Небесная сфера. Системы сферических координат
advertisement

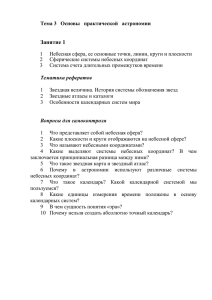
1 СОДЕРЖАНИЕ Небесная сфера. Системы сферических координат 2 Время и его измерение 9 Исправление высот светил 17 Идея астрономической обсервации. Круг равных высот и высотная 24 линия положения 5. Точность ВЛП и обсервованного места 33 6. Астрономическое определение поправки компаса 42 1. 2. 3. 4. НЕБЕСНАЯ СФЕРА. СИСТЕМЫ СФЕРИЧЕСКИХ КООРДИНАТ Небесной сферой называется сфера произвольного радиуса, на которую спроектированы небесные светила. В зависимости от решаемой задачи центр сферы может быть помещён в глаз наблюдателя, центр Земли или в другую точку. Чтобы ориентироваться на небесной сфере и иметь начало отсчёта для каких-либо координат, на небесной сфере необходимо провести круги, ориентированные по естественным направлениям. Природа задает два таких направления: отвесную линию (Z, и) и ось вращения Земли (PN, Ps)- С отвесной линией связан горизонт и горизонтная система координат, а с осью вращения Земли - небесный экватор и экваториальные системы координат. рассмотрим круги небесной сферы, связанные с этими двумя направления на рис 1.1. 2 Истинным горизонтом называется большой круг небесной сферы, плоскость которого перпендикулярна отвесной линии. Истинный горизонт делит небесную сферу на две части - надгоризонтную и подгоризонтную. На рис. 1.1 истинный горизонт проходит через точки N, Е, S, W. Вертикалом называется большой круг небесной сферы, проходящий через зенит (Z) и надир (п). Вертикалов можно провести бесчисленное множество. Если вертикал проходит через какое-либо светило, он называется вертикалом данного светила. На рис. 1.1 показан вертикал светила σ . Альмукантаратом называется малый круг небесной сферы, плоскость которого параллельна плоскости истинного горизонта. Если альмукантарат проходит через какое-либо светило, он называется альмукантаратом данного светила. На рис. 1.1 показан альмукантарат аа' светила σ . Перейдём теперь к системе кругов, ориентирующихся на ось вращения Земли. Осью мира называется прямая, проходящая через центр небесной сферы параллельно оси вращения Земли. В частном случае, когда центр небесной сферы помещён в центр Земли, ось мира совпадает с осью вращения Земли. Вокруг оси мира происходит кажущееся вращение небесной сферы в течение суток. Угол между осью мира и плоскостью истинного горизонта равен широте места φ . Полюсами мира называются точки пересечения оси мира с небесной сферой. Полюс, расположенный в надгоризонтной части сферы, называется повышенным полюсом, противоположный - пониженным. Повышенный полюс одноименен с широтой. На рис. 1.1 небесная сфера изображена для широты, примерно, 60°N. Небесным экватором называется большой круг небесной сферы, плоскость которого перпендикулярна оси мира. Небесный экватор делит сферу на две части - северную и южную. Небесным меридианом называется большой круг небесной сферы, проходящий через полюса мира. Меридианов можно провести бесчисленное множество. Если меридиан проходит через какое-либо светило, он называется меридианом данного светила. На рис. 1.1 показан меридиан светила и небесный экватор, проходящий через точки Q, W, Q', Е. 3 Небесной (или суточной) параллелью называется малый круг небесной сферы, плоскость которого параллельна плоскости небесного экватора. По этой параллели происходит видимое суточное перемещение светила. Если параллель проходит через какое-либо светило, она называется параллелью данного светила. На рис. 1.1 показана параллель ев' светила σ . Меридианом наблюдателя называется большой круг небесной сферы, проходящий через зенит, надир и полюса мира. На рис. 1.1 небесная сфера показана в проекции на плоскость меридиана наблюдателя. Ось мира делит меридиан наблюдателя на две части: полуденную, содержащую зенит (PN, Z, Q, S, Ps), и полуночную, содержащую надир (PN, N, Q', n,Ps). Истинный горизонт пересекается с меридианом наблюдателя в точках N и S, а с небесным экватором - в точках Е и W. Эти точки называются главными точками горизонта или странами света. Точка горизонта под повышенным полюсом мира всегда одноименна с широтой. Первым вертикалом называется вертикал, проходящий через точки Е и W. Его плоскость перпендикулярна плоскости меридиана наблюдателя светил на небесной сфере. 1.1 Горизонтная система координат Эта система ориентирована на отвесную линию. Основными кругами, от которых идет отсчет координат, являются истинный горизонт и меридиан наблюдателя. Горизонтная система показана на рис. 1.2. Координатами являются высота h и азимут А. 4 Высотой называется угол при центре сферы между плоскостью истинного горизонта и направлением на светило. Высота измеряется дугой вертикала светила от истинного горизонта до центра светила в пределах от 0° до 90°. Высоте в подгоризонтной части присваивается знак минус и она называется снижением. Величина z = 90°- h называется зенитным расстоянием. Азимутом называется сферический угол при зените между меридианом наблюдателя и вертикалом светила. Азимут измеряется дугой истинного горизонта от меридиана наблюдателя до вертикала светила. Существуют три системы счета азимута: круговой, полукруговой и четвертной. Круговой измеряется от точки N по часовой стрелке в пределах от 0° до 360° и имеет другое название - истинный пеленг. Полукруговой азимут измеряется от полуночной части меридиана наблюдателя в сторону W или Е до вертикала светила, в пределах от 0° до 180°. Первая буква наименования полукругового азимута всегда одноименна с широтой. Четвертной азимут измеряется от N или S в сторону W или Е до вертикала светила в пределах от 0° до 90°. На рис. 1.2 показан четвертной азимут. Преимуществом горизонтной системы является её наглядность, а также наличие приборов для измерения координат: пеленгатор компаса для измерения азимутов и секстан для измерения высот. Недостатком системы является постоянное изменение координат вследствие суточного вращения Земли. 5 1.2 Первая экваториальная система координат Эта система ориентирована на ось мира. Основными кругами является небесный экватор и меридиан наблюдателя. Основные координаты: Склонение и часовой угол. Склонением(δ) называется угол при центре сферы между плоскостью небесного экватора и направлением на светило. Склонение измеряется дугой меридиана светила от небесного экватора до центра светила в пределах от 0° до 90° и имеет наименование N или S. На рис. 1.3 показано светило с северным склонением. Величина Δ =90°-δ называется полярным дополнением. Часовым углом называется сферический угол при повышенном полюсе мира между полуденной частью меридиана наблюдателя и меридианом светила. Часовой угол измеряется дугой небесного экватора от полуденной части меридиана наблюдателя до меридиана светила. Существуют две системы счёта часовых углов: А.) обыкновенный или западный часовой угол и Б.)практический часовой угол. Обыкновенный часовой угол измеряется от полуденной части меридиана наблюдателя в сторону W до меридиана светила в пределах от 0° до 360°. Практический часовой угол 6 измеряется от полуденной части меридиана наблюдателя в сторону Е или W до меридиана светила в пределах от 0° до 180°. На рис. 1.3 показан обыкновенный часовой угол. Заметим, что обыкновенный часовой угол, если он не превышает 180°, одновременно является и практическим. Обыкновенный часовой угол наименования не имеет, так как по определению измеряется в одну, западную сторону, а практический имеет наименование W ИЛИ E. Часовые углы и склонения для Солнца, Луны и четырех навигационных планет: Венеры, Марса, Юпитера и Сатурна даны на каждый час в Морском астрономическом ежегоднике (МАЕ ). 1.3 Вторая экваториальная система координат Эта система также ориентирована на ось мира. Основными её кругами являются небесный экватор и меридиан точки Овна. Точка Овна (γ) — это точка на небесном экваторе, в которой Солнце, перемещаясь в течение года по небесной сфере среди звезд, оказывается 21 марта. Эту точку также называют точкой весеннего равноденствия. Координатами во второй экваториальной системе, которая показана на рис. 1.3, являются склонение δ и прямое восхождение а. Склонение является общей координатой для первой и второй экваториальных систем. Прямым восхождением называется дуга небесного экватора, заключённая между меридианами точки Овна и светила. Прямое восхождение измеряется дугой небесного экватора от точки Овна навстречу западным часовым углам до меридиана светила в пределах от 0° до 360°. Часто используют также дополнение прямого восхождения до 360°, которое называют звёздным дополнением: τ =360° -а Точка Овна участвует вместе со всеми светилами в суточном вращении небесной сферы. Поэтому прямое восхождение, как и склонение, не зависит от вращения Земли. Это обстоятельство позволяет публиковать все каталоги звёзд в этой системе координат. Звёздные дополнения и склонения 160 навигационных звёзд даны в МАЕ. В этой же системе координат нанесены звёзды на звёздный глобус. 7 1.4. ПАРАЛЛАКТИЧЕСКИЙ ТРЕУГОЛЬНИК СВЕТИЛА И ЕГО РЕШЕНИЕ Параллактическим треугольником называется сферический треугольник, вершинами которого являются: пов ыш енн ый пол юс ми ра,з ени ти све ти ло. На рис. 1.4 видно, что параллактический треугольник образуется дугами меридиана наблюдателя, меридиана светила и вертикала светила. Его элементами являются стороны: зенитное расстояние, полярное дополнение и дополнение широты до 90°, а также углы: азимут при зените, часовой угол при повышенном полюсе мира и параллактический угол при светиле, из-за которого треугольник и называется параллактическим. Отдельно треугольник и его элементы показаны на рис. 1.5. Решить треугольник - означает по заданным элементам найти другие. Для однозначного решения должны быть заданы три элемента. В зависимости от решаемой задачи могут быть заданы различные элементы. В основной же задаче, в которой используется параллактический треугольник, заданы: φ, δ и tм , а надо найти h и А. Треугольник решается на основании теорем сферической тригонометрии, которые в данном случае приводят к формулам: 8 Решение по этим формулам производится с помощью микрокалькулятора и по таблицам. Результат решения для высоты записывается с точностью до 0,'1, а для азимута - с точностью до 0,1°. Необходимо помнить, что знаки аргументов в формулах (1.1) и (1.2) следующие: φ и t всегда имеют знак «+», а δ «+», когда одноимённо с φ и «-», если разноимённо. По формуле (1.2) азимут получается в полукруговом счете. Его первая буква одноимённа с широтой, а вторая - с практическим часовым углом. Если азимут получился отрицательным, к нему добавляют 180°, а после этого присваивают наименование. Полученный полукруговой азимут необходимо перевести в круговой. Пример 1.1. Решение. Вводим в микрокалькулятор φ и t с плюсом, а 8 —с минусом. После вычислений без промежуточных записей получаем: Пример 1.2. Решение. Все- аргументы вводим с плюсом. После вычислений получаем: Чтобы облегчить перевод азимута из одной системы в другую, полезно схематично изобразить картушку компаса, которая оцифрована в круговом счёте, и на ней, отложив заданный азимут, переводить его в другой счёт. 9 ВРЕМЯ И ЕГО ИЗМЕРЕНИЕ В основу измерения времени положены циклические, повторяющиеся процессы. В астрономии такими процессами являются обращение Земли вокруг Солнца (год), Луны вокруг Земли (месяц) и Земли вокруг своей оси (сутки). Земля совершает один оборот вокруг Солнца за 365,2422 суток, а Луна вокруг Земли за 29,53 суток. Такими большими единицами можно измерять только очень большие отрезки времени. Поэтому в основу измерения времени положен период обращения Земли вокруг своей оси — сутки и их дробные части: час, минута, секунда. 1.2 Звёздное время Как любая другая шкала, шкала времени должна иметь начало отсчёта. За начало отсчёта удобно принять верхнюю кульминацию какой-либо неподвижной точки. За такую неподвижную точку принимают точку Овна. Промежуток времени между двумя последовательными верхними кульминациями точки Овна на одном и том же меридиане называется звёздными сутками. Звёздные сутки делятся на 24 звёздных часа, звёздный час делится на 60 звёздных минут, звёздная минута - на 60 звёздных секунд. Период времени между верхней кульминацией точки Овна и данным физическим моментом называется звёздным временем. Звёздное время измеряется в звёздных часах, минутах и секундах и не имеет даты. После кульминации точка Овна изменяет свой часовой угол строго пропорционально времени. За 24 звёздных часа часовой угол изменяется на 360°. Поэтому звёздное время измеряется часовым углом точки Овна и может быть выражено и во временной, и в градусной мере. Например, звёздное время 5 часов или 75°. Обозначается звёздное время буквой S. Таким образом, S = t^. Звёздное время (часовой угол точки Овна) на каждый час гринвичского времени дано в МАЕ. Звёздное время используется как промежуточный аргумент во многих задачах мореходной астрономии. По нему организовано наблюдение звёзд на астрономических обсерваториях, но наша жизнь организована на основе смены дня и ночи. Поэтому в основу измерения времени положено не звёздное, а солнечное время. 2.2Среднее солнечное время 10 Исторически сложилось так, что за начало отсчета принята не верхняя, а нижняя кульминация Солнца (полночь). Если бы кажущееся движение Солнца в течение года происходило равномерно, то продолжительность солнечных суток была бы одинаковой. Но Земля по орбите вращается неравномерно, следовательно, и кажущееся движение Солнца среди звёзд также неравномерно. Зимой оно быстрее, летом - медленнее. Поэтому продолжительность суток зимой и летом разная. Чтобы избежать этого, за начальную точку отсчета принимают нижнюю кульминацию, так называемого, среднего Солнца. Среднее Солнце -это некая фиктивная точка на небесном экваторе, которая, как и истинное Солнце, проходит через точку Овна через каждые 365,2422 суток, перемещаясь при этом по небесному экватору на 59,14' в сутки относительно точки Овна. Этим равномерным перемещением достигается постоянство средних солнечных суток в течение года. Промежуток времени между двумя последовательными кульминациями среднего Солнца на данном меридиане называется средними солнечными сутками. Средние солнечные сутки делятся на 24 средних солнечных часа, 1 час делится на 60 средних солнечных минут, 1 средняя минута на 60 средних солнечных секунд. Промежуток времени между нижней кульминацией среднего Солнца и данным моментом называется средним солнечным временем. Среднее солнечное время измеряется в средних солнечных часах, минутах и секундах. В дальнейшем слово «солнечное» будем опускать и под средним временем будем подразумевать среднее солнечное время и обозначать его буквой Т. Таким образом, шкалы всех измерителей времени оцифрованы в единицах среднего времени. Отсчёт времени начинается с момента нижней кульминации среднего Солнца, т.е. с момента прохождения среднего Солнца меридиана наблюдателя. Следовательно, на каждом меридиане свой отсчёт времени. Время на данном меридиане называется местным временем (Тм). Чтобы каким-то образом согласовать часы, их устанавливают по какому-либо одному меридиану. Исторически сложилось так, что за такой меридиан принят меридиан Гринвичской обсерватории. Время на гринвичском меридиане называется гринвичским средним или всемирным временем. Гринвичское и местное время связаны соотношением: 11 При переводе времени с одного меридиана на другой всегда следует руководствоваться следующим правилом: «к востоку времени больше». На гринвичское среднее время рассчитаны эфемериды светил в МАЕ по нему отсчитывается время в спутниковых системах. На судне Гринвичское время показывает хронометр или его можно получить с экрана спутникового приёмоиндикатора. Несмотря на удобство пользования единым временем, в повседневной жизни желательно пользоваться временем более близким к местному. Поэтому весь земной шар был разбит меридианами на 24 пояса, в которых все часы были установлены по времени центрального меридиана каждого пояса. Среднее время центрального для данного пояса меридиана, по которому установлены все часы, называется поясным временем. Оно обозначается ТП. Ширина пояса равна 15°. Местное время от поясного может отличаться не более, чем на 0,5 часа. Сказанное справедливо только на море. На суше границы поясов проходят по рекам, административным и государственным границам. Поэтому реальная ширина пояса может быть и меньше, и больше 15°. Существуют специальные карты часовых поясов. Время двух соседних поясов отличается на 1 час по правилу «к востоку времени больше». Поясу, в котором центральным меридианом является гринвичский, присваивается нулевой номер. Его границы 7,5°Е и 7,5° W. Первый восточный пояс имеет границы 7,5°Е и 22,5°Е . Его центральный меридиан - 15°Е. И, так далее, до пояса №11. Аналогично идёт оцифровка для западных часовых поясов. Двенадцатый пояс является общим. Если судно находится в восточном полушарии, он считается восточным (Е), если в западном - считается западным (W). Чтобы определить номер пояса, надо долготу разделить на 15 и округлить в сторону целого. Например, λ= 127°20' Е, № = 8 Е; λ = 127°40' W; № = 9W. Гринвичское и поясное время связаны соотношениями: Т п = Т гp ±№ Е w ( 1.8) 12 Т гp = Т п ±№ w Е (1.9) С целью экономии электроэнергии во многих странах, в том числе и на Украине, в летний период поясное время увеличивают на 1 час. Такое время называется летним временем. В России декретом Совнаркома в 1930 году было решено оставить летнее время круглый год. Такое время, увеличенное на 1 час, называется декретным временем и обозначается ТД. Таким образом, Тд = Тп+1. С 1980 года в России, помимо декретного, на летний период стали добавлять ещё один час. В некоторых странах, например, в Индии, Иране, Индонезии и др., принято время, отличающееся от поясного на 30 минут. В других странах, например, в Либерии, Гвиане и др., вместо поясного используется местное время какого-либо пункта. Такое время, отличающееся от поясного на произвольный период, называется стандартным временем. На картах часовых поясов указано стандартное время в таких странах. ALRS-V II 2.3 Судовое время Время пояса, по которому установлены стрелки судовых часов с точностью до 1 минуты, называется судовым временем. Оно обозначается Тс. В море Тс- это округлённое до минут ТП. Однако, в порту, судовые часы могут быть установлены и по летнему, и по стандартному времени. Гринвичское и судовое время связаны соотношениями:(1.10) и (1.11). Тс=Тгр. ± № Е w (1.10) Тгр.= Тс ± № w Е (1.11) Часто возникает необходимость по известному местному времени найти судовое. Такая задача решается «через Гринвич»: сначала долготой уходят на Гринвич, а затем номером пояса возвращаются на центральный меридиан пояса, т.е. на Тс На рис. 1.13 показана схема такого перехода. : 13 Решения на задач перевод времен, включая и простые, по формулам (1.6)- (1.11) необходимо, во избежание ошибок, выполнять в стандартных схемах, как это показано в примере 1.3. Пример 1.3. В МАЕ 2002 года на 2 сентября указано местное время верхней кульминации Солнца 1Г 59 м . Судно находится на долготе λ = 85°34' Е. Рассчитать судовое время верхней кульминации Солнца. Решение. С помощью прил. 13 к учебнику переводим градусную меру долготы во временную: λ = 5Ч 42м Е. Рассчитываем номер пояса: № = 6Е. Дальнейшее решение выполняем в стандартной схеме. Аналогично решается и обратная задача перехода от Тс к Тм, только все знаки в схеме решения меняются на обратные. 14 Если задано время в каком-либо порту, а надо узнать время в другом порту, эта задача также решается «через Гринвич». С помощью карты часовых поясов узнают поправки для перехода на Гринвич для одного и другого порта, а затем одной поправкой уходят на Гринвич, а другой - с Гринвича в нужный порт. В рейсе при переходе из одного часового пояса в другой стрелки судовых часов переводятся на один час вперёд или назад. Делается это обычно на вахте второго помощника капитана. При плавании восточными курсами в 00 часов стрелки переводятся на 01 час, а при плавании западными курсами в 01 час стрелки судовых часов переводятся на 00 часов. При этом делается соответствующая запись в судовом журнале. В любой момент гринвичского времени в 12 восточном поясе времени на 12 часов больше, а в 12 западном поясе на 12 часов меньше, чем на Гринвиче. Таким образом, независимо от того, в восточном или западном двенадцатом часовом поясе находится судно, судовое время одно и то же, но даты разные. Линия смены дат или демаркационная линия проходит по 180° меридиану, отклоняясь в некоторых местах на суше или вблизи островов. Принято смену дат производить не в момент пересечения демаркационной линии, а с нуля часов следующих суток. Делается это в таком порядке. В момент пересечения демаркационной линии делается отметка на карте и соответствующая запись в судовом журнале. После пересечения демаркационной линии наименование долгот меняется на противоположное. В конце суток, в 24 часа второй помощник, приняв вахту и делая запись в судовом журнале, меняет дату следующим образом: при следовании восточными курсами дату повторяет, при следовании западными курсами дату пропускает. Например, судно следует восточными курсами 23 мая и пересекает демаркационную линию. В 24 часа второй помощник начинает следующие сутки: 23 мая, 0ч. Если судно следует 23 мая западными курсами, то следующие сутки второй помощник записывает: 25 мая, 0ч. 2.4 Служба времени на судне Службой времени на судне занимается второй помощник капитана. В его обязанности входит: - ежедневный завод хронометра в 8 часов по судовому времени, определение его поправки и суточного хода; - еженедельный по понедельникам завод всех судовых часов; 15 - ежедневное составление штурманского бюллетеня, включающего данные о времени восхода и захода Солнца, кульминации Солнца, поправке хронометра, высоте глаза и др. - отметка на лентах самописцев времени подхода к портам, узкостям, районам с ограниченной - видимостью и т.п.; - сличение перед выходом из порта, перед началом маневрирования, перед подходом к узкостям и т.п. судовых часов в штурманской рубке и МКО; - перевод стрелок судовых часов при переходе в другой часовой пояс; - смена лент самописцев (курсографа, барографа, термографа); - замена неисправных секундомеров, часов и хронометра; - ведение расчетов эксплуатационного времени. 2.5 Основная формула времени Рассмотрим проекцию небесной сферы на плоскость небесного экватора (рис. 1.14). На сфере показана точка Овна (Y) и среднее Солнце , которые всегда находятся на небесном экваторе, а также истинное Солнце и звезда. На рисунке показаны часовые углы и прямые восхождения светил, а также часовой угол точки Овна, который является звездным временем Дуга небесного экватора между меридианами истинного 16 и среднего Солнца - уравнение времени. Уравнение времени показывает, на сколько истинное время отличается от среднего. Значение уравнения времени на каждые сутки приводится в МАЕ. - Непосредственно на чертеже видно, что часовой угол и прямое восхождение каждого светила в сумме дают звёздное время. Таким образом, Это уравнение называется основной формулой времени. Основная формула времени очень важна. Она связывает координаты первой и второй экваториальной системы и используется при расчёте часовых углов звёзд. Если в формуле (1.12) прямое восхождение заменить на 360°-Т, получим формулу для вычисления часовых углов звёзд: Из формулы (1.12) следует, что в момент верхней кульминации светила его прямое восхождение равно звёздному времени. Это обстоятельство используется на астрономических обсерваториях при определении прямых восхождений светил. В момент верхней кульминации замечается звёздное время и после исправления всеми поправками получают прямое восхождение светила. 17 ИСПРАВЛЕНИЕ ВЫСОТ СВЕТИЛ При определении места судна по небесным светилам сравниваются две высоты одного и того же светила. Одна, соответствующая счислимой точке, рассчитывается по формуле (1.1) и экваториальными координатами светила приведена к центру Земли. Другая - обсервованная, получается измерением секстаном и отнесена к глазу наблюдателя, находящегося на мостике судна. Поэтому обсервованную высоту также надо привести к центру Земли. Кроме того, необходимо учесть влияния астрономической и земной рефракции, наклонение видимого горизонта, полудиаметр, если он у светила есть. 3.1 Исправление отсчета секстана Отсчет секстана, исправленный поправкой индекса i и инструментальной поправкой s, выбранной из паспорта секстана, обозначается h' и называется измеренной высотой: Рассмотрим влияние перечисленных выше причин на обсервованные высоты с помощью рис. 2.14. На этом рисунке глаз наблюдателя расположен в точке А на высоте е над уровнем моря. Истинное положение звезды на небесной сфере - σ, а видимое, смещённое астрономической рефракцией - σ ' . Аналогично показаны истинное и видимое положения Солнца. Истинный горизонт показан прямой ГИ Ги', а видимый - усматривается из-за земной рефракции по направлениям АГВ и АГв'. Центр Земли обозначен точкой О. На чертеже показаны следующие углы: р - астрономическая рефракция; d- наклонение горизонта; р - параллакс Солнца; R - полудиаметр Солнца; h'- измеренная высота звезды и нижнего края Солнца; hB - видимая высота звезды и нижнего края Солнца; hи - истинная высота звезды и нижнего края Солнца; h0 - обсервованная высота. Переход от измеренной высоты к обсервованной называется исправлением высот. Вобщем случае обсервованная высота получается по формуле: 18 В таком виде формула применяется для исправления высот Солнца и Луны. Для Марса и Венеры отсутствует полудиаметр, а для остальных всех осталь светил (звезд, Юпитера и Сатурна) и параллакс. Рассмотрим подробнее составляющие формулы (2.12). Поправка индекса секстана i - определяется перед началом каждого наблюдения. Инструментальная поправка S приводится в паспорте секстана. Откуда она выбирается по аргументу ОС. 3.2 Исправление измеренной высоты Наклонение горизонта d, как видно из рис. 2.14, зависит от высоты глаза е и от кривизны луча, приходящего от горизонта в глаз наблюдателя. Кривизна луча зависит от распределения плотности в приземных слоях воздуха. Для среднестатистических условий наблюдения принимают следующую зависимость наклонения горизонта от высоты глаза е: d = 1,76 e 2.13 Таблицы, составленные по этой формуле, есть в МАЕ, МТ-2000, ВАС-58, ТВА-57 и английских ежегодниках. Таблица эта без интерполяционная, т.е. одно и то же значение d соответствует некоторому интервалу е. 19 наблюдателя выражена в метрах. В английских ежегодниках е используется как в метрах, так и в футах. 3.3 Исправление видимой высоты - За рефракцию Астрономическая рефракция р с достаточной для судовождения точностью может быть представлена ( 2.14 ) принимают некоторые средние значения в=760 мм и Т°=+10°С, формулавформулой: подставляют в формулу ( 2.14 ) и получают, так называемую, нормальную рефракцию: ( 2.15) Значения нормальной рефракции по аргументу hB приводятся во всех перечисленных выше астрономических пособиях. Нормальной рефракцией можно пользоваться в интервале высот от 10° до 90°. На высотах ниже 10° влияние температуры и давления начинает существенно сказываться и нормальную рефракцию необходимо подправлять поправками за температуру Δht и давление ΔhB, которые приводятся в таблицах перечисленных выше астрономических пособий. Таким образом, для светил с высотами более 10° р = ро, а с высотами менее 10° р =po + Δh, +ΔhB. Следует заметить, что в NAUTICAL ALMANAC температура и давление учитываются одной общей поправкой. - За радиус Полудиаметр Солнца и Луны зависит от их физических радиусов и расстояния до них. Значения полудиаметров Солнца и Луны на 0 часов гринвичского времени каждых суток приводятся в МАЕ. Для ориентировки на небе полезно помнить, что угловой диаметр Солнца или Луны составляет около 0,5°. - За параллакс Параллакс р - это угол, под которым со светила усматривается расстояние АО (см. рис. 2.14). Пренебрегая высотой глаза, можно принять это расстояние равным радиусу Земли. Из треугольника SAO можно записать: 20 ( 2.16 ) Отношение АО к OS- радиуса Земли к расстоянию до светила - называется экваториальным горизонтальным параллаксом ро. С учетом этого формулу (2.16) можно записать так: 2.17.) ( Экваториальный горизонтальный параллакс для Луны и навигационных планет дается в МАЕ. Для Венеры и Марса составлена таблица в МАЕ и МТ-2000, в которой по ро и hB можно выбрать р. Это же значение можно получить по формуле (2.17). Практическое исправление высот сводится к заполнению стандартных схем. Эти схемы для различных светил различаются только последней поправкой. Ниже приведены стандартные схемы для исправления высот звёзд, Венеры и Марса, Солнца, Луны. Измеренные высоты звёзд исправляются поправками за наклонение горизонта и астрономическую рефракцию. В схеме указаны страницы в МАЕ 2002, откуда можно выбрать соответствующую поправку. Измеренные высоты Юпитера и Сатурна исправляются так же, как и звёзд. Высоты Венеры и Марса, помимо наклонения горизонта и астрономической рефракции, исправляются еще и поправкой за параллакс. Для этого сначала из МАЕ на дату наблюдения выбирается р0, а затем из таблицы на стр. 287 МАЕ выбирается р (дополнительная поправка). Для удобства записи её обычно объединяют с рефракцией. При этом следует помнить, что рефракция всегда имеет знак минус, параллакс - плюс. Значения ро можно выбрать из прил. 4 к учебнику. Измеренные высоты Солнца можно исправлять раздельными поправками в соответствии с формулой (2.12). В МАЕ на стр.284 для Солнца приведена таблица 21 поправки за рефракцию и параллакс (р+р ). Остается учесть только полудиаметр (R), значение которого можно выбрать либо на дату наблюдения, либо на стр. 287. Однако, проще это делать с помощью общей поправки высоты Солнца, которая приводится в NAUTICAL ALMANAC. Общая поправка включает в себя астрономическую рефракцию, параллакс и полудиаметр. Аргументами для входа в таблицу служат: время года, верхний или нижний край Солнца и hB. Для исправления высот Луны также составлены таблицы на стр.286 в МАЕ. Видимая высота Луны исправляется основной (Δh ) и дополнительной (доп) поправками. Аргументом для входа в основную таблицу служит hB, а в дополнительную - край Луны, hB и р0 (экваториальный горизонтальный параллакс Луны). Как уже говорилось, параллакс Луны изменяется быстро. Поэтому указанный на 0 часов гринвичского времени в МАЕ параллакс необходимо проинтерполировать на Тгр. наблюдений. Солнце и Луна могут наблюдаться на высотах менее 10°. Следует помнить, что в этом случае надо измерять температуру наружного воздуха и давление. Если они отличаются от нормальных, необходимо учитывать соответствующие поправки, которые даны на стр.285 МАЕ. В частном случае, если высота светила измерялась не над горизонтом, а над береговой чертой или над ватерлинией близко стоящего судна, вместо наклонения горизонта d используется наклонение зрительного луча dn которое приводится в МТ-2000 и в BROWN's NAUTICAL ALMANAC по высоте глаза и дистанции до береговой черты или до ватерлинии судна. Все остальные поправки и сама схема вычислений остаются прежними. При исправлении высот, измеренных через зенит, видимая высота вычисляется по формуле: видимая высота исправляется как обычно. 22 3.4 Приведение высот светил к одному зениту Приведение высот к одному зениту выполняется в двух случаях: при определении точности измерения высот на движущемся судне и при определении места судна по высотам нескольких светил. При определении места судна интервалы времени удобнее измерять в минутах по формуле: где ΔТ м- интервал времени между измерениями высот в минутах; V— скорость судна в узлах; А-ИК - курсовой угол светила. Поправка Δhz, подсчитанная с помощью микрокалькулятора по формуле (2.18), может иметь знак плюс или минус и предполагает приведение более ранних измерений к последующим. Если необходимо привести высоту к предыдущему измерению, знак, полученный по формуле, меняется на обратный. Если в правой части формулы исключить ΔТм, оставшееся выражение показывает изменение высоты за одну минуту. По этому выражению составлена таблица на стр.285 в МАЕ и аналогичные таблицы в других пособиях. Аргументами в этих таблицах служат скорость судна и курсовой угол светила. Знаки, указанные в таблице, также означают приведение к последующему зениту. Для приведения к предыдущему зениту табличный знак меняют на обратный. Пример На судне, следующем ИК=240° со скоростью 17 узлов измерены высоты трех звезд: Ткр1= 5ч17м06с; h01 = 35°48,6'; Тхр2=5ч21м19с; hO2= 40°09,2'; Тхр3 = 5ч27м01с; h03 = 56°21,0'. Найти приведённые обсервованные высоты пр h0, если известны азимуты звёзд: А1=3510, А2=\ 19°, А3,=240°. Приведение выполнить ко второму зениту. Решение. Составляем стандартную схему вычислений. В неё заносим исходные высоты. Так как приведение ко второму зениту, рассчитываем разность моментов между первым и вторым и между третьим и вторым измерением в минутах и записываем в схему вычислений. Рассчитываем курсовые углы А—ИК первой и третьей звезд. Если азимут окажется меньше истинного курса, к нему добавляют 360°. Дальнейшее решение можно выполнить на калькуляторе по формуле (2.18) или по указанной выше таблице. Подставляя значения ΔТ м и А-ИК в формулу (2.18), получим для первой звезды Δhz =-0,4', для третьей Δh z= + 1,6'. Так как высота третьей звезды приводится к предыдущему зениту, меняем знак поправки на обратный и записываем в схему вычислений. После алгебраического сложения получаем приведённые высоты первой и третьей звёзд. Высота второй звезды остается без изменений. Если решение производится по таблице, то по скорости, и курсовому углу выбирается приведение за одну минуту Δhz1 и записывается в схему вычислений. Затем, умножая эту величину на д 7 м, получают Δhz- Выбранные значения из таблицы (прил. 4) -0,10' и 23 +0,28'. Так как высота третьей звезды приводится к предыдущему зениту, табличный знак меняется на обратный и в схему вычислений записываем -0,28'. Затем, умножая hZ\ на ΔТ= 7м, получаем Δhz1 и Δhzз- Складывая алгебраически h о и Δhz , получаем приведённые высоты. На практике приведение высот делается к тому зениту, для которого записывается Тс, ол, счислимые координаты и другая информация, необходимая для определения места судна. Для светила, к которому приводятся все высоты приближенное гринвичское время, полученное по Тс и точное, полученное по Тхр, должны совпадать в пределах одной минуты.В МАЕ на стр.287 где Δос= i+s 24 ИДЕЯ АСТРОНОМИЧЕСКОЙ ОБСЕРВАЦИИ. КРУГ РАВНЫХ ВЫСОТ И ВЫСОТНАЯ ЛИНИЯ ПОЛОЖЕНИЯ. 4.1. Идея астрономического определения места судна В разных точках земной поверхности светило усматривается под разными углами к горизонту, т.е. имеет разные высоты. Но существует геометрическое место точек, где высота светила постоянная. Это круг с центром в полюсе освещения светила . Полюсом освещения ( а ) называется проекция светила на земную поверхность (см. рис. 3.1 ). Кругов равных высот с центром в точке а. может быть бесчисленное множество и каждый соответствует определенной высоте. Все эти круги расположены между полюсом освещения, где высота равна 90° и большим кругом ее, где высота равна 0°. Сферический радиус круга равных высот равен 90°-й. 25 Координаты полюса освещения связаны с экваториальными координатами светила соотношениями: φa=δ, λ а = t гР , (3.1) т.е. географические координаты полюса освещения равны координатам первой экваториальной системы светила на гринвичском меридиане. Рис. 3.1. Таким образом, если знать координаты полюса освещения (их можно рассчитать с помощью МАЕ) и величину 90°- h (ее можно определить с помощью секстана), возникает принципиальная возможность построения круга равных высот на земном глобусе. Построив круг равных высот, можно утверждать, что судно находится где-то на нём. Для того, чтобы локализовать место на круге, надо проделать такую же операцию с другим светилом и построить второй круг равных высот. Пересечение двух кругов даст две точки, одна из которых является обсервованным местом судна, как это показано на рис. 3.2. Выбрать из двух точек нужную можно либо с помощью счислимой точки (на рис 3.2 точка Fc ), либо с помощью азимута одного из светил. В точках пересечения азимуты разные и пеленг на светило поможет выбрать нужную точку. Координаты точки Fo, снятые с глобуса, и будут обсервованными координатами. 26 чтооы соблюсти требуемую в судовождении точность получения координат, построение необходимо выполнять, по крайней мере, в масштабе: 1 миля в 1 мм. Для этого потребовался бы глобус диаметром 6,9 м. Поэтому такое графическое решение задачи нереально. Можно попытаться решить задачу аналитически. Для этого надо записать уравнения кругов для двух светил и решить эту систему уравнений относительно φо и λо. Уравнение круга равных высот связывает высоту светила, его экваториальные координаты и координаты судна. Оно приведено в разделе 1.2 формулой ( 1.1 ). Если в этой формуле принять часовой угол t местным часовым углом tм, который равен trp ± λEw, а высоту h - обсервованной высотой h0, в правой части получим обсервованные координаты. Тогда для двух светил можем записать два следующих уравнения кругов равных высот: В этой системе два неизвестных: φ 0 и λоТакая система в принципе решается, но уравнения трансцедентные, т.е. корни не выражаются в виде простых алгебраических выражений. Систему (3.2) можно решить либо методом итераций, т.е. методом последовательных приближений, либо с помощью сложных преобразований формул с заменой неизвестных. Итерационный метод решения системы (3.2) при наличии персональных компьютеров или программных калькуляторов не представляет особых затруднений, но они появились сравнительно недавно и исторически решение задачи пошло по «графическому пути», но с радикальным изменением: построение стали делать не из центра круга ( из полюса освещения ), а от счислимой точки и строить стали не окружность, а касательную к окружности вблизи счислимой точки. Учитывая малую кривизну круга равных высот (радиус 27 составляет сотни и тысячи миль) в пределах ошибок счисления такая замена вполне возможна. Касательная к кругу равных высот вблизи счислимого места называется высотной линией положения (ВЛП). Таким образом, место по высотам небесных светил получается на пересечении ВЛП. Следует заметить, что в редких случаях, когда радиус круга равных высот небольшой, т.е. полюс освещения и место судна находятся на одной путевой карте, можно использовать графический метод в чистом виде: наносить на карту полюса освещения, рассчитывать радиусы, равные 90°- h , и циркулем строить круги равных высот. Так поступают в тропиках, когда высота Солнца больше 88° (радиусы кругов менее 120 миль). 4.2. Высотная линия положения Поясним идею построения ВЛП от счислимой точки. Допустим, измерена и исправлена высота какого-либо светила hо. Этой высоте на земной поверхности будет соответствовать круг обсервованной высоты. На рис. 3.3 фрагмент этого крута вблизи счислимой точки FQ обозначен буквами bb'. Как было показано в предыдущем параграфе, кругов равных высот бесчисленное множество и один из них проходит через счислимую точку. Высота, соответствующая этому кругу, называется счислимой высотой hс. Фрагмент круга счислимой высоты сс' показан на рис. 3.3. В курсе математических основ судовождения доказывается, что при изменении высоты светила на некоторое количество дуговых минут круг равных высот перемещается по земной поверхности на такое же количество морских миль. Следовательно, расстояние между кругами счислимой и обсервованной высот равно h0 hс миль. Эта разность называется переносом р Из рис. 3.3 также следует, что расстояние между кругами равно (900- hс) –(900hо) = hо- hс. 28 Расстояние между концентрическими окружностями измеряется по радиусу, который направлен от любой точки окружности к центру Таким образом, если при счислимой точке FО построить направление на полюс освещения (азимут светила) и по нему отложить перенос, мы получим одну из точек круга обсервованной высоты. На рис. 3.3 это точка к. Она называется определяющей точкой. Так как касательная к окружности перпендикулярна к радиусу, то проведя в определяющей точке перпендикуляр к направлению на светило, получим ВЛП. Из вышесказанного следует, что для построения ВЛП необходимо на карте иметь счислимую точку, знать азимут светила и перенос. Высотная линия положения играет ключевую роль в астрономическом определении места судна. В некоторых случаях требуется аналитическое решение задачи. Выведем уравнение ВЛП. На рис. 3.4 показана счислимая точка Fc и определяющая точка к. Осью абсцисс является параллель, осью ординат - меридиан счислимой точки. Где-то на ВЛП расположена обсервованная точка Fo. По оси ординат откладывается разность широт между счислимой и обсервованной точками, а по оси абсцисс - отшествие Δ w. Запишем уравнение ВЛП как уравнение прямой в виде: В этом уравнении у=Δφ; x=Δw; к - тангенс угла наклона прямой к оси абсцисс - tg a ; b - отрезок оси ординат, отсекаемый прямой.Непосредственно с чертежа имеем: b = p/cos A; tga = - tg А. Знак минус поставлен, так как угол а во второй четверти. Подставляя вышеприведенные значения в формулу ( 3.4 ), получим после несложных преобразований: 29 Это и есть уравнение высотной линии положения. Напомним, что в уравнении ( 3.5 ) условные обозначения следующие: Δφ= φо- φс, Δw= (λо-λс) cosφ; р = h0 - hc ; A - азимут светила. Азимут и перенос, с помощью которых строится высотная линия положения, называются элементами ВЛП. Азимут и счислимая высота могут быть рассчитаны по формулам (1.1) и (1.2), как это показано в примерах 1.1 и 1.2, или рассчитаны по таблицам, как это показано в примерах 2.2 и 2.3. Обсервованная высота получается исправлением измеренной секстаном высоты. Примеры исправления высот даны в разделе 2.7. В свою очередь, hc и А вычисляются по φс, δ и tM. Широту счислимую φс снимают с карты, а δ и tM рассчитывают с помощью МАЕ на гринвичское время и дату. Всё это диктует следующий порядок вычислений при определении места судна. Вначале по Тс и Тхр рассчитывается гринвичская дата и время. Затем с помощью МАЕ рассчитывается местный часовой угол и склонение светила и решается параллактический треугольник. Потом исправляется высота и рассчитываются элементы ВЛП. На карте ВЛП прокладывается следующим образом. В счислимой точке проводят линию азимута на светило. С боковой рамки карты снимают расстояние, равное переносу, и откладывают по линии азимута. Таким образом получают определяющую точку. Через определяющую точку перпендикулярно линии азимута проводят ВЛП. Возможны три варианта расположения ВЛП относительно счислимой точки: а.) перенос положительный – определяющая точка откладывается по направлению на светило (рис. 3.5а); б.)перенос равен нулю - ВЛП проходит через счислимую точку (рис. 3.56); в.)перенос отрицательный - определяющая точка откладывается в противоположную от светила сторону (рис. 3.5в). Если счисление ведётся на карте мелкого масштаба, во избежание потери точности при построении, ВЛП прокладывается на бумаге. 30 В этом случае счислимую точку принимают в центре листа бумаги. Масштаб обычно выбирают в 1 см 1 миля и строят линейный масштаб в левом нижнем углу. Затем построение делают, как на карте, т.е. проводят линию азимута, по ней откладывают перенос и через определяющую точку проводят ВЛП. Построив одну ВЛП, можно утверждать, что, место судна находится где-то на этой линии. Для определения места судна необходимо построить ВЛП второго светила. Пересечение двух ВЛП даст обсервованную точку. Построение и определение обсервованных координат возможно как на карте, так и на бумаге. Построение на карте не вызывает затруднений и показано на рис. 3.6. На рисунке показан фрагмент прокладки около обсервации: счислимая точка Fс обсервованная точка FQ, обозначенная двойным кружком, и невязка, показывающая направление из счислимой точки в обсервованную и расстояние между ними. Обсервованные координаты снимаются с рамок карты. Построение на бумаге выполняется как и на карте, но обсервованные координаты рассчитываются относительно счислимых. Построение ВЛП по элементам и определение обсервованных координат покажем на конкретном примере. решение. В центре листа бумаги (рис. 3.7) выбираем счислимую точку. В левом нижнем углу строим линейный масштаб. С помощью транспортира откладываем первый азимут 70° и по этому направлению в выбранном масштабе откладываем перенос. Через полученную точку проводим перпендикуляр — первую ВЛП. Затем откладываем второй азимут и в противоположном направлении, так как перенос отрицательный, - второй перенос. Через полученную вторую определяющую 31 точку проводим перпендикуляр - вторую ВЛП. Точку пересечения двух ВЛП обводим двойной окружностью. Это и есть обсер-вованная точка. Чтобы определить обсервованные координаты, измеряем в выбранном масштабе расстояние между счислимой и обсервованной параллелями -разность широт: РШ=1,3' к S. Измеряем расстояние между счислимым и обсервованным меридианами отшествие: к Е. Переводим отОТШ=3,1' шествие в разность долгот по формуле: РД = ОТШ / cos φ=3,1 /cos 45,6° = 4,4' к Е. Измеряем расстояние между счислимой и обсервованной точками и транспортиром измеряем направление из счислимой в обсервованную точку и записываем невязку: С 112° - 3,3 мили. Высотная линия положения обладает несколькими свойствами, которые следует учитывать при астрономическом определении места судна. 1.Первым свойством ВЛП можно назвать приближённость. Действительное место судна находится не на касательной, а на круге равных высот. Причём, чем дальше от определяющей точки находится действительное место, тем больше погрешность от замены круга касательной. Таким образом, метод ВЛП несет в себе неустранимую погрешность метода. Но исследования показывают, что при высотах и широтах менее 70° и переносах менее 30', что обычно выполняется, погрешность лежит в пределах допустимого. 2.Вторым свойством является универсальность. Это означает, что ВЛП можно использовать при любых азимутах светила. 32 3.Третьим свойством является независимость положения ВЛП от счислимого места. Если, например, в рассмотренном примере 3.1 взять другую счислимую точку, то другие счислимые координаты дадут другие переносы и ВЛП попадут на прежнее место. 33 ТОЧНОСТЬ ВЛП И ОБСЕРВОВАННОГО МЕСТА. 5.1 ОСНОВНЫЕ СВЕДЕНИЯ ИЗ ТЕОРИИ ВЕРОЯТНОСТЕЙ 1. Теория вероятностей является областью математики, рассматри вающей закономерности, которым подчинены случайные явления, события или величины. 2. Случайными величинами называются такие переменные величины, которые в процессе опыта могут принимать какие-либо конкретные, заранее неизвестные значения. Получение того или иного результата измерения или действия относится к разряду случайных явлений, сам же результат является случайной величиной. 3. Вероятностью случайного события называют меру объективной возможности его наступления в определенных, могущих повторяться неограниченное число раз условиях. Математическая теория вероятностей применима только там, где вероятность допускает количественное ее выражение в виде числа. Численное значение вероятности определяется как отношение числа случаев п испытаний, благоприятствующих появлению данного события к общему числу N испытаний Вероятность выражается либо в процентах, либо правильной дробью. Ее величина определяется на основании материалов, полученных опытным путем (апостериорно) или на основании известных законов, которым подчинено распределение данных событий величин или явлений (априорно). Вероятность достоверного события, которое неизбежно происходит в каждом испытании, равна 1. Численное значение вероятности проявляется в большом, практи чески неограниченном ряду испытаний. 4. События называют зависимыми, если появление или непоявление одного из них вызывает изменение вероятности появления другого. Если же появление или непоявление одного события не изменяет вероятности появления другого события, то такие события называют независимыми. 6. Вероятность появления хотя бы одного события из ряда независимых событий вычисляется по формуле 5. Вероятность одновременного появления любого числа независимых событий равна произведению вероятностей этих событий 6. При измерении одной и той же величины, получаемые результаты, в большинстве случаев отличаются друг от друга. Причинами их отличия являются: 7. несовершенство органов чувств наблюдателя; — несовершенство измерительных инструментов; — влияние внешних условий. Измерения, произведенные одним и тем же наблюдателем, при одних и тех же условиях и с помощью одного и того же инструмента называются равноточными. 34 Ошибки равноточных измерений не абсолютно одинаковы, но имеют один и тот же порядок. 8. Разность между каким-либо результатом измерения и истинным значением измеряемой величины называется истинной ошибкой. Вследствие того что истинное значение измеряемой величины определить нельзя, ошибки измерений определяют относительно вероятного значения искомой. 9. Ошибки измерений делятся на случайные, систематические и смешанные. Случайные ошибки являются следствием совокупного влияния самых различных факторов, учесть которые не представляется возможным. Эти ошибки содержатся в подавляющем большинстве измерений. Случайные ошибки обладают следующими свойствами, проявляющимися в большом ряду измерений: — равные по абсолютной величине, но противоположные по знаку ошибки равновероятны; при увеличении числа измерений сумма случайных ошибок стремится к нулю; — малые ошибки более вероятны, чем большие. 10. Систематические ошибки обусловливаются факторами, искажающими результаты измерений по определенному закону и в определенном направлении. Эти ошибки могут быть: — постоянными, т. е. одинаковыми во всех измерениях; — переменными прогрессивного типа, т. е. такими, которые в данном ряду последовательных измерений только возрастают или только уменьшаются; — периодическими, изменяющимися по какому-либо периодическому закону; — односторонне действующими. При наличии односторонне действующих ошибок результаты измерений отличаются от действительного значения измеряемой величины в одну сторону, но на различные величины. Систематические ошибки во многих случаях могут быть учтены определением поправки измерительного прибора или исключены особыми приемами обработки результатов измерений. Смешанные ошибки представляют собой сочетание случайных и систематических ошибок. Эти ошибки свойственны большинству измерений, производимых штурманом. Ошибки, проявляющиеся в каждом измерении данного ряда, называются повторяющимися ошибками. Повторяющиеся ошибки могут действовать как систематические (при малой продолжительности измерений или как случайные (при продолжительности измерений, соизмеримой с периодом изменения повторяющейся ошибки). 11. Кроме ошибок, в процессе измерений могут быть промахи Исключение промаха возможно только тщательным повторением измерения. 12. Случайные ошибки измерений не хаотичны. Они подчиняются вполне определенным законам распределения. В практике кораблевождения наибольшее применение имеет нормальный закон или закон Гаусса, характеристиками которого являются: 35 а) частота у появления ошибок х повышается с уменьшение самих ошибок и где h — постоянный параметр, называемый мерой точности. Графически закон Гаусса изображается кривой (рис. 1), называемой ошибок или кривой нормального определяетсякривой следующим выражением: распределения; б) вероятность того, что. ошибка измерения лежит в пределах от X1 до Х2, определяется интегралом вида Эта вероятность графически изображается площадью, ограниченной кривой ошибок, осью абсцисс и двумя ординатами (рис. 1). При Х1 = — °° и х2 = + °° вероятность Р = 1; в) вероятное значение искомой величины А, называемое математическим ее ожиданием, при п равноточных измерений равно среднему арифметическому из полученных результатов измерений а и а2 , ..., а„ повышение точности среднего арифметического при данной точности измерений возможно только за счет увеличения числа этих измерении, однако при любом числе измерений ошибка среднего арифметического не может быть меньше систематической ошибки. Для оценки точности измерений приняты показатели их точности, к которым относятся: — средняя квадратическая ошибка (отклонение); — вероятная, или срединная ошибка (отклонение); 36 —• средняя ошибка (отклонение). Средняя квадратическая ошибка m одного измерения в данном их ряду для нормального закона распределения соответствует абсциссе точки перегиба кривой ошибок, и при минимальной величине эта ошибка обладает максимальной вероятностью, равной 0,683. Для вычисления средней квадратической ошибки применяются следующие формулы: — при значении искомой, полученном с помощью более точного измерительного инструмента или вычисленном по соответствующей формуле, обеспечивающей высокую точность результата — при вероятном значении искомой, равном среднему арифметическому из результатов измерений Средняя квадратическая ошибка среднего арифметического вычисляется по формуле 5.2 Определение СКП измерения тос Для уменьшения влияния случайных погрешностей измерения и определения возможных промахов рекомендуется измерять серию из трёх высот светила с последующим осреднением и отсчётов секстана, и моментов по хронометру. Вместо расчёта СКП по формуле Бесселя можно воспользоваться более простым способом размаха. В этом случае рассчитывается размах R по 37 приведем пример расчета СКП измерения высот. и умножается на коэффициент, выбранный из табл. 2.1 по числу измерений где т —п:СКП измерений; к - коэффициент из табл. 2.1. приведем пример расчета СКП измерения высот. На листе миллиметровой бумаги строится график. По оси х откладываются моменты измерения, а по оси у — высоты. Затем через полученные точки на глаз проводится прямая таким образом, чтобы количество точек над ней и под ней было равным. С графика снимаются расстояния до прямой от наиболее удаленных точек над и под прямой. Эти расстояния складываются и дают размах, с помощью которого по формуле (2.10) подсчитывается СКП измерений. Для штурмана, имеющего навык астрономических наблюдений, при хорошем горизонте СКП измерения высот Солнца составляет 0,5' , СКП измерения высот звезд 0,7'. 5.3. Точность ВЛП и обсервованных координат Положение ВЛП определяется азимутом и переносом и все погрешности в них влияют на это положение. В конечном счёте, эти погрешности сказываются на обсервованных координатах. Азимут с помощью калькулятора рассчитывается с точностью до 0´,1; по таблицам ТВА-57 - до 0,´2; по таблицам ВАС-58 - до 0,1°. Это значительно выше, чем точность графического построения. Поэтому можно считать, что погрешности в азимуте практически не влияют на положение ВЛП. Точность переноса определяется его средней квадратической погрешностью (СКП), которая подсчитывается по формуле: 38 Как было сказано, для штурмана, имеющего хороший навык, при хорошем горизонте можно принять тос = 0,7'. При исправлении высот погрешности вносят поправка индекса, инструментальная поправка и наклонение горизонта. По исследованиям Б.И.Красавцева их совместное влияние оценивается величиной тΔ=0,4'. Подставляя в формулу (3.7) эти значения, получим тhо=0,8'. Точность счислимой высоты зависит от способа ее вычисления. С помощью калькулятора она вычисляется практически безошибочно. По таб-лицам ТВА-57 высота вычисляется с точностью О,1- 0,2', по таблицам готовых ответов (ВАС-58, HO-2I4) - 0,3'- Можно принять тhс=0,3. Подставляя указанные значения тh0 и тhc в формулу (3.6), получим тр=0,9'. Напомним, что полученное значение относится к опытному штурману. Для штурмана, не имеющего навыка измерения высот, эта величина может быть в 1,5-2 раза больше. Из теории вероятностей известно, что случайная величина не отклоняется от наиболее вероятного значения на величину большую, чем ±т с вероятностью 68,3%. Это означает, что ВЛП действительного места судна с вероятностью 68,3% находится где-то в полосе р ± тп„.. Эта полоса называется полосой положения. Она показана на рис. 3.8 39 пересечение полосы положения с меридианом и параллелью показывает, как влияет погрешность в переносе на погрешность в обсервованной широте δφ и обсервованной долготе δλ= δw /cos φ . На рис 3.8 видно, что (3.8) Анализ формул ( 3.8 ) показывает, что наивыгоднейшим условием определения широты является наблюдение светила в меридиане наблюдателя, когда его азимут около 0° или 180°. В этом случае погрешности измерения высот влияют менее всего. Наивыгоднейшим условием определения долготы является наблюдение светила около первого вертикала. В этом случае погрешности в измеренных высотах оказывают наименьшее влияние на обсервованную долготу, так как sin А имеет наибольшее значение. Область вероятных мест судна лежит на пересечении двух полос положения. Пересекаясь, две полосы образуют, так называемую фигуру погрешностей, как это показано на рис. 3.9. В зависимости от величин СКП первой и второй ВЛП и угла их пересечения эта фигура может быть квадратом, ромбом или параллелограммом. Вероятность нахождения действительного места судна внутри такой фигуры погрешностей равна произведению вероятностей нахождения в каждой из полос: 0,68x0,68=0,466= 46,6%. Чем уже полосы положения, тем меньше площадь фигуры погрешностей, меньше разброс вероятных мест судна, больше точность обсервации. \ 40 В курсе математических основ судовождения доказывается, что более корректной фигурой погрешностей, чем четырехугольник, является эллипс, так как вероятность нахождения действительного места судна вдоль границ эллипса остается постоянной. Выражения для полуосей эллипса и угла его ориентировки достаточно сложны, но в случае равноточных ВЛП, что обычно имеет место, формулы упрощаются: где а - оольшая полуось; б - малая полуось; θ- острый угол между ВПЛ. Большая ось эллипса направлена по биссектрисе острого угла θ. Эллипс погрешностей отроится в следующем порядке. По формулам (3.9 ) рассчитываются полуоси эллипса. Проводится биссектриса острого угла между ВЛП и по ней в обе стороны от обсервованного места откладывается значение большой полуоси. Затем перпендикулярно к ней откладывается в обе стороны значение малой полуоси и через четыре точки от руки проводят эллипс. Эллипс с полуосями, рассчитанными по формулам (3.9) , называется средним эллипсом погрешностей. Вероятность нахождения действительного места судна в нём равна около 39%. Международная Морская Организация (ИМО), регламентирующая стандарты судовождения, требует, чтобы фигура погрешностей накрывала действительное место судна с вероятностью 95%. Чтобы добиться такой вероятности, полуоси среднего эллипса надо увеличить в 2,5 раза. Как уже говорилось, оценка точности обсервованного места эллипсом погрешностей является математически обоснованной. Эллипс показывает направления максимального и минимального разброса вероятных мест судна. Но недостатком такой оценки является относительная сложность построения. Поэтому в судовождении чаще используют другую оценку точности обсервации - среднюю квадратическую погрешность обсерво-ванной точки. СКП обсервованной точки - это радиус круга, в котором действительное место судна находится с вероятностью около 65%. СКП обсервованной точки (радиус круга) обозначается буквой М и рассчитывается по формуле: Эта формула справедлива для любого количества ВЛП. В ней mpi -СКП каждой ВЛП, ΔAt - попарная разность азимутов для всех возможных комбинаций ВЛП. Для конкретного числа равноточных ВЛП формула (ЗЛО) принимает следующие выражения. Для двух ВЛП: 41 ( Если три светила равномерно распределены по горизонту, т.е. разность азимутов составляет около 120°, для трёх ВЛП формула (3.10 ) даёт выражение: (3.12) Для четырёх светил, расположенных по горизонту примерно через 90°, СКП обсервованного места (3.13) Формулы (3.11) - (3.13 ) используются для оценки точности обсервованного места судна при определении по «одновременным» наблюдениям высот светил. Чтобы получить радиус круга, накрывающего действительное место судна с вероятностью 95%, СКП места удваивается: R 95%= 2M. Формула (3.11) показывает, что наиболее точная обсервация по двум ВЛП достигается при разности азимутов светил около 90°. Формулы (3.12) и (3.13) получены также при условии оптимального расположения светил по горизонту. 42 АСТРОНОМИЧЕСКОЕ ОПРЕДЕЛЕНИЕ ПОПРАВКИ КОМПАСА. 6.1Сущность астрономического определения поправки компаса В открытом море поправка компаса может быть определена только по небесным светилам. Получается она, как и в навигационных способах, сравнением истинного и компасного пеленгов светила: Δк = ИП-КП (3.14). Пеленговать можно любые светила: днём Солнце, а ночью звёзды, планеты, Луну. Основным требованием к пеленгуемым светилам является их небольшая высота, до 20°. Если днём высота Солнца превышает 20°, можно пользоваться откидным зеркалом пеленгатора. Пеленгование заключается в совмещении визирной нити с центром светила и пузырьком воздуха и снятии в этот момент отсчёта по картушке компаса. При небольших высотах можно наклонять котелок компаса на себя, удерживая пузырёк воздуха на нити. Для уменьшения влияния случайных погрешностей следует измерить несколько пеленгов и усреднить их. Вместо серии пеленгов можно вопользоваться методом «пристрелки», когда берутся пеленга и после того, как отсчёты становятся стабильными, записывается последний отсчёт. Одновременно с отсчётом компасного пеленга замечается момент с точностью до секунд. Достаточной точностью являются несколько секунд. Точность поправки компаса зависит, в основном, от точности компасного пеленга. Точность же компасного пеленга зависит от погрешностей пеленгования и точности е компасного пеленга зависит от погршностей пеленгования и точности самого курсоуказателя. По данным Ь.И.Красавцева среднюю квадратическую погрешность поправки компаса тΔк можно считать равной 0,5°. Поэтому вычисленную по формуле поправку компаса округляют до ближайшего целого градуса. Истинный пеленг светила получается решением параллактического треугольника. Для вычисления можно воспользоваться тремя различными формулами. В зависимости от этого существуют три способа определения поправки компаса: метод моментов, метод высот, метод высот и моментов. 6.2 Метод моментов. В этом методе исходными аргументами при решении параллактического треугольника являются φр, δ и tM. Азимут вычисляется по формуле (1.2). Азимут также может быть вычислен по таблицам, как это показано в примерах 2.2 и 2.3. Полученный по формуле или по таблицам азимут должен быть переведён в круговой счёт. Широта, необходимая для решения параллактического треугольника, снимается с карты, а часовой угол и склонение светила рассчитываются с помощью МАЕ. 43 Так как часовой угол изменяется пропорционально времени, то и метод называется методом моментов. Определение поправки компаса методом моментов осуществляется в следующем порядке. 1. Подготовить к наблюдениям пеленгатор и секундомер. 2. Выбрать подходящее светило: яркое и на небольшой высоте. 3. Измерить серию пеленгов и записать следующую информацию: Тс,ол, средний КП светила, средний Тхр, φс, λс, UХР , КК. Компасный курс необходим для определения поправки магнитного компаса путём сличения на данном курсе. 4. Рассчитать приближённое и точное ТГР, а также гринвичскую дату и на этот момент с помощью МАЕ определить tМ и δ светила. 5. По формуле (1.2) или по таблицам рассчитать азимут светила. 6. Перевести полученный азимут в круговой счёт и рассчитать поправку компаса. 7. Проанализировать полученную поправку и сделать запись в судовой журнал. Пример 6.1. 1.09.02 г. Тс=20ч38м; ол=76,7; φс=59°14' N, λс=20°50' Е; ГКК=135°; Uхр=+6м20с. Измерена серия пеленгов о; Волопаса: средний КП=274,8°; средний Тхр= 7ч32м06с. Определить ΔК. Решение. Рассчитываем приближённое и точное гринвичское время и дату. На этот момент с помощью МАЕ находим часовой угол и склонение а.Волопаса( Арктур) С помощью калькулятора по формуле ( 1.2 ) рассчитываем полукруговой азимут: А= N 86,4° W. Переводим полученный азимут в истинный пеленг и рассчитываем поправку компаса. Округляем полученную поправку и принимаем ΔК = -1°. 44 При определении места судна по небесным светилам азимут всегда вычисляется, как один из элементов ВЛП. Поэтому целесообразно при определении места судна дополнительно к измеренной высоте одного из светил измерить ещё и компасный пеленг. Тогда дополнительно к обсервованным координатам можно будет получить и поправку компаса по формуле (3.14) 6.2 Метод высот. В этом методе исходными аргументами при решении параллактического треугольника служат φ, δ и h. . В этом случае одна из теорем сферической тригонометрии даёт следующее выражение для азимута: (3.15) Поэтому методом высот пользуются только в частном случае, когда высота светила известна, например, во время видимого восхода или захода верхнего края Солнца. В этом случае его высота равна: (3.16) переменным и формулу (3.15) можно табулировать по двум φ и δ (как сделано в таблице 20 МТ-75). Если же таблицу помещать в ежедневных таблицах МАЕ, становится известным и среднее для разворота значение склонения и азимут табулируется только по широте.Азимут верхнего края Солнца, который приводится в ежедневных таблицах МАЕ, рассчитан для фиксированных значений широты и следующих значений слагаемых формулы (3.22): R и р на среднюю дату разворота, р - нормальная астрономическая рефракция в горизонте, d = 0. Таким образом, выбранный из МАЕ азимут надо интерполировать по широте (ΔАΦ ), а также по долготе (ΔАλ), так как суточное изменение склонения меняет азимут. Эта интерполяция осуществляется поправками за широту и долготу также, как и моменты восхода (захода) Солнца или Луны (см. пример 2.2). Кроме того, если температура и давление воздуха отличаются от нормальных (+10°С, 760 мм рт.ст) и высота глаза наблюдателя больше 0, необходимо еще учесть поправку, которая выбирается с помощью таблиц А и В на стр.280 МАЕ. Покажем определение поправки компаса по видимому заходу Солнца на конкретном примере. Пример 6.2 1.09.02 г. ТС=17Ч45М; ол=15,2; φ c=59°O5'N; λ c=135.l0'W КК=120°. Измерен компасный пеленг заходящего верхнего края Солнца, КП=286,0°; t°=+20оС; P=750 мм рт.ст.; е=15,4 м. Определить поправку компаса. Решение. 1. Из МАЕ на 1.09 для ближайшей меньшей широты 5 8°N выбираем азимут захода верхнего края Солнца 286,9°. Находим разность азимутов с ближайшей большей табличной широтой +1.1° и суточную разность ази мутов с последующими сутками (так как долгота западная) Асут= - 0,8°. 2. Интерполируем по широте и по долготе: ΔАΦ = +0,6°; ΔАλ = -0,3°. 45 3. На стр. 284 МАЕ по высоте глаза наблюдателя выбираем наклонение горизонта d= -6,9', а на стр. 285 для h „= 0°00' выбираем поправки за температуру и давление воздуха: Δh, = +2,0'; ΔhB= +0,5'. Находим сумму трех поправок Е = -4,4'. 4. На стр. 280 МАЕ по широте и дате в таблице А выбираем К=0,03, а из таблицы В по К иЕ поправку азимута ΔА = +0,1°. Следует заметить, что поправка азимута на условия наблюдения (ΔА) достигает 0,4°—0,5° только в июне и июле в широтах 60° и более при высоте мостика более 20 м. Если какое-либо из этих условий не выполняется, поправкой можно пренебречь и ограничиться только интерполированием по широте и при больших долготах — по долготе. 6.3 Метод высот и моментов. В этом методе исходными аргументами для решения параллактического треугольника являются h, tM, δ. Азимут вычисляется по теореме синусов сферической тригонометрии: (3.17) На рис. 3.18 показана небесная сфера в проекции на плоскость первого вертикала. 46 Как видим, для решения по этой формуле надо не только измерять высоту, но и замечать момент. Поэтому этим способом также пользуются в частном случае, когда высота светила известна, а именно, при пеленговании Полярной звезды. В этом случае высота, примерно, равна широте, к тому же и момент не надо замечать по хронометру, так как азимут Полярной изменяется медленно, достаточно Тс. Полярная звезда не удаляется от меридиана наблюдателя более, чем на 50' (рис. 3.18). Поэтому её азимут колеблется в пределах от 0° до 2° в NE и NW четвертях горизонта. По этой формуле составляется таблица азимута Полярной и помещается в МАЕ. В ней аргументами являются SM и φ, а значения Δ и τ берутся средние за год. Исследования автора показали, что изменениями азимута, вызванными прецессией, нутацией, годичной аберрацией и собственным движением Полярной на пятилетнем отрезке времени можно пренебречь, а это значит, что таблицей, составленной для некоторой эпохи можно пользоваться 5 лет до неё и 5 лет после неё, поэтому кроме МАЕ, она помещена в МТ-2000. Преимуществом определения поправки компаса по Полярной звезде является простота получения азимута. К недостаткам следует отнести ограничение метода северным полушарием и необходимость использования откидного зеркала в умеренных широтах для пеленгования Полярной. Практическое определение поправки компаса производится в следующем порядке. 47 1. Измеряется серия пеленгов Полярной звезды и записывается следующая информация: средний КП; Тс; ол; φс, λс, КК. 2. Рассчитывается приближённое Тгр и гринвичская дата. 3. На этот момент по МАЕ рассчитывается Sм с точностью до 1°. 4. Из таблицы «Азимут Полярной» в МАЕ по φ си Sм, выбирается азимут. Порядок определения наименования азимута указан внизу под таблицей. 5. Полученный азимут переводится в круговой счёт и рассчитывается поправка компаса. 6. Поправка компаса анализируется и делается запись в судовой журнал. Пример6. 3. 1.09.02 г.; ТС=23Ч38М; ол=24,7;φс=36°48' N; λс=30°46' Е; КК=92°. Измерили серию пеленгов Полярной звезды, средний КП=1,1°. Определить поправку компаса. Решение. Рассчитываем приближённое Тгр и гринвичскую дату и на этот момент с помощью МАЕ определяем приближённое Sм. 48