Большое количество людей с сахарным диабетом 2-го
advertisement

ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ АВТОНОМНОЕ
ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ
ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ
«НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ УНИВЕРСИТЕТ
«ВЫСШАЯ ШКОЛА ЭКОНОМИКИ»
Московский институт электроники и математики
Шубин Иван Павлович
Метод расширенной линеаризации в задаче стабилизации уровня глюкозы в крови
Выпускная квалификационная работа
студента образовательной программы бакалавриата
«Прикладная математика»
наименование образовательной программы
по направлению 01.03.04 Прикладная математика
шифр
наименование направления подготовки
Студент
И.П. Шубин
подпись
Рецензент
И.О. Фамилия
Научный руководитель
д.т.н., профессор,
В.И. Капалин
д.т.н., профессор,
В.Н. Афанасьев
И.О. Фамилия
И.О. Фамилия
Москва 2015 г.
1
Аннотация
На сегодняшний день, диабет является одной из главных проблем
здравоохранения в мире. И, хотя с диабетом можно бороться, медицинское
сопровождение крайне обременительно для больного. Один из способов решить эту
проблему – так называемая Искусственная Поджелудочная Железа.
В данной ВКР рассматривается построение гарантирующего метода
управления системой глюкоза-инсулин для пациентов с сахарным диабетом первого
типа, на основе метода расширенной линеаризации. В работе рассмотрены
несколько широко используемых математических моделей системы глюкозаинсулин, в частности, модель Бергмана, модель Стариса и модель Ховорки,
проведён их анализ, и для минимальной модели Бергмана построено гарантирующее
управление. Также рассмотрено поведение системы при возмущении.
Abstract
Diabetes is a major health issue in the world. And, whilst diabetes can be managed,
the treatment is extremely invasive. One of the ways to solve this problem is the concept
known as Artificial Pancreas.
In this paper, an optimal control design problem for artificial blood glucose control
for a type 1 diabetic is considered using method of Extended Linearization. A few widely
used mathematical models of glucose-insulin system is examined and analyzed, in
particular, minimal model of Bergman, Sturis model and Hovorka model, and for a
minimal model of Bergman, an optimal control is designed. Also system behavior under
disturbance is examined.
2
Оглавление
Введение ................................................................................................................... 4
Глава 1.Объект управления ......................................................................................... 7
1.1 Концепт Искусственной Поджелудочной Железы ............................................. 7
1.2 Модели гомеостаза глюкозы .............................................................................. 9
1.2.1 Модель Бергмана (Minimal Model of Bergman) .......................................... 11
1.2.2 Модель Стариса (Sturis model) .................................................................... 13
1.2.3 Модель Ховорки. (Hovorka model).............................................................. 14
1.3 Заключение........................................................................................................ 17
Глава 2. Постановка задачи управления ................................................................... 17
2.1 Математические основы ................................................................................... 18
2.1.1. Второй метод Ляпунова ................................................................................ 19
2.2 Введение в нелинейный оптимальный контроль. .......................................... 20
2.2.1. Метод динамического программирования .............................................. 21
2.2.2. Характеристики динамического программирования ............................... 23
2.2.3. Принцип Минимума Понтрягина ............................................................... 23
2.3. Расширенная Линеаризация ............................................................................ 24
2.4. Уравнение Рикатти с параметрами, зависящими от состояния(SDRE)........... 26
2.5 Дифференциальные Игры. ............................................................................... 27
Глава 3. Синтез управления для системы глюкоза-инсулин. ................................... 28
3.1. Дискретизация.................................................................................................. 28
3.2. Практическая часть........................................................................................... 29
Список литературы..................................................................................................... 34
3
Введение
Сахарный Диабет — это группа метаболических хронических
заболеваний, характеризующихся высоким уровнем глюкозы в крови,
развивающимся в результате неспособности организма вырабатывать
необходимое количество инсулина, эффективно его использовать, или
комбинации этих факторов. Инсулин — это гормон, который вырабатывается
поджелудочной железой и позволяет глюкозе, получаемой из пищи, проникать
в клетки, где она перерабатывается в энергию, необходимую для
жизнедеятельности организма.
Диабет классифицируется в зависимости от причины и возможности
лечения следующим образом:
сахарный диабет I типа (инсулинзависимый диабет -ИЗД);
сахарный диабет II типа {инсулиннезависимыи диабет- ИНЗД);
Диабет I типа является следствием полного (абсолютного) недостатка
инсулина, вызванного гибелью бета-клеток в островках Лангерганса
поджелудочной железы, которые вырабатывают инсулин. Причины данного
явления до конца не ясны. Болезнь может развиться у людей любого возраста,
хотя чаще она поражает детей и подростков. Людям с данной формой
сахарного диабета для контроля уровня глюкозы в крови необходимо
ежедневно вводить инсулин. Люди с сахарным диабетом 1-го типа могут
погибнуть без инсулина.
Сахарный диабет 1-го типа, как правило, развивается внезапно, с
резкими симптомами: жажда, большое количество мочи (полиурия), чувство
голода, потеря веса, может проявиться потерей сознания с полным
истощением и обезвоживанием организма, коматозным состоянием, когда
необходимо лечение в клинике, в палате интенсивной терапии.
Ежедневная инсулинотерапия, тщательный самоконтроль гликемии,
здоровое питание и регулярная физическая активность позволяют людям с
сахарным диабетом 1-го типа жить нормальной здоровой жизнью.
Число людей с сахарным диабетом 1-го типа постоянно растет. Причины этого
до сих пор не установлены, хотя рост распространенности сахарного диабета
1-го типа может быть связан с изменениям факторов риска окружающей
среды, связанных с сахарным диабетом, процессами, протекающими на
ранних стадиях внутриутробного развития, питанием в детском возрасте или
вирусными инфекциями.
Сахарный Диабет 2-го типа — самый распространенный тип сахарного
диабета.
4
Чаще он развивается после 40 лет, хотя, в настоящее время растет число
детей и подростков с этой формой заболевания. Количество выработанного
инсулина может быть нормальным или меньшим, чем у людей, не страдающих
от диабета, но очень часто уровень инсулина в крови при этом типе диабета
бывает даже выше, чем у здоровых людей. Как повышенный, так и
пониженный уровень инсулина могут привести к повышению уровня глюкозы
в крови.
Большое количество людей с сахарным диабетом 2-го типа могут не
подозревать о своем заболевании в течение длительного времени, могут
пройти годы, прежде чем проявятся первые симптомы сахарного диабета или
их можно будет распознать. В течение этих лет повышенное содержание
глюкозы в крови наносит организму непоправимый вред. Часто диагноз
выявляют уже после развития осложнений. Хотя причины развития сахарного
диабета 2-го типа до сих пор неизвестны, существуют несколько ведущих
факторов риска развития:
ожирение;
недостаточная физическая активность;
нездоровое питание;
возраст старше 40 лет;
наследственность;
этническая принадлежность;
высокий уровень глюкозы в крови во время беременности,
влияющий на развитие плода.
При сахарном диабете 2-го типа, в отличие от 1-го типа, как правило,
нет жизненно важных показаний к ежедневному введению инсулина.
Множество людей с сахарным диабетом 2-го типа контролируют свое
заболевание с помощью здорового питания, повышенной физической
активности и таблетированных сахаропонижающих препаратов. Тем не менее,
инсулин может быть назначен в том случае, если не удается поддерживать
должный уровень глюкозы в крови. Во всем мире количество людей с
сахарным диабетом 2-го типа неуклонно растет. Это связывают с
экономическим развитием, демографическим старением населения, растущей
урбанизацией, изменением пищевых привычек, снижением уровня физической
активности и другими переменами в привычном образе жизни.
Диабет является одной из главных проблем здравоохранения в мире.
Количество людей, больных диабетом, очень велико, и постоянно
стремительно растёт. Согласно данным Международной Федерации
Диабета(IDF), около 382 миллионов людей по всему миру, или 8,3% всего
взрослого населения, болели диабетом в 2013 году, а к 2035 году, согласно
прогнозам, эта цифра увеличится почти в полтора раза, до 592 миллионов [1].
5
Более того, по оценкам Всемирной Организации Здравоохранения, в 2012 году
по причине диабета произошло1,5 миллиона смертельных случаев, а к 2030
году диабет станет седьмой по значимости причиной смерти [2].
К несчастью, в этой области наша страна не отстаёт от остального мира.
Согласно данным Международной Федерации Диабета, в 2013 году Россия
находилась на пятом месте в мире по количеству людей, больных диабетом,
после Китая, Индии, Соединённых Штатов И Бразилии [1].
Глядя на эту пугающую статистику и прогнозы, неудивительно, что во
всём мире всё больше и больше средств тратится на борьбу с этим тяжёлым
заболеванием.
Проблема диабета крайне актуальна на сегодняшний день. Научное
сообщество, безусловно, проявляет повышенный интерес к решению этой
проблемы. Начиная с 70х годов прошлого века, ведутся активные
исследования в области математического моделирования гомеостаза глюкозы
([3], [4], [6]-[13]). Более того, одна из секций восемнадцатого Международного
Конгресса Международной Федерации по Автоматическому Управлению
(IFAC) была озаглавлена Моделирование и контроль Искусственной
Поджелудочной Железы: Новая эра в регулировании уровня глюкозы у людей с
сахарным диабетом первого типа (Modeling and control for the artificial
pancreas: A new era in glucose regulation of people with type 1 diabetes
mellitus.)[5] Множество интересных работ было представлено([17]-[24]), и,
как следует из названия, основной темой этих докладов была Искусственная
поджелудочная железа (Artificial Pancreas).
Искусственная Поджелудочная Железа (ИП) - концепт системы, которая
может помочь людям, страдающим от диабета, посредством контроля уровня
глюкозы и своевременного введения аналогов инсулина, подобно тому, как
это делает поджелудочная железа в теле здорового человека.
"Искусственная поджелудочная" состоит из трёх частей:
Сенсор, определяющий концентрацию глюкозы в крови
Инсулиновая помпа, вводящая, по мере необходимости, инсулин в тело
пациента
Управляющий алгоритм, определяющий частоту и размер инъекций
Тема данной ВКР: «Метод расширенной линеаризации в задаче
стабилизации уровня глюкозы в крови». Цель – применить для получения
оптимального управляющего алгоритма новый, но широко применяемый и
хорошо зарекомендовавший себя метод – метод Расширенной Линеаризации
(Extended Linearization).
6
Задачи, которые необходимо выполнить для достижения поставленной
цели:
1. Рассмотреть существующие модели гомеостаза глюкозы;
2. Выбрать одну из этих моделей;
3. Применить метод Расширенной Линеаризации для получения оптимального
управления.
Обзор ВКР
В Главе 1 будет рассмотрена история возникновения ИП, этапы развития
и перспективы применения в наше время. Далее будет рассмотрен объект
исследования – несколько математических моделей гомеостаза глюкозы в
человеческом теле, и на основе обзора будет выбрана модель, наиболее
подходящая для целей данной ВКР.
В Главе 2 будет рассмотрена необходимая математическая теория, а
также несколько методов линеаризации, после чего будет подробно описан
метод Расширенной Линеаризации.
В Главе 3 будет представлен синтез управления для системы глюкозыинсулин, и рассмотрены результаты работы.
Глава 1.Объект управления
1.1 Концепт Искусственной Поджелудочной Железы
Первые попытки разработать систему наподобие ИП можно отнести
примерно 50 лет назад, когда возможность внешнего контроля уровня
глюкозы в крови была доказана в экспериментах с участием пациентов с
сахарным диабетом первого типа, используя внутривенные замеры глюкозы и
введение инсулина и глюкозы. После первопроходческой работы [6], в период
с 1974 по 1978 появилось ещё пять, не менее интересных: Albisser et al. [7],
Pfeiffer et al. [8], Mirouze et al. [9], Kraegen et al. [10], and Shichiri et al. [11].
Одна из этих работ [8] в итоге привела к созданию первого коммерческого
продукта - "Биостатора" (the Biostator)[12], после которого появилась другая
стационарная система - Nikkiso STG-22 Blood Glucose Controller,
использовавшаяся в Японии[13]. Это были крупные, громоздкие приборы,
занимающие много места и лишающие пациента мобильности и
независимости.
7
Рис. 1. Биостатор (Biostator), университет Вирджинии
В последнее время наблюдается заметный прогресс в этой области.
Начиная с 1990 года, постоянное подкожное введение инсулина(CSII) стало
широко применяться в инсулиновых помпах. Увеличение безопасности,
уменьшение размеров и повышенная точность настройки инсулиновых помп,
а также появление новых аналогов инсулина привели к заметному повышению
точности контроля глюкозы и комфорта пациентов.
Большой прорыв в разработке ИП был произведён в 1999 году, после
того, как компанией MiniMed на коммерческом рынке была представлена
система постоянного подкожного контроля глюкозы (continuous glucose
monitoring (CGM) system). Эта система требовала минимального
вмешательства пациента, но обеспечивала большую точность. Её появление
запустило постоянно растущую волну интереса, как научного, так и
коммерческого, к разработке новых систем контроля глюкозы. MiniMed
(позже, Medtronic) стал первым прибором, показавшим возможность
существования полностью автоматических систем контроля уровня глюкозы у
пациентов с диабетом первого типа, использующих подкожное введение
инсулина и подкожный контроль уровня глюкозы[25]. В сентябре 2006 года
международная некоммерческая организация JDRF (Juvenile Diabetes Research
Foundation International) запустила проект Искусственная Поджелудочная
(Artificial Pancreas Project), и проспонсировала консорциум научных центров
для исследования этой проблемы. На данный момент, несколько центров
добились интересных результатов ([26]-[30]). Два заметных достижения –
признание Управлениеv по санитарному надзору за качеством пищевых
продуктов и медикаментов Университета Вирджинии-Университета Падовы
8
(Food and Drug Administration of the University of Virginia–University of Padova)
симуляторов диабета первого типа подходящей заменой опытам над
животными для проверки управляющих стратегий [31], и разработка командой
из Института Исследования Диабета Университета Калифорнии, Санта
Барбары и Сансума (the University of California Santa Barbara and the Sansum
Diabetes Research Institute) коммуникационной платформы, позволяющей
производить автоматическую передачу данных между наблюдающим
устройством(CGM), контрольным алгоритмом и инсулиновой помпой[32].
Не менее важным является тот факт, что в 2009 году Национальные
институты здоровья США(U.S. National Institutes of Health) проспонсировали
несколько проектов по разработке ИП в 2009, а также запуск Европейской
Комиссией проекта AP@home в 2010, в котором приняло участие 7
институтов и 5 компаний по всей Европе. Проект не так давно закончился
[33]. Результатом его стала разработка мультимедийной платформы,
способной передавать информацию от коммерчески доступных CGM к
инсулиновой помпе, и позволяющей запускать управляющее ПО,
разработанное участниками и партнёрами этого проекта. Другая разработка
проекта – инновационный прибор, совмещающий в себе инсулиновую помпу
и CGM. Прибор использует только одну точку доступа на теле пациента, что
повышает комфорт и позволяет уменьшить стресс у пациентов, пользующихся
данным прибором. Прибор, на данный момент, тестируется.
Совершенно фантастическим кажется недавно представленное на
Международном Симпозиуме по Схемам и Системам (International Symposium
on Circuits and Systems (ISCAS)) в Лиссабоне чип, способный замерять
концентрацию в крови глюкозы, холестерина, а также некоторых
лекарственных препаратов [34]. Представленный исследователями из
Федеральной политехнической школы Лозанны (École polytechnique fédérale
de Lausanne), чип имеет около сантиметра в длину, вводится под эпидермис, а
внешняя батарея и Bluetooth-модуль крепятся к коже пластырем, почти не
отвлекая пациента от его повседневных дел. Чип уже был испытан на мышах,
и, возможно, в скором времени начнутся тесты на людях.
1.2 Модели гомеостаза глюкозы
После разработки концепта "искусственной поджелудочной", многие
исследователи занялись проблемой cоздания математической модели гомеостаза
глюкозы в человеческом теле, для лучшего понимания механизмов эндокринной
системы и разработки безопасного и эффективного алгоритма, который смог бы
помочь людям, страдающим от диабета.
Система глюкоза-инсулин в организме человека - это сложная система,
контролируемая разными сигналами головного мозга и гормонами; и даже сейчас не
разработано модели, которая бы в точности отражала все взаимодействия глюкозы и
9
инсулина в человеческом теле. Более того, до сих пор существует множество
феноменов в человеческом теле, которые пока не имеют точного научного
объяснения.
Математические модели взаимодействия глюкозы и инсулина, иначе
называемые моделями виртуального пациента, можно условно разделить на две
группы.
Одна из них, называемая фармакокинетической, в которой описана кинетика
абсорбции и клиренса, и некоторые элементы системы определены в соответствии с
этими процессами. Второй тип, называемый физиологическими моделями, в
которых системы органов рассматриваются как составные части модели, и баланс
веществ в каждом органе описан в соответствии с метаболическими процессами и
диффузией между кровью и клетками органов. Фармакокинетические модели проще
вывести из экспериментальных данных, чем физиологические.
Одна из ранних фармакокинетических моделей состояла из одного линейного
уравнения для инсулина и одного для глюкозы[35]. Уравнения первого порядка
были использованы для описания вывода из организма и абсорбции веществ. Эта
модель была модифицирована Акерманом [36]посредством включения инсулина и
других гормонов в регуляцию глюкозы в качестве единой переменной.
Модель, состоящую из двух частей, была разработана в [37]. Выделение
инсулина было описано экспоненциальной функцией глюкозы для здоровых людей,
и нулём, для людей, больных диабетом. Разрушение инсулина было описано
нелинейной функцией.
Другая двухкомпонентная модель, описывающая поведение глюкозы и
регулирующих гормонов была разработана и проверенана основе информации,
полученной от внутривенных глюкозотолерантных тестов и пероральных
глюкозотолерантных тестов в [36].
Второй тип моделей виртуального пациента описывает биохимическую
динамику в каждом из важных органов. Органы со значимыми значениями
выработки или клиренса глюкозы рассматриваются как основные части системы.
Фостер [38] предложил одну модель данного типа, где рассматриваются отдельно
инсулин, глюкагон и жирные кислоты.
Соренсен [39] разделил блок центральных органов на блоки мозга и
внутренних органов, и добавил эффект глюкагона. Эта модель состоит из шести
блоков: мозг, сердце и лёгкие, печень, кишечник, почки и перефирические ткани.
Модель состоит из 21 состояния и 22 метаболических функций, описывающих
динамику глюкозы, инсулина и глюкагона.
10
Кинематическая модель системы регуляции глюкозы была разработана и
представлена в [40], с шестью параметрами, которые необходимо определить.
Четыре состояния системы выражают концентрацию глюкозы и инсулина, общий
эндогенный баланс глюкозы и периферийную инсулинозависимую утилизацию
глюкозы.
Кобелли [41] предложил нелинейную подсистему, состоящую из глюкозной,
инсулиновой и глюкогенной подсистем.В этой системе 9 состояний, 23
метаболические функции и 46 параметров.
Хотя модель Соренсена широко используется в контроле уровня глюкозы, она
подвергается критике за недостаточно точное представление наблюдаемых
изменений глюкозы [42]. Более того, параметры модели должны быть определены
предельно точно, чтобы сделать результаты симуляции более точными. Несмотря на
это, точность физиологической модели понижается ввиду большего количества
параметров по сравнению с фармакокинетическими моделями.
Три модели виртуальных пациентов будут рассмотрены в последующих
секциях. Все три модели являются фармакокинетическими, и все три, хотя
структура моделей и различается, имеют похожие ограничения:
1. Контр-регулятивные гормоны, такие, как, например, глюкагон, эпинефрин, и
проч., имеют сильный эффект на концентрации глюкозы и инсулина. Эффект
этих гормонов не рассматривается в данных моделях.
2. Некоторые физиологические факторы, такие, как стресс или болезнь, могут
серьёзно повлиять на динамику глюкозы и инсулина в человеческом теле.
3. Упражнения и прочая физическая активность также может повлиять на
концентрацию глюкозы и инсулина в крови.
4. Модели не учитывают скорость абсорбции разных видов еды.
1.2.1 Модель Бергмана (Minimal Model of Bergman)
Минимальная модель Бергмана (minimal model of Bergman) [4] широко
применяется для изучения и математического моделирования гомеостаза глюкозы.
Пересмотренная модель была представлена в [43], чтобы учесть клиренс глюкозы
и чувствительность к инсулину. Минимальная модель была улучшена в [44], чтобы
добавить подсистему глюкозы, состоящую из двух блоков. Ховорка [45] добавил
три дополнительные подсистемы глюкозы и инсулина, чтобы расширить
оригинальную модель. Предлагалось несколько других модификаций модели
[46,47]. Большинство моделей было глюкокинетическими, и игнорировало эффект
свободных жирных кислот. В [48] минимальная модель Бергмана была расширена
посредством включения динамики свободных жирных кислот в плазме у людей с
диабетом первого типа.
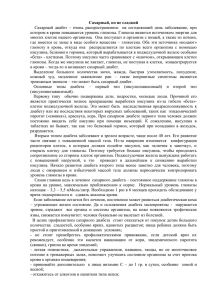
Схематичное изображение минимальной модели Бергмана можно увидеть
на представленной ниже иллюстрации .
11
Рис. 2. Схематическое изображение модели Бергмана
С помощью минимальной модели, в сочетании с некоторыми известными
физиологическими фактами, можно симулировать действие системы глюкозаинсулин с минимальным набором параметров, более того, эта модель подходит для
компьютерного моделирования и разработки управляющих последовательностей.
Модель состоит из трёх дифференциальных уравнений:
𝐺̇ (𝑡) = −𝑝1 [𝐺(𝑡) − 𝐺𝑏 ] − 𝑋(𝑡)𝐺(𝑡) + 𝐷(𝑡),
𝐺(0) = 𝐺0 ,
𝑋(𝑡) = −𝑝2̇ 𝑋(𝑡) + 𝑝3 [𝐼(𝑡) − 𝐼𝑏 ],
(1)
𝑋(0) = 0,
𝐼 (̇ 𝑡) = 𝛾[𝐺(𝑡) − ℎ]+ − 𝑛[𝐼(𝑡) − 𝐼𝑏 ] + 𝑢(𝑡),
𝐼(0) = 𝐼0,
, где G и I есть концентрация глюкозы(мг/дл) и инсулина (ЕД/мл) в плазме,
соответственно.
𝐺𝑏 и I𝑏 - базовые уровни концентрации глюкозы и инсулина в плазме.
X - вспомогательная переменная, описывающая зависимость концентрации
инсулина в крови от количества поглощенной глюкозы;
Глюкоза в плазме разрушается с частотой 𝑝1 , пропорционально разнице между
количеством глюкозы G(t) и базовым уровнем глюкозы 𝐺𝑏 . Если фактический
уровень глюкозы в плазме ниже базового, глюкоза попадает в кровь, и наоборот,
глюкоза выводится из плазмы, если уровень выше базового. Вторая часть, X(t)G(t),
описывает дополнительный механизм, при помощи которого глюкоза выводится из
плазмы благодаря инсулину, находящемуся в межклеточном пространстве. D(t) глюкоза, поступающая из употреблённой пищи. Инсулиновая динамика реализована
как внутривенный ввод инсулина пациенту.
Несмотря на широкое применение, у минимальной модели Бергмана есть ряд
существенных недостатков. Индексы инсулиновой чувствительности и
эффективности глюкозы описывают не только эффект глюкозы и инсулина на
утилизацию глюкозы, но и влияние на производство глюкозы. Более того, как
показано в [49] минимальная модель Бергмана структурно некорректна в
математическом смысле. Например, при ℎ < 𝐺𝑏 , система даже не подразумевает
12
устойчивого состояния, хотя выделение инсулина пытается достичь цели. В этом
случае, вспомогательная переменная lim sup 𝑋(𝑡) = ∞.
𝑡→∞
1.2.2 Модель Стариса (Sturis model)
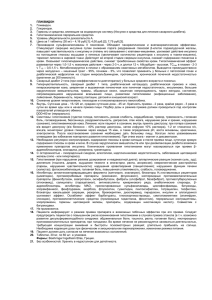
Модель состоит из трёх основных частей, описывающих основные
метаболические процессы, участвующие в регуляции уровня глюкозы. Схематичное
изображение модели представлено на рисунке, представленном ниже:
Рис. 3. Схематическое изображение модели Стариса.
Модель состоит из трёх частей: количество глюкозы в крови, количество
инсулина в плазме, и количество инсулина в межклеточном пространстве.
Основываясь на двух отрицательных обратных связях, описывающих
поглощение глюкозы инсулином и выделение инсулина поджелудочной железой в
зависимости от количества поступившей глюкозы, Старис с соавторами разработали
математическую модель, которая описывается системой ОДУ 6-го порядка
𝑑𝑥
𝑥
𝑦
𝑥
= −𝑓1 − 𝐸 ( − ) − ,
𝑑𝑡
𝑑𝑦
𝑑𝑡
𝑑𝑧
𝑉1
𝑦
1
2
𝑡1
= 𝐸( − )− ,
𝑉
𝑉
𝑡
2
̇
= 𝑓5 (ℎ3 ) + 𝐼 − 𝑓2 (𝑧) − 𝑓3 (𝑧)𝑓4 (𝑦),
𝑑𝑡
𝑑ℎ1
𝑑𝑡
𝑑ℎ2
𝑑𝑡
𝑑ℎ3
𝑑𝑡
𝑥
𝑉2
𝑦
=
=
=
3(𝑥−ℎ1 )
,
𝑡3
3(ℎ1 −ℎ2 )
𝑡3
3(ℎ2 −ℎ3 )
𝑡3
,
,
13
(2)
, где G(t) - количество глюкозы, 𝐼𝑝 (𝑡), 𝐼𝑖 (𝑡), - количество инсулина в плазме и
межклеточном пространстве, соответственно, 𝑉𝑝 - объём распределения инсулина в
плазме, 𝑉𝑖 , - эффективный объём межклеточного пространства, Е - скорость
диффузионного перемещения, 𝑡𝑝 , 𝑡𝑝 - константы разрушения инсулина в плазме и
межклеточном пространстве, соответственно, а 𝑥1 (𝑡), 𝑥2 (𝑡), 𝑥3 (𝑡) - три
дополнительных переменных, связанных с задержкой действия инсулина на
производство глюкозы в печени. 𝑓1 (𝑡) (G(t)) - функция, моделирующая
производство инсулина поджелудочной железой, зависящее от концентрации
глюкозы, 𝑓2 , 𝑓3 , 𝑓4 - функции, описывающие утилизацию глюкозы разными частями
тела (мозг и нервные клетки(2), жир и мышцы(3,4)), а 𝑓5 моделирует производство
глюкозы печенью. Формы для этих функций можно найти в [15].
𝑓1 (𝑧) = 209/[1 + exp(−
𝑧
+ 6.6)],
300𝑉3
𝑓2 (ℎ3 ) = 72[1 − exp(−𝑧/144𝑉3 )]
𝑓3 (𝑧) =
0.01𝑧
𝑉3
,
1
1
𝑉2
𝐸𝑡2
𝑓4 (𝑦) = 4 + 90/[1 + exp(−1.772 log (𝑦 ( +
𝑓5 (ℎ3 ) = 180[1 + exp(0.29(
ℎ3
𝑉1
(3)
)) + 7.76)],
− 7.5))],
Таблица 1
Параметры в модели Стариса
Параметр
I
E
𝑡1
𝑡2
𝑡3
𝑉1
𝑉2
𝑉3
Определение
Константа, определяющая скорость обмена инсулина
между плазмой и внешними частями
Скорость попадания в кровь экзогенной глюкозы
Временная константа для разрушения инсулина в
плазме
Временная константа для разрушения внешнего
инсулина
Временная задержка между производством инсулина
и глюкозы
Объём распределения инсулина в плазме
Объём внешнего инсулина
Объём глюкозного пространства
1.2.3 Модель Ховорки. (Hovorka model)
14
Значение
0.2 Л/мин
216 мг/мин
6 мин
100 мин
36 мин
3Л
11 Л
10 Л
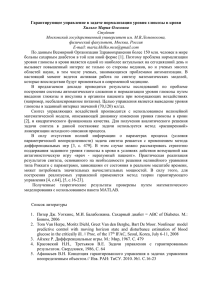
Похожим образом, как и Бергман, Ховорка[16] предложил нелинейную модель
для разработки оптимального управления для пациентов с диабетом первого типа. В
данной модели включены подмодели, описывающие абсорбция подкожно
введённого быстродействующего инсулина(Lispro), а также абсорбция во
внутренних органах.
Схема модели представлена на рисунке внизу
Рис. 3. Схематическое изображение модели Ховорки.
Модель состоит из подсистемы глюкозы (абсорбция, распределение и вывод),
инсулиновой подсистемы (абсорбция, распределение и разрушение инсулина), и
подсистемы действия инсулина.
15
𝑑𝑄1 (𝑡)
𝑐 (𝑡)
= −[𝐹01
+ 𝑥1 (𝑡)𝑄1 (𝑡)] + 𝑘12 𝑄2 (𝑡) − 𝐹𝑅 (𝑡) + 𝑈𝐺 (𝑡) + 𝐸𝐺𝑃0 [1 − 𝑥3 (𝑡)],
𝑑𝑡
𝑑𝑄2 (𝑡)
𝑑𝑡
𝑑𝑆1 (𝑡)
𝑑𝑡
𝑑𝑆1 (𝑡)
𝑑𝑡
= 𝑥1 (𝑡)𝑄1 (𝑡) − [𝑘12 + 𝑥2 (𝑡)]𝑄2 (𝑡),
= 𝑢(𝑡) − 𝑆1 (𝑡)/𝑡𝑚𝑎𝑥,𝐼 ,
𝑑𝐼(𝑡)
𝑑𝑡
𝑑𝑥1 (𝑡)
𝑑𝑡
𝑑𝑥2 (𝑡)
𝑑𝑡
𝑑𝑥3 (𝑡)
𝑑𝑡
1
1
𝑉2
𝐸𝑡2
= 4 + 90/[1 + exp(−1.772 log (𝑦 ( +
=
𝑆2 (𝑡)
𝑉𝐼 𝑡𝑚𝑎𝑥,𝐼
)) + 7.76)],
− 𝑘𝑒 𝐼(𝑡),
= −𝑘𝑎1 𝑥1 (𝑡) + 𝑘𝑏1 𝐼(𝑡)
,
= −𝑘𝑎2 𝑥2 (𝑡) + 𝑘𝑏2 𝐼(𝑡)
= −𝑘𝑎3 𝑥3 (𝑡) + 𝑘𝑏3 𝐼(𝑡)
(4)
Функции метаболических процессов можно увидеть в формуле 5, значения и
определения переменных и параметров можно найти в таблице 2 и 3
соответственно.
𝐹01 , 𝐺 ≥ 4.5 ммоль/Л,
𝑐 (𝑡)
𝐹01
= {𝐹01𝐺(𝑡)
, 𝐺 < 4.5 ммоль/Л,
4.5
(5)
0.003(𝐺(𝑡) − 9)𝑉𝐺 , 𝐺 ≥ 9 ммоль/Л,
𝐹𝑅 (𝑡) = {
0,
𝐺 < 9 ммоль/Л,
𝑈𝐺 (𝑡) = 𝐷𝐺 𝐴𝐺 𝑡𝑒 −𝑡/𝑡𝑚𝑎𝑥,𝐺 /𝑡𝑚𝑎𝑥,𝐺 2 ,
Таблица 2
Переменные в модели Ховорки
Переменная Значение
Единицы
измерения
𝐺
Концентрация глюкозы в плазме
ммоль/Л
Количество глюкозы в доступных блоках
ммоль
𝑄1
Количество глюкозы в недоступных блоках
ммоль
𝑄2
Инсулинонезависимый поток глюкозы
ммоль/(Лмин)
𝐹01
Почечный глюкозный клиренс
ммоль/(Лмин)
𝐹𝑅
Скорость абсорбции глюкозы
ммоль/(Лмин)
𝑈𝐺
Концентрация инсулина в плазме
мМЕ/Л
𝐼
Действие инсулина на транспортировку глюкозы
𝑥1
мин−1
Действие инсулина на поглощение глюкозы
𝑥2
мин−1
Действие инсулина на производство глюкозы
𝑥3
мин−1
16
Таблица 3
Параметры в модели Ховорки
Параметр Смысл
Скорость передачи между доступными и
𝑘12
недоступными блоками
Скорость деактивации
𝑘𝑎1
Скорость деактивации
𝑘𝑎2
Скорость деактивации
𝑘𝑎3
Скорость активации
𝑘𝑏1
Скорость активации
𝑘𝑏2
Скорость активации
𝑘𝑏3
Скорость элиминации инсулина из плазмы
𝑘𝑒
Объём распределения инсулина
𝑉𝐼
Объём распределения глюкозы
𝑉𝐺
Количество переваренных углеводов
𝐷𝐺
Биодоступность углеводов
𝐴𝐺
TMR абсорбции углеводов
𝑡𝑚𝑎𝑥,𝐺
Эндогенное производство глюкозы,
𝐸𝐺𝑃0
экстраполированное к нулевой
концентрации инсулина
Инсулинонезависимый поток глюкозы
𝐹01
TMR абсорбции подкожно введённого
𝑡𝑚𝑎𝑥,𝐼
инсулина короткого действия
Значение
0.066 мин−1
0.006 мин−1
0.06 мин−1
0.03 мин−1
3.07e-5 мин−1
4.92e-5 мин−1
1.56e-4 мин−1
0.138 мин−1
0.12 Л/кг
0.16 Л/кг
N.A.
0.8
40 мин
0.0161 ммоль кг−1 мин−1
0.0097 ммоль кг−1 мин−1
55 мин
1.3 Заключение.
Модели Бергмана, Стариса и Ховорки используют разные подходы к
моделированию взаимодействия глюкозы и инсулина в человеческом теле. Чтобы
улучшить управляющие алгоритмы регуляции глюкозы в человеческом теле, и, как
следствие, качество медицинского сопровождения диабета, модели гомеостаза
глюкозы должны постоянно улучшаться и усложняться, для более глубокого
понимания патологии и физиологии диабета.
После тщательного рассмотрения современных моделей гомеостаза глюкозы,
минимальная модель Бергмана была выбрана в качестве объекта исследования.
Несмотря на ряд проблем и ограничений, сопутствующих этой модели, она смогла
зарекомендовать себя как надёжная и хорошо изученная модель, применяющаяся
как для виртуальной модуляции, так и в работе с реальными пациентами.
Глава 2. Постановка задачи управления
Назначение данной главы - представить краткое введение в математические
основы данной ВКР, дать определение необходимым понятиям, и привести
17
определения, необходимые для понимания сути вопроса. Здесь будут приведены
определения устойчивости, асимптотической устойчивости, устойчивости по
Ляпунову, а также будут приведены важные концепты теории автоматического
управления, такие, как уравнение Гамильтона-Якоби-Беллмана и Принцип
минимума Понтрягина. Это поможет понять основы построения оптимального
управления, и объяснит повышенный интерес к теме Расширенной Линеаризации,
так как слабые стороны этих методов станут ясны.
2.1 Математические основы
Этот раздел содержит введение в теорию управления. Пусть объект задан
следующим образом:
𝑥̇ = 𝑓(𝑥) + 𝑔 (𝑥)𝑢, 𝑓(0) = 0
(6)
, где 𝑥(𝑡) ∈ ℝ𝑛 есть состояние системы в момент времени t, а 𝑢(𝑡) ∈ ℝ𝑚 есть вход
системы. Отображения 𝑓: ℝ𝑛 → ℝ𝑛 и 𝑔: ℝ𝑚 → ℝ𝑛×𝑚 – непрерывные и локально
Липшицевы в некоторой области 𝐷 ⊂ ℝ𝑛 . Если особая точка системы такова, что
𝑓(0) ≠ 0, тогда особая точка может быть сдвинута без потери общности. Особая
точка системы устойчива, если все решения внутри некоторой известной
окрестности остаются внутри этой окрестности. Более точно,
Определение 1. Особая точка системы (6) при 𝑥 = 0
устойчива по Ляпунову, если для любого 𝜖 > 0 существует 𝛿 = 𝛿(𝜖), такое,
что
‖𝑥(0)‖ < 𝛿 ⇒ ‖𝑥(𝑡)‖ < 𝜖, ∀𝑡 ≥ 0
асимптотически устойчива, если оно устойчиво по Ляпунову, и 𝛿 можно
выбрать таким образом, что
‖𝑥(0)‖ < 𝛿 ⇒ lim 𝑥(𝑡) = 0, ∀𝑡 ≥ 0
и неустойчива, если не устойчива.
𝑥→∞
Решение 𝑥(𝑡) системы (6) необходимо, при 𝑡 ≥ 0 для того, чтобы определить
устойчивость решения согласно Определению 1. Нахождение этого решения
нередко представляет из себя сложную задачу, для некоторых типов уравнений. По
этой причине, универсальным методом исследования устойчивости для нелинейных
систем является второй метод Ляпунова. В следующей секции будет дана
необходимая теория касательно второго метода Ляпунова.
18
2.1.1. Второй метод Ляпунова
Второй метод Ляпунова используется для исследования решений
дифференциального уравнения на устойчивость. Метод основан на наблюдении,
заключающимся в том, что если скорость изменения энергии в системе
неположительна вдоль всех её траекторий, то точки, находящиеся в некоторой
известной окрестности особой точки будут стремиться остаться в некоторой
известной окрестности особой точки.
Особенностью этого метода является то, что для определения устойчивости не
надо находить решение уравнения, что делает этот метод крайне выгодным для
работы с нелинейными системами. Второй метод Ляпунова состоит в исследовании
особых функций, называемых функциями Ляпунова. Если функция, являющаяся
кандидатом в функции Ляпунова, удовлетворяет ряду требований, она называется
функцией Ляпунова. Более точно,
Определение 2. Пусть 𝑥 = 0 – особая точка системы (1), и пусть область 𝐷 ⊂
ℝ𝑛 содержит 𝑥 = 0. Тогда непрерывно-дифференцируемая функция 𝑉: 𝐷 → ℝ,
удовлетворяющая
1. 𝑉(0) = 0,
2. 𝑉(𝑥) > 0, ∀𝑥 ∈ 𝐷 − {0}
называется Функцией Ляпунова.
Функция Ляпунова называется положительно определённой, если она
удовлетворяет условиям 1 и 2 одновременно. Если функция Ляпунова удовлетворяет
только 𝑉(𝑥) ≥ 0 для 𝑥 ≠ 0, тогда говорят, что функция Ляпунова положительно
полуопределена. Если −𝑉(𝑥) положительно определённая или положительно
полуопределённая, то говорят, что 𝑉(𝑥) отрицательно определённая или
отрицательно полуопределённая, соответственно. Если 𝑉(𝑥) знаконеопределённая,
то нельзя ничего сказать об устойчивости особой точки.
Когда функция-кандидат, удовлетворяющая необходимым условиям, найдена,
её можно использовать для определения стабильности или асимптотической
стабильности, используя Второй Метод Ляпунова:
Теорема 1. (Второй Метод Ляпунова) пусть точка 𝑥 = 0 есть особая точка
системы (6), и пусть 𝐷 ⊂ ℝ𝑛 - область, содержащая 𝑥 = 0. Тогда 𝑥 = 0 устойчиво,
если ∃𝑉(𝑥) ∈ 𝐶 1 такой, что 𝑉̇ (𝑥) – отрицательно полуопределена:
𝑉̇ (𝑥) ≤ 0 ∀𝑥 ∈ 𝐷
и асимптотически стабильна, если ∃𝑉(𝑥) ∈ 𝐶 1 такая, что 𝑉̇ (𝑥) отрицательно
определена:
𝑉̇ (𝑥) < 0 ∀𝑥 ∈ 𝐷
19
Таблица 4
Классификация функций Ляпунова
Значения функции Ляпунова
положительно
𝑉(𝑥) > 0
определена
положительно
𝑉(𝑥) ≥ 0
полуопределена
отрицательно
−𝑉(𝑥) > 0
определена
отрицательно
−𝑉(𝑥) ≥ 0
полуопределена
Устойчивость
𝑉̇ (𝑥) ≤ 0
Асимптотическая
𝑉̇ (𝑥) < 0
устойчивость
Заметим, что приведённая теорема есть достаточное условие для
устойчивости. Невозможность функции-кандидата удовлетворить требованиям,
представленным к функции Ляпунова для устойчивости или асимптотической
устойчивости, означает лишь, что устойчивость невозможно определить с помощью
второго метода Ляпунова. Устойчивость особой точки можно определить с
помощью других методов и подходов.
2.2 Введение в нелинейный оптимальный контроль.
Как было отмечено в [50], задача оптимального контроля впервые была
рассмотрена в 1696 году, в Нидерландах, когда Иоганн Бернулли предложил своим
коллегам следующую задачу: даны две точки, A и B, фиксированные на плоскости
𝑥𝑦, причём B ниже A, найти траекторию ACB свободной точки C, которая, начиная
из A и действуя только под действием силы тяжести, на которой C доходит до B за
кратчайший период времени. Многие могут узнать в этом задачу о брахистохроне.
Современная нам теория оптимального управления развивалась в эпоху
противостояния двух сверхдержав, в атмосфере недоверия и соревнования,
особенно во время космической гонки. Наиболее заметными стали подходы
Советского математика Льва Понтрягина и американского математика Ричарда
Беллмана. Что интересно, Принцип минимума Понтрягина представляет из себя
обобщение уравнения Эйлера-Лагранжа из классического Вариационного
Исчисления. Как отмечено в [51], это обобщение можно рассматривать как вариант
20
Гамильтонианского подхода к вариационным задачам. Метод динамического
программирования, с другой стороны, можно рассматривать как вариант подхода
Гамильтона-Якоби к вариационным задачам.
Пусть система задана следующим образом:
𝑥̇ = 𝑓(𝑥) + 𝑔(𝑥)𝑢, 𝑥(0) = 𝑥0
(7)
, где 𝑥(𝑡) ∈ ℝ𝑛 есть состояние системы, а 𝑢(𝑡) ∈ ℝ𝑚 есть вход системы.
Одновременно 𝑓(𝑥) и 𝑔(𝑥) ∈ 𝐶 𝑘 , притом 𝑓: ℝ𝑛 → ℝ𝑛 и 𝑔: ℝ𝑛 → ℝ𝑛×𝑚 .
Функционал качества имеет вид:
1
∞
𝐽(𝑥0 , 𝑢) = ∫𝑡 (𝑥 ′ 𝑄(𝑥)𝑥 + 𝑢′𝑅(𝑥)𝑢)𝑑𝑡
2
0
(8)
Будем считать, что весовые матрицы состояния при любом x таковы, что
𝑄(𝑥) ≥ 0, 𝑅(𝑥) > 0.
2.2.1. Метод динамического программирования
Метод динамического программирования – метод, впервые рассмотренный
американским математиком Ричардом Беллманом. Центральным концептом в этом
методе является принцип оптимальности:
Определение 3. (Принцип Оптимальности). Пусть 𝑢∗ (𝑡)есть оптимальное
управление на интервале [𝑡0 , 𝑡𝑓 ]. Тогда 𝑢∗ (𝑡) также является оптимальным на
некотором подинтервале [𝑡0 + Δt, t f ]для любого Δt, такого, что 𝑡𝑓 < Δt < 𝑡𝑓 .
Рисунок 4 иллюстрирует данное определение. Стоимость оптимального пути,
𝐽𝐴𝐷 , разделена на цену пересечения AB и затем BD
𝐽𝐴𝐷 = 𝐽𝐴𝐵 + 𝐽𝐵𝐷
21
Рис. 4. Оптимальное управление 𝑢∗ .
Целью динамического программирования является использование принципа
оптимальности для декомпозиции задачи динамической оптимизации до
рекуррентного соотношения. Математически, задача динамического
программирования для нелинейного оптимального управления подразумевает
решение уравнения в частных производных, известного как уравнение ГамильтонаЯкоби-Беллмана. Чтобы получить решение в наиболее общих терминах,
рассмотрим:
𝑉(𝑥) = inf 𝐽(𝑥, 𝑢)
𝑢∈𝑈
(9)
как
𝑇
𝑉 = ∫𝑡 𝐿(𝑥, 𝑢)𝑑𝜏
(10)
Перепишем систему как
𝑥̇ =
𝑑𝑥
= 𝑓(𝑥, 𝑢)
𝑑𝑡
Тогда
′
𝑑𝑥
𝜕𝑉
𝑉̇ = 𝑉𝑥 =
𝑓(𝑥, 𝑢)
𝑑𝑡
𝜕𝑡
(11)
Из (10) получим
𝑉̇ = −𝐿(𝑥, 𝑢)
(12)
Приравняв (11) и (12), получим:
22
𝐻=
𝜕𝑉 ′
𝜕𝑡
𝑓(𝑥, 𝑢) + 𝐿(𝑥, 𝑢)
(13)
Уравнение (13) называется Гамильтонианом, или H-функцией. Оптимальное
управление выражается в виде:
𝑢∗ = argmin H(Vx , x, u)
(14)
𝑢∈Ω
, где Ω – множество возможных управлений. В нашем случае, Гамильтониан можно
записать как:
𝐻=
𝜕𝑉 ′
1
(𝑓(𝑥) + 𝑔(𝑥)𝑢) + [𝑥\𝑄(𝑥)𝑥 + 𝑢′𝑅(𝑥)𝑢]
𝜕𝑥
2
(15)
После минимизации, решение задачи можно представить в виде
𝑢∗ = argmin (
𝜕𝑉 ′
𝑢
𝜕𝑥
1
(𝑓(𝑥) + 𝑔(𝑥)𝑢) + [𝑥\𝑄(𝑥)𝑥 + 𝑢′𝑅(𝑥)𝑢])
2
(16)
После упрощения,
𝜕𝑉 ′
𝑢 = −𝑅 𝑔(𝑥)′
𝜕𝑥
∗
−1
2.2.2. Характеристики динамического программирования
Важные характеристики Динамического программирования приведены ниже:
1.Глобальный минимум. Решение, полученное с помощью метода динамического
программирования задаёт глобальный минимум функционалу качества, 𝐽(𝑥, 𝑢), для
всех 𝑥 в ℝ𝑛 .
𝐽(𝑥, 𝑢∗ ) ≤ 𝐽(𝑥, 𝑢),
∀𝑥 ∈ ℝ𝑛
2. Обратная связь. Решение, полученное методом динамического
программирования, может быть выражено в форме обратной связи.
3. Проклятье Размерности. Вычислительная стоимость Динамического
Программирования экспоненциально растёт в зависимости от размерности системы.
2.2.3. Принцип Минимума Понтрягина
В уравнении Гамильтона-Якоби-Беллмана используется производная V, и
следовательно, V должна быть дифференцируемой.
Пусть
23
𝑝 = −𝑉
Тогда Гамильтониан можно записать в виде
𝐻 = 𝑝′ 𝑓(𝑥, 𝑢) − 𝐿(𝑥, 𝑢) = 0
(17)
Пусть, далее 𝑢(𝜏)∗ есть оптимальное управление в том смысле, что значение V
от 𝑢∗ будет меньше, чем от любого другого значения 𝑢(𝜏). Согласно Принципу
Минимума Понтрягина, необходимые условия оптимальности управления
{𝑢∗ (𝜏): 𝜏 ∈ [𝑡, 𝑇]} есть:
1. Гамильтониан (17) должен иметь абсолютный минимум при u(τ) = u∗ (𝜏):
𝐻(𝑥 ∗ , 𝑝∗ , 𝑢∗ ) ≤ 𝐻(𝑥 ∗ , 𝑝∗ , 𝑢)
(18)
2. Значение Гамильтониана H при t=T есть нуль:
𝐻(𝑥 ∗ , 𝑝∗ , 𝑢∗ ) = 0
(19)
2.3. Расширенная Линеаризация
Пусть система задана следующим образом:
𝑥̇ = 𝑓(𝑥) + 𝑔(𝑥)𝑢, 𝑥(0) = 𝑥0
(7)
, где 𝑥(𝑡) ∈ ℝ𝑛 есть состояние системы, а 𝑢(𝑡) ∈ ℝ𝑚 есть вход системы.
Одновременно 𝑓(𝑥) и 𝑔(𝑥) ∈ 𝐶 𝑘 , притом 𝑓: ℝ𝑛 → ℝ𝑛 и 𝑔: ℝ𝑛 → ℝ𝑛×𝑚 .
Наша задача – найти управление 𝑢∗ , которое доставляет минимум
функционалу качества вида:
1
∞
𝐽(𝑥0 , 𝑢) = ∫𝑡 (𝑥 𝑇 𝑄(𝑥)𝑥 + 𝑢𝑇 𝑅(𝑥)𝑢)𝑑𝑡
2
0
(8)
Будем считать, что весовые матрицы состояния при любом x таковы, что
𝑄(𝑥) ≥ 0, 𝑅(𝑥) > 0.
Пусть Ω есть открытое, ограниченное подмножество ℝ𝑛 , Ω ⊂ ℝ𝑛 , содержащее
начальное состояние 𝑥0 . Предполагая, что 𝑓(0)=0 и 𝑔(𝑥)≠0 для ∀𝑥 , необходимо
построить такое управление u(t), которое бы минимизировало функционал качества
(1.2) для системы (1.1) и стабилизировало систему для ∀𝑥,
𝑢(𝑡) = −𝑘(𝑥) = −𝐾(𝑥)𝑥, 𝑘(0) = 0
(20)
Cуществует множество методов для анализа и дизайна нелинейных систем[52]. В
методе Расширенной Линеаризации, также известном как SDC-параметризация,
уравнение(n) представляется в псевдолинейном виде, с матрицами, зависящими от
24
состояния. Непрерывная, нелинейная матричная функция, A: Ω → Rn×n , всегда
может быть получена математической параметризацией, если f(x) удовлетворяет
условиям:
Условие1. 𝑥 = 0 ∈ Ω есть особая точка системы, такая, что f(0)=0.
Условие 2. Вектор-функция f(x) хотя бы непрерывно дифференцируемая в Ω , то
есть
𝑓(⋅) ∈ 𝐶^1(Ω )
При выполнении этих условий, f(x) можно представить в виде
𝑓(𝑥) = 𝐴(𝑥)𝑥
В зависимости от системы, может существовать несколько подходящих SDCматриц. Для скалярных систем SDC параметризация уникальна для всех 𝑥≠0 и
представлена в виде 𝑎(𝑥)=𝑓(𝑥)/𝑥[53]. В остальных случаях существует как
минимум две подходящие матрицы. Из-за того, что матрица A(x) неуникальна,
качество управления может розниться.
Если возможно получить более одной SDC-матрицы, весьма выгодно
использовать параметризацию, которая доставляет максимум какому-то,
значимому для нас параметру. Как было показано в [54], в многомерном случае
всегда существует бесконечное число SDC-матриц. Вводя в рассмотрение
репрезентативный параметр 𝛼, каждая подходящая SDC-матрицa может быть
коллективно представлена гиперповерхностью. Результирующая SDC-матрицa
называется параметризованной SDC-матрицей.
Теорема 2. Пусть 𝑓(𝑥) = 𝐴𝑖 (𝑥)𝑥, 𝑖 = 1 … 𝑘 – k+1 разных SDC-матриц ∀𝑥 ∈ Ω и
пусть 𝛼 ∈ ℝ - скалярный параметр, такой, что 𝛼 ∈ [0,1]. Тогда
параметризованная SDC-матрица 𝐴(𝑥, 𝛼) задаётся следующим образом:
𝑘
𝑘
𝐴(𝑥, 𝛼) = (1 − 𝛼𝑘 )𝐴𝑘+1 (𝑥) + ∑ (∏ 𝛼𝑗 ) (1 − 𝛼𝑖−1 )𝐴𝑖 (𝑥),
𝑖=1
𝑗=1
где 𝛼0 ≜ 0.
Не единственность SDC параметризации для многомерных систем создает
дополнительные степени свободы, которые нельзя получить в других методах
управления нелинейными системами и которые предоставляют большую гибкость в
построении управления.
Используя метод Расширенной Линеаризации, систему (7) можно переписать в
виде:
𝑥̇(𝑡) = 𝐴(𝑥)𝑥(𝑡) + 𝐵(𝑥)𝑢(𝑡)
25
(21)
, где 𝑓(𝑥) = 𝐴(𝑥)𝑥 и 𝑔(𝑥) = 𝐵(𝑥).
Любой метод синтеза управления, применённый к системе (20) с SDCматрицами, называют методом Расширенной Линеаризации. Таким образом,
имеется широкий класс методов управления, сводящихся к записи управления в
виде (20). В этом случае система (21) принимает вид
ẋ(t) = [A(x) − B(x)K(x)]x(t).
Следует отметить, что в случае оптимального управления матрица
𝐴𝐶𝐿(𝑥) = 𝐴(𝑥) − 𝐵(𝑥)𝐾(𝑥)
(22)
является Гурвицевой ∀𝑥 ∈ Ω.
Определение 4. Матрица A(x) называется Гурвицевой в Ω, если собственные
значения этой матрицы таковы, что ℜ[𝜆𝑖 (𝐴(𝑥))] < 0 для ∀𝑥 ∈ Ω.
2.4. Уравнение Рикатти с параметрами, зависящими от
состояния(SDRE)
Построение управления с помощью уравнение Рикатти с параметрами,
зависящими от состояния (State-Dependent Ricatti Equation, SDRE) - хорошо
известная и ставшая очень популярной в последнее время стратегия, обеспечивая
эффективный алгоритм синтеза нелинейной обратной связи. Этот метод, впервые
предложенный Пирсоном в 1962 году[55], и позже расширенный и дополненный в
[56], а также, независимо от других, изучался Мрацеком и Клутье [53,54].
SDRE-подход для решения систем вида (7) с критерием качества (8) на
неограниченном интервале времени – это обобщение LQR подхода, где все
коэффициенты матриц зависят от параметров состояния
При использовании SDRE-подхода, управление для нелинейных систем (7) с
функционалом качества в виде (8) ищется в следующем виде:
𝑢(𝑡) = −𝑅−1 (𝑥)𝐵𝑇 (𝑥)𝑆(𝑥)𝑥(𝑡),
где 𝑆(𝑥) является единственным, симметричным, положительно-определенным
решением матричного уравнения Риккати:
𝐴𝑇 (𝑥)𝑆(𝑥) + 𝑆(𝑥)𝐴(𝑥) + 𝑄(𝑥) − 𝑆(𝑥)𝐵(𝑥)𝑅−1 (𝑥)𝐵𝑇 (𝑥)𝑆(𝑥) = 0
Таким образом, подставив результаты управления на основе SDRE-подхода,
получаем следующее решение системы:
𝑥̇ (𝑡) = [𝐴(𝑥) − 𝐵(𝑥)𝑅−1 (𝑥)𝑆(𝑥)]𝑥(𝑡)
Для того, чтобы было возможным представить управление системы (7) в SDCвиде, необходимо выполнение следующих условий:
26
1. 𝑓(𝑥) - непрерывно-дифференцируемая по 𝑥 вектор-функция в области Ω,
такая, что𝑓(∙) ∈ 𝐶 1 (𝛺) , а 𝐵 – матричная функция, такая, что 𝐵(∙) ∈ 𝐶 0 (𝛺).
2. Будем считать, без потери общности, точку 𝑥 = 0 ∈ 𝛺 точкой равновесия
системы с 𝑢=0 такой, что 𝑓(0) = 0 и 𝐵(𝑥) ≠ 0 для ∀𝑥 ∈ Ω.
3. Расчетные коэффициенты матричных функций принадлежат области 𝐶 0 (Ω) и
удовлетворяют условиям 𝑄(𝑥) = 𝑄𝑇 (𝑥) ≥ 0, 𝑅(𝑥) = 𝑅𝑇 (𝑥) > 0, ∀𝑥 ∈ Ω.
4. Соответствующие пары {𝐴(𝑥),𝐵(𝑥)} и {𝐶(𝑥),𝐴(𝑥)} в SDC-представлении
управляемы и стабилизируемы для нелинейной системы (7) ∀𝑥 ∈ Ω, где
𝑄(𝑥) = 𝐶 𝑇 (𝑥)𝐶(𝑥)
2.5 Дифференциальные Игры.
Пусть интересующая нас нелинейная система представлена в виде:
𝑑𝑥(𝑡)
= 𝑓(𝑥) + 𝐷(𝑥)𝑤(𝑡) + 𝐵(𝑥)𝑢(𝑡), 𝑥(𝑡0 ) = 𝑥0 ,
(23)
𝑑𝑡
𝑢(𝑡) ∈ 𝑈, 𝑤(𝑡) ∈ 𝑊, 𝑡 ∈ [𝑡0 , 𝑇]
, где x(t) есть состояние, u(t) – управление, 𝑓(𝑥), 𝐵(𝑥), 𝐷(𝑥)− непрерывные матрицыфункции. Предполагаем, что для любого x система управляема и наблюдаема.
Предполагается, что неконтролируемое возмущение w(t), которое может быть
как детерминированным, так и стохастическим, характеризуется следующим
отношением:
|𝑤(𝑡)| ≤ 𝜎(𝑥(𝑡)), ∀𝑡 ∈ [𝑡0 , 𝑇]
где |𝑤𝑖 (𝑡)| ≤ 𝜎𝑖 (𝑥(𝑡)), 𝑖 = 1, 𝑘, 𝑡 ∈ [𝑡0 , 𝑇], 𝜎𝑖 (𝑥(𝑡)) ≥ 0, для всех 𝑥(𝑡) ∈ Ω𝑥 , или в
общем виде 𝑤(𝑡) ∈ 𝑊.
Рассматривая возмущение w(t) как действие некоторого игрока, целью
которого является противодействие успешному выполнению задачи управления,
сформулируем задачу управления в ключе дифференциальной игры двух игроков
𝐺𝑢 и 𝐺𝑤 . Построение управлений 𝑢(𝑡) ∈ 𝑈 и 𝑤(𝑡) ∈ 𝑊 будет осуществляться с
использованием принципа обратной связи по состоянию.
Целью управления u(t) при противодействии процесса w(t) является
построение такого управляющего воздействия 𝜉 = 𝜉(𝑥(𝑡), 𝑢(𝑡), 𝑤(𝑡)), которое
обеспечит выполнение заданного условия |Ψ(𝑥(𝑡))| ≤ 𝑑, 𝑑 > 0. ЗдесьΨ(𝑥(𝑡)) ∈ 𝑅 𝑔 .
Введем функционал качества дифференциальной игры
1
𝑇
𝐽(𝑥, 𝑢, 𝑤) = ∫𝑡 [𝑦 𝑇 (𝑡) 𝑄𝑦(𝑡) + 𝑢𝑇 (𝑡)𝑅𝑢(𝑡) − 𝑤 𝑇 𝑃𝑤(𝑡)]𝑑𝑡
2
0
(24)
Здесь матрица Q − по крайней мере, положительно полуопределенная, матрицы R,P
− положительно определенные. Предполагается, что ограничения, наложенные на
процессы u(t) и w(t), можно учесть соответствующим назначением матриц R, P.
27
Относительно верхнего предела функционала (24), будем считать, что время T
задано, но такое, что задача дифференциальной игры в период [𝑡0 , 𝑇] выполнена.
При таком назначении верхнего предела функционала (3) (интервала
управления, в котором может быть завершена дифференциальная игра) задача
построения управляющего процесса 𝜉 = 𝜉(𝑥(𝑡), 𝑢(𝑡), 𝑤(𝑡)) может рассматриваться
как задача синтеза оптимального управления с бесконечным интервалом управления
(𝑇 → ∞).
Определение 5.
Будем называть управляющий процесс 𝜉𝑟 = 𝜉(𝑥𝑟 (𝑡), 𝑢𝑟 (𝑡), 𝑤𝑟 (𝑡)), 𝑡 ∈ [𝑡0 , 𝑇𝑟 ], 𝑇𝑟 ≤ 𝑇
гарантирующим выполнение задачи дифференциальной игры, заключающейся в
достижении цели Ψ(𝑥𝑟 (𝑇𝑟 )) ≤ 𝑑, 𝑑 > 0, если 𝜉𝑟 доставляет локальный минимум
функционалу (24) на решениях системы (23) при
любых возмущениях w(t), удовлетворяющих ограничению. При этом 𝐽(𝜉𝑟 ) ≤ 𝐽(𝜉)
для любых управляющих процессов 𝜉 = 𝜉(𝑥(𝑡), 𝑢(𝑡), 𝑤(𝑡)), ∀𝑡 ∈ [𝑡0 , 𝑇𝑟 ], для
которых |Ψ(𝑥𝑟 (𝑇𝑟 ))| − |Ψ(𝑥(𝑇𝑟 ))| ≥ 0.
Глава 3. Синтез управления для системы глюкоза-инсулин.
3.1. Дискретизация.
Сделаем предложение о построении регулятора с дискретно изменяющимися
параметрами. Разобьем интервал [𝑡0 , 𝑇] на N отрезков. Начало каждого отрезка
имеет номер 𝑖0 , 𝑖1 , … , 𝑖𝑁−1 , которому соответствует состояние
системы𝑥0 , 𝑥1 , … , 𝑥𝑁−1 . Значения состояния системы 𝑥𝑖 , соответствующее началу
каждого из отрезков, определяет значения параметров матриц 𝐴(𝑥𝑖 ), 𝐵(𝑥𝑖 ), 𝐷(𝑥𝑖 ).
Эти матрицы используются для вычисления положительно-определенной матрицы
𝑆𝑖 .
П(𝑥)
[𝐵𝑇 (𝑥𝑖 )𝑅−1 𝐵(𝑥𝑖 ) − 𝐷𝑇 (𝑥𝑖 )𝑃−1 𝐷(𝑥𝑖 )] 𝑆(𝑥𝑖 ) +
𝑆(𝑥𝑖 )𝐴(𝑥𝑖 ) + 𝐴𝑇 (𝑥𝑖 )𝑆(𝑥𝑖 ) − 𝑆(𝑥𝑖 ) ⏞
+𝐶 𝑇 𝑄𝐶 = 0
28
(3.1)
Таким образом, матрица 𝑆(𝑥𝑖 ) вычисляется в интервале [𝑡0 , 𝑇] в счетном
количестве значений траектории 𝑥𝑖 , 𝑖 = ̅̅̅̅̅̅̅̅̅̅
0, 𝑁 − 1 . Вычисленное значение матрицы в i
̅̅̅̅̅
- момент используется в регуляторе на всем интервале 𝛾𝑖 − 𝛾𝑖+1 , 𝑖 = 0,
𝑁.
̅̅̅̅̅
Управления на каждом интервале 𝛾𝑗−1 − 𝛾𝑗 , 𝑖 = 1,
𝑁 определяются выражениями
𝑤𝑖 (𝑡) = 𝑃−1 𝐷𝑇 (𝑥)𝑆(𝑥𝑖 )𝑥(𝑡), 𝑢𝑖 (𝑡) = 𝑅−1 𝐵𝑇 (𝑥)𝑆(𝑥𝑖 )
(3.2)
Траектория движения объекта с управлениями (3.2) определяется решением
уравнения
П(𝑥)
𝑑𝑥(𝑡)
[𝐵𝑇 (𝑥𝑖 )𝑅−1 𝐵(𝑥𝑖 ) − 𝐷𝑇 (𝑥𝑖 )𝑃−1 𝐷(𝑥𝑖 )] 𝑆(𝑥𝑖 )𝑥(𝑡),
= 𝑓(𝑥) − ⏞
𝑑𝑡
̅̅̅̅̅
𝑥(𝑡0 ) = 𝑥0 , 𝑖 = 0,
𝑁.
Отметим, что продолжительность отрезка разбиения интервала [𝑡0 , 𝑇] зависит
от возможности устройства по реализации вычислений матрицы 𝑆𝑖 . Очевидно, что
при 𝜏 = 𝑡𝑖+1 − 𝑡𝑖 → 0, 𝑖 = ̅̅̅̅̅̅̅̅̅̅̅
0, 𝑁 − 1, , т.е. при уменьшении интервалов разбиения,
lim 𝑆(𝑥(𝑡𝑖 )) → 𝑆(𝑥(𝑡)) , 𝑖 = ̅̅̅̅̅̅̅̅̅̅
0, 𝑁 − 1.
𝜏→0
Для существования решения необходимо выполнение условия:
П(𝑥) ≥ 0, ∀𝑥 ∈ Ω𝑥
(3.3)
Или, иначе:
𝐵𝑇 (𝑥𝑖 )𝑅−1 𝐵(𝑥𝑖 ) − 𝐷𝑇 (𝑥𝑖 )𝑃−1 𝐷(𝑥𝑖 ) ≥ 0, 𝑃 = 𝑃(𝜎)
3.2. Практическая часть.
Рассмотрим модель Бергмана:
𝐺̇ (𝑡) = −𝑝1 [𝐺(𝑡) − 𝐺𝑏 ] − 𝑋(𝑡)𝐺(𝑡) + 𝐷(𝑡),
𝐺(0) = 𝐺0 ,
𝑋(𝑡) = −𝑝2̇ 𝑋(𝑡) + 𝑝3 [𝐼(𝑡) − 𝐼𝑏 ],
𝑋(0) = 0,
𝐼 (̇ 𝑡) = 𝛾[𝐺(𝑡) − ℎ]+ − 𝑛[𝐼(𝑡) − 𝐼𝑏 ] + 𝑢(𝑡),
𝐼(0) = 𝐼0,
Запишем её в SDC-представлении:
𝐺̇ (𝑡)
𝑝1
̇
(𝑋 (𝑡)) = ( 0
𝛾
𝐼 (̇ 𝑡)
𝐺(𝑡)
−𝑝2
0
𝐺(𝑡)
0
0
1
𝑝3 ) (𝑋(𝑡)) + (0) 𝑢(𝑡) + (0) 𝑤(𝑡)
−𝑛
𝐼(𝑡)
0
1
29
(1)
(3.4)
,где
𝑢(𝑡) = 𝑅−1 (𝑥)𝐵𝑇 (𝑥)𝑆(𝑥)𝑥(𝑡),
𝑤(𝑡) = 𝑃−1 (𝑥)𝐷𝑇 (𝑥)𝑆(𝑥)𝑥(𝑡),
а |𝑤(𝑡)| ≤ 𝜎(𝑤), притом 𝜎(𝑤)- максимальная скорость, с которой может
происходить абсорбция глюкозы. Для взрослого человека этот параметр, в среднем,
равен около 375 мг/мин[57], а S(x) является единственным, симметричным,
положительно-определенным решением матричного уравнения Риккати:
𝐴𝑇 (𝑥)𝑆(𝑥) + 𝑆(𝑥)𝐴(𝑥) + 𝑄(𝑥) − 𝑆(𝑥)𝐵(𝑥)𝑅−1 (𝑥)𝐵𝑇 (𝑥)𝑆(𝑥) = 0
Для существования решения необходимо выполнение условия (3.3), или
𝐵𝑇 (𝑥)𝑅−1 𝐵(𝑥) − 𝐷𝑇 (𝑥)𝑃−1 𝐷(𝑥) ≥ 0
Подставим матрицы из (3.4):
(0
0
0
−1
)𝑅
(
1
0) ≥ ( 1
1
Откуда:
𝑅−1 ≥ 𝑃−1
𝑅≤𝑃
30
1
−1
)𝑃
(
0 0
0)
0
Заметим, что представление (3.4) не единственно. Систему (1) также можно
представить в виде
𝐺̇ (𝑡)
𝑝1 + 𝑋(𝑡)
0
0
−𝑝2
(𝑋̇(𝑡)) = (
𝛾
0
𝐼 (̇ 𝑡)
𝐺(𝑡)
0
0
1
𝑝3 ) (𝑋(𝑡)) + (0) 𝑢(𝑡) + (0) 𝑤(𝑡)
−𝑛
𝐼(𝑡)
0
1
(3.5)
Однако данное представление не подходит для нашей задаче по той причине,
что пара A и B не является управляемой.
Подставив начальные значения, получим в системе Matlab следующий
результат:
>> A=[0.0316 0 0;0 -0.0107 0.00053;0.042 0 -0.064]
A=
0.0316 0
0
0 -0.0107 0.0005
0.0420
0 -0.0640
>> B=[0;0;1]
B=
0
0
1
Co=ctrb(A,B);
unco=length(A)-rank(Co)
unco =
1
, то есть ранг матрицы управляемости на единицу меньше размерности системы, то
есть, по критерию Каллмана, данная пара матриц не управляема.
Тогда как для исходного представления:
31
>> A=[0.0316 120 0;0 -0.0107 0.00053;0.042 0 -0.064]
A=
0.0316 120
0
0 -0.0107 0.0005
0.0420
0 -0.0640
>> B=[0;0;1]
B=
0
0
1
Co=ctrb(A,B);
unco=length(A)-rank(Co)
unco =
0
, то есть данная пара матриц управляема.
Далее, в системе Matlab:
A=[0.0316 200 0;0 -0.0107 0.00053;0.042 0 -0.064]
A=
0.0316 200.0000
0
0 -0.0107 0.0005
0.0420
0 -0.0640
>> [K,S,e]=lqr(A,b,Q,R)
K=
1.0e+003 *
0.0037 3.0922 0.0036
32
S=
1.0e+007 *
0.0000 0.0025 0.0000
0.0025 1.9927 0.0003
0.0000 0.0003 0.0000
e=
-3.1631
-0.2302 + 0.2302i
-0.2302 - 0.2302i
Представление системы в среде Simulink:
33
Список литературы
[1] International Diabetes Federation. IDF Diabetes Atlas 6th ed. IDF. Brussels, 2013.
[2] World Health Organization. Global Health Estimates: Deaths by Cause, Age, Sex and
Country, 2000-2012. Geneva, WHO, 2014.
[3]Toffolo, G., Bergman, R.N., Finegood, D.T., Bowden, C.R. and Cobelli, C. (1980)
Quantitative estimation of beta cell sensitivity to glucose in the intact organism - a
minimal model of insulin kinetics in the dog. Diabetes
[4]Bergman, R.N., Ider, Y.Z., Bowden, C.R. and Cobelli, C. (1979) Quantitative
estimation of insulin sensitivity. Am. J. Physiol. Endocrinol. Metab.
[5]Marián Tárník, Eva Miklovičová, Ján Murgaš, Ivan Ottinger, Tomáš Ludwig
(2014) Model Reference Adaptive Control of Glucose in Type 1 Diabetics: A Simulation
Study, Proceedings of the 18th IFAC World Congress
[6]Kadish AH. Automation control of blood sugar. I. A servomechanism for glucose
monitoring and control. Am J Med Electron 1964
[7]Albisser AM, Leibel BS, Ewart TG, Davidovac Z, Botz CK, Zingg W. An artificial
endocrine pancreas. Diabetes 1974;
[8]Pfeiffer EF, Thum C, Clemens AH. The artificial beta cell—a continuouscontrol of
blood sugar by external regulation of insulin infusion (glucose controlled insulin infusion
system). Horm Metab Res 1974;
[9] Mirouze J, Selam JL, Pham TC, Cavadore D. Evaluation of exogenousinsulin
homoeostasis by the artificial pancreas in insulin-dependentdiabetes. Diabetologia 1977;
[10] Kraegen EW, Campbell LV, Chia YO, Meler H, Lazarus L. Control of bloodglucose
in diabetics using an artificial pancreas. Aust N Z J Med 1977;
[11] Shichiri M, Kawamori R, Yamasaki Y, Inoue M, Shigeta Y, Abe H. Com-puter
algorithm for the artificial pancreatic beta cell. Artif Organs 1978;2(Suppl.)
[12] Clemens AH, Chang PH, Myers RW. The development of Biostator,a glucose
controlled insulin infusion system (GCIIS). Horm Metab Res1977;(Suppl. 7)
[13] Yatabe T, Yamazaki R, Kitagawa H, et al. The evaluation of the ability ofclosed-loop
glycemic control device to maintain the blood glucose con-centration in intensive care unit
patients. Crit Care Med 2011;
[14]D.T. Finegood, and D. Tzur," Reduced Glucose Effectiveness Associated With
Reduced Insulin Release: An Artifact of the Minimal-Model Method", Am J Physiol. Vol.
271, No. 3, 1996
[15]I.M. Tolic, E. Mosekilde, J. Sturis, Modeling the insulin-glucose feedback system:
The significance of pulsatile insulin secretion, J. Theor. Biol. 207 (2000) 361–375.
[16]R. Hovorka, V. Canonico, L.J. Chassin, U. Haueter, M. Massi-Benedetti, M.Orsini
Federici, T.R. Pieber, H.C. Schaller, L. Schaupp, T. Vering, and M.E. Wilinska,"
Nonlinear model predictive control of glucose concentration in subjects with type 1
diabetes", Physiol Meas Vol. 25, No. 4, 2004, pp. 905-920.
[17]Matthew Signal. Liam Fisk, Geoffrey M. Shaw and J. Geoffrey Chase (2014) A pilot
study of continuous glucose monitoring in critically ill patients:Do they perform well
enough for use in glycaemic control?, Proceedings of the 18th IFAC World Congress
34
[18]Marián Tárník, Eva Miklovičová, Ján Murgaš, Ivan Ottinger, Tomáš Ludwig
(2014) Model Reference Adaptive Control of Glucose in Type 1 Diabetics: A Simulation
Study, Proceedings of the 18th IFAC World Congress
[19]M.Penet, H.Gueguen, A.Belmiloudi, (2014) Artificial Blood Glucose Control using a
DDE Modelling Approach, Proceedings of the 18th IFAC World Congress
[20]Mark Lillelund Rousin, Ulrike Pielmeier, Steen Andreassen, (2014) Stability analysis
of insulin-glucose feedback in the Glucosafe pancreas model of endogenous insulin
production, Proceedings of the 18th IFAC World Congress
[21]P. Palumbo, G. Pizzichelli, P. Pepe, S. Panunzi, A. De Gaetano, (2014) Closed-loop
control scheme for the Euglycemic Hyperinsulinemic Clamp: validation on virtual
patients, Proceedings of the 18th IFAC World Congress
[22]Diego S. Carrasco, Yongji Fu, Graham C. Goodwin, Bruce R. King, Adrian M.
Medioli, (2014) Performance Limitations Arising in Closed Loop Control of Blood
Glucose in Type 1 Diabetes, Proceedings of the 18th IFAC World Congress
[23]Nor Azlan Othman, Paul D. Docherty, and J. Geoffrey Chase, Determining the
relative efficacy of a number of PID and PD models that relate insulin secretion to bolus
induced glucose excursions, Proceedings of the 18th IFAC World Congress
[24]P´eter Szalay, Gy¨orgy Eigner, Levente A. Kov´acs, Linear Matrix Inequality-based
Robust Controller design for Type-1 Diabetes Model, Proceedings of the 18th IFAC
World Congress
[25]Steil GM, Rebrin K, Darwin C, Hariri F, Saad MF Feasibility of automating insulin
delivery for the treatment of type 1 diabetes. Diabetes 2006;55:3344–3350
[26]Weinzimer SA, Steil GM, Swan KL, Dziura J, Kurtz N,Tamborlane WV. Fully
automated closed-loop insulin delivery versus semiautomated hybrid control in pediatric
patients with type 1 diabetes using an artificial pancreas. Diabetes Care 2008;31:934–939
[27]Hovorka R, Allen JM, Elleri D, et al. Manual closed-loop insulin delivery in children
and adolescents with type 1 diabetes: a phase 2 randomised crossover trial. Lancet
2010;375:743–751
[28]Hovorka R, Kumareswaran K, Harris J, Allen JM, Elleri D, Xing D, et al. Overnight
closed loop insulin delivery (artificial pancreas) in adults with type 1 diabetes: crossover
randomised controlled studies. BMJ 2011;342:d1855
[29] El-Khatib FH, Russell SJ, Nathan DM, Sutherlin RG, Damiano ER. A bihormonal
closed-loop artificial pancreas for type 1 diabetes. Sci Transl Med 2010;2:27ra27
[30] Kovatchev BP, Cobelli C, Renard E, et al. Multinational study of subcutaneous
model-predictive closed-loop control in type 1 diabetes mellitus: summary of the results. J
Diabetes Sci Technol 2010;4:1374–1381
[31] Kovatchev BP, Breton MD, Man CD, Cobelli C. In silico preclinical trials: a proof of
concept in closed-loop control of type 1 diabetes. J Diabetes Sci Tech 2009;3:44–55
[32] Dassau E, Zisser H, Palerm CC, Buckingham BA, Jovanovič L, Doye III FJ. Modular
artificial β-cell system: a prototype for clinical research. J Diabetes Sci Technol
2008;2:863-872
[33] Newsroom Editor. Artificial Pancreas: What's the status? URL:
https://ec.europa.eu/digital-agenda/en/news/artificial-pancreas-whats-status, (дата
обращения 29.04.2015)
35
[34] Emmanuel Barraud. A chip placed under the skin for more precise medicine. URL:
http://actu.epfl.ch/news/a-chip-placed-under-the-skin-for-more-precise-medi/ (дата
обращения 28.05.2015)
[35]V.W. Bolie," Coefficients of normal blood glucose regulation", Journal of Applied
Physiology Vol. 16, No. 5, 1961.
[36]E. Ackerman, L.C. Gatewood, J.W. Rosevear, and G.D. Molnar," Model studies of
blood-glucose regulation", Bull Math Biophys Vol. 27, 1965.
[37]D.P. Frost, M.C. Srivastava, R.H. Jones, J.D. Nabarro, and P.H. Sonksen," The
Kinetics of Insulin Metabolism In Diabetes Mellitus", Postgrad Med J. Vol. 49, 1973, pp.
949-954.
[38]R.O. Foster, J.S. Soeldner, M.H. Tan, and J.R. Guyton," Short Term Glucose
Homeostasis In Man: A System’s Dynamics Model", J. Dyn. Syst. Meas. Control Vol. 95,
1973, pp. 308-314.
[39]J.T. Sorensen," A physiologic model of glucose metabolism in man and its use to
design and assess improve insulin therapies for diabetes", [Ph. D Thesis], Department of
Chemical Engineering, MIT, Cambridge, MA, 1985.
[40]E. Salzsieder, U. Albrecht, U. Fischer, and E. Freyse," Kinetic modeling of the
glucoregulatory system to improve insulin therapy", IEEE Trans Biomed Eng Vol. 32,
1985, pp. 846-855.
[41]C. Cobelli, G. Federspil, G. Pacini, A. Salvan, and C. Scandellari," An integrated
mathematical model of the dynamics of blood glucose and its hormonal control",
Mathematical Biosciences Vol. 58, No. 1, 1982, pp. 27-60.
[42]G. M. Steil, B. Clark, S. Kanderian, and K. Rebrin," Modeling insulin action for
development of a closed-loop artificial pancreas", Diabetes Technol Ther Vol. 7, No. 1,
2005, pp. 94-108.
[43]C. Cobelli, G. Pacini, G. Toffolo, and L. Sacca," Estimation of insulin sensitivity and
glucose clearance from minimal model: new insights from labeled IVGTT", Am J Physiol
Vol. 250, No. 5 Pt 1, 1986, pp. E591-598.
[44]C. Cobelli, A. Caumo, and M. Omenetto," Minimal model SG overestimation and SI
underestimation: improved accuracy by a Bayesian two-compartment model", Am J
Physiol Vol. 277, No. 3 Pt 1, 1999, pp. E481-488
[45]R. Hovorka, F. Shojaee-Moradie, P.V. Carroll, L.J. Chassin, I.J. Gowrie, N.C.
Jackson, R.S. Tudor, A.M. Umpleby, and R.H. Jones," Partitioning glucose
distribution/transport, disposal, and endogenous production during IVGTT", Am. J.
Physiol. Endocrinol Metab. Vol. 282, No. 5, 2002, pp. 992-1007
[46]G. Toffolo, and C. Cobelli," The Hot IVGTT Two-Compartment Minimal Model: An
Improved Version", Am J Physiol Endocrinol Metab. Vol. 284, No. 2, 2003, pp. E317321.
[47]K.M. Krudys, M.G. Dodds, S.M. Nissen, and P. Vicini," Integrated Model of Hepatic
and Peripheral Glucose Regulation For Estimation of Endogenous Glucose Production
During the Hot IVGTT", Am J Physiol Endocrinol Metab. Vol. 288, No. 5, 2005, pp.
E1038-1046.
[48]A. Roy, and R.S. Parker," Dynamic modeling of free fatty acid, glucose, and insulin:
an extended "minimal model" ", Diabetes Technol Ther Vol. 8, No. 6, 2006, pp. 617-626.
36
[49]A. De Gaetano, O. Arino, Mathematical modelling of the intravenous glucose
tolerance test, J. Math. Biol. 40 (2000) 136–168
[50]H.J. Sussmann. From the brachystochrone to the maximum principle and back.
Proceedings of the 35th IEEE Conference on Decision and Control, pages 1588{1593,
December 1996.
[51]J. Primbs. Nonlinear Optimal Control: A Receding Horizon Approach. PhD thesis,
California Institute of Technology, 1999.
[52]H. Khalil.Nonlinear Systems. Prentice Hall, 3rd edition, 2002.
[53]Cloutier J.R., Souza C.N., Mracek C.P. Nonlinear Regulation and Nonlinear 𝐻∞
Control via the State-Dependent Riccati Equation Technique // 1st International
Conference of Nonlinear Problems in Aviation and Aerospace, Daytona. FL. 1996. P. 117141.
[54]C.N. D'Souza, J.R. Cloutier and C.P. Mracek. Nonlinear regulation and nonlinear H1
control via the state-dependent riccati equation technique: Part 1, theory; part 2: Examples.
Proceedings of the First International Conference on Nonlinear Problems in Aviation and
Aerospace., pages 117{141, 1996.
[55]Pearson, J.D. (1962). Approximation methods in optimal control. Journal of
Electronics and Control, 13, 453-469.
[56]Wernli, A. and G. Cook (1975). Suboptimal control for the nonlinear quadratic
regulator problem. Automatica 11, 75-84
[57] Guyton AC, Hall JE. Chapter 27: Urine Formation by the Kidneys: II Tubular
processing of the Glomerular Filtrate. In: Textbook Of Medical Physiology (11th Edition).
Guyton AC, Hall JE (Eds). Elsevier Saunders, Philadelphia, Pennsylvania, 327–347
(2006).
37