Гармонические колебания
advertisement

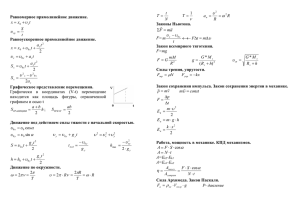
1 Гармонические колебания Колебаниями называются движения или процессы, которые характеризуются определенной повторяемостью во времени. Колебания называются свободными (собственными), если они совершаются за счет первоначально сообщенной энергии при последующем отсутствии внешних воздействий на колебательную систему. Гармонические колебания – колебания, при которых колеблющаяся величина изменяется со временем по закону синуса (косинуса). Колебания, встречающиеся в природе и технике, часто близки к гармоническим, различные периодические процессы можно представить как наложение гармонических колебаний. Гармоническое колебание описывается уравнениями типа x A cos(0 t ) или x A sin (ω0 t ) , где x – смещение от положения равновесия колеблющейся точки, A – амплитуда колебаний, ω0 - круговая (циклическая частота), - начальная фаза колебаний (определяет смещение колеблющейся величины от положения равновесия в начальный момент времени), (ω0t ) - фаза колебаний в момент времени t (определяет смещение колеблющейся величины от положения равновесия в данный момент времени). Период колебаний – это промежуток времени, за который происходит одно полное колебание (фаза колебания получает приращение 2π): 𝑇= 2𝜋 𝜔 (с) Величина, обратная периоду колебаний – частота, т.е. число колебаний, совершаемых системой в единицу времени: 1 𝒱 = (Гц) 𝑇 Скорость колеблющейся точки - первая производная по времени от гармонически колеблющейся величины х: 2 Ускорение колеблющейся точки - вторая производная по времени от гармонически колеблющейся величины х: d 2x a 2 A 02 cos( 0 t ) A 02 cos(t ) dt dx d 2x Амплитуда величин и соответственно равны dt dt 2 A 0 и A 0 . Фаза 2 dx dt dx d 2x отличается от фазы s на π/2, а фаза 2 отличается от фазы s на π, т.е. имеет dt dt наибольшие значения, когда х=0; когда же х достигает максимального d 2x отрицательного значения, 2 принимает наибольшее положительное значение. dt Из последнего уравнения следует дифференциальное уравнение гармонических колебаний: 𝑑2𝑥 + 𝜔02 𝑥 = 0 𝑑𝑡 2 Гармонические колебания изображаются графически методом вращающегося вектора амплитуды, или методом векторных диаграмм. Для этого из произвольной точки О, выбранной на оси х, под углом φ, равным начальной фазе колебания, ⃗ , модуль которого равен амплитуде А рассматриваемого откладывается вектор А колебания. Если вектор привести во вращение с угловой скоростью 𝜔0 , равной циклической частоте колебаний, то проекция конца вектора будет перемещаться по оси x и принимать значения от -А до +А, а колеблющаяся величина будет изменяться со временем по закону x A cos(0 t ) . 𝜔0 𝐴 φ O x Уравнение гармонического колебания можно записать и в комплексной форме: 𝑥 = 𝐴𝑒 𝑖(𝜔0 𝑡+𝜑) . 3 Кинетическая энергия колеблющейся точки массы m ; потенциальная П m A 2 02 cos 2 0 t ; 2 полная m A 2 02 E . 2 Гармонический осциллятор. Пружинный, математический и физический маятники. Гармоническим осциллятором называется система, совершающая колебания описываемые уравнением вида: 𝑑2𝑥 + 𝜔02 𝑥 = 0 𝑑𝑡 2 Пружинный маятник – груз массой m, подвешенный на абсолютно упругой пружине и совершающий гармонические колебания под действием упругой силы 𝐹 = −𝑘𝑥. Физический маятник – твердое тело, совершающее под действием силы тяжести колебания вокруг неподвижной горизонтальной оси, проходящей через точку О, не совпадающую с центром масс тела. Математический маятник – идеализированная система, состоящая из материальной точки массой m, подвешенной на нерастяжимой невесомой нити, и колеблющаяся под действием силы тяжести. 4 Описание колебаний маятников Система Пружинный маятник Закон движения, дифференциальное уравнение k x0 m или x 02 x 0 mx kx , x Решение Циклическая дифференциально частота, 0 го уравнения x A cos(0 t ) Перио д, Т 2 m k k m k – жесткость пружины, т – масса колеблющегося груза Математичес кий маятник M J F l mgl sin , 0 cos( 0 t ) 2 l g g l J mgl sin ; при малых колебаниях sin , J mgl ; J ml 2 , g 0 или l 02 0 M – момент возвращающей силы, J – момент инерции маятника, - угол отклонения маятника из положения равновесия, F mg sin - возвращающая сила, l – длина маятника, g – ускорение свободного падения, 0 - амплитуда (наибольший угол, на который отклоняется маятник из положения равновесия), m – масса маятника Физический M J F l mgl sin маятник , J mgl sin ; 0 cos( 0 t ) mgl J 2 J mgl при малых колебаниях sin , J mgl ; 02 0 M – момент возвращающей силы, J – момент инерции маятника относительно оси, проходящей через точку подвеса О, F mg sin - возвращающая сила, - угол отклонения маятника из положения равновесия, l=ОС – расстояние между точкой подвеса и центром масс маятника, 0 - амплитуда (наибольший угол, на который отклоняется маятник из положения равновесия), m – масса маятника, g – ускорение свободного падения. 5 Сложение гармонических колебаний одного направления и одинаковой частоты Сложение колебаний x1 A1 cos( 0 t 1 ), x2 A2 cos( 0 t 2 ) Уравнение результирующего колебания x x1 x2 A cos( 0 t ) Для сложения используется метод вращающегося вектора амплитуды Амплитуда результирующего колебания A2 A12 A22 2 A1 A2 cos( 2 1 ) Векторы A1 и A2 Начальная фаза вращаются с одинаковой угловой скоростью 0 , поэтому разность фаз 2 1 между ними остается постоянной tg A1 sin 1 A2 sin 2 A1 cos 1 A2 cos 2 Проанализируем выражение для амплитуды результирующего колебания. 1) (𝜑2 − 𝜑1 ) = ±2𝑚𝜋 результирующего (m=0,1,2,…), колебания тогда равна 𝐴 = 𝐴1 + 𝐴2 , сумме амплитуд т.е. амплитуда складываемых колебаний. 2) (𝜑2 − 𝜑1 ) = ±(2𝑚 + 1)𝜋 амплитуда (m=0,1,2,…) результирующего , колебания тогда равна 𝐴 = |А1 − А2 | , разности складываемых колебаний. Сложение взаимно перпендикулярных колебаний Складываемые колебания т.е. амплитуд 6 x A cos t , y B cos(t ) Складываются гармонические колебания одинаковой частоты 0 , совершающиеся во взаимно перпендикулярных плоскостях. А и В — амплитуды складываемых колебаний; начальная фаза первого колебания принята равной нулю; — разность фаз складываемых колебаний. Уравнение траектории результирующего колебания x 2 2 xy y2 cos 2 sin 2 . 2 A AB B Так как траектория результирующего колебания имеет форму эллипса, то такие колебания называют эллиптически поляризованными. Свободные затухающие колебанияКолебания, амплитуды которых из-за потерь энергии реальной колебательной системой с течением времени уменьшается. Дифференциальное уравнение затухающих колебаний x 2x 02 x 0 , где x – колеблющаяся величина, 𝛿 = 𝑐𝑜𝑛𝑠𝑡 – коэффициент затухания. t Решение дифференциального уравнения x A0 e cos(t ) , t Где A A0 e - амплитуда затухающих колебаний, А0 – начальная амплитуда, 0 - собственная частота колебательной системы. 7 Циклическая частота 02 2 Колебание x A0 e t cos(t ) не является периодическим, а тем более гармоническим. Однако в случае малого затухания ( 0 ) условно используют понятие периода затухающих колебаний (промежутка времени между двумя последовательными максимумами (или минимумами)). Период затухающих колебаний T 2 2 02 2 Характеристики затухающих колебательных систем Декремент затухания A(t ) e T , A(t T ) где А(t)и A(t+T) – амплитуды двух последовательных колебаний, соответствующих моментам времени, отличающимся на период. Время релаксации - промежуток времени, в течение которого амплитуда затухающих колебаний уменьшается в е раз. 1 Логарифмический декремент затухания ln A(t ) T 1 T , A(t T ) Ne где τ – время релаксации, Ne – число колебаний, совершаемых за время уменьшения амплитуды в е раз. Добротность колебательной системы Q N e 0. T0 2 2 2 Так как затухание мало ( 0 ), то Т принято равным Т0. 8 Вынужденные механические колебания Дифференциальное уравнение вынужденных колебаний: x 2x 02 x F0 cos t . m Решение дифференциального уравнения x A cos(t ) , где A Явление F0 m ( 02 2 ) 2 4 2 2 резкого , arctg возрастания 2 . 2 2 0 амплитуды вынужденных колебаний при приближении частоты вынуждающей силы к частоте, равной или близкой собственной частоте колебательной системы, называется резонансом. Резонансная частота рез 02 2 2 резонансная амплитуда A F0 2m 02 2 .