Презентация ЭММ
advertisement

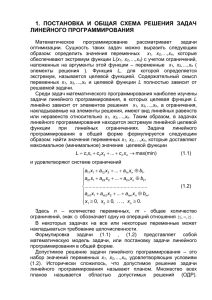
Экономикоматематические методы и модели Курс лекций 1. Введение 2. Линейное программирование. 3. Определение опорного плана. Выпуклые множества. 4. Свойства решений задачи линейного программирования. 5. Графический метод решения ЗЛП. 6. Неединственность оптимального решения. 7. Симплексный метод решения ЗЛП. 8. Метод искусственного базиса. 9. Двойственность в линейном программировании 10. Правила составления двойственных задач. 11. Транспортная задача. 12. Построение первоначального опорного плана. 13. Методы северо-западного угла и минимальной стоимости. 14. Метод потенциалов. 15. Открытая модель транспортной задачи. 16. Производственные функции 17. Балансовые модели. 18. Динамическое программирование Введение Данный курс охватывает достаточно обширный круг математических методов и моделей, в том числе и моделей оптимизации, которые нашли широкое применение в экономической науке. Например, в модели поведения потребителя предполагается, что он ищет максимум полезности. Модели фирмы основаны на предпосылке максимума прибыли для предпринимателя. Модели рынка - на предпосылке оптимальных стратегий участников обмена. Модели общего равновесия – на предпосылке цен оптимального плана. Модели воспроизводства – на предпосылке оптимального роста. При изучении дисциплины “ ЭММ и модели “ особое внимание уделяется не только изучению известных моделей и методов моделирования, но и анализу этих моделей, применению их на практике с учетом конкретных условий. • Экономико-математическое моделирование, является одним из эффективных методов описания сложных социально-экономических объектов и процессов, позволяющих овладеть искусством принятия управленческих и инвестиционнофинансовых решений, распределения и оптимизации ресурсов, анализа и обработки данных и прогнозирования последствий. • Экономико-математические методыобобщающее название комплекса экономических и математических научных дисциплин, объединенных для изучения социально-экономических систем и процессов. Раздел математики, который занимается решением задач о нахождении экстремума функции на множествах, определяемых линейными или нелинейными ограничениями, называется математическим программированием. Математическое программирование включает такие разделы как • • • • линейное программирование нелинейное программирование динамическое программирование теория игр. Линейное программирование. Разработка моделей линейного программирования. • Линейное программирование- это наука о методах исследования и отыскания наибольшего и наименьшего значений линейной функции ( которую будем называть целевой функцией) на неизвестные которой наложены линейные ограничения. Разработка моделей линейного программирования включает следующие основные этапы: - определение переменных задачи, -представление ее ограничений в виде линейных уравнений или неравенств; - задание линейной целевой функции подлежащей минимизации или максимизации. Задача технического контроля • В ОТК некоторой фирмы работают контролеры 1 и 2 разрядов. Норма выработки ОТК за 8 часовой рабочий день составляет неменее 1800 изделий. Контролер 1 разряда проверяет 25 изд./час , причем не ошибается в 98% случаев. Контролер 2 разряда проверяет 15 изд./час, его точность- 95%. Заработная плата контролера 1 разряда равна 4 д.е./час, контролер 2 разряда получает 3. д.е./час. При каждой ошибке контролера фирма несет убыток в размере 2 д.е. • Фирма может использовать 8 контролеров 1 разряда и 10 контролеров 2 разряда. Руководство фирмы хочет определить оптимальный состав ОТК, при котором общие затраты на контроль будут минимальны. Задача составления рациона Питательные вещества Кол-во единиц пит. вещ-в в 1 кг корма A Корм 1 2 Корм 2 1 B 2 3 C 3 4 Стоимость 1 кг корма 5 7 Общей задачей линейного программирования называется задача, которая состоит в определении max (min) значения функции n Z C j x j j 1 при условиях и n a ij x j bi , j 1 n a ij x j bi , j 1 x j 0. л и(i н е й н ы(i х о г р а н и ч 1,2, , k ), k 1, , m), • Стандартной (симметричной) задачей ЛП наз-ся задача , которая состоитв определении оптимального значения функции n Z C j x j j 1 при условиях aij x j bi , (i 1,2,..., m), j 1 x 0, ( j 1,2,..., n). j n Основной (или канонической) задачей линейного программирования называется задача, которая состоит в определении оптимального значения функции n Z C j x j j 1 при выполнении условий a x b , (i 1,, m), ij j i j 1 x 0. j n Совокупность чисел X x ; x ;....; x 1 2 n удовлетворяющих ограничениям задачи называется допустимым решением (или планом). Оптимальным решением ЗЛП называют допустимое решение 1 2 n X ( x ; x ;; x ) при котором целевая функция принимает максимальное или минимальное значение. • Совокупность чисел X x1 ; x2 ;....; xn удовлетворяющих условию aij x j bi наз-ся оптимальным • 1) n Z C j x j min j 1 n Z1 Z C j x j max j 1 Замена неравенств уравнениями • Каждому решению X 1 ; 2 ;...; n неравенства a1 x1 a2 x2 ... an xn b (1) соответствует единственное решение Y 1 ; 2 ;...; n ; n1 уравнения a1 x1 a2 x2 ... an xn xn1 b и неравенства x n 1 0 (2) (3) И наоборот каждому решению Y уравнения (2) и неравенства (3) соответствует единственное решение X неравенства (1) Z c1 x1 c2 x2 ... cn xn max a11 x1 a12 x2 ... a1n xn b1 , a x a x ... a x b , 21 1 22 2 2 n n 2 ........................................ a x a x ... a x b , m2 2 mn n m m1 1 x 0 . j Z c1 x1 c2 x2 ... cn xn 0 xn1 0 xn2 ... 0 xnm max a11 x1 a12 x2 ... a1n xn xn1 b1 , a21 x1 a22 x2 ... a2 n xn xn 2 b2 , ................................................ a x a x ... a x x b , m2 2 mn n nm m m1 1 x j 0. Z c1 x1 c2 x2 ... cn xn min a11 x1 a12 x2 ... a1n xn b1 , a x a x ... a x b , 21 1 22 2 2 n n 2 ........................................ a x a x ... a x b , m2 2 mn n m m1 1 x j 0. Z c1 x1 c2 x2 ... cn xn 0 xn1 0 xn2 ... 0 xnm a11x1 a12 x2 ... a1n xn xn1 b1 , a21x1 a22 x2 ... a2 n xn xn2 b2 , ................................................ a x a x ... a x x b , m1 1 m2 2 mn n nm m x j 0. Векторная форма записи задачи линейного программирования. • Минимизировать линейную функцию Z C X при ограничениях (*) где A1 x1 A2 x2 ... An xn A0 C c1 ; c2 ;...;cn , X x1 ; x2 ;...; xn , X 0 , a11 a 21 A1 ... a m1 a12 a22 A2 ..... ... am 2 b1 b2 A0 ... bn a1n a2 n An , ... am n Матричная форма записи задачи линейного программирования. Z C X Минимизировать линейную функцию при ограничениях AX A0 , X 0, где C c1 ; c2 ;...;cn - матрица-строка, A aij mn матрица-системы x1 x2 X ... xn b1 b2 A0 ... bm матрица-столбец матрица-столбец Определение опорного плана. Выпуклые множества. План X x1 ; x2 ;....; xn называется опорным, если векторы Ai i 1,...,m , входящие в разложение (*) с положительными коэффициентами xi являются линейно независимыми. Выпуклые множества Пусть на плоскости x1 0x2 заданы две точки A1 x1 ' , x2 ' , и A2 x1 ", x2 " определяющие отрезок A1 A2 x2 A1 A A2 x1 Точка A ,для которой выполняется условие A A A , 1 1 где 1 0 , 2 0 , 2 2 1 2 1 называется выпуклой линейной комбинацией точек A1 и A2 . Точки A1иA2 называются угловыми или крайними точками отрезка A1 A2 . Угловая точка не может быть представлена как выпуклая линейная комбинация двух других точек отрезка. Пусть имеется n точек A1 , A2 ,..., An n -мерного пространства, то точка A – выпуклая линейная комбинация, если выполняется условие A 1 A1 2 A2 ... n An Множество точек называется выпуклым, если оно вместе с любыми двумя точками содержит и отрезок их соединяющий. Геометрический смысл: Множеству вместе с его двумя произвольными точками полностью принадлежит и прямолинейный отрезок, их соединяющий. Точка множества называется граничной, если любой шар сколь угодно малого радиуса с центром в этой точке содержит как точки принадлежащие множеству, так и точки не принадлежащие ему. Граничные точки множества образуют его границу. Замкнутое - множество, содержащее все свои граничные точки. • В треугольнике угловые точки – вершины. • Угловые точки круга- точки окружности, которая его ограничивает. • Выпуклое множество может иметь конечное или бесконечное число угловых точек. Выпуклый многоугольник - выпуклое замкнутое ограниченное множество на плоскости, имеющее конечное число угловых точек. Опорная прямая выпуклого многоугольника - прямая, имеющая с многоугольником расположенным по одну сторону от ее, хотя бы одну общую точку. L A B F C K E D M N Свойства решений задачи линейного программирования. Теорема 1: Множество всех планов задачи линейного программирования выпукло. Теорема 2: Линейная функция задачи линейного программирования достигает своего оптимального значения в угловой вершине многоугольника решений. Если линейная функция принимает оптимальное значение более, чем в одной угловой точке, то она достигает того же значения в любой точке, являющейся выпуклой линейной комбинацией этих точек. Теорема 3: Если известно, что система векторов A1 , A2 ,..., Ak , k n в разложении A1 x1 A2 x2 ... An xn A0 , X 0 линейно независима и такова, что, A1 x1 A2 x2 ... Ak xk A0 , где все x j 0 , то точка X x1 , x2 ,..., xk ,0...0является угловой точкой многоугольника решений. X – n-мерный вектор; n-k – компонент 0. Теорема 4: Если X x1 , x2 ,..., xn – угловая точка многоугольника решений, то векторы в разложении, соответствующие положительным x j 0 , являются линейно независимыми. Следствие 1: Так как векторы A1 , A2 ,..., Anимеют размерность m , то угловая точка многоугольника решений имеет не более чем m положительных компонент xi 0 i 1,...,m Следствие 2: Каждой угловой точке многоугольника решений соответствует km линейно независимых векторов системы A1 , A2 ,..., An Графический метод решения ЗЛП. Графический метод основан на геометрической интерпретации задачи линейного программирования. Z c1 x1 c2 x2 min Найти минимальное решение функции a11 x1 a12 x2 b1 , a x a x b , 21 2 22 2 2 ... ... ... am1 x1 am 2 x2 bm , x1 0 x2 0 Предположим, что эта система совместна (имеет хотя бы одно решение) и ее многоугольник решений ограничен. Линейная функция Z при фиксированных значениях является уравнением прямой c1 x1 c2 x2 h . Построим многоугольник решений системы ограничений и график линейной функции c1 x1 c2 x2 0 . Тогда задачу линейного программирования можно сформулировать так: найти точку многоугольника решений, в которой прямая c1 x1 c2 x2 h опорная и функция Z при этом достигает минимума. Значения Z c1 x1 c2 x2 возрастают в направлении N c1 ,c2 , поэтому прямую c1x1 c2 x2 0 передвигаем параллельно самой себе в направлении N x2 B C A N E D Z Z x1 Z Прямая становится опорной в (∙) E и C . min значение функция принимает в (∙) E , координаты которой находим, решая систему уравнений прямых AE и ED. x2 N x1 Z x2 N x1 Z x2 N x1 Z x2 N x1 Z Неединственность оптимального решения. Неограниченный оптимум. Неединственность оптимального решения. Для некоторых задач линейного программирования может существовать несколько допустимых решений со значением целевой функции равной оптимальному значению задачи. В таких случаях все эти допустимые решения оптимальны и говорят, что задача линейного программирования имеет альтернативные оптимальные решения. Неограниченный оптимум. Для некоторых задач линейного программирования не существует оптимального решения, то есть для любого допустимого решения можно найти другое допустимое решение, которому соответствует лучшее значение целевой функции. В этом случае удаление от начала координат вызывает рост целевой функции и Z max если не существует конечного оптимума, говорят что задача линейного программирования имеет неограниченный оптимум. На практике такая ситуация не встречается, так как иначе можно было бы получить бесконечный доход при конечном запасе ресурсов. Если в практической задаче такое решение получено, это значит, что на этапе построения модели пропущено одно (или несколько) из ограничений. Симплексный метод решения ЗЛП. • На предприятии, в состав которого входят 4 производственных цеха, изготовляются два изделия. Производственные мощности цехов (в часах) в расчете на сутки соответственно составляют: 12, 8, 16, 12. Нормы времени, необходимого для изготовления единицы изделия №1 и №2 в соответствующих цехах, приведем в таблице. Цех 1 Изделия №1 №2 2 2 Производст. мощности 12 2 1 2 8 3 4 0 16 4 0 4 12 • Прибыль от продажи единицы изделия №1 составляет 2 тыс.ед, а единицы изделия №2 составляет 3 тыс.ед. Следует выбрать тот из возможных вариантов производственного плана, при котором обеспечивается max прибыль Z 2 x1 3x2 max 2 x1 2 x 2 12, x 2 x 8, 1 2 4 x1 16, 4 x 12, 2 x1 , x 2 0. Табличный симплексный метод Из свойств решений задачи ЛП следует, что существует такая угловая точка (вершина) многогранника решений, в которой целевая функция достигает своего наибольшего (наименьшего) значения. Каждой угловой точке многогранника решений соответствует опорный план, а каждый опорный план определяется системой m линейно независимых векторов, содержащихся в данной системе из n векторов A1 , A2 ,..., An. Для отыскания оптимального плана необходимо исследовать только опорные планы. Количество опорных планов, содержащихся в данной задаче, определим через m n C . Базис C б C1 C 2 C 3 ... C m A0 A1 A2 A3 ... Am C m1 ... Am 1 ... Cn An A1 C1 b1 1 0 0 ... 0 a1m1 ... a1n A2 C 2 b2 1 0 ... 0 a 2 m 1 ... a 2 n ... ... Am C m bm j Z j Cj 0 ... ... ... ... ... ... ... Z0 ... ... 0 0 0 ... 1 am m1 ... n am 0 0 0 m1 n 0 0 ... Условие оптимальности опорного плана. 1.При решении задачи ЛП, решаемой на отыскание минимального значения целевой функции, неравенства j 0 являются условием оптимальности Если j 0 для некоторых j, то можно перейти от исходного плана к новому опорному, при котором значение целевой функции будет меньше, чем предыдущее. Этот переход осуществляется исключением из исходного базиса какого-нибудь вектора и введением в базис нового. 2. При решении задачи ЛП, решаемой на отыскание максимального значения целевой функции, неравенства j 0 являются условием оптимальности Если j 0 для некоторых j, то можно перейти от исходного плана к новому опорному, при котором значение целевой функции будет больше, чем предыдущее. Этот переход осуществляется исключением из исходного базиса какого-нибудь вектора и введением в базис нового. Неединственность оптимума. Если в оптимальной таблице небазисный вектор имеет нулевую оценку, то задача ЛП будет иметь неединственное решение. Можно перейти к другой оптимальной таблице с другим решением, но значение целевой функции будет оставаться прежним. График целевой функции параллелен той прямой, на которой лежит точка min или max. Неограниченность оптимума. Говорят, что задача ЛП имеет неограниченный оптимум, если у нее нет конечного оптимального решения. В таком случае Z (для задачи максимизации), Z (для задачи минимизации). Вырожденность и зацикливание При рассмотрении симплекс-метода предполагаем, что все bi 0 . Если какое-то bi 0 , то такой план задачи в качестве базисной переменной содержит нулевое значения, т.к. план называется вырожденным. Правило для устранения зацикливания Если на каком-либо этапе расчета возникает неопределенность в выборе разрешающей строчки, т.е. 2 и более одинаковых min отношений, то следует выбрать ту строку, для которой отношение элементов следующего столбца к разрешающему является наименьшим. Если снова оказываются равными минимальные отношения, то выбирают следующий столбец и так до тех пор, пока разрешающая строка не определится однозначно. Двойственный симплекс-метод. • Двойственный симплекс-метод заключается в построении оптимального недопустимого плана с последующим преобразованием его в допустимый, не нарушая оптимальности Алгоритм двойственного симплекс-метода. • 1. Выбирают разрешающую строку по наибольшему по абсолютной величине отрицательному элементу столбца правых частей. • 2.Выбирают разрешающий столбец по наименьшему по абсолютной величине отношению элементов строки j к отрицательным элементам разрешающей строки • 3.Пересчитывают симплексную таблицу по правилам обычного симплекс-метода. • 4. Решение проверяют на оптимальность. Признаком получения допустимого оптимального решения является отсутствие в столбце правых частей отрицательных элементов. Замечания • 1.Если в разрешающей строке нет ни одного отрицательного элемента, задача неразрешима. • 2.Если ограничения задачи заданы неравенствами типа «≥», двойственный симплекс-метод позволяет избавиться от необходимости введения искусственных переменных. Метод искусственного базиса. Этот метод применяется в тех случаях, когда система ограничений содержит неравенство типа «≥» или равенство и при этом явно не видно базисных векторов Если ограничения задачи ЛП можно преобразовать к виду AX A0 , A0 0 , то всегда существует базис из единичных векторов. Существуют задачи ЛП, которые имеют решения, но не имеют единичных векторов и ограничения не приводятся к указанному виду. В этом случае для решения задач применяется метод искусственного базиса. • Найти Z c1 x1 c2 x2 ... cn xn min при ограничениях a11 x1 a12 x2 ... a1n xn b1 , a21 x1 a22 x2 ... a2 n xn b2 , ........................................ a x a x ... a x b , m2 2 mn n m m1 1 x j 0. • Где b i 0 и система ограничений не содержит единичную матрицу. Чтобы получить единичную матрицу к каждому равенству прибавим по одной переменной xni 0, i 1,...,m , которые назовем искусственными и рассмотрим расширенную задачу • Найти Z c1 x1 c2 x2 ... cn xn Mxn1 ... Mxnm min a11 x1 a12 x2 ... a1n xn xn1 b1 , a21 x1 a22 x2 ... a 2 n xn xn 2 b2 , ................................................ a x a x ... a x x b , m2 2 mn n nm m m1 1 x j 0. Величина M достаточно большое положительное число. • Найти Z c1 x1 c2 x2 ... cn xn max при ограничениях a11 x1 a12 x2 ... a1n xn b1 , a21 x1 a22 x2 ... a2 n xn b2 , ........................................ a x a x ... a x b , m2 2 mn n m m1 1 x j 0. • Найти Z c1 x1 c2 x2 ... cn xn Mxn1 ... Mxnm max a11 x1 a12 x2 ... a1n xn xn1 b1 , a21 x1 a22 x2 ... a2 n xn xn 2 b2 , ................................................ a x a x ... a x x b , m2 2 mn n nm m m1 1 x j 0. Величина M достаточно малое отрицательное число. Для отыскания оптимального плана исходной задачи используют теорему: если в оптимальном плане X x1 ; x2 ;...; xn ,0,...,0 расширенной задачи искусственные переменные xn i 0 ,то план X x1 ; x2 ;...; xn является оптимальным планом для исходной задачи. Применение симплекс-метода к расширенной задаче обеспечивает построение плана, в котором все искусственные переменные равны нулю. Если первоначальная задача не обладает планами, то оптимальное решение расширенной задачи содержит, по крайней мере, хотя бы одну положительную искусственную переменную. Двойственность в линейном программировании. С каждой ЗЛП тесно связана другая линейная задача, называемая двойственной. Экономическая интерпретация этих задач следующая: - исходная задача: сколько и какой продукции xi , необходимо произвести, чтобы при заданных стоимостях C j j 1,...,n единицы продукции и размерах имеющихся ресурсов bi i 1,...,m максимизировать выпуск продукции в стоимостном выражении; • - двойственная задача: какова должна быть цена единицы каждого из ресурсов, чтобы при заданных количествах ресурсов bi и величинах стоимости единицы продукции C j минимизировать общую стоимость затрат Первоначальный опорный план составляется, так же как и при решении ЗЛП симплекс-методом. Обозначим через xi j 1, n количество единиц j-й продукции. За единицу стоимости ресурсов примем единицу стоимости выпускаемой продукции. Обозначим через yi стоимость единицы i-го ресурса. Тогда стоимость всех затраченных ресурсов, идущих на изготовление единицы j-й продукции равна m aij yi i 1 a где ij - количество единиц i-го ресурса, которое идет на производства 1ед. j-ой продукции Стоимость затраченных ресурсов не может быть меньше стоимости окончательного продукта m aij yi C j , i 1 j 1,...,n Стоимость всех имеющихся ресурсов выразится величиной m bi yi i 1 Итак, двойственную задачу сформулируем следующим образом: найти вектор Y y1 , y2 , ... ym , который удовлетворяет ограничениям a11 y1 a21 y 2 a y a y 12 1 22 2 ... ... a1n y1 a2 n y 2 yi 0 ... am1 y m C1 ... am 2 y m C 2 ... ... ... ... am n y m C n 2 и вектор Y y1, y2 , ... ym доставляет минимальное значение линейной функции F b1 y1 b2 y2 ... bm ym Каждая из задач двойственной пары фактически является ЗЛП и может быть решена независимо одна от другой. Однако при определении симплексным методом оптимального плана одной из задач тем самым находится решение и другой задачи. Связь между оптимальными планами пары двойственных задач устанавливает Теорема двойственности: Если из пары двойственных задач одна обладает оптимальным планом, то и другая имеет решение, причем для экстремальных значений линейных функций выполняется соотношение max Z min F . Если линейная функция одной из задач неограниченна, то другая не имеет решения. Правила составления двойственных задач. 1. Целевая функция исходной задачи задается на максимум, целевая функция двойственной – на минимум. 2. Матрица A , составленная из коэффициентов (при неизвестных в системе ограничениях) при неизвестных в исходной T задаче, и матрица A получаются друг из друга транспонированием. 3. Число переменных (yi) в двойственной задаче равно числу ограничений исходной задачи. Число ограничений двойственной задачи равно числу переменных исходной задачи. 4. Коэффициентами при неизвестных в целевой функции двойственной задачи являются правые части системы ограничений исходной задачи. Правыми частями в системе ограничений двойственной задачи являются коэффициенты при неизвестных целевой функции исходной задачи. 5. Если переменная xi исходной задачи может принимать только положительные значения, то j – ое условие двойственной задачи является неравенством вида ≥. 6.Если переменная xi может принимать как положительные так и отрицательные значения, то j – ое ограничение у двойственной задачи представляет собой уравнение. 7. Если i - ое ограничение исходной задачи является неравенством вида «≤», то двойственной задачи может yi принимать только положительное значение. Если i - ое ограничение исходной задачи является равенством, то yi двойственной задачи может принимать как положительные, так и отрицательные значения. 8. Если исходная задача имеет ограничения вида «≤» и все x j 0 , то двойственная задача имеет ограничения «≥», и все yi 0 . Если в исходной задаче встречаются неравенства разного вида, то их приводят к виду «≤». Геометрическая интерпретация двойственной задачи. Если число переменных в прямой и двойственной задачах, образующих данную пару, равно двум, то, используя геометрическую интерпретацию ЗЛП, можно легко найти решение данной пары задач. При этом имеет место один из следующих трех взаимно исключающих друг друга случаев: 1.Обе задачи имеют планы 2.План имеет только одна задача 3.Для каждой задачи двойственной пары множество планов пусто Транспортная задача. Пусть однородный продукт, сосредоточенный в m отправления в количествах a1 , a2 ,..., am единиц, необходимо доставить в каждый из n пунктов назначения в количествах b1 , b2 ,..., bn единиц. Стоимость перевозки единицы продукта из i -го пункта отправления в j -й пункт назначения равна комбинаций i, j . cij и известна для всех Пусть xij– количество продукта, перевозимого по маршруту i, j . Задача заключается в определении таких величин xij для всех маршрутов , при которых стоимость i, j суммарная перевозок минимальна. Матрица планирования Поставщики Потребители B B2 1 c B3 ... c c ... A x11 x12 x13 .... ... ... ... 1 11 c m1 12 c m3 Am x m1 xm 2 xm 3 Потребности b b b 1 2 Bn c 13 c m2 Запасы 3 1n x1n ... ... ... c ... xm n b n a 1 ... mn am a b i j • Математическая модель транспортной задачи сводится к минимизации целевой функции, выражающей суммарные затраты на перевозку всего груза m n Z cij xij min i 1 j 1 Систему ограничений получаем из следующих условий задачи: n 1. Все грузы должны быть вывезены, т.е. xij 0; n j 1 xij ai ,i 1,...,m. m j 1 n x b 2. Все потребности должны быть удовлетворены, i 1 j 1 ij j т.е. m xij b j , j 1,..., n . i 1 Тогда математическая модель транспортной задачи имеет следующее.найти наименьшее значение линейной функции при ограничениях: m n Z cij xij i 1 j 1 n xij ai j 1 m xij b j i 1 x 0 . ij i 1, m j 1, n • Это есть задача ЛП с mn неизвестными. m n уравнениями и В рассмотренной модели предполагается, что суммарные запасы равны суммарным потребностям m n i 1 j 1 ai b j . Такая модель называется закрытой • Теорема. Любая транспортная задача, у которой m n ai b j , i 1 имеет решение. j 1 Построение первоначального опорного плана. При решении задач ЛП итерационный процесс по описанию оптимального плана начинают с определения опорного плана. • В общем случае система ограничений должна содержать m n 1 линейнонезависимых уравнений, значит невырожденный опорный план транспортной задачи содержит m n 1 положительных компонент или перевозок, т.е. в матрице xij mn значений компонент положительными являются только m n 1 , а остальные равны 0 Клетки в таблице матрицы планирования, в которых находятся отличные от 0 перевозки, называются занятыми, остальные незанятыми. Занятые клетки соответствуют базисным неизвестным и для невырожденного опорного плана их должно быть m+n-1. Опорность плана заключается в его ацикличности (это ситуация, при которой нельзя построить замкнутый многоугольник или цикл, все вершины которого будут лежать в занятых клетках). Циклом называется набор клеток, в котором две и только две соседние клетки расположены в одном столбце или в одной строке таблице, причем последняя клетка находится в той же строке или столбце, что и первая. Построение циклов начинают с какой-либо занятой клетки и переходят по столбцу (строке) к другой занятой клетке, в которой делают поворот под прямым углом и движутся по строке (столбцу) к следующей занятой клетке и т.д., пытаясь возвратиться к первоначальной клетке. Клетки, в которых происходит поворот под прямым углом, определяют вершины цикла. Если план транспортной задачи содержит более m+n-1 занятых клеток, он не является опорным, т.к. ему соответствует линейнозависимая система векторов. В этом случае в таблице всегда можно поставить замкнутый цикл, с помощью которого всегда уменьшают число занятых клеток до m+n-1. Если к занятым клеткам, определяющим опорный невырожденный план, а значит и цикличный, присоединить какую-либо незанятую клетку, то план становится не опорным, появляется единственный цикл, все вершины которого за исключением одной, лежат в занятых клетках. Метод Северо-западного угла. Метод минимальной стоимости (элемента). ПРИМЕР. В резерве трех железнодорожных станций A, B, C находятся соответственно 60, 80, 100 вагонов. Составить оптимальный план перегона этих вагонов к 4-ем пунктам погрузки хлеба, если пункту №1 необходимо 40 вагонов, №2 – 60, №3 – 80, №4 – 60. Стоимость перегонов одного вагона со станции A в в указанные пункты соответственно равны 1, 2, 3, 4 ден.ед., со станции B – 4, 3, 2, 0 ден.ед. и со станции C – 0, 2, 2, 1 ден.ед.. Поставщики Потребители 1 2 3 Запасы 4 А 1 2 3 4 60 В 4 3 2 0 80 С 0 2 2 1 100 Потребности 40 60 80 60 • Получили опорный план, т.к. m 3, n 4, m n 1 6 . X x11 40, x12 20, x22 40, x23 40, x33 40, x34 60 40 20 0 0 X 0 40 40 0 0 0 40 60 Общая стоимость составленного плана: Z=40·1+20·2+40·3+40·2+40·2+60·1= =40+40+120+80+80+60=420 Это не оптимальное решение. Если при составлении опорного плана учитывать стоимость перевозки единицы груза, то очевидно, что план будет ближе к оптимальному. Метода минимальной стоимости. Суть метода минимальной стоимости (элемента) заключается в том, что из всей таблицы стоимостей выбирают наименьшую, и в клетку, которая ему соответствует, помещают меньшее из чисел ai и bj . Затем из рассмотренного исключают либо строку, соответствующую поставщику, запасы которого полностью израсходованы, либо столбец, соответствующий потребителю, потребности которого полностью удовлетворены, либо и строку и столбец. Затем из оставшейся части опять выбирают наименьшую стоимость и процесс распределения запасов продолжают, пока все запасы не будут распределены, а потребности удовлетворены. Итак, опорный план трансформированной задачи построен, теперь надо из него получит оптимальный. Можно было получить оптимальный план используя симплексметод, но в нашем случае симплексная таблица будет содержать mn неизвестных, что приведет к громоздким вычислениям. Поэтому для нахождения оптимального плана транспортной задачи используют другие методы, самый распространенный из которых метод потенциалов. Метод потенциалов. • Если решение транспортной задачи является оптимальным, то ему соответствует система из m n чисел ui и v j удовлетворяющих условиям ui v j cij , xij 0 ui vi cij , xij 0 Для того чтобы план был оптимальным, необходимо выполнение следующих условий: 1) для каждой занятой клетки сумма потенциалов должна быть равно стоимости единицы перевозки, стоящей в этой клетке; 2) для каждой незанятой клетки сумма потенциалов должна быть меньше, либо равна стоимости единицы перевозки, стоящей в этой клетке. Если хотя бы одна незанятая клетка удовлетворяет условию (2), то опорный план не является оптимальным, и его улучшают, перемещая в клетку некоторое количество единиц груза). Проверяем условие оптимальности для незанятых клеток: если ui v j cij , то план не является оптимальным, и для каждой клетки, в которой не выполняется условие оптимальности, находим величину ui v j cij 0 и записываем в левый нижний угол. Выбор клетки в которую необходимо послать перевозку: транспортная задача линейного программирования решается на min линейной функции, поэтому алгоритм ее решения тот же, что и алгоритм симплекс-метода. Загрузке подлежит в первую очередь клетка, которой соответствует max ui v j cij Построение цикла и определение величины перераспределения груза: -отмечаем знаком « + » незанятую клетку, которую надо загрузить (знаки «-»и «+» чередуются); -затем находим min x ij , где xij– перевозки, стоящие в вершинах цикла, отмеченных знаком « - ». Величина min xij определяет сколько единиц груза над перераспределить. После перераспределения должно получиться m+n-1 занятых клеток. Если для какой-либо клетки условие оптимальности не выполняется, то можно улучшить решение двойственной задачи, а заодно и исходной задачи, сделав эту клетку занятой и перебросив груз по циклу. Для свободных клеток сумма потенциалов меньше, либо равна стоимости, следовательно в последней таблице должно быть получено оптимальное решение исходной транспортной задачи. Открытая модель транспортной задачи. • Транспортная задача называется открытой если m n i 1 j 1 ai b j • Для такой задачи может быть два случая: 1) суммарные запасы превышают суммарные потребности, т.е. m n i 1 j 1 ai b j ; 2) суммарные потребности превышают суммарные запасы, т.е. m n i 1 j 1 ai b j . • Линейная функция остается без изменения, изменяются только ограничения: Z cij xij i 1) j xij ai , xij b j , i xij 0. j 2) xij ai , j xij b j , i xij 0. 1) вводится фиктивный потребитель Bn1 , потребности которого bn1 ai b j ; i j 2) вводится фиктивный поставщик Am 1 , запасы которого am1 b j ai . j i Стоимость перевозки ед.груза в этих случаях полагают равными 0. Производственные функции. Производственные функции – это экономико-математическое выражение зависимости результативного показателя от обуславливающих его показателей факторов. Производственные функции делятся на 1. Однофакторные y f x , 2. Многофакторные y f x1 , x2 , ... xn , где y - результативный показатель, x - показатель фактор, f - вид зависимости. Производственные функции также делят на • статические (не учитывают фактор времени) • Динамические (включают фактор время) Наиболее распространенные ПФ: • Функция выпуска y=f(x) • Функция производственных затрат x=f(y) • Функция издержек • Функция спроса относительно цены q = q (p) • Функция цен спроса P= P(x) • Функция выручки U= U (x) • Функция предложения относительно цены S= S (p) • Функция цен предложения P= P(s) и т.д. Экономический смысл производной для ПФ. Если y = f(x) –ПФ выпуска, то производная характеризует предельную отдачу некоторого ресурса и показывает, сколько дополнительных единиц продукции приносит дополнительная единица затраченного ресурса. Это количество продукции носит название предельного продукта. 1. Скорость изменения величины продукта, получаемая на единицу затрат: 2. Предельные издержки: = 3. Предельный спрос= относительной цены: 4. Предельное предложение относительно цены: y dy lim x dx x 0 dK Lim К x dX x 0 dq Lim q p dp p 0 ds dp s Lim p p 0 Эластичность функции показывает процентное изменение функции, соответствующее изменению независимой переменной на 1%. • Изоквантой называют геометрическое место точек плоскости x1 , x2 для которых f x1 , x2 Yc • Предельной формой замещения ресурсов называется величина df / dx1 df / dx 2 Балансовые модели. Под балансовой моделью понимается система уравнений, каждое из которых выражает требования баланса между, производимым отдельными экономическими объектами, количеством продукции и совокупной потребностью в этой продукции. Балансовые модели широко применяются при экономико-математическом моделировании экономических систем и процессов. В основе создания этих моделей лежит балансовый метод, т.е. метод взаимного сопоставления имеющихся материальных, трудовых и финансовых ресурсов и потребностей в них. Межотраслевой баланс - это важный раздел системы национальных счетов, с помощью которого исследуются межотраслевые связи, сложные зависимости между промежуточным потреблением, конечным спросом и выпуском отраслей экономики. Схема межотраслевого баланса производства и распределения совокупного общественного продукта в стоимостном выражении Производящи е отрасли n Конечный продукт Валовой продукт 1 2 3 … 1 х11 х21 х23 … х1n Y1 X1 2 х21 х22 х23 … x2n Y2 X2 3 х31 х32 х33 … x3n Y3 X3 … … … … I … II … n xn1 xn2 хn3 хnn Yn Xn c1 c2 c3 cn v1 v2 v3 Чистый доход m1 m2 m3 X2 X3 Амортизация Оплата труда Валовой продукт Потребляющие отрасли X1 III vn IV mn … Xn Xi Xj i 1 j 1 n n Итог материальных затрат любой потребляющей отрасли и ее условно чистой продукции равен валовой продукции этой отрасли. Данный вывод можно записать в виде соотношения: Xj i 1 Xij Z n , где x j - валовый продукт потребляющей отрасли; ij- величины межотраслевых потоков продукции; z j - сумма амортизации, оплаты труда и чистого дохода j-ой отрасли. x Валовая продукция той или иной отрасли равна сумме материальных затрат потребляющих ее продукцию отраслей и конечной продукции данной отрасли: Xi i 1 Xij Yj n xi- валовый продукт производящих y отраслей, j- конечная продукция. Динамическое программирование. Динамическое программирование – это метод оптимизации многошаговых процессов, критерий эффективности которых обладает свойством аддитивности Задача. Инвестор выделяет средства в размере 5 тыс. ден. ед., которые должны быть распределены между тремя предприятиями. Требуется, используя принцип оптимальности Беллмана, построить план распределении инвестиции между предприятиями, обеспечивающий наибольшую общую прибыль, если каждое предприятие при инвестировании в него средств х тыс. ден. ед. приносит прибыль φi(x) тыс. ден. ед. ( i =1,2 и 3) по следующим данным Инвестирован ие средств (тыс. ден. ед.) Прибыль (тыс. ден. ед.) х φ1(x) φ2(x) φ3(x) 1 1,62 2,23 1,77 2 1,98 2,96 2.46 3 3,12 3,37 2,73 4 3,25 3,51 3,48 5 3,76 4,11 3,59 Решение Составим математическую модель задачи: • 1. Определение числа шагов. Разобьем решение задачи на шаги. Число шагов положим равным числу предприятий, в которые осуществляется инвестирование. • 2. Определение состояний системы. Введем переменную s- количество средств, имеющихся в наличии перед данным шагом и характеризующих состояние системы на каждом шаге. • 3. Выбор шаговых управлений. Управление на i-м (i =1,2 и 3) шаге хi - количество средств, инвестируемых в i-е предприятие. • 4. Определение выигрыша на i-м шаге. Выигрыш на i-м шаге—это прибыль, которую приносит i -е предприятие при инвестировании в него средств хi. x i i Если через выигрыш в целом обозначить общую прибыль W, то W 1 x1 2 x2 3 x3 • 5. Определение функции перехода в новое состояние. Если в наличии имеются средства в размере s тыс. ден ед. и в i-е предприятие инвестируется x тыс. ден. ед., то для дальнейшего инвестирования остается s -x тыс. ден. ед. и, следовательно, функция перехода в новое состояние имеет вид f1 s, x s x • 6. Составление функционального уравнения для последнего шага. На последнем i = 3 шаге оптимальное управление соответствует количеству средств, имеющихся и наличии. Это означает, что, сколько средств осталось, столько и надо вложить и последнее предприятие, а выигрыш будет равен доходу, приносимому последним предприятием: x3 s s,W3 s 3 s Составление основного функционального уравнения. Управление на каждом шаге надо выбирать так, чтобы оптимальной была сумма выигрышей на всех оставшихся до конца процесса шагах, включая выигрыш на данном шаге. Поэтому, если перед i -м шагом у инвестора остались средства в размере s тыс. ден. ед. то, вкладывая х тыс. ден. ед. в i-е предприятие, оно принесет доход φi(x), а оставшиеся s - х тыс. ден. ед., вложенные в остальные предприятия i + 1-го до последнего, составят выигрыш Wi 1( s x) Так как оптимальным является управление х, при котором сумма i x и Wi 1( s x)должна быть наибольшей, то основное функциональное уравнение примет вид 7. Wi s max i x Wi 1 s x x 5 После того как составлена модель, можно провести пошаговую оптимизацию, по результатам которой заполняется таблица s i=3 i=2 i=1 x3(s) W3(s) x2(s) W2(s) 1 1 1,77 1 2,23 2 2 2,46 1 4,00 3 3 2,73 2 4,73 4 4 3,48 2 5,42 5 5 3,59 3 5,83 x1(s) W1(s) 3 7,12 Таким образом, для получения наибольшей общей прибыли в размере 7,12 тыс. ден. ед. следует 3 тыс. ден. ед. вложить в первое предприятие и по 1 тыс. ден. ед. вложить во второе и третье предприятия.