pн2 (Qн QCK )2 • • где QCK – мощность компенсации. • От степени компенсации зависит также КПД Pн инвертора, так как сos н 2 2 P ( Q Q ) н н CK • . • Мощность высших гармоник определяется гармоническим составом напряжения на входе фильтра и уменьшается в инверторах модуляционного типа за счет уменьшения амплитуды и числа действующих гармоник. • Следовательно, комбинируя способы модуляции прямоугольного напряжения и структуру, и параметры фильтра, можно добиться оптимального сочетания массогабаритных и энергетических показателей, соответствующего экстремуму заданного критерия. • При этом, для выбранного типа фильтра, основными независимыми переменными при проектировании инвертора будут: • 1. Тип модуляции (угол управления силовыми транзисторами), определяющий спектральный состав напряжения на входе фильтра. • 2. Мощность компенсации QCK, определяемая емкостью компенсирующего конденсатора Ск. • При проектировании инвертора необходимо дополнительно учесть следующие ограничения: • 1.Коэффициент передачи первой гармоники Г-образного 1 фильтра зависит от нагрузки K п1 • 1 2 ctg 2 н • поэтому такие фильтры используют в схемах с пониженным содержанием гармоник, например в схемах модуляционных инверторов, для которых отношение волновых сопротивлений последовательного и параллельного элементов фильтра 0. • Для резонансного фильтра Kп1 1 и не зависит от ε и он применяется в основном при прямоугольном напряжении на входе фильтра. • 2.При проектировании фильтров необходимо учитывать, что должно выполняться условие 1 , где X LФ (1) , Х(1) – 2 X CK (1) min • сопротивления элементов фильтра по первой гармонике. • Выполнение этого ограничения обеспечивает отсутствие резонанса и, следовательно, перегрузки по низшей в спектре гармонике с номером min. • • • 3.Можно показать, что по условию оптимальности фильтра должно выполняться соотношение tg н Если это условие не выполняется, следует подключить параллельно нагрузке дополнительную индуктивность Lдоп, чтобы выполнялось Qдоп Qн ограничение: Рн 4.Для компенсации влияния токов высших гармоник на динамические потери в транзисторах иногда целесообразно увеличить ёмкость компенсирующего конденсатора, при этом ток переключения VT можно сделать равным нулю. Структурная схема алгоритма проектирования инвертора • 1.Краткое описание алгоритма. Из библиотеки выбирается модель схемы, проводится расчет токов и напряжений в схеме при принятых допущениях, связанных с идеализацией или упрощением моделей элементов схемы, и по заданному значению коэффициента гармоник определяются параметры фильтра. Затем по соответствующим программам производится проектирование компонентов, после чего определяются суммарная масса и потери мощности в схеме. • 2.Первый цикл оптимизации – по степени компенсации реактивной мощности нагрузки. Изменением емкости компенсирующего конденсатора добиваются экстремального значения заданного критерия. • 3.Второй цикл – изменение угла управления силовыми ключами (способа модуляции). Минимизируя спектральный состав напряжения на входе фильтра, добиваются наилучшего значения критерия. • 4.В результате отыскивается глобальный экстремум критерия проектирования. • 3.5. ПРОЕКТИРОВАНИЕ КОМПОНЕНТОВ СХЕМ УСТРОЙСТВ СИЛОВОЙ ЭЛЕКТРОНИКИ • В соответствии с итерационным характером процесса проектирования программа расчёта любого компонента должна включать две связанные подпрограммы "синтез", то есть собственно проектирование узла и "анализ" – проверочный расчёт с определением основных параметров схемы замещения, потерь мощности, перегрева и т.д. при задании режимов, отличающихся от тех, для которых узел спроектирован. • Тогда типовой алгоритм проектирования компонентов должен включать следующие блоки: • 1.Вызов модели узла из библиотеки. • 2.Выбор: "синтез", "анализ". • 3.Задание рабочих режимов (исходных данных). • 4.Расчёт основных характеристик, а в задаче синтеза и оптимизация компонента по принятому критерию, варьированием по заданному алгоритму основных независимых переменных. • 5.Проверка соответствия заданным требованиям (ограничениям). • • 3.6. ПРОЕКТИРОВАНИЕ ЭЛЕКТРОМАГНИТНЫХ УЗЛОВ • Алгоритм машинного расчёта трансформаторов и дросселей, как правило, основан на методе рационализированного перебора независимых переменных путем расчёта на заданный перегрев, при условии получения минимальной массы при оптимальном соотношении потерь в магнитопроводе РС и катушке РК. • Для тороидальных трансформаторов естественного режима (ТЕР) оптимальным считается равенство этих потерь между собой РС = РК. • Независимыми переменными при проектировании трансформаторов и дросселей являются: тип и материал сердечника, перегрев (плотность тока), коэффициент запаса по индукции (рабочая индукция), тип обмоточного провода. • Расчет начинается с первого (наименьшего) сердечника в ряду магнитопроводов с дальнейшим перебором до выбора оптимального варианта. • Начальные значения электромагнитных нагрузок (индукция и плотность тока) вычисляются по характеристикам материала и геометрическим размерам, которые занесены в массив табличных данных. • Расчётная индукция B выбирается не больше предельно допустимой, равной индукции насыщения Вs. • Проводится предварительный электрический расчёт. Если площади сечения одного провода не достаточно, то берётся несколько сложений провода. • Расчёт потерь ведется с учётом вихревых токов и перегрева трансформатора. При превышении перегрева производится пересчёт трансформатора на больший сердечник. • Все основные циклы, связанные с перебором параметров проектирования, наглядно представлены на блок-схеме, их предлагается проанализировать самостоятельно. • В программе расчета трансформатора цикл по Рс/Рк=1 разомкнут. Проектировщик, меняя коэффициент запаса по индукции и перегрев, может добиться оптимального сочетания потерь в сердечнике и обмотке с учётом всего множества влияющих факторов. • На печать выводится значение массы трансформатора, его геометрические размеры, энергетические показатели, ток холостого хода, напряжение короткого замыкания, данные обмоток и другие параметры, необходимые для конструкторской проработки и изготовления трансформатора, а также параметры схемы замещения для схемотехнического моделирования трансформатора. • В программу введены характеристики магнитных материалов разных типов: электротехническая сталь Э360, пермаллои 34НКМП, 79НМ, феррит Н2000НМ и др. Это позволяет правильно выбрать материал сердечника в зависимости от рабочей частоты. • В программы проектирования электромагнитных элементов занесены кривые намагничивания всех используемых материалов и зависимости удельных потерь от рабочей индукции и частоты. Все основные расчетные соотношения в программах проектирования берутся из типовых методик расчета. • Программа расчёта дросселя выполнена по аналогичной структуре. Введено дополнительное условие по учету напряжённости магнитного поля в сердечнике, а число витков определяется из условия получения требуемой индуктивности при заданном токе подмагничивания. Структурная схема алгоритма проектирования трансформатора • АЛГОРИТМ ПРОЕКТИРОВАНИЯ СИЛОВЫХ ПОЛУПРОВОДНИКОВЫХ КЛЮЧЕЙ • Концепция оптимизации полупроводниковых ключей ЭУ заключается в определении оптимального соотношения между количеством транзисторов выбранного типа (степенью их загрузки) и требуемой площадью теплоотвода. • При проектировании полупроводниковых ключей ЭУ используется метод направленного перебора независимых переменных. • Для биполярных транзисторов это: N – количество параллельно включенных транзисторов и q – степень их насыщения. • Критерию минимума массы транзисторного узла соответствует оптимальные N и q, при которых суммарная масса транзисторов МТ и теплоотвода минимальна: M S min T T TO • • Требуемая площадь поверхности теплоотвода определяется по формуле P1 N ST • ,где Р1 – потери в одном KT T транзисторе; N – число параллельно включенных транзисторов; Т – заданный перегрев; КТ – коэффициент теплоотдачи, учитывающий тип радиатора и способ его охлаждения; ТО – удельная масса теплоотвода (г/вт). • Потери мощности в транзисторе определяются режимом его работы в схеме и складываются из потерь в режимах отсечки Pотс I K 0U КЭзакр (1 ) • , • где UКЭзакр – напряжение на закрытом транзисторе; • потерь в режиме насыщения Р U I r I 2 к . нас кэ 0 к .ср к к • ; 2 Рб .нас U бэ0 I б .ср rб I б • ; • и динамических потерь (потерь на переключение), которые, при линейном изменении тока и напряжения на интервале коммутации, равны 1 Рд I кU к f tк К п • , 6 • где – коэффициент заполнения импульса, Кп – коэффициент перекрытия, учитывающий сквозные токи в схеме и показывающий во сколько раз реальный ток переключения больше расчетного. На начальных стадиях проектирования прогнозируется. Структурная схема алгоритма проектирования транзисторных ключей Начало Ввод исходных данных Вызов модели из библиотеки Расчёт Nmin q = 1 , qmax Да Нет q < qmax Расчёт P Нет Pi > q=q+ Pi-1 q Да Расчёт ST , SVT , M Да M i < M i-1 Нет Выбор оптимального варианта Конец N=N+1 • 1.Исходя из допустимых загрузок и заданных режимов работы силового ключа, определяется Nmin – минимальное количество параллельно включенных транзисторов. • 2.Для выбранного количества транзисторов рассчитывается оптимальная степень насыщения q, соответствующая минимальным потерям мощности Рmin. • 3.Затем, если условие плотной компоновки, когда суммарная площадь транзисторов равна площади теплоотвода, не выполняется, расчёт повторяется для N+1. • 4.При увеличении N потери P в ключе уменьшаются и, следовательно, требуется меньшая площадь теплоотвода SТ. Остановка программы происходит при выполнении условия: MT ST TO min • Аналогично строится алгоритм проектирования блока силовых диодов, оптимальные режимы работы которых определяются варьированием их типа и количества при заданных электрических режимах и условиях эксплуатации. • 3.8. ПРОЕКТИРОВАНИЕ КОНДЕНСАТОРНЫХ БЛОКОВ СГЛАЖИВАЮЩИХ ФИЛЬТРОВ • Исходные данные для проектирования: • • тип конденсатора; • • частота, амплитуда и форма пульсации тока; • • требуемая емкость на заданной частоте; • • напряжение постоянного тока; • • заданная амплитуда пульсаций напряжения; • • рабочий диапазон температур; • • заданный перегрев. • Параметры конденсатора зависят от его типономинала и конструкции, поэтому алгоритм прямого поиска оптимального решения для заданного типа конденсаторов из имеющихся в библиотеке, заключается в направленном варьировании номиналами от меньшего к большему и количеством конденсаторов каждого номинала (N < Nmax) до соответствия всем последовательно налагаемым ограничениям: рабочему напряжению, требуемой ёмкости, заданным или допустимым пульсациям напряжения, перегреву. • Такой перебор ввиду простоты алгоритма занимает минимум времени и даёт возможность найти действительный глобальный экстремум (перебором всех номиналов данного типа), выбрав для заданных электрических режимов и условий эксплуатации тип и номинал конденсаторов, обеспечивающие минимальную массу конденсаторного узла с учётом сопутствующих элементов, например предохранителей Структурная схема проектирования конденсаторных узлов фильтров Начало Ввод исходных данных Выбор типономинала Нет Uраб < Uдоп Да Расчет C( fрез,Тмин ), Nнач Нет N < Nдоп Да Расчет Z ( fпульс ,T+T), С, r C Расчёт U N = N Uраб / Uзад Нет Uрасч< min ( U зад , U доп ) U Да Расчёт P и N=N+1 Нет T Tрасч < 1.1 Tзад Да Расчёт V , M Выбор оптимального варианта Конец • Для электролитических конденсаторов с двухкомпонентной схемой замещения расчёт пульсаций производится по формулам: U I zc ( f ) • • для синусоидального тока: ; • • для несинусоидального тока можно пользоваться формулой ICc р( ) • • , U I r C f C • где Icср(+) – среднее значение тока на интервале заряда конденсатора, I – размах пульсациии тока, zc – полное сопротивление конденсатора на данной частоте. • Расчет конденсаторных блоков с определением реальной емкости и активного сопротивления на заданных частотах производится при минимальной и максимальной температурах, • на печать выводится вся необходимая для разработчика и конструктора информация. • Максимальное количество параллельно включенных конденсаторов ограничивается, т.к. дальнейшее увеличение не приводит к уменьшению пульсаций из-за возрастающей длины и сопротивления соединительных проводов. • 3.9. МЕТОДЫ ФОРМИРОВАНИЯ МОДЕЛЕЙ ЭЛЕМЕНТОВ СХЕМ В ПРОГРАММАХ ПРОЕКТИРОВАНИЯ • Программы проектирования строятся на базе моделей, описывающих основные свойства и характеристики проектируемых элементов. • Для программ проектирования используются статические модели и расчёты с использованием действующих и средних значений токов и напряжений и алгебраических уравнений. • Для статических моделей наиболее распространенными являются методы аналитического или табличного описания основных характеристик (входных, выходных и передаточных) элементов устройств электронной техники. • При использовании для формирования моделей методов регрессионного анализа для описания функции одного переменного используются полиномы вида: • y = a0 + a1x + a2x2 +.... • для функции двух переменных: • y = a0 + a1x1 + a2x2 + a3x12 + a4x1x2 + a5x22 +.... • Степень полиномов определяется по виду исследуемых характеристик и может отражать физические особенности элемента, либо назначаться по условию минимума ошибки описания. • Модель элемента в этом случае представляется набором коэффициентов ai, соответствующих данному элементу и определяемых, как правило, методом наименьших квадратов. • Кроме того, модель должна содержать описание массогабаритных характеристик элемента (тип корпуса, габариты, массу, температурное сопротивление переходкорпус) и предельно допустимые электрические параметры для правильного его выбора. • 3.10. МОДЕЛИ ЭЛЕМЕНТОВ ЭЛЕКТРОННЫХ СХЕМ В ПРОГРАММАХ ПРОЕКТИРОВАНИЯ • Формирование моделей диодов и транзисторных ключей. • Передаточная характеристика транзистора описывается полиномами второго порядка, входная и выходная – полиномами первого порядка. • B(ik , q) a0 (q) a1 (q)ik a2 (q)ik2 • U бэ (ik , q) U 0б (q) Rвхiб • U кэ (ik , q) U 0 к (q) Rвыхiк , I б I k B • Для описания зависимости коэффициентов, приведенных полиномов от степени насыщения q, принята гипербола: ai (q) c1 c2 / q • Зависимость коэффициента передачи от температуры учитывается полиномом вида BТ В25 1 Т Т К 25 • где Т – температурный коэффициент, • ТК – температура корпуса. 0 • Динамические параметры транзисторов учитываются постоянной времени транзистора: 1 • VT 2 f гр • где fгр – граничная частота. • Времена переключения транзистора связаны с постоянной времени соотношениями: q t расс 6 VT ln qвкл q выкл 1 qвыкл tвкл VT ln вкл qвкл 1 tвыкл VT ln qвыкл 1 qвыкл • Предельные значения электрических параметров – максимально допустимый ток коллектора и максимально допустимое напряжение коллектор-эмиттер определяются по графику области безопасной работы (ОБР), который, как и все остальные параметры для модели, выбирается из технических условий на данный тип транзистора и, при необходимости, доопределяются экспериментально. Структурная схема алгоритма формирования модели транзистора Ввод исходных данных Интерполяция полиномами МНК зависимостей UКЭ = f(IК , q) ; UБ = f(IК , q) ; = f(IК , q) Определение VT Формирование файла коэффициентов в библиотеку моделей транзисторов • Модели диодов для программ проектирования формируются аналогично. • Кроме предельно допустимых значений прямого тока и обратного напряжения, модель диода включает максимальное значение одиночного импульса тока в функции от его длительности для оценки правильности применения данного диода с учетом пусковых режимов в схеме. • 3.11. ФОРМИРОВАНИЕ МОДЕЛЕЙ ЭЛЕКТРОЛИТИЧЕСКИХ КОНДЕНСАТОРОВ • В основу модели положены взятые из ТУ или определяемые экспериментально зависимости импеданса z и тангенса фазового угла потерь tg от частоты f и температуры Т, а также тока утечки конденсатора Iут от температуры T и рабочего напряжения Uраб. • К основным параметрам электролитического конденсатора относятся фактическая емкость и активная составляющая полного сопротивления, определяющая наряду с током утечки потери мощности в конденсаторе в функции от рабочей частоты. Схема замещения и векторная диаграмма электролитического конденсатора UL Ur LC U rC C UC Rут IC • Основные параметры конденсатора связаны соотношениями, которые соответствуют векторной диаграмме: tg rC C rC z Sin X C z Cos z tg 1 tg 2 xC 1 C z 1 tg 2 C 1 tg 2 z Зависимости z = f(f, T) и tg = f(f, T), которые описываются полиномами в процессе формирования модели, позволяют рассчитать основные характеристики конденсатора для любой частоты и температуры. • В качестве исходных данных для описания зависимостей • tg =f(f,T), z= f(f,T), Iут =f(T) • используются взятые из ТУ типовые характеристики и результаты экспериментальных исследований. • На каждой из частот определяются параметры • zf U V 2 Rщ UV 1 2 r • и по приведенным выше формулам C и C • Для аналитического описания указанных зависимостей используют интерполяционные полиномы, коэффициенты которых получают методом наименьших квадратов, и в качестве параметров модели заносят в библиотеку. . Схема измерений параметров конденсатора V1 Rш V2 Г3-34 G~ В3-7 + G= - Б1-18 Ф2-1 • Наличие индуктивности в схеме замещения конденсатора приводит к появлению резонансной частоты и для частот больших резонансной частоты полное сопротивление конденсатора становится индуктивным. • Порядок резонансной частоты для электролитических конденсаторов в соответствии находится в пределах 50 кГц...3 МГц. • С, мкФ 1000 470 100 10 • F, МГц 0.05 0.12 0.25 3 • Для компенсации индуктивности в широком диапазоне частот и сглаживания высокочастотных пульсаций параллельно электролитическим подключаются высокочастотные керамические конденсаторы. • Токи утечки (мкА) рассчитываются по формулам, приведённым в ТУ. Например, для конденсатора К52–5 с напряжением U = 50 В: • I ут 2CU раб (0.038t 0.25) • Рассеиваемая мощность и перегрев равны P • 2 rC T P I д U раб I ут N S kS N • где – коэффициент теплоотдачи; S - площадь боковой поверхности конденсаторов; kS – коэффициент использования боковой поверхности для теплообмена, N – количество конденсаторов. • Кроме перечисленных параметров, модель конденсатора должна быть дополнена его конструктивными параметрами: массой, боковой поверхностью, габаритными размерами. • 3.12. МОДЕЛИ ТРАНСФОРМАТОРОВ И ДРОССЕЛЕЙ В ПРОГРАММАХ ПРОЕКТИРОВАНИЯ • Модели включают описание характеристик магнитных материалов: • • зависимость удельных потерь РC0 от частоты, описываемая логарифмическим полиномом первой степени log Pсо = a + b log F; • • для прессованных сердечников зависимость тангенса угла потерь от частоты F и напряженности H, описываемая полиномом вида: • tg=a0+a1F+a2H+a3FH; • • семейство кривых намагничивания В(Н) для различных частот, описываемое методом кусочнолинейной аппроксимации. • Параметры сердечников, каркасов, обмоточных проводов, изоляционных материалов, коэффициенты теплопроводности и теплоотдачи, и др. сведены в таблицы и составляют конструкторскую часть модели. • Параметрами магнитопроводов (сердечников) являются: граничная индукция, индукция насыщения, типоразмер и масса сердечников, толщина ленты и коэффициент заполнения магнитным материалом для витых сердечников (для прессованных сердечников коэффициент заполнения равен единице), теплоемкость материала сердечника. • Основными параметрами обмоточных проводов являются: удельное сопротивление материала (меди), температурный коэффициент изменения сопротивления меди, удельный вес и теплоемкость меди, диаметр каждого типономинала обмоточного провода с изоляцией и без, коэффициент укладки для данного типономинала провода. • К основным параметрам изоляции относятся: толщина межслоевой и межобмоточной изоляции, толщина изоляции на наружной стороне: удельная масса и теплоемкость изоляции при пропитке. • Модель каркаса включает следующие параметры: материал, габаритные размеры, толщина стенок, масса и теплоемкость.