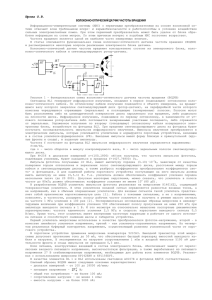
О выборе импульсных СШП зондирующих сигналов для
advertisement

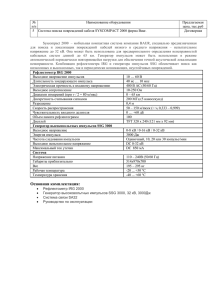
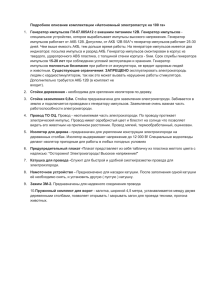
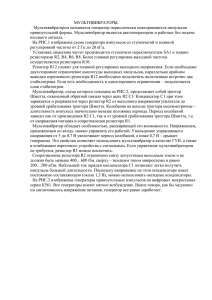
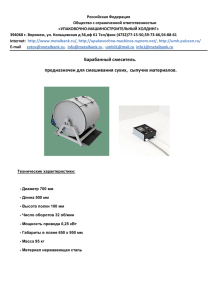
1 О выборе импульсных СШП зондирующих сигналов для обнаружения людей «сквозь стены» и в завалах В.С. Черняк Семинар в МГТУ им. Н.З. Баумана, 28 января 2010 г. Введение 2 1. Проблема обнаружения и определения местоположения людей «за стенами» и в завалах становится все более актуальной. Часто для ее решения предлагаются СШП радиолокаторы с очень высоким разрешением по дальности. 2. Особенно трудно обнаружить неподвижных людей, так как: – полезные сигналы маскируются интенсивными пассивными помехами (отражениями от окружающих предметов); единственное различие полезных сигналов – малые и медленные изменения задержки, вызванные квазипериодическими колебаниями поверхности тела при дыхании и сердцебиении; – ЭПР движущейся части поверхности тела человека мала; – сигналы резко ослабляются при распространении через строительные конструкции. Поэтому очень важен зондирующего сигнала рациональный выбор Типы зондирующих сигналов 3 Два типа импульсных СШП сигналов с разрешением по дальности R=c/2f: 1) импульсы произвольной длительности с ВИМ и 2) короткие импульсы длительностью p = 1/f. Два класса импульсов одинаковой длительности p=1/f: 1) “видеоимпульсы” (без несущей) и 2) импульсы с несущей. 1) “видеоимпульс” p = 2 нс без несущей и его спектр 2) импульс p = 2 нс с несущей fср = 3.5 ГГц и его спектр Преобразования формы сигналов Наиболее важное различие сигналов: относительной ширины спектра f/fср отр()=пад () K отр() 1) 4 значения 2) Импульсы от идеальной плоскости при нормальном падении f/fср 1 f/fср 0.17 Видеоимпульс генератора и импульсы, отраженные от человека Обнаружение коротких “видеоимпульсов” 5 Оптимальный по критерию обобщенного отношения правдоподобия алгоритм обнаружения последовательности М импульсов неизвестной, но одинаковой формы при известном 2 M 1 периоде повторения (ПП) Tr L x(t td kTr ) dt 0 k 0 Input Gate Squar er c om p a r a tor Использует полную энергию когерентной суммы М принятых импульсов в М соседних ПП. Трудно реализовать. Обычно применяется стробоскопический метод. При этом полная энергия Y es каждого принятого импульса собирается из N отсчетов в No течение N соседних ПП. U threshold Энергетические потери: E = NTr str/Tr. Типичные значения 40…50 dB (N=200…2000; Tr str= 2…10 мкс; Tr = 50…60 нс ) Обнаружение коротких импульсов с несущей 6 t kTr 2 exp j0 t kTr Излученный сигнал: srad (t) A rad exp 2 k t kTr i Принятый сигнал: sR t A i exp p2 i k p 2 exp j 0 (t kTr i i Оптимальный алгоритм (критерий отношения правдоподобия): 1) когерентная обработка каждого импульса, 2) когерентное суммирование результатов п. 1), 3) когерентное подавление пассивных помех, 4) вычисление модуля (или его монотонной функции). Корреляторы лучше чем согласованные фильтры, так как работают как стробы пространственной селекции и фазовые детекторы Простое когерентное суммирование устраняет различие полезных сигналов и пассивных помех: фазовые вариации вызванные дыханием Ключевая идея: использовать очень большое различие частоты повторения импульсов Fr и частоты F дыхания (около 7 порядков). Обнаружение коротких импульсов с несущей Время наблюдения T делится на K интервалов длительностью t, где фаза полезного сигнала почти постоянна. Когерентное суммирование в этих интервалах сочетается с некогерентным суммированием K когерентных сумм (после когерентного подавления помех). 7 Опорные сигналы корреляторов: 2 n 1 s c (t ) [ t ( q 0.5) t kT ] cos 0 t q 0.5 t kTr 0 r 0 ref A0 exp . s 2 sin t q 0.5 t kT p k 0 0 r 0 sref (t ) Когерентная сумма в q-м интервале (q = 1,…,K, n = t/Tr): 2 c n 1 t q 0.5 t kTr 0 cos 0 t q 0.5 t kTr 0 ycorr q A0 dt. s x t exp 2 sin 0 t q 0.5 t kTr 0 p ycorr q 2 k 0 Когерентное подавление помех: z y c q K c corr q 1/ K y i 1 c corr i z y s q ; K s corr q s 1/ K ycorr i. i 1 Выходная статистика и сравнение с порогом: K 2 2 c s L zq zq h. q 1 Обнаружение коротких импульсов с несущей 8 Опорн. сигнал sin Корр.1 Когер. S От МШУ Режект. фильтр Квадратор S Корр.2 Когер. S Режект. фильтр Некогер. S Квадратор Опорн. сигнал cos Эффективный алгоритм обнаружения Да Порог Нет Uп Характеристики обнаружения s (t) 2 / c R 0 R sin(2Ft ) 9 p = 2 нс; f0 = 3.5 ГГц; R = 1 см; F=0.25 Гц; t = 0.1 с; K = 200. 1: Рлт=102; 2: Рлт = 104; 3: Рлт =106 Если Fr=15 МГц, n = 1.5*106 = 61.8 дБ. Чтобы P0= 0.9 отношение E/N на входе приемника должно быть ( 65.8… 63.3 )дБ Главный недостаток сигналов с несущей: большее ослабление в материалах 10 (A.R. Hunt, “Image formation through walls using a distributed radar sensor network, Proc. of SPIE conf., vol. 5778, May 2005) 11 (L. Frazier, “Radar surveillance through solid materials” SPIE Photonics East conference. 1996, Boston, MA, paper 2938-20) Ослабление разность между кривыми (0.6 м бетонная плита) (M. Aftanas et al. “Through wall imaging of the objects scanned by M-sequence UWB radar system”. Radioelektronika 2008. 23-25 April, Prague, Czech Republic) 12 Ослабление в стене толщиной 0.3 м (M. Aftanas et al. “Through wall imaging of the objects scanned by M-sequence UWB radar system”. Radioelektronika 2008. 23-25 April, Prague, Czech Republic) 13 Cравнение ослабления с потерями стробоскопического метода 14 Для сигналов с несущей и железобетонной плиты толщиной 20 см: ▪ на f0 = 3.5 ГГц ослабление «туда и обратно» около 66 дБ на 48 дБ больше, чем для рассматриваемых «видео» импульсов; ▪ на f0 = 2.25 ГГц ослабление «туда и обратно» около 46 дБ на 28 дБ больше, чем для рассматриваемых «видео» импульсов Для стробоскопического метода с типичными параметрами: N = 2000, Fr str = 500 кГц, Fr = 15 MГц энергетические потери: E = N*Fr/Fr str = 2000*15*106/ 5*105 = 6*104 48 дБ. Эффективный алгоритм обнаружения коротких импульсов с несущей компенсирует увеличение ослабления сигнала в 20-см железобетонной плите на частоте f0 = 3.5 ГГц и дает значительные преимущества на частоте f0 = 2.25 ГГц Для других конструкционных материалов преимущество коротких зондирующих импульсов с несущей может быть больше. Пример Рассмотрим СШП радар с параметрами: R 300K; S = 0.25; p=2 ns. ЭПР = 0.2 m2; 15 max= 8 m; G = 2.5; Tn = 2 Если требуемое значение отношения с/ш на входе qreq = 66 dB, импульсная мощность передатчика должна быть: 4 2 643Rmax kTnqreq 643*84*1.38*1023*300*0.25*106 9 Pp 2.56 *10 Вт 2 2 9 2 2 0.71pG S 0.71* 2*10 *2.5 *0.086 *0.2*0.25 Если ослабление сигнала в конструкционных материалах при распространении «туда и обратно» достигает 80 дБ, импульсная мощность передатчика должна быть только 260 мВт при средней мощности 7.8 мВт. В случае большего ослабления сигнала эту мощность можно увеличить. Выводы 16 1. Если для СШП радара малой дальности важна совмещенная приемопередающая антенна, следует применять короткие импульсы. Их дополнительное преимущество – отсутствие боковых лепестков по дальности, ухудшающих выделение сигнала на фоне пассивных помех. 2. Принятые сигналы, как правило, очень слабые. Поэтому необходим эффективный алгоритм для надежного обнаружения «цели». 3. Короткие СШП импульсы могут быть двух типов: 1) «видео» импульсы (без несущей) и 2) импульсы с несущей. Импульсы обоих типов могут иметь одинаковые форму и ширину спектра, но центральная частота спектра импульсов с несущей смещена на несущую частоту. 4. Важная особенность СШП «видео» импульсов – большое значение относительной ширины спектра (близкой к 1 или больше), что приводит к неизвестным изменениям формы импульсов при излучении, распространении, отражении и приеме сигналов. Согласованная обработка невозможна. 5. Широко применяемый стробоскопический ведет к большим энергетическим потерям. метод 17 6. Относительная ширина спектра СШП импульсов с несущей не превышает 0.15...0.25. Форма принятых и излученных импульсов практически одинакова. Возможна эффективная согласованная обработка. 7. Главный недостаток импульсов с несущей – увеличение ослабления сигналов в конструкционных материалах с ростом частоты. Однако во многих материалах это ослабление невелико (известняк, кирпич, каменная кладка и др.). Больше всего ослабляется сигнал в железобетоне. Тем не менее, показано, что даже в этом случае эффективный алгоритм обнаружения импульсов с несущей может обеспечить надежное обнаружение даже при очень большом ослаблении сигнала. 8. Таким образом, короткие импульсы с несущей можно рекомендовать в качестве зондирующих сигналов для СШП радаров малой дальности для наблюдения «сквозь стены» и поиска людей в завалах.