Лабораторная работа № 4 Вынужденные колебания линейного
advertisement

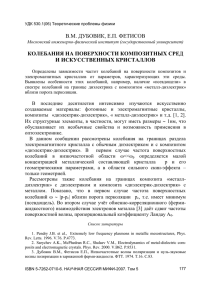
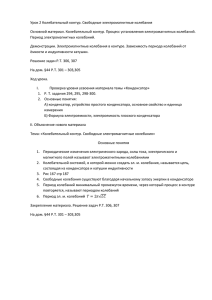
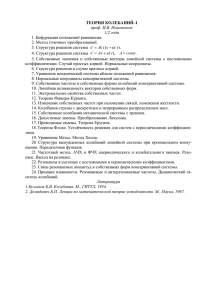
Лабораторная работа № 4 Вынужденные колебания линейного осциллятора Студент гр. 1538 Луковский Игорь Работа выполнена: 10.05.09 Отчет представлен: 20.05.09 Цели работы: Изучить закономерности установившихся вынужденных колебаний линейного механического осциллятора при синусоидальном возбуждении. Исследовать резонансные зависимости амплитуды и фазы установившихся вынужденных колебаний от частоты вынуждающей силы. Исследовать превращения энергии при вынужденных колебаниях осциллятора. Изучить переходные процессы установления вынужденных колебаний при резонансе и вдали от резонанса. Теория Определения: Опр. 1: Колебания называют вынужденными, когда осциллятор подвергается внешнему периодическому воздействию, которое приводит к появлению в дифференциальном уравнении системы дополнительного члена в виде заданной периодической функции времени. Опр. 2: Явление, при котором сравнительно слабое периодическое внешнее воздействие может вызвать чрезвычайно сильную реакцию осциллятора, называется резонансом. Физическая система: В данной работе изучается движение линейного механического осциллятора под действием синусоидальной вынуждающей силы – вынужденные колебания. Модель представляет собой торсионный осциллятор – уравновешенный инертный маховик на упругой спиральной пружине. Второй конец пружины связан с шатуном, совершающим колебания вокруг той же оси по закону =0sin(t). Такой способ возбуждения называется кинематическим. Уравнение колебаний: Пусть возбуждающий шатун принудительно совершает гармонические колебания около среднего положения с некоторой амплитудой 0 и угловой частотой , угол его отклонения (t ) зависит от времени по закону: (t ) 0 sin t (1) Если в некоторый момент времени t маховик отклонен от среднего положения на угол , а стержень в этот момент смещен на угол , то со стороны пружины действует момент сил D( ) D D0 sin t . Поэтому уравнение основного закона динамики для вращательного движения маховика с моментом инерции J в отсутствие трения имеет вид: J D D0 sin t (2) Уравнение (2) можно рассматривать и как дифференциальное уравнение вынужденных колебаний торсионного пружинного осциллятора под действием приложенного к нему заданного внешнего момента D0 sin t , изменяющегося синусоидально с частотой амплитудой D 0 . и постоянной Разделив обе части уравнения (1) на момент инерции J и введя обозначение 0 D / J для частоты собственных колебаний, перепишем уравнение в канонической форме: 02 020 sin t (3) При наличии вязкого трения, пропорционального скорости, в уравнении движения появляется тормозящий момент силы трения, пропорциональный . Получаем: 2 02 02 0 sin t (4) где постоянная затухания характеризует интенсивность вязкого трения. Иногда удобно использовать безразмерную величину Q, называемую добротностью и определяемую соотношением: Q 0 / 2 . Таким образом, вынужденные колебания осциллятора описываются неоднородным линейным дифференциальным уравнением второго порядка (содержит в правой части внешнюю силу, в виде функции времени). Принцип суперпозиции: При одновременном воздействии нескольких вынуждающих внешних сил вызываемые ими вынужденные колебания складываются. Из принципа суперпозиции также следует, что линейный осциллятор наряду с вынужденными колебаниями под действием внешней силы может совершать одновременно и затухающие собственные колебания. В последнем случае правая часть уравнения (3) равна нулю. Процесс установления вынужденных колебаний после изменения возбуждающей силы, пока вынужденные колебания обретают частоты внешней силы и постоянную амплитуду, называется переходным процессом. Длительность переходного процесса определяется времени затухания собственных колебаний, которые происходили бы в этой системе после начального возбуждения в отсутствии внешнего воздействия: 1 / . Установившиеся вынужденные колебания: Спустя некоторое время после включения синусоидальной внешней силы (на протяжении переходного процесса), колебания осциллятора приобретают стационарный характер, и он совершает незатухающие синусоидальные колебания на частоте внешнего воздействия – установившиеся вынужденные колебания. Эти колебания описываются периодическим частным решением неоднородного дифференциального уравнения (4): (t ) a sin( t ) (5) где a – значение амплитуды а - сдвиг фаз между колебаниями ротора осциллятора и возбуждающего шатуна. Величины a и зависят от близости частоты внешнего воздействия к собственной частоте осциллятора 0 . Зависимости a ( ) и ( ) от частоты внешнего воздействия называют соответственно амплитудно-частотной и фазо-частотной характеристиками осциллятора. При слабом трении ( 0 ) зависимость амплитуды вынужденных колебаний от частоты имеет ярко выраженный резонансный характер – амплитуда резко возрастает при приближении к собственной частоте 0 . График зависимости амплитуды установившихся колебаний от частоты резонансной кривой. называют Колебания в отсутствии трения заметно отличается от собственной частоты 0 , можно пренебречь влиянием трения на амплитуду a и фазовый сдвиг установившихся Когда частота вынуждающей силы вынужденных колебаний, т.е. можно воспользоваться моделью системы, в которой трения полностью отсутствует. Таким образом, для описания установившихся колебаний в случае, когда | 0 | , можно воспользоваться уравнением (3). Периодическое частное решение этого уравнения, описывающее установившиеся вынужденные колебания, можно попытаться искать в виде: (t ) a sin t (6) подставляя это выражение в уравнение (3), находим, что (6) дает решение уравнения (3), если амплитуда a ( ) как функция частоты имеет вид: 020 a( ) 2 0 2 (7) равна нулю, выражение (7) возвращает a 0 : маховик покоится в смещенном положении равновесия. Когда 0 , из (7) получаем a 0 : при очень Если частота медленном движении шатуна маховик квазистатически следует за ним, оставаясь все время в положении равновесия, которое смещается поочередно вправо и влево вместе с шатуном. При 0 значение a становится отрицательным (из (7)). Это означает, что при 0 установившиеся вынужденные колебания происходят в противофазе с внешней силой: маховик поворачивается в противоположную сторону к направлению кручения маховика и оба одновременно достигают своих крайних положений. Для этого случая решение можно записать в форме (5), сохраняя положительные значения a для всех частот: под a в (5) нужно понимать модуль правой части выражения (7), а сдвиг фаз положить равным нулю при 0 и при 0 . Резонансные кривые Вблизи резонанса (в области частот удовлетворяющих условию | 0 | ) , необходимо учитывать трение в дифференциальном уравнении вынужденных колебаний, т.е. нужно решать уравнение (4). Установившиеся вынужденные колебания описываются его периодическим частным решением. Его можно искать в виде (5). Для определения a и используются векторные диаграммы. В итоге получим: a ( ) 02 0 ( 02 2 ) 2 4 2 2 , tg ( ) 2 2 (8) 2 0 рис 1. Резонансные кривые линейного осциллятора. На графике показаны зависимости амплитуды от частоты a ( ) для некоторых значений добротности (в левой верхней части графика) (по оси абсцисс выложена вынуждающая частота в единицах собственной частоты 0 , а по оси ординат – отношение амплитуды маховика к амплитуде вынуждающего шатуна a( ) / 0 ). Амплитуда установившихся колебаний достигает максимального значения на резонансной частоте res : res 02 2 2 (9) последнее выражение справедливо для res справедливо, если трение не слишком велико, а именно, если 0 2 . При малом трении, когда 0 или Q 1 , из (9) находим приближенное выражение: res 0 1 2 2 02 2 1 0 1 2 0 1 2 4Q 0 (10) Из (10) видно, что при малом трении резонансная частота практически совпадает с собственной частотой осциллятора в отсутствии трения 0 . Амплитуда установившихся вынужденных колебаний на резонансе определяется следующим выражением: a max 020 2 02 2 0 0 Q 0 2 (11) Из (11) видно, что резонансная амплитуда a max установившихся колебаний приблизительно в Q раз больше амплитуды 0 вынуждающего шатуна (не при слишком малых Q). Резонанс угловой скорости При установившихся колебаниях под действием синусоидальной внешней силы угловая скорость маховика a cos(t ) изменяется со временем также по гармоническому закону вынуждающей силы. Выражение для амплитуды угловой скорости отличается от a ( ) (8) дополнительным множителем : с частотой ( ) a ( ) 02 0 ( 02 / ) 2 4 2 (12) Из (12) следует, что максимум резонансной кривой для скорости расположен точно при 0 для любых значений постоянной затухания . Резонансные кривые скорости для нескольких значений добротности приведены в правой верхней части рисунка 1. В правой нижней части показаны кривые зависимости сдвига фаз между колебаниями угловой скорости маховика и колебаниями шатуна. Энергетические превращения В отличие от случая собственных колебаний, полная энергия осциллятора испытывает колебания. Эти колебания происходят с частотой, вдвое превышающей частоту внешнего воздействия. При динамическом возбуждении внешний момент сил приложен непосредственно к маховику осциллятора. Поскольку один коней пружины закреплен неподвижно, деформация пружины, а, следовательно, и потенциальная энергия, полностью определяются углом отклонения маховика от среднего положения: E pot 1 1 1 D 2 (t ) Da 2 sin 2 (t ) J 02 a 2 [1 cos 2(t )] 2 2 4 Кинетическая энергия осциллятора не зависит от способа возбуждения и дается следующим выражением: (13) E kin 1 1 1 J (t ) J 2 a 2 cos 2 (t ) J 2 a 2 [1 cos 2(t )] 2 2 4 (14) Отношение максимальных (и средних) значений энергий равно квадрату отношения собственной частоты к частоте вынужденной силы: E pot E kin 02 2 (15) При 0 в среднем преобладает потенциальная энергия, в случае обратного неравенства преобладает кинетическая энергия. При кинематическом возбуждении колебаний вместе с шатуном перемещается положение равновесия осциллятора и вся его потенциальная яма в целом. Деформация пружины определяется в этом случае разностью углов (t ) и (t ) . Выражение для её потенциальной энергии принимает вид: E pot 1 D( ) 2 2 (16) При малом трении ( 0 ) , для отношения средних (и максимальных) значений потенциальной и кинетической энергии в случае кинематического возбуждения колебаний из формулы (16) для E pot , а также приведенных выражений (1) для (t ) и (5) для (t ) можно получить: E pot E kin 2 02 (17) Оказывается, что при кинематическом и прямом силовом возбуждении вынужденных колебаний соотношение между средними значениями кинетической и потенциальной энергии прямо противоположное. Поглощаемая и рассеиваемая осциллятором мощность. Лоренцевский контур Мощность, рассеиваемая (превращаемая в теплоту ) осциллятором при установившихся вынужденных колебаниях. Определяется работой, совершаемой моментом силы вязкого трения в единицу времени: Pрасс N тр 2 J 2 2 J 2 a 2 cos 2 (t ) (18) где амплитуда a и сдвиг фаз определяются выражениями (8). Усредняя рассеиваемую мощность по периоду колебаний, получаем: Ppacc 0402 J a J ( 02 2 ) 2 4 2 2 2 2 2 (19) Поглощаемая осциллятором мощность определяется совершаемой в единицу времени работой приложенного к шатуну момента внешней силы. Если не принимать во внимание момент инерции шатуна (считать его малым по сравнению с моментом инерции маховика), то внешний момент равен упругому моменту деформированной пружины: N в неш D( ) J 02 ( ) . Умножим этот момент на угловую скорость шатуна 0 cos t , предварительно подставив в него (t ) a sin( t ) и (t ) 0 sin( t ) , получим мгновенное значение передаваемой осциллятору мощности. Усредняя полученное выражение по периоду колебаний, получим: 1 Pпогл J 02 a sin 2 (20) Переходные процессы Амплитуда и фаза установившихся вынужденных колебаний не зависят от начальных условий. Начальные условия, т. е. угол отклонения (0) и угловая скорость (0) в момент t 0 включения внешнего воздействия, сказываются только во время переходного процесса установления колебаний. Общее решение неоднородного уравнения (4) можно записать в виде: (t ) a sin( t ) Ce t cos(1t ) (21) где значения постоянных C и определяются из начальных условий. То есть, переходный процесс описывается суперпозицией синусоидальных колебаний неизменной амплитуды a на частоте внешнего воздействия , и затухающих колебаний на частоте 1 с экспоненциально убывающей амплитудой. Условия отсутствия переходного процесса Для того, чтобы переходный процесс совсем отсутствовал необходимо, чтобы начальная амплитуда C вклада собственных колебаний в общее решение (21) была равна нулю. Это произойдет, если начальное отклонение (0) будет равно a sin , начальная скорость (0) равна a cos , где a и - амплитуда и фаза установившихся колебаний, определяемые формулами (8). При таких условиях C 0 , т.е. после включения внешнего воздействия колебания на собственной частоте вообще не возникают, и с самого начала происходят вынужденные колебания неизменной частоты и амплитуды. Резонансная раскачка осциллятора Рассмотрим переходный процесс при нулевых начальных условиях, т.е. при раскачке внешней периодической силой осциллятора, находившегося до её включения в состоянии покоя в положении равновесия: ( 0) 0 , (0 0) (22) В начальный момент времени шатун, раскачивающий осциллятор, начинает двигаться из своего среднего положения по закону: (t ) 0 sin t (23) При малом трении ( 0 ) , и синусоидальной внешней силе, настроенной на резонанс, т.е. на частоту собственных колебаний осциллятора 1 0 . Из (8) следует, что периодическое частное решение, описывающее установившиеся колебания, при 0 имеет вид: (t ) 0 0 sin( 0 t ) Q0 cos 0 t 2 2 (24) Прибавим к периодическому частному решению (24) общее решение однородного уравнения с 1 0 , получим: (t ) Q0 cos 0 t Ce t cos( 0 t ) (25) постоянные C и определяем так, чтобы для (t ) в (25) выполнялись начальные условия (22). В рассматриваемом случае трение слабо, поэтому экспоненциальный множитель почти не изменяется и его можно считать константой. Тогда, при дифференцировании получим: (t ) Q 0 0 sin 0 t Ce t 0 sin( 0 t ) (26) Тогда из начального условия (0) 0 находим 0 , а из условия (0) 0 получаем C Q0 . Таким образом, при Q 1 и 0 решение дифференциального уравнения (5), удовлетворяющее нулевым условиям, имеет вид: (t ) Q 0 (1 e t ) cos 0 t b(t ) cos 0 t (27) где b(t ) Q 0 (1 e t ) (28) При слабом трении продолжительность резонансной раскачки составляет много периодов колебаний. Рост амплитуда на начальном этапе раскачки происходит почти по линейному закону. Разлагая экспоненту в степенной ряд и ограничиваясь линейным по t членом, получаем: b(t ) Q 0 (1 e t ) 0 1 0 (1 e r ) 0 0 t 2 2 (29) Чтобы получить общее решение уравнения (4), с двумя произвольными постоянными, мы должны добавить ещё общее решение однородного уравнения, которое описывает в данном случае незатухающие собственные колебания. Определяя произвольные постоянные из начальных условий, получаем: 1 2 (t ) 0 (sin 0 t 0 t cos 0 t ) где амплитуда этого колебания с частотой 0 равна (30) 1 1 0 ( 0 t ) 2 1 0 0 t . 2 2 Переходные процессы вблизи резонанса Если частота вынуждающего внешнего воздействия близка к частоте собственных затухающих колебаний осциллятора, то в переходном процессе установления колебаний, пока собственные колебания не затухли, происходит сложения колебаний с близкими частотами и 1 . Так как трение мало, в дальнейшем различия между частотами 0 и 1 делать не будем. Такое наложение колебаний порождает модулированное колебание, т.е. почти синусоидальное колебания со средней частотой, амплитуда которого медленно поочередно возрастает и убывает со сравнительно низкой частотой биений | 0 | , равной модулю разности собственных колебаний и вынуждающих частот. Сначала вынуждающая сила раскачивает осциллятор до амплитуды, превышающей установившееся значение. Затем разность фаз, накопившаяся между колебаниями маховика и шатуна, приводит к обратной передаче энергии от осциллятора к источнику внешнего воздействия, и амплитуда начинает убывать. Дальнейшее изменения разности фаз снова приведет к росту амплитуды, которое через некоторое время опять сменится убыванием, и так далее. При наличии трения эти процессы модуляции, т.е. чередования медленного роста и убывания амплитуды (переходные биения) становятся все менее выраженными по мере затухания вклада колебаний на собственной частоте. В отсутствии трения вклад колебаний на собственной частоте не затухает, и не протяжении переходного процесса происходит сложения двух близких по частоте гармонических колебаний с неизменными амплитудами. Постепенно затухающие переходные биения в переходном процессе вблизи резонанса (при нулевых начальных условиях). Переходные процессы вдали от резонанса Рассмотрим случаи, когда частота внешнего воздействия значительно отличается от собственной частоты осциллятора. рис 1. Графики угла отклонения и угловой скорости ротора в переходном процессе при низкой частоте возбуждения ( 0 ) . Если внешняя частота много меньше собственной частоты ( 0 ) , положение равновесия осциллятора мелено смещается вместе с шатуном поочередно вправо и влево, а ротор совершает около такого медленно движущегося положения равновесия сравнительно быстрые постепенно затухающие колебания на собственной частоте. В результате, на медленные установившиеся колебания неизменной амплитуды накладываются искажающие их быстрые собственные колебания постепенно уменьшающейся амплитуды (пример показан на рис.1). В противоположном случае высокой частоты принудительного движения шатуна на протяжении переходного процесса быстрые вынужденные колебания неизменной амплитуды происходят около некоторого движущегося среднего положения. Оно, в свою очередь, совершает медленные затухающие колебания на собственной частоте осциллятора (пример показан на рис.2: также представлены графики составляющих быстрых вынужденных синусоидальных колебаний неизменной амплитуды и медленных затухающих собственных колебаний). рис2. Графики угла отклонения и угловой скорости ротора в переходном процессе при высокой частоте возбуждения ( 0 ) . Фазовая траектория переходных процессов и сечения Пуанкаре Уравнение движения (4). Описывающее вынужденные колебания, содержит время t явным образом: в правую часть этого уравнения входит заданная функция времени (t ) 0 sin t , описывающее принудительное периодическое движение возбуждающего шатуна. Поэтому механическое состояние рассматриваемой физической системы определяются тремя переменными: , и t . Для полной графической характеристики механического состояния такой системы двумерное пространство, т.е. плоскость ( , ) , целесообразно дополнить ещё одним (третьим) измерением – осью времени t , направленной перпендикулярно к фазовой плоскости. В моделирующей компьютерной программе на плоскости ( , ) , отображается проекция трехмерной фазовой траектории вынужденных колебаний осциллятора. Наглядное представление о характере переходного процесса в целом можно получить, если на этой двумерной проекции фазовой траектории выделить точки, соответствующие равноотстоящим моментам времени, разделенным интервалами, равными периоду внешнего воздействия 2 / , например, моментам времени, когда шатун проходит через свое среднее положение. Это так называемые сечения Пуанкаре. рис3. Проекции фазовых траекторий с сечениями Пуанкаре для процесса резонансной раскачки осциллятора из состояния покоя (слева) и для переходных биений при 0.8 0 (справа). Ответы на вопросы для самоконтроля 1. Для изучения вынужденных колебаний линейного осциллятора при синусоидальном периодическом внешнем воздействии рассматривается механический торсионный пружинный осциллятор, подобный балансовому механизму механических карманных или наручных часов. Упругая спиральная пружина, прикрепленная к ротору (маховику), обеспечивает ему устойчивое положение равновесия. Осциллятор характеризуется моментом инерции I маховика, модулем кручения (жесткостью) D пружины и добротностью Q (при наличии вязкого трения). Второй конец пружины соединен с шатуном, который можно поворачивать вокруг оси, общей с осью маховика. Поворот шатуна на некоторый угол смещает положение равновесия маховика на такой же угол. При неподвижном шатуне осциллятор может совершать около (смещенного) положения равновесия затухающие собственные колебания. В случае слабого (и умеренного) трения частота этих крутильных колебаний почти совпадает с частотой ω0 собственных колебаний в отсутствие трения, зависящей от жесткости D пружины и момента инерции I маховика: ω02= D/I. При заданном периодическом движении шатуна ротор совершает вынужденные колебания. Такой способ возбуждения вынужденных колебаний можно назвать кинематическим, потому что внешнее воздействие выражается в заданном движении некоторой части системы, в противоположность силовому (или динамическому) возбуждению, для которого характерно явное задание действующей на систему внешней силы как функции времени. 2. Математическая модель осциллятора, используемая в лабораторной работе, полностью определяется заданием единственного безразмерного параметра – добротности Q = ω0/2γ , характеризующей затухание собственных колебаний. Математическая модель определяется меньшим числом параметров, чем физическая система, по следующим причинам. Во-первых, такие физические параметры как модуль кручения пружины D и момент инерции маховика I во все соотношения входят в виде отношения D/I, которое представляет собой квадрат угловой частоты собственных колебаний: ω02 = D/I. Поэтому через отношение D/I выражается период собственных колебаний в отсутствие трения: T0 = 2π /ω0 = 2π I/D. Но при моделировании этот период служит естественной единицей времени, поэтому при задании параметров модели нет необходимости вводить значение периода T0. Параметры, характеризующие внешнее воздействие – это угловая амплитуда и угловая частота принудительного движения шатуна. В принятой математической модели частота внешнего воздействия выражается в безразмерном виде (в единицах частоты собственных колебаний). 3. Помимо угла отклонения и угловой скорости ротора, т.е. тех переменных, которые характеризуют механическое состояние осциллятора при собственных колебаниях, здесь в число переменных, определяющих состояние, нужно включить еще мгновенное значение фазы внешнего синусоидального воздействия (или явно время). Таким образом, для задания состояния нужно указать значения трех переменных. В этом смысле можно говорить, что осциллятор, подверженный действию периодической внешней силы, имеет полторы степени свободы. 4. Для вывода дифференциального уравнения вынужденных крутильных колебаний торсионного осциллятора можно, как и в случае собственных колебаний (лабораторная работа 1), воспользоваться динамическим законом вращения твердого тела вокруг фиксированной оси: D( ( t )) . Действующий на маховик момент силы упругости пружины пропорционален I мгновенному значению угла, на который она закручена относительно своего недеформированного состояния, а этот угол в данном случае равен разности между углом φ отклонения маховика и углом отклонения возбуждающего шатуна. Последний заданным образом (как sinωt) зависит от времени. Вводя обозначение ω02 = D/I для собственной частоты и добавляя еще момент силы вязкого трения, пропорциональный угловой скорости, получаем следующее 2 02 020 sin t . Отличие от уравнения собственных колебаний линейное уравнение: заключается в том, что данное уравнение неоднородное: в правой его части присутствует член, который явно зависит от времени и выражает периодическое внешнее воздействие на осциллятор. 5. Общее решение неоднородного дифференциального уравнения, описывающего вынужденные колебания линейного осциллятора, можно представить в виде суммы общего решения соответствующего однородного уравнения и периодического частного решения неоднородного уравнения. Значения произвольных постоянных в общем решении для каждого конкретного случая находятся из соответствующих начальных условий, т.е. определяются механическим состоянием осциллятора в момент включения внешнего воздействия. Периодическое частное решение неоднородного уравнения имеет физический смысл установившихся вынужденных колебаний, происходящих на частоте внешнего воздействия. Общее решение однородного уравнения описывает входящие в состав переходного процесса затухающие колебания на собственной частоте. Так как эти колебания затухают, после завершения переходного процесса осциллятор будет совершать только установившиеся колебания неизменной амплитуды, описываемые периодическим частным решением неоднородного уравнения. 6. Установившиеся вынужденные колебания характеризуют поведение осциллятора спустя достаточно большое время после включения периодического внешнего воздействия (когда переходный процесс уже закончился). Это периодические колебания. Они происходят с периодом внешнего воздействия и имеют постоянную амплитуду. Поэтому их фазовая траектория представляет собой замкнутую кривую. В случае гармонического (синусоидального) внешнего воздействия установившиеся вынужденные колебания также будут синусоидальными, а их фазовая траектория – эллипс. На практике можно реализовать установившиеся колебания либо простым выжиданием, пока закончится переходный процесс, либо специальным образом задавая начальные условия (так, чтобы переходный процесс вообще не возникал, т.е. чтобы установившиеся колебания происходили сразу после включения внешнего воздействия). 7. Частота установившихся колебаний равна частоте внешнего воздействия и потому вообще не зависит от параметров осциллятора. Амплитуда и фаза установившихся колебаний зависят от собственной частоты осциллятора, частоты внешнего воздействия и добротности осциллятора. Амплитуда установившихся колебаний пропорциональна амплитуде внешнего воздействия. 8. Явление резонанса заключается в резком возрастании амплитуды установившихся колебаний (а также предаваемой осциллятору энергии и рассеиваемой им энергии) при приближении частоты внешнего воздействия к собственной частоте осциллятора. Резонанс скорости (и энергии) происходит при точном совпадении частоты возбуждения с собственной частотой осциллятора. Резонанс смещения наступает, когда частота возбуждения немного меньше собственной частоты осциллятора (отклонение резонансной частоты от собственной частоты возрастает с увеличением трения). 9. В отсутствие трения установившиеся вынужденные колебания маховика происходят в одинаковой фазе с принудительным синусоидальным движением возбуждающего шатуна, если частота возбуждения ниже собственной частоты осциллятора, и в противофазе, если частота возбуждения выше собственной частоты осциллятора. Это значит, что зависимость фазы установившихся колебаний от частоты возбуждения, т. е. фазо-частотная характеристика осциллятора, изображается функцией-ступенькой (ее значение равно 0 при ω < ω0 и –π при ω > ω0). При слабом трении установившиеся вынужденные колебания маховика также происходят практически в одинаковой фазе с шатуном при ω < ω0 (т.е. ниже резонанса) и в противоположной фазе при ω> ω0 (выше резонанса). Лишь в окрестности резонанса (при ω ≈ ω0) ступенька фазочастотной характеристики осциллятора слегка размывается из-за трения (тем сильнее, чем выше трение – ширина ступеньки на шкале частоты порядка постоянной затухания γ). При ω = ω 0 (резонанс скорости) колебания маховика отстают от возбуждающего шатуна ровно на четверть периода, т.е. сдвиг фаз равен –π/2. График зависимости амплитуды установившихся вынужденных колебаний от частоты возбуждения (амплитудно-частотная характеристика) при слабом трении имеет резкий максимум в окрестности собственной частоты осциллятора ω0 (резонанс). При очень низкой частоте возбуждения (при ω << ω0) амплитуда маховика почти совпадает с амплитудой возбуждающего шатуна. По мере роста частоты возбуждения амплитуда маховика растет, достигая при резонансе максимального значения, которое приблизительно в Q раз больше амплитуды колебаний возбуждающего шатуна (здесь Q = ω0/2γ добротность осциллятора). При дальнейшем увеличении частоты возбуждения амплитуда установившихся вынужденных колебаний уменьшается и асимптотически стремится к нулю при ω>>ω0. 10. Высота резонансного пика приблизительно в Q раз больше амплитуды шатуна. Поэтому максимум амплитуды установившихся колебаний пропорционален амплитуде возбуждения и добротности осциллятора. 11. При очень низкой частоте возбуждения (при ω<<ω0) амплитуда маховика почти совпадает с амплитудой возбуждающего шатуна, так как при медленном движении шатуна маховик практически безынерционно следует за ним, оставаясь все время вблизи дна потенциальной ямы, движущейся вместе с шатуном. 12. При точном совпадении частоты возбуждения с собственной частотой (при ω = ω0, т.е. при резонансе скорости) колебания маховика отстают от возбуждающего шатуна ровно на четверть периода, т.е. сдвиг фаз равен –π/2. Это значит, что угловая скорость ротора изменяется в одинаковой фазе с движением возбуждающего шатуна, чем обеспечиваются наиболее благоприятные условия для передачи энергии осциллятору на протяжении всего периода колебаний. 13. При резонансе амплитуда ротора достигает максимального значения, которое приблизительно в Q раз больше амплитуды колебаний шатуна (Q = ω0/2γ− добротность осциллятора). 14. Периодическое частное решение дифференциального уравнения вынужденных колебаний, полученное без учета трения, дает для зависимости амплитуды установившихся вынужденных колебаний от частоты возбуждения кривую, практически совпадающую с амплитудно-частотной характеристикой осциллятора со слабым (и умеренным) трением почти при всех частотах, кроме непосредственной окрестности резонанса. 15. При установившихся вынужденных колебаниях осциллятора, происходящих вдали от резонанса, осциллятор получает энергию от источника возбуждения на протяжении некоторой четверти цикла колебаний, а на протяжении следующей четверти цикла происходит обратная передача энергии от осциллятора к внешнему источнику. Возвращаемая источнику энергия меньше получаемой осциллятором на величину энергии, рассеиваемой осциллятором за половину периода из-за трения. В течение второй половины цикла возбуждения такие же превращения энергии повторяются еще раз. В условиях резонанса фазовые соотношения между колебаниями ротора и принудительным движением возбуждающего шатуна (момент внешнего воздействия все время совпадает с направлением вращения ротора) наиболее благоприятны для передачи энергии осциллятору. Энергия, получаемая осциллятором от внешнего источника на протяжении всего периода возбуждения, рассеивается из-за трения. 16. При собственных колебаниях линейного осциллятора средние за период значения кинетической и потенциальной энергий одинаковы. При вынужденных колебаниях соотношение средних значений двух видов энергии, вообще говоря, будет другим. Только в условиях резонанса вынужденные колебания в этом отношении похожи на собственные – средние значения кинетической и потенциальной энергий одинаковы, а роль внешнего возбуждения сводится к «подпитке» осциллятора энергией для компенсации потерь на трение. Но при отклонении от резонанса один из видов энергии становится преобладающим. В случае прямого силового возбуждения колебаний средние значения кинетической и потенциальной энергии относятся как квадраты частоты возбуждения и собственной частоты, т.е. ниже резонанса преобладает потенциальная энергия, а выше – кинетическая. В случае кинематического возбуждения колебаний соотношение средних значений кинетической и потенциальной энергии будет обратным: при низких частотах в среднем доминирует кинетическая энергия (ротор движется вместе с потенциальной ямой, находясь вблизи ее дна), а при высоких частотах доминирует потенциальная энергия. 17. Средняя мощность P, поглощаемая (и рассеиваемая) осциллятором, совершающим вынужденные колебания, максимальна в условиях резонанса (при ω = ω0). При отклонении частоты возбуждения от собственной частоты (при отклонении от резонанса) поглощаемая мощность уменьшается в соответствии с формулой P 1 Pmax . Здесь - время 2 2 1 ( 0 ) затухания собственных колебаний осциллятора. Выражающий эту зависимость график называют лоренцевским контуром (в классической электронной теории дисперсии, основанной на электронной теории Лоренца, для поглощающего свет атома используется модель заряженного осциллятора). 18. Длительность переходного процесса (процесса установления вынужденных колебаний) определяется в общем случае временем затухания собственных колебаний осциллятора 1/ . Для того, чтобы установившиеся колебания происходили сразу после включения внешнего воздействия (т.е. для того, чтобы не было переходного процесса), начальные условия нужно выбрать таким образом, чтобы начальное отклонение и начальная скорость имели значения, получаемые из периодического частного решения, описывающего установившиеся колебания, при подстановке в него t = 0. 19. При резонансной раскачке осциллятора (со слабым и умеренным трением) из состояния покоя в положении равновесия амплитуда растет монотонно от нуля до максимального значения, равного произведению амплитуды возбуждающего шатуна на добротность осциллятора. На начальном этапе амплитуда растет почти по линейному закону. Постепенно рост замедляется, и амплитуда асимптотически (экспоненциально) приближается снизу к значению, соответствующему установившимся колебаниям. 20. Да, может. Для того чтобы можно было наблюдать убывание амплитуды в условиях настройки в резонанс, нужно, чтобы при включении внешнего воздействия осциллятор уже совершал собственные колебания, причем фазовые соотношения между этими колебаниями и принудительным движением шатуна должны быть благоприятными для передачи энергии от осциллятора источнику возбуждения. Если возбуждающий шатун после включения возбуждения движется как sinωt, для наблюдения убывания амплитуды в моделирующем эксперименте нужно задать некоторое положительное начальное отклонение и нулевую начальную скорость. После уменьшения амплитуды до нуля установятся новые фазовые соотношения, благоприятные для передачи энергии осциллятору от источника возбуждения, и амплитуда начнет расти. 21. Когда частота возбуждения близка к собственной частоте, начальный этап раскачки осциллятора из состояния покоя в положении равновесия происходит почти так же, как и при резонансе. Но через некоторое время из-за несовпадения частоты возбуждения с собственной частотой фазовые соотношения между колебаниями ротора и шатуна изменяются на противоположные так, что начинает происходить обратная передача энергии от осциллятора к внешнему источнику, и амплитуда убывает. Затем из-за дальнейшего изменения фазовых соотношений убывание амплитуды снова сменяется ее ростом. Эти переходные биения постепенно затухают, и в конце концов устанавливаются колебания неизменной амплитуды. На спектральном языке возникновение переходных биений можно объяснить тем, что переходной процесс представляет собой наложение гармонических установившихся колебаний на частоте возбуждения и (постепенно затухающих) колебаний на собственной частоте осциллятора. При раскачке осциллятора из состояния покоя в положении равновесия на начальном этапе переходного процесса вклады собственных и вынужденных колебаний почти одинаковы. Сложение колебаний с близкими частотами дает биения, т.е. колебание на средней частоте с медленно изменяющейся амплитудой (модулированное колебание). Из-за затухания собственных колебаний в конце концов в этой суперпозиции «выживает» только вклад вынужденных колебаний. 22. Сечениями Пуанкаре называют точки фазовой траектории, изображающие состояние системы через одинаковые промежутки времени, равные периоду внешнего воздействия. В моделирующей программе это начальный момент и все последующие моменты времени, когда возбуждающий шатун проходит через свое среднее положение слева направо. Для установившихся колебаний все сечения Пуанкаре сливаются в одну точку фазовой плоскости, так как через каждый период состояние системы воспроизводится. Последовательность сечений Пуанкаре дает наглядное графическое представление о процессе установления колебаний в целом. По мере установления колебаний эти сечения постепенно сгущаются к одной точке, соответствующей установившимся колебаниям. 23. Электромагнитным аналогом механического осциллятора, совершающего вынужденные колебания, может служить колебательный контур из последовательно соединенных катушки индуктивности, конденсатора и резистора, на вход которого подается напряжение с синусоидальной зависимостью от времени. Заряд конденсатора служит аналогом угла отклонения ротора из среднего положения, а сила тока в контуре – аналогом угловой скорости ротора. Индуктивность катушки можно рассматривать как аналог момента инерции ротора, емкость конденсатора – как аналог жесткости упругой пружины, а резистор (вместе с активным сопротивлением катушки и соединительных проводов) – как аналог вязкой смазки в подшипниках ротора и окружающего ротор воздуха, которыми обусловлено вязкое трение, тормозящее движение ротора. Решение задач 1.6. Полуширина резонансной кривой. А) a a res 02 0 ( 02 2 ) 2 4 2 2 Q 0 1 Q (1 ( / 0 ) 2 ) 2 ( / 0 ) 2 / Q 2 ⟹ 2Q 2 2 2 (2Q 2 2 2 ) 2 4Q 2 2 (Q 2 2 1) 0 2Q 2 2 Подставляя значение 0.5 , получаем: / 0 2Q 2 1 12Q 2 1 рассмотрев разность соответствующих значений, имеем d Q 2 2Q 2 1 2Q Q 2 4 Q Поделив числитель и знаменатель на Q и раскладывая в ряд Тейлора по 1 / Q , имеем: d 2 1/ Q 2 2 1 4 / Q 2 2 1/ Q 2 2 4 / Q 2 3 / Q Б) Имеем резонансную частоту res 02 2 2 , откуда для того, чтобы резонансная частота была 0 необходимо Q 2 / 2 0.71 . 2.1 Условия отсутствия переходного процесса А) Уравнение установившихся колебаний: (t ) a 0 sin( t ) , где a и определяются из параметров осциллятора следующим образом (см. теоретическое введение): 2 / 0 1 ; a 0 . 2 Q(1 ( / 0 ) ) (1 ( / 0 ) 2 ) 2 ( / 0 ) 2 / Q 2 0 a cos 0 a( / 0 ) cos Подставляя t 0 , имеем 0 a sin ; arctg Б) Q / 0 0 ,° a, ° 0 , ° 5 25 25 1 0,5 1,5 15 15 15 75 20 12 -1,57 -0,05 0,10 -75 -1,06 1,15 0 0,17 -0,31