Лекция №13 Кинематика и динамика КШМ. Перемещение,. скорость и
advertisement

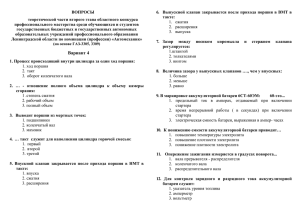
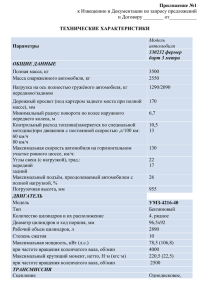
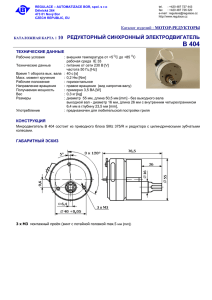
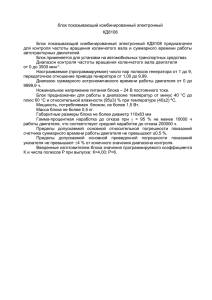
Лекция №13 Кинематика и динамика КШМ. Перемещение,. скорость и ускорение поршневой группы. Типы КШМ.. Газовые силы Общие сведения к расчету динамических сил в элементах энергетической установки Основным звеном энергетической установки предназначенной для транспортной техники является кривошипно-шатунный механизм. Его основной задачей является превращение прямолинейного движения поршня во вращательное движение выходного вала. Условия работы элементов кривошипно-шатунного механизма характеризуются широким диапазоном и высокой частотой повторения знакопеременных нагрузок в зависимости от положения поршня, характера происходящих процессов в объеме цилиндра и частоты вращения коленчатого вала двигателя. Расчет кинематики и определение динамических сил, возникающих в кривошипно-шатунном механизме, выполняется для заданного номинального режима, с учетом полученных результатов теплового расчета и ранее принятых конструктивных параметров предложенного прототипа. Типовые схемы кривошипно-шатунного механизма, с учетом смещения осей коленчатого вала и оси цилиндров представлены на рисунке 1. Рисунок 1 - Типовые схемы кривошипно-шатунного механизма Основной задачей кинематического расчета является определение перемещения, скорости и ускорения элементов кривошипно-шатунного механизма. Задачей динамического расчета является определение и анализ сил, действующих в кривошипно-шатунном механизме. Основными силами считаются силы инерции движущихся масс и силы давления газов в рабочем объеме цилиндра при совершении рабочего цикла. Определение и анализ сил, как правило, проводят для режима максимальной заданной мощности, максимальных газовых нагрузок и сил инерции движущихся масс при заданной номинальной частоте вращения. Характер изменения текущих значений газовых сил определяем на основе результатов расчета давлений в характерных точках рабочего цикла после построения и развертки индикаторной диаграммы давления в объеме цилиндра в координатах по углу поворота коленчатого вала. Угловая скорость вращения коленчатого вала, в соответствии с заданной частотой вращения, остается постоянной и с учетом размеров цилиндра, конструктивных особенностей КШМ и масс его деталей определяет характер изменения сил инерции по углу поворота коленчатого вала. Силы инерции движущихся масс кривошипно-шатунного механизма делят на силы инерции возвратно-поступательно движущихся масс Рj и силы инерции вращательно движущихся масс КR. Детали КШМ по характеру их движения делят на три группы: -детали, совершающие возвратно-поступательные движения; -детали, совершающие вращательное движение; -детали, совершающие сложное плоскопараллельное движение (шатунная группа). К массе деталей, совершающих возвратно-поступательное относятся масса поршня, масса поршневых колец, масса поршневого пальца. Условно считаем, что общая их масса сосредоточенная по центру на оси поршневого пальца-mп. К массе деталей, совершающих вращательное движение относятся масса шатунной шейки mшш и приведенная масса щек кривошипа mщ, сосредоточенная на оси шатунной шейки. Их массу заменяют общей массой, приведенной к точке центра шатунной шейки на радиусе кривошипа Rкр, и обозначаем mк. К массе деталей, совершающих сложное плоскопараллельное движение, относятся массы шатуна и его элементов. Для упрощения расчетов, массу деталей, совершающих сложное плоскопараллельное движение (шатунная группа) заменяют системой 2-х статически замещающих разнесенных масс: -массы шатунной группы, сосредоточенной на оси поршневого пальца – mшп; и -массы шатунной группы, отнесенной и сосредоточенной на оси шатунной шейки коленчатого вала – mшк. Обязательным условием является выполнение условия ( 1) mш mшп mшк . В целом, с целью упрощения динамического расчета, действительный кривошипно-шатунный механизм заменяют эквивалентной системой 2-х сосредоточенных масс: - масса сосредоточенная в точке на оси поршневого пальца – для общей массы деталей совершающих возвратно-поступательное движение - m j, m j mп mшп (2) -масса сосредоточенной в точке на оси шатунной шейки – для деталей, совершающих вращательное движение - mR , рисунок 2; mR mкр mшкр (3) Общее воздействие газовых сил и сил инерции движения определяют суммарную силу, прилагаемую в центре пересечения осей цилиндра и горизонтальной оси поршневого пальца. Суммарная сила распределяется на ее производные. Боковую силу, действующую на стенку цилиндра перпендикулярно оси поршневого пальца, и продольную силу, направленную вдоль оси стержня шатуна. Значения масс поршня, шатуна и колена вала -mn, mш и mк определяются исходя из типа двигателя, его назначения и конструктивных удельных масс поршня, шатуна и колена кривошипа, отнесенных к единице поверхности диаметрального сечения поршня - F п цилиндра, таблица 1. При выборе значения удельной конструктивной массы элементов КШМ внимательно изучите конструктивные особенности двигателя, предложенного в качестве прототипа. Необходимо учесть расчетный режим работы, максимальные значения давления и температуры, используемый материал для изготовления исследуемой детали КШМ. Таблица 1 –Удельные конструктивные массы элементов КШМ Параметры Конструктивная масса поршневой группы m'n (кг/м2) Конструктивная масса шатуна m'ш , кг/м2 Карбюраторные двигатели Дизельные двигатели n ≤ 4000 мин -1 Автомобильные n > 4000мин -1 Тракторные (1.2…1.3)·D ц (2,0…2,2)·Dц (1.3…1.4)·D ц (2.2…2.4)·D ц (1.5…2.0)·D ц (2,3…2,8)·D ц (1.8…2.4)·D ц (2,5…3,2)·D ц Конструктивная масса колена кривошипа m'к (кг/м2) вал стальной вал чугунный 200…300 300…350 250…350 350…400 Для начала выполнения кинематического и динамического расчета необходимо принять значения конструктивных удельных масс элементов кривошипно-шатунного механизма из таблицы 1. Значения таблицы 1 приведены на основе опытно-статистических данных, полученных ведущими предприятиями при проектировании и доводке разрабатываемых конструкций двигателей. C учетом принятых значений определите реальные значения массы отдельных элементов кривошипно-шатунного механизма Масса поршня mn = m'n · F п , к Масса шатуна mш = m'ш · F п , к (5) mк = m'к · F п , к (6) Масса колена кривошипа Тогда общая масса элементов КШМ поступательное движение - m j будет равна (4) совершающих m m 0,275 m п j возвратно- . ш (7) Общая масса элементов совершающих вращательное движение с учетом приведения и распределения массы шатуна определяется из зависимости m m 0,725 m К R (8) ш Для V -образных двигателей с 2-я шатунами на шатунной шейке m m 2 (0,725 m R К ш ) (9) Для удобства общения и использования результатов и данных теплового расчета, необходимые данные и их значения сводим в общую таблицу исходных данных для динамического расчета сил действующих в отдельных элементах КШМ, с учетом их перераспределения. Для определения динамических сил действующих в элементах КШМ необходимо определить кинематические параметры перемещения, скорость и ускорение. Перемещение поршня за каждый шаг расчета от своего первоначального положения в ВМТ определяется из выражения: (1 cos 2) Sn R кр (1 cos ) , мм; 4 Взяв производную по времени от выражения, перемещение поршня, определяем скорость поршня: (10) определяющего C dS / dt R кр sin , м / с; 2 sin 2 (11) где – угловая скорость вращения коленчатого вала двигателя при номинальной частоте: n рад/с 30 (12) При постоянной угловой скорости вращения коленчатого вала, линейная скорость возвратно-поступательно движущихся масс, отнесенных нами к поршневой группе и ускорение перемещения массы по углу поворота коленчатого вала, остается величиной переменной, что необходимо учитывать при определении текущего значения суммарных сил действующих в элементах КШМ. Текущее значение ускорения, движущихся масс, определяем из выражения производной по времени от скорости перемещения: cos( ) (cos )2 j dc / dt R кр , м / с2 ; 3 (cos ) cos 2 (13) где - угол отклонения шатуна от оси цилиндра, рисунок 1. Его значение определяется из соотношения: sin (sin к); (14) где = а / Rкр - относительное смещение оси цилиндров от оси коленчатого вала. Расчетно-графическое определение динамических сил в элементах и сопряжениях КШМ В реальных условиях основными силами, воздействующими на элементы КШМ, являются силы инерции движущихся масс и силы давления газов в рабочем объеме цилиндра при совершении рабочего цикла. Их совместное воздействие определяет суммарную силу и ее производные, действующие в определенных точках КШМ. Перед проведением расчетов динамических сил, внимательно изучите схему и направление действующих сил в кривошипно-шатунном механизме работающего двигателя, рисунок 2 Рисунок 2 - Схема и размещение сил действующих в элементах КШМ Определение и анализ сил, как правило, проводят для режима максимальной заданной мощности, максимальных газовых нагрузок и сил инерции движущихся масс при заданной номинальной частоте вращения. Реальная сила давления рабочего газа на поршень Pг определится как разность абсолютного давления в объеме цилиндра Рг и противодавления в объеме картера двигателя. Давление в объеме картера можно принять равным абсолютному давлению окружающей среды Ро. Тогда текущее значение давления и нагрузки от газовых сил определяем из соотношения: Pг= Р- Ро , МПа (15) где Ро – давление окружающей среды и в картере; Pг – текущее значение абсолютного давления газа в рабочем объеме цилиндра двигателя . Его значение можно получить только после выполнения 2-х этапов расчетов и построений. Первый этап. Расчетное определение текущего значения давления в зависимости от положения поршня, т.е. изменения объема и последующего построения индикаторной диаграммы в координатах P –V. Второй этап. Перестроить индикаторную диаграмму предварительно представленную в координатах P –V в диаграмму изменения давления, (т. е. индикаторную диаграмму), в координатах по углу поворота коленчатого вала. Порядок и методика расчета и построения индикаторной диаграммы в координатах P –V. (См. МУ к КУР ПРоек) Рисунок 3 - Индикаторная диаграмма бензинового двигателя Протекание индикаторной диаграммы реального двигателя несколько отличается от полученной расчетным путем. С учетом предварительного воспламенения смеси от электрической искры (точка с'), происходит более раннее повышение давления, несовпадающее с давлением чистого процесса сжатия. В соответствии с этим давление при положении поршня в ВМТ будет несколько выше. Процесс сгорания происходит при изменяющемся объеме и протекает по кривой C " Z д , а не по C Z - как принято для двигателей с подводом теплоты при постоянном объеме и по прямым C Z ' и Z ' Z , для дизельного двигателя со смешанным подводом теплоты. Для переноса значений давления газовых сил на поршень из координат P - V в координаты P – φ индикаторной диаграммы, необходимо продолжить горизонтальную линию значения атмосферного давления Ро вправо по горизонтали до конца рабочего поля листа. С переносом нулевой линии на линию атмосферного давления, тем самым нам автоматически предоставляется выполнить вычитание значения атмосферного давления Ро из абсолютного значения давления в объеме цилиндра и по ординате получить окончательное значение ΔРг. Рисунок 4 - Индикаторная диаграмма дизельного двигателя Отступив справа от рисунка индикаторной диаграммы 15-20 мм, обозначаем точкой «0» на линии атмосферного давления начало координат P – φ. Принимаем нанесенную линию атмосферного давления за горизонтальную ось и нулевую линию индикаторной диаграммы в координатах ΔРг – φ, графика изменения избыточного давления газа в объеме цилиндра по углу поворота коленчатого вала. Для этого через каждые 15 мм по горизонтальной оси наносим шкалу значений угла поворота коленчатого вала от нуля «0» через 30 градусов п. к. в. до 720 градусов п. к. в., что соответствует двум оборотам коленчатого вала от ВМТ и длительности рабочего цикла. По оси ординат из точки «0» начала координат P – φ проводим вертикальную линию и наносим шкалу изменения сил давления газов ΔРг. Масштаб сил давления газов сохраняем такой же, что и для индикаторной диаграммы представленной в координатах Р-V, начиная от линии Ро. После нанесения осей координат P – φ , переходим к переносу значений давления индикаторной диаграммы, представленной в координатах Р-V, в координаты P – φ. Последовательно, начиная с точки 1' и далее 2', 3', 4', ...7' проводим вертикальные линии вверх до пересечения с линией давления на индикаторной диаграмме в координатах Р-V и переносим их значения по горизонтали до пересечения с вертикальными линиями соответствующих значений угла поворота коленчатого вала. От точки 1' вверх проводим прямую линию до пересечения с кривой линии индикаторной диаграммы в координатах Р-V. С точки их пересечения проводим горизонтальную линию до ординаты соответствующей нулю градусов п. к. в., в координатах P – φ. Далее из точки 2' , соответствующей 30 о п.к.в., из точки 3', соответствующей 60 о п.к.в., и так далее до конечного значения 720оп.к.в. Соединив плавной линией точки изменения давления получим развернутую индикаторную диаграмму давления в объеме цилиндра и диаграмму удельных газовых сил в координатах P – φ. Для определения численных значений газовых сил действующих на поршень, определяем значения ординаты ΔРг, для каждого положения поршня и угла поворота коленчатого вала, на поле индикаторной диаграммы в координатах ΔРг – φ. Значения определяются расчетным путем или прямым измерением от линии атмосферного давления, горизонтальная линия оси абсцисс координат ΔРг – φ, до линии отражающей изменение давления газов по индикаторной диаграмме. Полученные значения в мм заносятся в массив результатов измерений ординат ΔРг в мм, таблица 4, как исходных данных для определения численного значения ΔРг в МПа и суммарной силы, приложенной к оси поршневого пальца КШМ, Численное значение удельной газовой силы действующей на каждый момент положения коленчатого вала определится как произведение Рг i p , (26) где Yi - текущее значение ординаты давления для каждого положения коленчатого вала через 30о п.к.в., принимаем из массива измерений ординат в мм, таблица 4 μр - масштаб давления газов, МПа/мм. Определите значения ΔРг в МПа. Значения занесите в общую таблицу результатов динамического расчета, таблица 5. В качестве примера приведите численное решение уравнения (26) для двух – трех значений угла п. к. в. Второй основной силой, как упоминалось ранее, является удельная сила инерции - Pj. Для возвратно-поступательно движущихся масс - mj ее значение определяем по зависимости: Pj m j R кр 2 (cos cos 2) / Fn (27) 2 Значение выражения m j R кр / Fn остается постоянным для заданного расчетного режима по частоте вращения коленчатого вала, ω = const. Определите это значение. Тогда значения Pj по характеру и конечному значению для каждой точки будут изменяться только в зависимости от линейной скорости поршня при соответствующем угле поворота коленчатого вала и согласно тригонометрической зависимости (cosφ+λ·cos2φ). Значения тригонометрической зависимости через 10 0 угла поворота коленчатого вала -(cosφ+λ·cos2φ) приведены в приложении Б. Выполнив математические действия для определения Pj, значения заносим в общую таблицу результатов динамического расчета, таблица 5. Перенесите значения удельных сил инерции возвратно-поступательно движущихся масс на поле, где представлена индикаторная диаграмма газовых сил в координатах P–φ. Газовая сила и сила инерции возвратно-поступательно движущихся масс приложены к центру оси поршневого пальца и совместным усилием с учетом направления определяют суммарную удельную силу, которая равна для каждого данного угла поворота кривошипа сумме удельных сил давления газов ΔРг и сил инерции Pj: P Pr () Pj() (28) Просуммировав значения Pr () Pj() для каждого значения угла п.к.в., заносим в общую таблицу результатов динамического расчета, таблица 5 . По данным расчета суммарной удельной силы, на поле сил давления газов ΔРг и сил инерции Pj, в координатах ΔРг–φ, постройте графическую кривую суммарной удельной силы по углу поворота коленчатого вала, рисунок 7. Суммарная удельная сила РΣ приложенная к оси поршневого пальца, раскладывается на две составляющие силы, рисунок 3: - боковую силу PN, действующую в направлении стенки цилиндра перпендикулярно оси поршневого пальца и плоскости стенки цилиндра; - продольную силу PS, действующую в направлении продольной оси шатуна. Ð,Ì Ï à zz Ä 8,0 Èí äèêàò î ðí àÿ äèàãðàì ì à ðàáî ÷åãî öèêëà äâèãàò åëÿ Ð, Ì Ï à 8,0 Äèàãðàì ì à ô àç ãàçî ðàñï ðåäåëåí èÿ 7,0 7,0 5Å 5Å 6,0 6,0 r' ñ" a' 5,0 4,0 5,0 1 ñ 2 ñ' Ãðàô èêè äèí àì è÷åñêèõ ñèë äåéñò âóþù èõ â ýëåì åí ò àõ ÊØÌ Ðã - ãàçî âûå ñèëû Ðj - èí åðöèî í í ûå ñèëû Ð- ñóì ì àðí àÿ ñèëà 4,0 D Pã a" b' 3,0 2,0 40Å 3,0 2,0 38Å Ð 1,0 Ðî 1,0 Vc r r' A a' 690 330 720 360 0 b' 0 a Vh 660 300 630 270 620400 b b" 0 0 B V(S,ì ì ) 570 210 540 180 - 1,0 Ð, Ì Ï à 150 510 30 390 60 420 R /2 120 480 90 450 30 60 90 120 150 180 210 240 270 300 330 360 390 420 450 480 510 540 570 600 630 660 690 720 jÅ Ðj Рисунок 5 - Развертка индикаторной диаграммы и построение графиков сил давления газов- ΔРг, сил инерции - Pj и суммарной силы - РΣ Текущее значение боковой силы PN = f(φ) определяется из зависимости: 1 PN P tg P , МПа. cos (29) Текущее значение продольной силы PS=f(φ) определяется произведение суммарной силы на тригонометрическую функцию (1 / cosβ): 1 , МПа PS P cos как - (30) Результаты расчетов заносим в общую таблицу результатов динамического расчета, таблица 5. По результатам расчетов на отдельном поле, ниже поля расположения сил ΔРг, сил инерции Pj и суммарной силы РΣ, постройте графики изменения боковой силы – N и продольной силы-S по углу поворота коленчатого вала, рисунок 8. Продольная, сила РS, перенесенная по линии ее действия в центр шатунной шейки коленчатого вала распределяется на нормальную силу РК, действующую по оси радиуса кривошипа и тангенциальную силу РТ, действующую по касательной к окружности радиуса кривошипа и перпендикулярно оси кривошипа. Текущее значение нормальной силы РK = f(φ) определяется из зависимости: cos( ) (1 cos 2) PК P P cos k sin , МПа 2 cos (31) Текущее значение тангенциальной силы РТ = f(φ) определяем из зависимости: sin( ) sin 2 РТ Р P sin k cos , МПа. (32) 2 cos Третьей основной силой, которая также входит в состав сил определяющих общую нагрузку на элементы КШМ, является центробежная сила вращающихся масс кривошипно-шатунного механизма. Эта сила всегда направлена по радиусу кривошипа, постоянна по величине, противоположно направлена положительной нормальной силе и приложена к центру В шатунной шейки кривошипа. Ее значение зависит от значения радиуса кривошипа Rкр, значения угловой скорости и массы вращающихся деталей mR. Ð, Ì Ï à Áî êî âàÿ ñèëà N è ï ðî äî ëüí àÿ ñèëà S 8,0 7,0 6,0 5,0 Ps 4,0 3,0 2,0 1,0 Pn 0 0 30 60 90 120 150 180 210 240 270 300 330 360 390 420 450 480 510 540 570 600 630 660 690 720 jÅ 540 570 600 630 660 690 720 jÅ - 1,0 è ò àí ãåí öèàëüí àÿ ñèëà Ò Í î ðì àëüí àÿ ñèëà Ê Ð, Ì Ï à 7,0 6,0 Pk 5,0 4,0 3,0 2,0 Pò 1,0 0 0 30 60 90 120 150 180 210 240 270 300 330 360 390 420 450 480 510 - 1,0 Рисунок 6 – Графики продольной силы - РS, боковой силы - N, нормальной силы - К и тангенциальной силы - Т Постоянное по величине значение центробежной силы от вращающихся масс определяется из зависимости: K R mR R кр 2 , кН. (33) Центробежная сила инерции вращающихся масс от нижней части шатуна, отнесенной к вращающимся массам, равна: KRШ mRШRкр2 , кН Центробежная определяется как: сила инерции вращающихся K RK m K R кр 2 (34) масс кривошипа , кН (35) Определите их значения, в дальнейшем эти силы инерции вращающихся масс будут использоваться при построении полярной диаграммы нагрузки на шатунную шейку и учитываться при построении условной диаграммы износа шатунной шейки.