Открыть - Северо-Кавказский горно
advertisement

Б. Д. Хасцаев
ПРОЕКТИРОВАНИЕ СИСТЕМ
ОТОБРАЖЕНИЯ ИНФОРМАЦИИ НА ОСНОВЕ
МНОГОРАЗРЯДНЫХ И МАТРИЧНЫХ
ИНДИКАТОРОВ
Монография
Владикавказ 2015
0
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ РФ
Федеральное государственное бюджетное образовательное учреждение
высшего профессионального образования
"СЕВЕРО-КАВКАЗСКИЙ ГОРНО-МЕТАЛЛУРГИЧЕСКИЙ ИНСТИТУТ
(ГОСУДАРСТВЕННЫЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ)"
Кафедра промышленной электроники
Б. Д. Хасцаев
ПРОЕКТИРОВАНИЕ СИСТЕМ
ОТОБРАЖЕНИЯ ИНФОРМАЦИИ НА ОСНОВЕ
МНОГОРАЗРЯДНЫХ И МАТРИЧНЫХ
ИНДИКАТОРОВ
Монография
Владикавказ 2015
1
УДК 621.38
ББК 32.973.2
Х24
Рецензенты:
Доктор технических наук, профессор
НПК "Югцветметавтоматика"
Сошкин С. В.,
доктор технических наук, профессор
Северо-Кавказского горно-металлургического института
(государственного технологического университета)
Гончаров И. Н.
Х24
Хасцаев Б. Д.
Проектирование систем отображения информации на основе многоразрядных и матричных индикаторов / Б. Д. Хасцаев; Северо-Кавказский горно-металлургический институт (государственный технологический университет). – Владикавказ: Северо-Кавказский горно-металлургический институт (государственный технологический университет). Изд-во «Терек», 2015. – 96 с.
УДК 621.38
ББК 32.973.2
Редактор Иванченко Н. К.
Компьютерная верстка Цишук Т. С.
ФГБОУ ВПО СКГМИ (ГТУ), 2015
Хасцаев Б. Д., 2015
ISBN
2
ОГЛАВЛЕНИЕ
Введение..................................................................................................... 6
1. ЖИДКОКРИСТАЛЛИЧЕСКИЕ ИНДИКАТОРЫ
И ПРОЕКТИРОВАНИЕ НА ИХ ОСНОВЕ СИСТЕМ
ОТОБРАЖЕНИЯ ИНФОРМАЦИИ ......................................................... 8
1.1. ЖКИ: конструкция и принцип действия ................................ –
1.2. Способы снижения времени выключения ЖКИ ....................10
1.3. Способы управления одноразрядными ЖКИ.........................12
1.4. Проектирование систем управления
многоразрядными ЖКИ ..................................................................15
1.4.1. Проектирование систем управления,
реализующих статический режим работы
многоразрядных ЖКИ .............................................................16
1.4.2. Проектирование систем управления,
реализующих динамические режимы работы
многоразрядных ЖКИ .............................................................17
2. ВАКУУМНО-ЛЮМИНЕСЦЕНТНЫЕ ИНДИКАТОРЫ
И ПРОЕКТИРОВАНИЕ НА ИХ ОСНОВЕ СИСТЕМ
ОТОБРАЖЕНИЯ ИНФОРМАЦИИ .........................................................23
2.1. ВЛИ: конструкция, разновидности конструктивного исполнения и принцип действия ........................................................ –
2.2. Проектирование систем управления многоразрядными
ВЛИ ...................................................................................................25
2.2.1. Проектирование систем управления, реализующих
статический режим работы многоразрядных ВЛИ ............... –
2.2.2. Проектирование систем управления, реализующих
динамические режимы работы многоразрядных ВЛИ .........26
2.3. Методика проектирования систем управления для СОИ,
реализуемых на основе многоразрядных ВЛИ .............................33
3. ПРОЕКТИРОВАНИЕ УCТРОЙСТВ РУЧНОГО ВВОДА
ДАННЫХ ДЛЯ СОИ.................................................................................35
3.1. Проектирование УРВД с линейной адресацией клавиш....... –
3.2. Проектирование УРВД с двухкоординатной
адресацией клавиш ..........................................................................37
4. ПРОЕКТИРОВАНИЕ МИКРОПРОЦЕССОРНЫХ СИСТЕМ
УПРАВЛЕНИЯ ИНДИКАТОРАМИ ДЛЯ СОИ.....................................40
4.1. Развитие возможностей СОИ на основе
микропроцессоров ........................................................................... –
3
4.2. Проектирование микропроцессорных систем
управления дискретными индикаторами.......................................42
4.3. Пример проектирования микропроцессорной
системы управления дискретным индикатором
(на примере светофора) ...................................................................44
5. МАТРИЧНЫЕ ИНДИКАТОРЫ И ПРОЕКТИРОВАНИЕ
НА ИХ ОСНОВЕ СИСТЕМ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ ........51
5.1. Газоразрядные индикаторные панели ....................................52
5.1.1. ГИП постоянного тока с внешней
адресацией (ГИПП) ..................................................................54
5.1.2. ГИП с самосканированием (ГИПС) .............................57
5.1.3. ГИП переменного тока ..................................................60
5.2. Способы управления матричными индикаторами
и их реализация ................................................................................65
5.2.1. Способы адресации ячеек матричных индикаторов ...66
5.2.1.1. Способ однокоординатной адресации .................. –
5.2.1.2. Способ двухкоординатной (матричной)
адресации .............................................................................–
5.2.1.3. Способ многоматричной адресации .....................70
5.2.1.4. Способ адресация со сканированием ...................72
5.2.2. Способы модуляции яркости свечения
ячеек матричных индикаторов................................................73
5.3. Проектирование систем управления газоразрядными
индикаторными панелями ...............................................................74
5.3.1. Проектирование системы управления ГИП
постоянного тока с внешней адресацией ...............................75
5.3.2. Проектирование системы управления ГИП
с самосканированием ...............................................................78
5.3.3. Проектирование системы управления ГИП
переменного тока .....................................................................80
6. СВЕТОДИОДНЫЕ ЭКРАНЫ И ПРОЕКТИРОВАНИЕ
НА ИХ ОСНОВЕ СИСТЕМ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ ........83
6.1. Светодиоды и их характеристики ........................................... –
6.2. Пиксель и его характеристики .................................................85
6.3. Светодиодный модуль и его характеристики.........................87
6.4. Светодиодный экран, особенности его
конструктивного исполнения и характеристики ..........................88
6.5. Проектирование систем управления пикселем,
модулем и СДЭ ................................................................................90
4
6.5.1. Проектирование системы управления пикселем
СДЭ............................................................................................90
6.5.2. Проектирование системы управления модулем
СДЭ............................................................................................91
6.5.3. Проектирование системы управления СДЭ ................92
ЗАКЛЮЧЕНИЕ .........................................................................................94
ЛИТЕРАТУРА ...........................................................................................95
5
Введение
Улучшение характеристик систем отображения информации
(СОИ) и расширение их функциональных возможностей являются
важными задачами разработчиков электронной аппаратуры, так как во
всех современных технических средствах использование СОИ обязательно. С другой стороны, улучшение характеристик СОИ и расширение их функциональных возможностей возможны из-за появления новых индикаторных устройств (индикаторов), развития интегральной
микроэлектроники, средств микропроцессорной техники и их незамедлительного внедрения во вновь разрабатываемых устройствах и
системах отображения информации. К примеру, использование в составе СОИ перспективных микропроцессоров в качестве основы системы управления индикаторами обеспечивает существенное улучшение характеристик и расширение функциональных возможностей
СОИ. Другим примером является появление видеодисплеев и специального математического обеспечения для них.
Большой интерес в последние десятки лет вызывают СОИ, разрабатываемые на основе многоразрядных (жидкокристаллических, вакуумно-люминесцентных и т. д.) и матричных индикаторных устройств
(газоразрядных, светодиодных и др.). Чаще всего многоразрядные индикаторные устройства выполняются в виде монодисплеев, из-за чего
значимость таких индикаторов высока.
Общим свойством многоразрядных и матричных индикаторов является обеспечение большой информационной емкости по сравнению
с одноразрядными индикаторными устройствами.
Необходимо отметить, что в предлагаемой работе многоразрядные индикаторные устройства рассматриваются только на примере
жидкокристаллических и вакуумно-люминесцентных индикаторов, а
матричные индикаторы – на примере газоразрядных индикаторных
панелей и светодиодных экранов. Эти индикаторы наиболее востребованы разработчиками технической аппаратуры.
Как в устройствах отображения информации, так и в СОИ, широко используются устройства ручного ввода данных, реализация которых представляет большой интерес, их рассмотрение актуально.
Использование микропроцессоров в схемах управления индикаторами ставит перед разработчиками СОИ ряд новых задач, связанных с освоением системных средств микропроцессоров, правильной
организацией пользовательского интерфейса, расширением функциональных возможностей видеодисплеев.
6
Таким образом, отмеченное предопределяет назначение предлагаемой работы – ознакомление студентов с физическими характеристиками многоразрядных (жидкокристаллических и вакуумнолюминесцентных) и матричных (газоразрядных и светодиодных) индикаторов дисплейной конструкции, с электрооптическими параметрами этих индикаторов.
Работа знакомит студентов со способами управления перечисленными индикаторами, а также со схемами управления индикаторами, реализованными на базе интегральных микросхем средней и высокой степени интеграции, включая микропроцессоры.
Существенное внимание в работе уделено общим вопросам проектирования СОИ, включая вопросы формализации процессов проектирования СОИ с улучшенными характеристиками и расширенными
функциональными возможностями. В ней рассматриваются и способы
проектирования таких важных составляющих СОИ, как устройства
ручного ввода данных и микропроцессорные системы управления индикаторными устройствами.
Таким образом, в монографии, главным образом, анализируются
наиболее перспективные индикаторы, изучаются их характеристики и
свойства, особенности их конструктивного исполнения и подключения в электрическую цепь, приводятся результаты исследований
принципов построения систем управления индикаторами, выбранными как наиболее перспективные, рассматриваются особенности построения этих систем.
7
1. ЖИДКОКРИСТАЛЛИЧЕСКИЕ ИНДИКАТОРЫ
И ПРОЕКТИРОВАНИЕ НА ИХ ОСНОВЕ СИСТЕМ
ОТОБРАЖЕНИЯ ИНФОРМАЦИИ
Жидкокристаллические индикаторы (ЖКИ) благодаря ряду достоинств: низкое потребление электроэнергии, малый вес, дешевизна,
высокая надежность, широко используются для отображения информации. На их основе строятся СОИ, широко применяемые в жизни
человека, в научных исследованиях, в производстве и т. д. Главной
составляющей этих СОИ, как и других, являются системы управления
индикаторными устройствами.
Рассмотрим наиболее важные вопросы, знание которых необходимо при проектировании СОИ на основе ЖКИ.
Достоинства ЖКИ:
– низкий уровень рабочих напряжений;
– низкая потребляемая мощность;
– высокий контраст;
– компактная конструкция, включая малую толщину;
– большая долговечность.
Недостатки ЖКИ:
– малое быстродействие (значительная инерционность);
– ограниченность температурного диапазона;
– малый угол обзора.
ЖКИ появились впервые в 70-х годах в виде дискретных знакосинтезирующих индикаторов и были применены в электронных часах.
Затем появились матричные ЖКИ индикаторы и фирма Sharp (Япония) первая на их основе выпустила черно-белый телевизор с экраном
5,5 дюйма с разрешением 160 х 120.
В настоящее время ЖКИ занимают доминирующее положение
при создании высокоэкономичных СОИ индивидуального пользования.
Как известно, главным составляющим элементом ЖКИ является
жидкий кристалл, который и определяет важнейшие свойства ЖКИ.
1.1. ЖКИ: конструкция и принцип действия
Для правильного проектирования СОИ на основе ЖКИ, подобно
другим индикаторным устройствам, необходимо хорошее знание технических характеристик, конструкции и работы этих индикаторов.
Однако из-за ограниченного объема настоящей работы ознакомление
8
с техническими характеристиками ЖКИ оставлено на самостоятельную работу студентов, рассматриваются только конструкция и работа
ЖКИ.
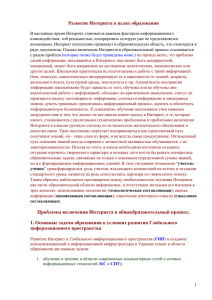
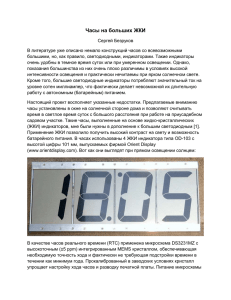
Особенности конструктивного исполнения ЖКИ показаны на
рис.1.1а, а его электрическая схема на примере семисегментного индикатора – на рис. 1.1б.
На рис.1.1а приняты следующие обозначения: 1, 3 – стеклянные
пластины; 4 – отражающий непрозрачный электрод (задний электрод
ЖКИ); 5 – прозрачный электрод (передний); 6 – жидкий кристалл.
На рис.1.1б приняты следующие обозначения: ОЭ – отражающий
(общий) электрод; a, b, c, d, e, f, g – аноды-сегменты ЖКИ.
Способы управления ЖКИ, жидкокристаллическими индикаторными панелями зависят от особенностей их физических свойств. К
примеру, использование переменного напряжения обеспечивает ЖКИ
на порядок большую долговечность, чем использование постоянного
напряжения.
а
б
1
2
3
5
ОЭ
4
a
b
f
g
c
e
6
2
d
Рис. 1.1. Конструкция ЖКИ (а) и его электрическая схема (б)
Меньшая долговечность при использовании постоянного напряжения связана с миграцией примесей к ОЭ под воздействием постоянной составляющей управляющего сигнала. Это явление приводит к
снижению контрастности ЖКИ и необходимости увеличения напряжения возбуждения. Поэтому более целесообразным является возбуждение ЖКИ переменным напряжением, что обеспечивается подачей на
электроды ЖКИ импульсов прямоугольной формы одинаковой полярности, которые должны быть сдвинуты по фазе так, чтобы управляю9
щее напряжение представляло собой биполярный сигнал, не имеющий
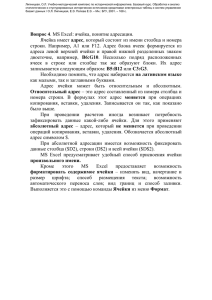
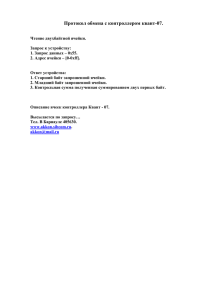
постоянной составляющей. Другая особенность ЖКИ связана со значительной их инерционностью при возбуждении и снятии возбуждения. Они включаются с запаздыванием в среднем на 10…20 мс (tр –
время реакции) по отношению к фронту возбуждающего импульса, а
время выключения (tрел – время релаксации) примерно в 10 раз превышает время включения и составляет 100…200 мс.
Параметры ЖКИ в динамическом режиме приведены на рис.1.2.
Uвозб
t
а
Iяя
t
tp
р
б
tpел
рел
Рис.1.2. Импульс управляющего напряжения – Uвозб (а)
и ток через ячейку – Iя (б)
Проектирование эффективных систем для отображения информации на основе ЖКИ возможно при снижении времени их выключения.
Отсюда следует важность способов снижения времени выключения
ЖКИ.
1.2. Способы снижения времени выключения ЖКИ
Существует ряд схемных способов снижения времени релаксации
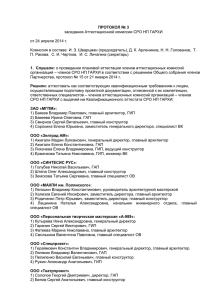
ЖКИ, т. е. способов снижения времени выключения ЖКИ. Рассмотрим из них два, которые условно назовем как способ импульса большой амплитуды и способ импульса высокой частоты.
Первый способ (СА) представлен на рис.1.3а, из которого видно,
что способ предусматривает после снятия импульса возбуждения Uвозб
через несколько миллисекунд подачу на ячейку жидкого кристалла
короткого импульса относительно большой амплитуды Uгаш. Это
обеспечивает ускорение процесса нейтрализации ионов, накопленных
в жидком кристалле за время действия управляющего импульса. Иначе, обеспечивает ориентацию дипольных моментов молекул жидких
10
кристаллов параллельно вектору напряженности электрического поля.
В результате обеспечивается более быстрое прекращение рассеяния
света, поэтому t'рел << tрел.
а
Uгаш >> Uвозб
t'рел << tрел
б
fгаш >> fя
t'рел << tрел
Рис. 1.3. Диаграммы напряжений и токов при разных способах
уменьшения времени релаксации ЖКИ
11
Недостаток способа связан с необходимостью использования генератора импульсов высокого напряжения. Этот недостаток исключен
в способе, представленном на рис.1.3б, из которого видно, что способ
предусматривает, во-первых, использование переменного тока для
возбуждения ячеек кристалла. Во вторых, способ предусматривает
после прекращения возбуждающего напряжения (Uвозб) подачу сигнала высокой частоты в диапазоне от 10 до 400 кГц в течение нескольких миллисекунд (Uгаш). В результате происходит более быстрое гашение ячейки и снижение времени релаксации (времени выключения
ЖКИ). Таким путем достигается сокращение времени релаксации tрел
до 5…10 мс.
1.3. Способы управления одноразрядными ЖКИ
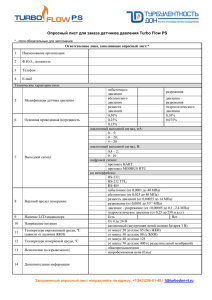
Существуют два способа управления или возбуждения ЖКИ: частотный и фазовый. Оба способа удобнее всего рассмотреть на примерах схемных реализаций. Пример схемной реализации частотного
способа возбуждения ЖКИ приведен на рис.1.4, а диаграмма напряжений на элементах схемы – на рис.1.5.
сигнал
управления
DD1
1
ОЭ
DD2
U п ( 2U возб )
&
И
+
_
Rк
fвозб =
30...500Гц
DD3
&
Uп
2
С
DD4
1
VT
fгаш =
10...400кГц
Рис.1.4. Схема возбуждения ЖКИ частотным способом
Схема состоит из: инвертора (DD1); двух схем И с двумя входами
(DD2, DD3); схемы ИЛИ с двумя входами (DD4); транзисторного
ключа, построенного на основе транзистора VT и Rк. Питающее
напряжение Uп равно удвоенной амплитуде постоянного напряжения
возбуждения (примерно 40 В). На один из входов схемы И (DD2) подается напряжение возбуждения низкой частоты в диапазоне: 30…500 Гц, на
вход другой схемы И (DD3) – напряжение высокой частоты в диапазоне: 10…400 кГц. С коллектора VT на сегмент (С) индикатора (И)
подаются импульсы прямоугольной формы с амплитудой 40 В и с ча12
стотой, равной частоте возбуждающего напряжения. К отражающему
электроду (ОЭ) индикатора приложено постоянное напряжение для
компенсации постоянной составляющей возбуждающего сигнала. В
результате вычитания уровней напряжений на коллекторе VT и на ОЭ
формируются двухполярные импульсы прямоугольной формы между
электродами ЖКИ ( между ОЭ и С), как показано на рис.1.5. В момент
времени подачи сигнала управления с целью включения сегмента
ЖКИ на выходе схемы DD2 формируется положительный сигнал, переключающий транзистор VT1 с частотой возбуждения 30…500 Гц. В
то же время на выходе схемы DD3 сигнал отсутствует. С момента изменения полярности сигнала управления на выходе схемы DD3 появляется сигнал, соответствующий напряжению гашения сегмента с частотой в диапазоне: 10…400 кГц.
Рис.1.5. Диаграммы напряжений при частотном способе возбуждения ЖКИ
Фазовый способ возбуждения ЖКИ также рассмотрим на примере
схемной реализации, приведенной на рис.1.6. Диаграммы напряжений
на элементах этой схемы приведены на рис.1.7. Как видно из схемы,
фазовый способ предусматривает подачу на входы схем И (DD2, DD3)
импульсов прямоугольной формы с частотой в диапазоне: 15…25 Гц,
сдвинутых по фазе относительно друг друга на 1800.
В фазовом способе возбуждения ЖКИ на сегменты и общий электрод ОЭ подаются напряжения различных фаз в зависимости от уровня сигнала управления. Сегмент не возбуждается и не участвует в
13
отображении информации при совпадении фаз на электродах индикатора (см. рис.1.7а).
ОЭ
сигнал
управления
DD1
1
И
DD2
&
t
fвозб = 15...25Гц
t
DD3
&
Rк2
Rк1
+
_
Uп
С
DD4
VT2
1
VT1
Рис.1.6. Схема возбуждения ЖКИ фазовым способом
Рис. 1.7. Диаграммы напряжений при фазовом способе возбуждения ЖКИ
Возбуждение происходит только при различных фазах (см.
рис.1.7б). Диаграммы напряжений, приведенные на рис.1.7, дополнительно поясняют принцип фазового возбуждения ЖКИ.
14
Преимуществом фазового способа по сравнению с частотным
способом является снижение потребляемого напряжения питания
вдвое, использование одного источника питания схемы. Однако при
фазовом способе не всегда удается снизить время выключения ЖКИ.
Поэтому недостатком данного способа по сравнению с частотным
способом является меньшая скорость смены отображаемой информации. Средняя скорость при фазовом способе отображения знаков на
ЖКИ составляет до 5 знаков в секунду. Такая скорость (частота) смены информации может быть использована в цифровых приборах,
калькуляторах, электронных часах и т. д. При необходимости отображения информации с большими частотами смены информации в СОИ
с ЖКИ целесообразнее использование частотного способа возбуждения ЖКИ.
1.4. Проектирование систем управления многоразрядными ЖКИ
Нетрудно определить, что многоразрядные ЖКИ используются
при проектировании СОИ с большой информационной емкостью. При
этом, если применяются ЖКИ дискретного исполнения, рассчитанные
на одно знакоместо, то системы управления в этом случае могут строиться двумя способами, один из которых обеспечивает статический
режим индикации информации, а другой – динамический. Если же
применяются ЖКИ монодисплейного исполнения, рассчитанные на
много знакомест, то в этом случае системы управления могут строиться только одним способом, обеспечивающим динамический режим
индикации информации (возможны разновидности этого режима, как
это будет показано ниже). Таким образом, как в случае с другими индикаторами управление многоразрядными ЖКИ осуществляется в
двух режимах: статическом и динамическом. Этим режимам соответствуют свои специальные системы управления, проектирование которых отличается друг от друга. В связи с этим, вначале рассмотрим
проектирование систем управления, обеспечивающих работу многоразрядных ЖКИ в статическом режиме, а затем – в динамическом.
1.4.1. Проектирование систем управления, реализующих
статический режим работы многоразрядных ЖКИ
Принципы построения систем управления (СУ), обеспечивающих
работу многоразрядных ЖКИ (МЖКИ) в статическом режиме, следуют из рис.1.8.
15
На рисунке приняты следующие обозначения: ОЭ1 … ОЭN – отражающие электроды; И1 … ИN – разряды МЖКИ; КВС – ключи выбора
сегментов;
Дш1 … ДшN – дешифраторы; Рг1 … РгN – регистры ОЗУ; n – число
сегментов ЖКИ; с – разрядность регистров (с = ]log2M[, где М – длина
алфавита знаков. Логарифм в скобках означает, во первых, равенство
величины с только целому числу, во вторых, величина с выбирается с
учетом дробной части логарифма. Последнее означает, что при наличии даже самой малой дробной части в логарифме к целой части логарифма добавляется 1); N – число разрядов МЖКИ.
Как видно из рис.1.8, каждый разряд МЖКИ (И1 … ИN) подключен к регистрам оперативной памяти (Рг1 … РгN), составляющих ОЗУ.
Коды отображаемых знаков алфавита, хранящихся временно в регистрах, в режиме визуализации информации преобразуются в n-разрядные сегментные коды индикаторов с помощью дешифраторов
Дш1 … ДшN. Кодовые слова с выходов дешифраторов Дш1–ДшN подаются на входы ключей выбора сегментов – КВС и далее непосредственно на сегменты разрядов МЖКИ. Электроды ОЭ1 … ОЭN соединены с питающим напряжением постоянного тока Un.
+U
ОЭ1
ОЭ2
И1
И2
n
1
n
Рг1
ДшN
c
1
n
1
Дш2
c
1
КВСN
n
1
n
1
КВС2
Дш1
п
ИN
n
1
КВС1
1
ОЭN
c
1
Рг2
РгN
ОЗУ
Рис. 1.8. Структура системы управления МЖКИ при статическом режиме
Достоинством подобной схемы управления является возможность
полного использования контраста знакоместа, поскольку время возбуждения свечения сегментов равно длительности цикла индикации.
Недостатком схемы является большое число дешифраторов и
ключей выбора сегментов из-за необходимости иметь для каждого
16
индикатора (знакоместа) свой дешифратор, блок ключей. Поэтому
число внутрисхемных соединений велико, определяемое как произведение числа выходов одного разряда (число сегментов одного индикатора) на число всех разрядов (число разрядов многоразрядного ЖКИ).
1.4.2. Проектирование систем управления, реализующих
динамические режимы работы многоразрядных ЖКИ
Динамические режимы работы ЖКИ предусматривают последовательную во времени работу пространственно разделенных разрядов
индикатора. Для МЖКИ наиболее часто используемы две разновидности способа управления в динамическом режиме отображения информации: с последовательной выборкой знакоместа (разряда индикатора) и с последовательной выборкой знака.
Структурная схема системы управления, обеспечивающей работу
ЖКИ в динамическом режиме с последовательной выборкой знакоместа, представлена на рис.1.9. Схема состоит из распределителя знакоместа Рзм , формирователей Ф1 … ФN, индикаторов И1 … ИN, блока
сегментных ключей – БСК, дешифратора знаков – ДшK, мультиплексора MS и регистров памяти Рг1 … РгN, образующих ОЗУ.
Схема работает следующим образом. Распределитель знакомест
РЗМ последовательно через формирователи Ф1 … ФN возбуждает все
разряды ЖКИ (И1 … ИN), на которые синхронно с помощью мультиплексора МS (управляемого счётчиком Ст) с регистров памяти подается
информация в виде двоичных кодов, подлежащая индикации на многоразрядном ЖКИ. Развертка знакомест показана на рис.1.10, а состояния
кодовых сигналов на входе и выходе РЗМ приведены в табл. 1.1.
Один такт распределителя знакомест равен:
Тр = N·τp,
где τp – время возбуждения одного разряда;
N – число разрядов (индикаторов, знакомест).
Частота распределителя fp = 1 / Tp должна быть выше критической частоты мельканий – fкчм. Для рассматриваемого режима средняя
яркость отображения знаков Вср определяется по формуле:
Вср
17
Встат
.
N
1
2
U1
Ф1
N
U2
ФN
Ф2
ОЭ1
ОЭN
ОЭ2
И1
UN
+U
п
ИN
И2
N
РЗМ
1 2
n
n
1 2
1 2
1 2
n
n
1
БСК
n
1 2
Дш
Ст
ГТИ
1
&
k
1 2
C
Ms
c
1
c
1 2
k
1 2
Рг1
k
РгN
ОЗУ
Рис. 1.9. Структурная схема системы управления МЖКИ в динамическом
режиме работы с последовательной выборкой знакоместа
Цикл
1
2
Такт
Вход
1
2
.
.
.
N
1
2
.
.
.
N
1
1
.
.
.
1
1
1
.
.
.
1
18
Таблица 1.1
Выход
12 … N
10…0
01…0
.
.
.
00 … 1
10…0
01…0
.
.
.
00…1
Рис. 1.10. Диаграммы импульсов управления в системах управления МЖКИ в
динамическом режиме работы с последовательной выборкой знакоместа
Структурная схема системы управления МЖКИ в динамическом
режиме с последовательной выборкой знака алфавита приведена на
рис.1.11. Как видно из рисунка, схема состоит из генератора фазовых
констант (ГФК), дешифратора знаков (Дшз), двоичного дешифратора
(Дшд), схем сравнения (СС1 … ССN), формирователей (Ф1 … ФN), индикаторов – разрядов МЖКИ (И1 … ИN) и регистров памяти (Рг1 … РгN ), образующих ОЗУ.
Работа системы управления связана с тем, что дешифратор знаков
Дшз последовательно и синхронно с ГФК синтезирует коды знаков
алфавита (к примеру, двоичные коды цифр от 0 до 9) параллельно на
всех знакоместах (разрядах). В то же время информация с регистров
(Рг1 … РгN) подается на входы схем сравнения от СС1 до ССN , на другие входы которых подается информация с выхода дешифратора Дшд.
Коды на выходе Дшд соответствуют знакам алфавита. При обнаружении схемами сравнения СС1 … ССN совпадения кодов на соответствующие разряды МЖКИ через формирователи Ф1 … ФN подаются сигналы разрешения отображения данного знака. Другими словами,
19
отображение знака разрядом ЖКИ происходит только в момент совпадения кодов, поступающих от регистра и генератора ГФК. Рис.1.11
показывает, что совпадение этих кодов определяется схемами сравнения кодов СС1 … ССN . Пример построения схемы сравнения кодов
приведен на рис.1.12.
ОЗУ
РгN
Рг1
c
1
1
0 0
1 1
Дшд
1
ГФК
kk
c
1
1
СС1
c
c
1
1
c
c
ССN
c
Ф1
0
1
Дшз
1
2
ФN
ОЭ1
ОЭN
И1
k
ИN
n
1
n
1
n
Рис. 1.11. Структурная схема системы управления МЖКИ в динамическом
режиме с последовательной выборкой знака
Приведенная схема СУ не имеет ограничений по числу разрядов,
так как работает с постоянной скважностью, равной
Q = 1/M,
где М – число знаков.
Так как при отображении арабских цифр от 0 до 9 М = 10, то
скважность Q определяется как Q = 1/М = 1/10 = 0,1. Тогда средняя
яркость отображения знаков определится по формуле:
20
Вср
Встат
Встат Q
М
и будет равной – 0,1 Встат .
Из-за малой скважности динамическое управление с последовательной выборкой знака имеет ограниченные возможности при использовании его применительно к МЖКИ с малым контрастом (с малой яркостью свечения).
Из принципа действия системы управления очевидно, что кодовая
комбинация на выходе дешифратора знаков Дшз сравнивается со всеми кодовыми комбинациями с выходов регистров Рг1 … РгN. Понятно,
если кодовую комбинацию на выходе Дшз обозначить как х1 х2 … хn , а
кодовые комбинации с выходов регистров Рг1 … РгN – х1х2…хn, то
схемы сравнения СС должны сравнивать указанные коды поразрядно
(х1 с х1 , х2 с х2 и т. д.).
х1
1
х1
1
х1
&
х1 х1
х1
1
&
х1 х1 + х1 х1
х1 х1
&
хn
1
хп
хn
1
хп
&
хп хп
1
&
0 (1)
хп хп + хn хn
хn хn
Рис. 1.12. Структура схемы сравнения двоичных кодов на совпадение
Как видно из рис.1.12, схема сравнения СС состоит из логических
элементов, обеспечивающих реализацию логических функции, таких
как инверсия, умножение и сложение. Эти функции легко реализуются на основе простых интегральных микросхем. Так, для сравнения
первых разрядов двух входных кодов, используются две схемы, реа21
лизующие функцию логической инверсии. Также используются две
двухвходовые схемы, реализующие функции логического умножения
и одна двухвходовая схема, реализующая функцию логического сложения. Эти схемы обеспечивают формирование сигнала, необходимого для определения равенства первого разряда сравниваемых кодов.
Выходной сигнал последней из указанных схем подается на вход схемы, реализующей функцию логического умножения с общим числом
входов, определяемым разрядностью сравниваемых кодов. На вход
этой схемы подаются сигналы со всех каналов сравнения разрядов
кодов. В результате на выходе этой схемы формируется нулевой сигнал при неравенстве кодов хотя бы по одному разряду и единичный
сигнал при равенстве всех разрядов кодов. Понятно, что с увеличением разрядности сравниваемых кодов сложность схемы сравнения существенно растет.
Итак, в главе кратко приведены теоретические сведения о ЖКИ,
знание которых важно при проектировании современных СОИ. В главе также рассмотрены и вопросы проектирования СОИ на основе
ЖКИ. Существенное место в главе занимают построенные системы
управления многоразрядными ЖКИ, обеспечивающие отображение
информации в статическом и динамическом режимах.
22
2. ВАКУУМНО-ЛЮМИНЕСЦЕНТНЫЕ ИНДИКАТОРЫ
И ПРОЕКТИРОВАНИЕ НА ИХ ОСНОВЕ СИСТЕМ
ОТОБРАЖЕНИЯ ИНФОРМАЦИИ
Вакуумно-люминисцентные индикаторы (ВЛИ) широко используются для отображения цифровой информации благодаря высокой
яркости свечения, малой инерционности и надежности. Важно знать
теоретические основы их практического применения в различных
устройствах, включая и системы отображения информации. В связи с
этим вначале рассмотрим кратко конструкцию, принцип действия,
типы и свойства ВЛИ, а затем вопросы построения систем управления
многоразрядными ВЛИ, которые являются главными звеньями СОИ
на базе ВЛИ.
2.1. ВЛИ: конструкция, разновидности конструктивного
исполнения и принцип действия
ВЛИ состоят из активированного (оксидного) прямонакального
катода (НК), анодов-сегментов (А) и сетки (С). Эти электроды помещаются в стеклянный баллон, из которого откачивается воздух до высокого вакуума. Конструкция ВЛИ схематично приведена на рис.2.1а.
Эмиссия электронов из катода в ВЛИ происходит при температуре
нагрева НК около 700 0С. В обычных радиолампах применяется
меньшая рабочая температура, что обеспечивает им высокую долговечность (свыше 1000 часов) и ослабляет свечение самого катода.
Конструктивно сетка и катод ВЛИ выполняются из очень тонких
проволок с целью исключения влияния на визуальную индикацию
отображаемого знака.
Другой особенностью ВЛИ является покрытие анодов-сегментов
специальным слоем люминофора, который возбуждается за счет действия электронной бомбардировки. Иначе, покрытие начинает светиться тем или иным цветом, позволяя визуально различать отображаемый знак. Ток индикатора, протекающий между катодом и анодамисегментами, пропорционален напряжению в степени 3/2, а мощность,
выделяемая ВЛИ при этом, – в степени 5/2.
ВЛИ, подобно ряду других цифро-буквенных индикаторов, конструктивно исполняется в двух модификациях: в виде одноразрядных
индикаторов, рассчитанных на одно знакоместо, и в виде многоразрядных индикаторов, называемых еще монодисплеями. Они предполагают организацию множества знакомест.
23
Число выводов как одноразрядных, так и многоразрядных ВЛИ,
совпадают из-за того, что в многоразрядных индикаторах одноименные аноды-сегменты разных знакомест объединяются внутри стеклянного баллона, как это показано на рис.2.2. Этим и обеспечивается
снижение числа выводов и подсоединений многоразрядного индикатора к системе управления.
На рисунках приняты следующие
НК
НК
обозначения: А – анод, С – сетка, НК –
накальный катод, П – подложка анодов
a
сегментов, Л – люминофор, а, b, c, d, e,
f, g – аноды-сегменты (А–С) ВЛИ.
В одноразрядных ВЛИ внешние
f
b
выводы из баллона индикатора имеют каждый А-С и С, а также два
внешних вывода имеет катод НК для
A
накала. Остальные особенности одg
норазрядных и многоразрядных ВЛИ
иллюстрированы на рис.2.1 и рис.2.2.
Принцип действия ВЛИ заклюc
e
чается в следующем. Возбуждение
свечения
НК
С
А–С происходит одновременно
подачей на сетку и анод положительных напряжений. При этом электроd
ны, эмитированные из катода, вызывают свечение люминофора (Л). Чаще всего свечение бывает синеНК
НК
зеленым. Если напряжение на сетке
С индикатора С равно нулю, то электроны не достигают анодов сегменA
Л
тов А–С и люминофор соответствующего анода-сегмента не светится.
Для отображения различных знаков
П
на ВЛИ необходимо комбинировать
Рис.2.1. Конструкция
сочетанием включенных анодов-сегсемисегментного ВЛИ
ментов А-С. Таким образом, на основе 7-сегментного индикатора можно отображать конфигурации всех
арабских цифр и ряд букв русского алфавита. Вариант отображения
арабских цифр приведен на рис.2.3.
24
С1
С2
С3
b
a
f
g
e
d
c
Рис. 2.2. Электрическая схема многоразрядного ВЛИ
Рис.2.3. Отображение арабских
ВЛИ цифр ВЛИ
2.2. Проектирование систем управления многоразрядными ВЛИ
Многоразрядные ВЛИ (МВЛИ) могут отображать знаки в двух
режимах: статическом и динамическом, которые предполагают разные
алгоритмы управления МВЛИ, а значит разные варианты построения
систем управления (СУ) многоразрядными индикаторами.
2.2.1. Проектирование систем управления, реализующих
статический режим работы многоразрядных ВЛИ
Статический режим работы МВЛИ используется при небольшом
числе знакомест. Структурная схема СУ для этого случая приведена
на рис.2.4, из которого видно, что схема состоит из двух ВЛИ, двух
блоков анодных ключей (БАК1, БАК2), двух дешифраторов (Дш1, Дш2),
двух двоичных счетчиков (Сч1, Сч2).
25
Рис. 2.4. Структурная схема системы управления МВЛИ в статическом
режиме
Двоичные коды от счетчиков Сч1 и Сч2 разрядностью “с” поступают на входы Дш1 и Дш2 и преобразуются в n-разрядные сегментные
коды. Выходы дешифраторов с помощью анодных ключей БАК1 и
БАК2 согласуются по напряжению и мощности с уровнями сигналов,
необходимых для подачи на аноды-сегменты (А-С) индикаторов. При
открывании ключей обеспечивается высвечивание соответствующих
анодов-сегментов ВЛИ.
Система управления для статического режима отображения информации с помощью МВЛИ использует большое число устройств,
что особенно проявляется при числе ВЛИ больше трех. В таких случаях наиболее целесообразно применение динамического режима работы ВЛИ.
2.2.2. Проектирование систем управления, реализующих
динамические режимы работы многоразрядных ВЛИ
Различают три способа динамической индикации МВЛИ с временной разверткой, а значит три вида СУ для отображения информации, которые условно можно назвать следующим образом:
26
– управление по сеткам;
– управление по анодам-сегментам;
– управление по знакам.
Один из возможных вариантов реализации способа динамической
индикации с управлением по сеткам, а значит вариант построения СУ
для этого случая – изображен на рис.2.5.
Рис.2.5. Структурная схема системы управления в динамическом режиме
работы МВЛИ с сеточной разверткой
Как видно из рисунка, СУ состоит из многоразрядного индикатора (МВЛИ), одного БАК, одного дешифратора Дш, одного блока сеточных ключей (БСК), устройства управления (УУ), мультиплексора
(Мs) и счетчиков Сч1–СчN , выполняющих роль ОЗУ.
БСК обеспечивает последовательную подачу на сетки индикаторов положительного напряжения соответствующей величины Uc. Его
работой управляет устройство управления УУ, подающее на вход БСК
27
N-разрядный унитарный код. Одновременно УУ подает на адресный
вход Мs k-разрядный двоичный код, необходимый для последовательного подключения выходов счетчиков Сч1–СчN к входам дешифратора
Дш. В схеме использованы следующие обозначения: N – число разрядов МВЛИ, k = ]log2N[, c = ]log2M[, где М – длина алфавита отображаемых знаков.
Таким образом, работа СУ заключается в следующем. Последовательно во времени Ms по сигналу от УУ подключает выходы счетчиков ОЗУ к входам дешифратора Дш, который преобразует с-разрядные
коды в n-разрядные сегментные коды ВЛИ. Эти коды после подачи на
входы БАК обеспечивают выбор соответствующих анодов-сегментов
для участия в отображении знака. Одноименные аноды-сегменты А-С
всех разрядов соединены параллельно и находятся в одинаковом положении. В связи с этим участие конкретного знакоместа в отображении знака и определяется единичным сигналом, подаваемым на сетку.
Единичные сигналы подаются на сетки МВЛИ с заданной последовательностью во времени. Совокупность этих сигналов называется сеточной разверткой. Она формируется УУ. Другими словами, при каждом такте времени Мs обеспечивает передачу кода на вход Дш от
счетчика ОЗУ, и информация отображается на ВЛИ соответствующего
счетчику разряда. В итоге в отображении информации принимают
участие все разряды счетчиков и МВЛИ.
Правильное отображение информации обеспечивается тем, что
высвечивание анодов-сегментов (А–С) осуществляется при совпадении возбуждающих сигналов, подаваемых на сетку и А–С. Пример
отображения цифр арабского алфавита 0, 1, 2, …, 9 в рассмотренной
схеме с сеточной разверткой иллюстрируется временными диаграммами, приведенными на рис. 2.6.
Приведенная схема устройства управления МВЛИ позволяет
осуществлять отображение информации путем использования только
одного дешифратора, (N+n) ключей и одного Ms, а также существенно
уменьшить число выводов МВЛИ.
Так как аноды-сегменты каждого знакоместа возбуждаются со
скважностью N, то средняя яркость свечения Вср анодов-сегментов
МВЛИ, определяемая по формуле:
Вср
Вмакс
,
N
будет в N раз меньше максимальной яркости свечения ВЛИ.
28
a
Ua
f
a
Ub
e
Uc
b
Ud
c
Ue
d
Uf
e
Ug
f
b
g
c
d
g
Uc0
Uc1
t
Uc2
t
Uc3
t
Uc4
t
Uc5
t
t
Uc6
t
Uc7
Uc8
t
Uc9
t
t
Рис. 2.6. Временные диаграммы анодно-сегментных и сеточных напряжений
ВЛИ, соответствующих отображаемым арабским цифрам 0, 1, …, 9.
Второй способ управления многоразрядных ВЛИ, работающих в
динамическом режиме, предусматривает подачу напряжений возбуждения на одноименные аноды-сегменты всех разрядов МВЛИ последовательно во времени. Сигналы возбуждения А–С условно называются анодной разверткой. При этом положительные напряжения на
сетки индикаторов должны подаваться в моменты анодной развертки,
которые соответствуют синтезируемым знакам в данном знакоместе.
Средняя яркость свечения анодов-сегментов в рассматриваемом способе, определяемая по формуле:
1
Вср Вмакс
n
29
и она в n раз меньше максимального значения.
Структурная схема СУ, реализующая динамический режим работы МВЛИ с управлением по анодам-сегментам индикатора, приведена
на рис. 2.7.
На рисунке приняты следующие сокращения: БАР – блок анодной
развертки, формирующий n-разрядный унитарный код, иначе анодную развертку; БУС – блок управления сетками, обеспечивающий
сравнение кодов на выходе БАР и счетчиков Сч1–СчN. Очевидно, что
сравнение возможно, если коды счетчиков будут предварительно преобразованы в сегментные коды ВЛИ.
Как видно из рис.2.7, разрядность анодной развертки определяется числом анодов-сегментов, поэтому число тактов работы СУ равно
числу кодовых комбинаций анодной развертки или разрядности кода
на выходе БАР.
НК1
НКN
+Uн
U c1
UcN
n
1 2
+Uс
БСК
N
1 2
n
1 2
N
1
+Ua
БАК
БУС
БАР
1
1
4 1
4
4
1
Сч1
4
СчN
ОЗУ
Рис. 2.7. Структурная схема системы управления в динамическом режиме
работы МВЛИ с анодной разверткой
30
Работа СУ заключается в следующем. В первом такте выходным
сигналом БАР активизируются первые аноды-сегменты всех разрядов
МВЛИ, но сигналы разрешения на свечение сегмента подаются от
БУС только на определенные разряды МВЛИ. Понятно, что в счетчиках Сч1–СчN этих разрядов должны содержаться коды таких знаков, в
отображении которых участвует первый сегмент. Во втором такте активизируются вторые А–С всех разрядов и одновременно выявляются
разряды, которые должны получить сигналы разрешения на свечение
этого сегмента. Таким образом, СУ должна в каждом такте обеспечивать последовательную во времени активизацию сегментов А–С и
проверку их участия в отображении знаков, содержащихся в виде кодов в счетчиках ОЗУ. При обнаружении участия разряды МВЛИ высвечивают элементы анодной развертки, а в конце последнего такта
все разряды высвечивают знаки, коды которых содержатся в ОЗУ.
Функции БУС усложняются тем, что он должен одновременно
преобразовывать двоичные коды от счетчиков Сч1–СчN в сегментные
коды ВЛИ и поразрядно сравнивать эти коды с кодами анодной развертки. При обнаружении совпадения сегментных кодов с анодной
разверткой БУС должен формировать на соответствующих выходах
единичные сигналы, подаваемые на сетки разрядов МВЛИ.
Третий способ индикации знаков основан на том, что чаще всего
знакосинтезирующие индикаторы обеспечивают отображение лишь
ограниченного числа знаков, например, семисегментные индикаторы
отображают цифры от 0 до 9. Поэтому для таких случаев можно использовать развертку по знакам, при которой на параллельно включенные аноды-сегменты всех индикаторов поочередно подаются кодовые комбинации, соответствующие всем отображаемым знакам, но
положительные напряжения на сетки индикаторов (знакоместа) подаются только при совпадении знака развертки с отображаемым знакоместом знака. Иначе, при совпадении знаков развертки с отображаемыми знаками знакомест на соответствующие сетки разрядов должны
подаваться положительные напряжения с целью высвечивания ими
заданного знака.
31
Структурная схема СУ в динамическом режиме работы МВЛИ со
знаковой разверткой приведена на рис.2.8. Как видно из рисунка, блок
знаковой развертки (БЗР) формирует n-разрядные коды для подачи на
аноды-сегменты А–С и k-разрядные коды для подачи на блок БУС,
который обеспечивает проверку соответствия кодов счетчиков всех
разрядов с кодами знаковой развертки. Число тактов работы СУ равно
числу знаков алфавита, поэтому все знаки, коды которых содержатся в
ОЗУ, в этом динамическом способе отображаются в конце последнего
такта.
НК1
НКN
+Uн
Uc1
1 2
UcN
n
БАК
1 2
n
N
1
+Ua
+Uс
БСК
1 2
1
БЗР
N
БУС
k
ОЗУ
Сч1
СчN
Рис. 2.8. Структура системы управления в динамическом режиме работы
МВЛИ со знаковой разверткой
Функции БАР усложнены тем, что он, кроме формирования кодов
знаков в виде n-разрядных сегментных кодов ВЛИ, обеспечивает их
преобразование в k-разрядные двоичные коды, которые в устройстве
БУС сравниваются с кодами от счетчиков Сч1–СчN на каждом такте.
При совпадениях кода БЗР с кодами счетчиков Сч1–СчN на выходах
БУС формируются единичные сигналы, разрешающие соответствующим разрядам МВЛИ отображать знак развертки.
32
Средняя яркость свечения при знаковой развертке в m раз меньше
максимальной, где m – число отображаемых знаков:
Вср
Вмакс
.
m
Для обеспечения одинаковой яркости свечения анодов-сегментов
всех знакомест МВЛИ при любом способе динамического управления
необходимо соблюдать условия равенства скважностей высвечивания
каждого из анодов, участвующих в формировании отображаемого знака.
Из сравнения структурных схем с разными способами динамического управления ВЛИ следует, что, на первый взгляд, наиболее просто реализуется способ управления по сеткам индикаторов, а наиболее
сложно – способ управления по знакам. Однако выбор наиболее оптимального способа управления (вида развертки) в общем случае в значительной мере определяется как числом анодов-сегментов, так и
числом отображаемых знаков.
2.3. Методика проектирования систем управления для СОИ,
реализуемых на основе многоразрядных ВЛИ
Методика предусматривает выполнение ряда формализованных
процедур, облегчающих процесс проектирования СОИ, и одновременно определяет временную последовательность выполнения этих
процедур. Рассмотрим процедуры методики, соблюдая последовательность выполнения процедур, предусмотренных методикой.
1. Определение разрядности и типа МВЛИ. Разрядность и тип
МВЛИ можно связывать с рядом показателей, включая объем отображаемой информации, скорость отображения данных, сложность графики знаков алфавита, стоимость технических средств, необходимых
для построения системы управления, представляющую собой важнейшую составляющую СОИ. Кроме этого – число знакомест (N), типы ВЛИ по числу анодов-сегментов (n) и длину алфавита (m) дополнительно следует согласовать с пользователем СОИ.
2. Выбор режима индикации. Так как режимы индикации бывают
4-х видов, то надо с учетом критерия, предъявляемого пользователем,
выбрать наиболее рациональный режим. К примеру, с точки зрения
33
обеспечения максимальной яркости индикации может быть выбран
статический режим индикации знаков. Напротив, для отображения
информации с минимальными аппаратурными затратами целесообразнее использование динамических режимов, из которых также выбирается один вид режима, к примеру исходя из обеспечения требуемой яркости индикации знаков. Из динамических режимов в зависимости от значений N, n, m выбирается или режим с сеточной развертВ
кой (средняя яркость определяется по формуле: Вср макс ), или реN
жим с анодной разверткой (средняя яркость определяется по формуле:
В
Вср макс ), или режим с знаковой разверткой (средняя яркость опреп
В
деляется по формуле: Вср макс ).
М
3. Расчет параметров узлов системы управления индикацией
МВЛИ. Проводятся расчеты разрядностей всех узлов схемы по входам
и выходам: счетчиков, дешифраторов, блоков развертки и т. д.
4. Разработка структурной схемы, проверка согласованности по
входам и выходам узлов структурной схемы.
Если проверка показала несоответствие каких-либо узлов, то производится перерасчет до достижения полного совпадения разрядности
всех соответствующих входов и выходов узлов схемы.
5. Выбор элементной базы принципиальной схемы, их обоснование, выбор питающих напряжений: напряжения накала катодов – Uн,
сеточного напряжения – Uс, анодного напряжения – Uп.
6. Разработка принципиальной схемы системы управления и расчет параметров резисторов, конденсаторов и других элементов схемы.
7. Расчет параметров надежности Обеспечение требуемой надежности системы управления за счет выбора элементной базы с высокой
надежностью и за счет схемных решений.
Методику в виде алгоритма можно представить рис. 2.9. Алгоритм служит иллюстрацией основных этапов проектирования систем
управления индикацией МВЛИ. Методика может быть использована
при проектировании систем управления для отображения информации
на основе других многоразрядных индикаторов, например на основе
многоразрядных ЖКИ.
34
Начало
Определение разрядности МВЛИ
Выбор режима индикации
да
N 3?
Выбор статического режима
индикации
нет
Выбор динамического режима
индикации
да
N n, M ?
нет
Выбор динамического режима
индикации с сеточной разверткой
да
пМ ?
нет
Выбор динамического режима
индикации с анодной разверткой
a
a
b
c
b
Выбор динамического режима
индикации с знаковой разверткой
d
c
d
Расчет параметров узлов системы управления
индикацией МВЛИ
Разработка структурной схемы
Согласованы ли
входы и выходы?
нет
да
Выбор элементной базы принципиальной схемы и
их обоснование
Разработка принципиальной схемы и расчет
параметров элементов схемы
Конец
Рис. 2.9. Алгоритм проектирования СОИ на основе ВЛИ
35
3. ПРОЕКТИРОВАНИЕ УСТРОЙСТВ РУЧНОГО ВВОДА
ДАННЫХ ДЛЯ СОИ
Ручной ввод информации производится с помощью устройства,
содержащего клавиатуру. Техническая реализация клавиатуры, а значит в целом самого устройства ручного ввода данных (УРВД), зависит
от длины отображаемого алфавита. Следует отметить, что каждой
клавише должен соответствовать только один знак алфавита. Таким
образом, в зависимости от длины алфавита отображаемых знаков в
УРВД применяются два способа адресации клавиш клавиатуры: линейная (однокоординатная) и матричная (двухкоординатная). Эти
способы отличаются друг от друга существенным образом, поэтому
вопросы их реализации в работе рассматриваются по отдельности.
3.1. Проектирование УРВД с линейной адресацией клавиш
При линейной адресации к каждой клавише подсоединяется вывод мультиплексора (MS), как это показано на рис. 3.1. Число информационных входов MS определяется числом знаков отображаемого
алфавита, а значит числом функциональных клавиш, соответствующих функции редактирования [1]. Путем сканирования входов MS,
осуществляемого счетчиком (Сч), выявляется номер нажатой клавиши: при совпадении числа в Сч с номером нажатой клавиши на выходе MS появляется сигнал логической «1», который проходит через
схему подавления дребезга (СПД), предназначенной для устранения
многократных срабатываний, возникающих при вибрации механических контактов клавиш. СПД построена на триггере (Т) типа «защелка». При появлении «1» на выходе Т запирается вентиль & с инверсией по одному входу, запрещающий поступление импульсов на вход
Сч. Через определенную задержку, необходимую для установления
информации на выходе Сч, код номера нажатой клавиши преобразуется в код, в котором реализуется обмен информацией в СОИ. Как
видно из рис.3.1, этот код выдается из ячейки памяти ПЗУ, в котором
предварительно записываются коды знаков всего алфавита. Недостаток схемы линейной адресации – большое количество входов MS,
усложняющее его техническую реализацию. Для «длинных» алфавитов используется схема двухкоординатной адресации.
36
Е
R1 к
1
1
Е
MS
к2
R2
2
D
C
R
кN
T
1
N
1
2
А1
А2
m
Аm
ВС
ТГ
Сч
1
2
1
2
А1
А2
m
m
Аm
&
ПЗУ
Код знака
Рис. 3.1. Структурная схема устройства ручного ввода данных
с линейной адресацией клавиш
3.2. Проектирование УРВД с двухкоординатной адресацией
клавиш
При двухкоординатной адресации каждая клавиша ставится на
пересечении матрицы проводников, состоящей из m столбцов и п
строк, причем: (m n) = N. При квадратной матрице расположения
клавиш: т = п= N .
Общее число коммутируемых выходов матрицы равно (т + п),
что намного меньше, чем при линейной адресации. Пример построения схемы при двухкоординатной адресации показан на рис. 3.2.
Младшие разряды Сч (1÷g) адресуют m вертикальных шин матрицы
через МS, а старшие разряды – (g+1)÷(g+d) через дешифратор (DC)
адресуют п горизонтальных шин матрицы.
37
S1
Сч q+d
ТГ
&
q+d q+d
DC
C
q+1
q
1
1
2
q+1
q
1
Snm
n
q+1
1
q+d
2
m
ПЗУ
Код знака
2
1
1
BC
m
q
1
1
Аq
MS
СПД
d1
Рис. 3.2. Структурная схема устройства ручного ввода данных
с двухкоординатной адресацией клавиш
При совпадении адреса столбца и строки логическая единица «1»
через СПД запирает вход счетчика. Затем через определенную задержку по сигналу на входе выбора кристалла (ВС) ПЗУ код Сч преобразуется в код знака.
Схемы УРВД могут быть построены на основе микропроцессорных средств (МПС). Для случая построения УРВД с двухкоординатным
расположением клавиш важно отметить, что при вводе информации с
клавиатуры в МПС сканирование клавиш осуществляется программным путем. Код адреса на вход МS и DC поступает через порт компьютера. Алгоритм ввода знаков с клавиатуры представлен на рис. 3.3.
При совпадении кода адреса с кодом нажатой клавиши на выходе
МS появляется сигнал, используемый как сигнал запроса прерывания.
38
1
Нет
Да
2
11
3
10
Нет
4
Да
5
Нет
6
Да
7
8
9
1. Начало
2. N0 A
3. (A) ПК
4. N0 = N
5. П/п IDENT
6. Клав. функц.
7. П/п FUNKT
8. (A) - БЗУ
9. Увеличить адрес
маркера на 1
10. (А) = (А)+1
11. (А) = N0+Nкл
12. Конец
12
Рис. 3.3. Блок-схема алгоритма ввода данных
с клавиатуры
Подпрограмма ввода данных начинается с выдачи из аккумулятора предварительно загруженного кода первой клавиши. Затем идет
процесс сравнения номера нажатой клавиши с содержимым аккумулятора, число в котором после каждого сравнения увеличивается. При
совпадении числа в аккумуляторе с номером клавиш происходит переход к подпрограмме идентификации функций клавиш (IDENT).
Цикл сканирования повторяется после достижения числа в аккумуляторе значения N0+N, где N – число клавиш. Подпрограмма IDENT
опознает функцию нажатой клавиши. Если клавиша функциональная,
то она передает управление соответствующей подпрограмме FUNCT,
обеспечивающей реализацию этой или иной функции дисплея. При
нажатой знаковой клавише работает подпрограмма ввода данных,
обеспечивающая перенос содержимого аккумулятора в соответствующую ячейку БЗУ, адресуемую маркером.
39
4. ПРОЕКТИРОВАНИЕ МИКРОПРОЦЕССОРНЫХ СИСТЕМ
УПРАВЛЕНИЯ ИНДИКАТОРАМИ ДЛЯ СОИ
4.1. Развитие возможностей СОИ на основе микропроцессоров
Более десятка лет назад средства микропроцессорной техники
начали широко применять во многих вновь разрабатываемых технических системах и устройствах и тем самым определять уровень технического прогресса. При этом одной из наиболее эффективных областей использования микропроцессоров (МП) являются интеллектуальные терминалы, обеспечивающие создание СОИ нового поколения.
Благодаря гибкости МП и широким возможностям программного задания режимов работы терминала, можно создавать контроллеры, выполняющие широкий набор функций СОИ. Прежде всего, таких как:
ввод – вывод данных через дисплей, редактирование текста, изменение формата выводимой на экран информации.
Для обеспечения СОИ столь важных свойств используемые в них
контроллеры должны иметь следующие характеристики: малое время
реакции, способность стыковаться с персональным компьютером
(ПК), возможность получения конфигурации, отвечающей требованиям разных пользователей.
Состав аппаратной части контроллера (К) видеотерминала прежде
всего зависит от технической реализации средства отображения: дисплеи на дискретных индикаторах, дисплеи на ЭЛТ с функциональными способами знакогенерирования, растровые дисплеи, матричные
индикаторы. Состав же программной части зависит от тех управляющих функций, которые выполняет контроллер видеотерминала. Типовая структура микропроцессорной системы (МПС), предназначенной
для работы с дисплеем, показана на рис.4.1.
Устройством ввода информации является клавиатура (К), которая
содержит набор алфавитных и функциональных клавиш, обеспечивающих режим диалога. Клавиатура сопряжена с МПС через порт клавиатуры ПК. Индикатор (И) управляется через согласующее устройство (СУ) от знакогенератора (ЗГ), в котором записывается графика
выводимых на экран символов. Выборка соответствующих элементов
из ЗГ осуществляется набором внешних регистров, объединенных на
схеме в блок дисплейного контроллера (ДК).
Регенерация изображения осуществляется ДК, который с помощью контроллера прямого доступа к памяти (КПДП) организует выборку кодов знаков из БЗУ. В БЗУ хранятся коды знаков отображаемой на экране дисплея информации.
40
41
ШУ
ША
ШД
МП
ЗПР
ГД
ДК
ПЗУ
ЗГ
БЗУ
СУ
ПК
И
К
Рис. 4.1 Структура микропроцессорной системы управления индикатором
КПДП РПР
ТГ Ф 2
Ф1
ИИ
МS
Синхронизация работы МПС отображения информации в режиме
регенерации изображения осуществляется генератором дисплея (ГД).
В качестве источника информации может быть не только клавиатура,
но и ЭВМ, а также любые средства сбора информации, подключаемые
к МПС через MS. Поскольку архитектура и программное обеспечение
МПС во многом определяются типом индикаторного устройства, то
принципы проектирования и вопросы реализации МПС управления
видеотерминалом целесообразнее всего рассмотреть на основе конкретного примера.
4.2. Проектирование микропроцессорных систем управления
дискретными индикаторами
Управление дискретными индикаторами предполагает реализацию функций дешифрации и адресации [1]. При этом, как известно,
функция дешифрации предполагает преобразование кода знака, поступающего от источника информации, в код, формирующий графику
знака на том или ином типе индикатора. Эта функция привязана к исторически сложившейся конфигурации знаков отображаемого алфавита, легко реализуется с помощью ПЗУ и, как правило, не требует
возможности смены алфавита. Следовательно, для ее реализации в
системах управления ДИУ не требуется МП. Использование МП для
реализации функции адресации элементов в поле изображения позволяет строить гибкую перестраиваемую систему широкого применения.
В свою очередь, поскольку адресация – это сугубо логическая функция, то для облегчения ее программной реализации можно использовать некоторые формальные процедуры синтеза логических
устройств. К таким процедурам относятся, прежде всего, формальные
методики получения минимизированных таблиц переходов (или графсхем) проектируемой системы адресации.
Переход от минимизированной граф-схемы к блок-схеме алгоритма является ключевым элементом процедуры, позволяющим отобразить таблицы переходов автомата на множестве команд данного типа МП. Алгоритм синтеза МПС, основанный на таком подходе, представлен на рис.4.2.
Ответственным этапом является отображение граф-схемы переходов блок-схемой алгоритма.
42
Описание системы
Граф-схема автомата
Таблица переходов
Минимизация числа
состояний
МП
МП или логика?
Логика
Отображение графа –
блок-схема алгоритма
Выбор типа триггеров
Трансляция на язык
мнемо кодов
Кодирование состояний
Трансл. на машинные
коды и загрузка в ПЗУ
Синтез схемы
возбужденных триггеров
Отладка и реализация
схемы
Отладка и реализация
схемы
Рис. 4.2. Алгоритм синтеза МПС управления
Рассмотрим фрагмент графа автомата, приведенного на рис.4.3,
и в котором X и Z – двоичные векторы, принадлежащие множествам
наборов входных {X} и выходных {Z} сигналов, Q – множество состояний автомата. Причем,
Переход к блок-схеме алгоритма предполагает замену вершин
графа и дуг соответствующими эквивалентами блок-схемы:
43
– операторные прямоугольники ставятся в соответствие вершинам – устойчивым состояниям автомата, то есть фрагмент программы, определяемый этим блоком, должен быть неветвящимся, и
каждая команда адресуется монотонно нарастающим числом в счетчике команд;
– условные операторы, проверяющие условия изменения входного вектора X, обеспечивают селекцию изменения X и переход в новое
состояние в соответствии со значениями Xj и Q.
Построенный таким образом эквивалент графа представлен на
рис.4.4.
Qi, X i, Zi
Qi
X i Zi
X X i 1
X i 1 Z i 1
Нет
Да
Q i 1
X i 1 Z i 1
Q i 1 , X i 1 , Z i 1
X i 2 Z i 2
Нет
X X i 2
Рис. 4.3. Фрагмент графа
автомата
Рис. 4.4. Эквивалент графа автомата
4.3. Пример проектирования микропроцессорной системы
управления дискретным индикатором (на примере светофора)
Рассмотрим задачу проектирования МПС для случая управления
светофором (С), выбранного в качестве дискретного индикатора и
установленного на перекрестке главной улицы с переулком. При этом
МПС построим в виде контроллера (К). Для фиксации наличия транспорта на пересечении переулка с улицей имеются датчики D1, D2. Для
пешеходов предусмотрены 4 кнопки: К1–К4 (рис.4.5). К должен давать зеленый цвет по переулку только по сигналам D1, D2 или в случае запросов от пешеходов, вводимых с помощью К1–К4. Примем
также, что пересечение главной улицы разрешается в течение 60 с,
44
свечение желтого цвета – 10 с, движение по основной транспортной
магистрали – все остальное время.
К1
Д1
К2
Светофор
Улица
К3
Д2
К4
Переулок
Рис. 4.5. Схема перекрестка со светофором и датчиками
движения транспорта
В табл.4.1 закодированы состояния индикаторов, входящих в состав С.
Цвет
Зеленый
Желтый
Красный
Таблица 4.1
Переулок
ЗП
ЖП
КП
Улица
3У
ЖУ
КУ
С учетом обозначений индикаторов С, его выходные состояния Zi,
закодированные в двоичной форме, сведены в табл.4.2, в которой «0»
обозначает отключение соответствующего индикатора, а «1» – его
включение.
При реализации К важно разделение функций между аппаратным
(АО) и программным (ПО) обеспечениями. Пусть формирование временных выдержек, в нашем примере 60 с и 10 с, выполняет АО, а задачу изменения состояний светофора – ПО.
Таблица 4.2
Состояние
светофора
Z1
Z2
Z3
Z4
3У
ЖУ
КУ
3П
ЖП
KП
1
0
0
0
0
1
0
0
0
0
1
1
0
0
1
0
0
0
0
1
1
1
0
0
45
Разработанная схема К показана на рис.4.6, где приняты обозначения: х1, х2, х3 – входные сигналы МП, формирующиеся, как при
нажатии кнопок, так и при срабатывании датчиков и при появлении
сигналов желтого цвета по любому из направлений движения.
К1
К2
К3
К4
1
Д1
Д2
1
ОВ
x2
x3
ОВ
1
ЗУ
ЖУ
КУ
ЗП
ЖП
КП
x1
МП
Память
Рис.4.6.Структурная схема контроллера, управляющего светофором
По алгоритму функционирования С и таблице его состояний
строим граф-схему переходов автомата, показанного на рис.4.7.
100 , 010 ,110 /Z 2
000 /Z 1
001 ,101 , 011 ,111 /Z 2
100 ,
110
010 ,
2
001 ,1
01 , 0
11 ,11
1
000 /Z 1
1
3
100 , 010 ,110
000
100 , 010 ,110
6
001 ,101 , 011 ,111 /Z 4
4
100 , 010 ,110 /Z 3
001 ,1
01 , 0
11 ,11
1
000
5
000 /Z 4
Рис. 4.7. Граф-схема автомата-контроллера
На граф-схеме двоичными кодами представлены входные сигналы контроллера: 1-я позиция кода соответствует состоянию х1; 2-я позиция – состоянию х2; 3-я позиция – состоянию х3.
46
Граф-схеме автомата соответствует таблица переходов, которые
приведены в табл.4.3.
Таблица 4.3
1
000
1, Z1
01Я
2,Z2
Входная переменная
IIP
100
101
111
2,Z2
2,Z2
__
__
2
3
4
5
6
–
–
5,Z4
5, Z4
1,Z1
2,Z2
4,Z3
4,Z3
–
4,Z3
2,Z2
4,Z3
4,Z3
–
4,Z3
Состояние
2,Z2
4,Z3
4,Z3
–
4,Z3
3,Z2
3,Z2
–
6,Z4
6,Z4
3,Z2
3,Z2
–
6,Z4
6,Z4
011
__
001
__
3,Z2
3,Z2
–
6,Z4
6,Z4
3,Z2
3,Z2
–
6,Z4
6,Z4
Переходы, обозначенные в таблице прочерком, означают неопределенное состояние автомата. Если доопределить строки таблицы соответствующими наборами, то появляется возможность минимизации
числа состояний автомата путем склеивания строк 1 и 2, а также 4 и 5
первоначальной таблицы переходов. Минимизированная таблица переходов сведена в табл.4.4.
Состояние
1+2 Q,
3 Q2
4+5 Q3
6 Q4
Таблица 4.4
Входная переменная
000(0) 010(2) 110(6) 100(4) 101(5) 111(7) 011(3) 001(1)
1,Z1,
2,Z2
2,Z2
2,Z2
3,Z2
3,Z2
3,Z2
3,Z2
–
4,Z3
4,Z3
4,Z3
3,Z2
3,Z2
3,Z2
3,Z2
5,Z4
4,Z3
4,Z3
4,Z3
6,Z4
6,Z4
6,Z4
6,Z4
1,Z1,
4,Z3
4,Z3
4,Z3
6,Z4
6,Z4
6,Z4
6,Z4
В соответствии с этой таблицей строится минимизированный
граф переходов, как это показано на рис.4.8. Для простоты здесь и далее используются восьмеричные числа для обозначения входных векторов.
В соответствии с описанным в разделе 4.1 переходом от графсхемы автомата к блок-схеме алгоритма строится алгоритм функционирования контроллера С, представленный на рис. 4.9. Алгоритм действует таким образом, чтобы МПС непрерывно тестировала входные
воздействия и принимала решения о формировании выходного сигнала и переходе в другое состояние. Перевод блок-схемы алгоритма в
последовательность машинных команд осуществляется через программу, написанную на языке высокого уровня, либо с помощью мнемонического кодирования.
47
2 , 4 ,6 Z 2
1, 3, 5, 7
Q1
0 Z1
1,3 ,5 , 7 Z 2
Q2
2, 4, 6
0
2, 4, 6
1, 3, 5, 7
Q4
Q3
2 , 4 ,6 Z 3
0 Z4
1,3 ,5 , 7 Z 4
Рис. 4.8. Минимизированный граф переходов
Память МПС условно разбивается на зону команд, адресуемую
счетчиком команд, зону данных, адресуемую указателем данных. В
предлагаемой системе указателем данных служит регистровая пара
HL. Регистры В, С, D, Е могут использоваться как рабочие с целью
преобразования данных и обмена. Структура данных должна быть
упорядочена таким образом, чтобы их просмотр в требуемой алгоритмом последовательности мог осуществляться простейшей командой
инкрементирования указателя данных. Программа приведена в
табл. 4.5.
Метка
1
Q1A:
LO:
LI:
Мнемокод
2
Таблица 4.5.
Комментарий
Операнд
ORG
MVI
3
ООООH
А,Z1
OUT
LXI
MVI
MVI
IN
CMP
JZ
INX
DCR
JNZ
01H
H,0095H
С03H
E,04H
01H
M
Q1B
H
С
L1
4
директива Ассемблера
включить зеленый сигнал для главной дороги
загрузка указателя данных счетчик
проверки условий 2,4,6 счетчик
проверки условий 1,3,5,7 ввод
сравнение с уставкой
переход по нулю
инкремент указателя данных декремент счетчика проверок
если не нуль, то сравнивать с следующей уставкой в цикле
48
1
L2:
2
Продолжение табл. 4.5
4
сравнение в новом цикле
3
CMP
JZ
INX
DCR
JNZ
JMP
MVI
M
Q2
H
Ё
L2
Q1A
A,Z2
OUT
LXI
IN
CMP
JZ
JMP
01H
H,0094H
01H
M
Q1A
LO
MVI
A,Z2
OUT
01H
LXI
MVI
IN
H,0098H
С,03H
01H
загрузка указателя данных
CMP
JZ
INX
DCR
JNZ
M
Q,3A
H
С
SPQ >
сравнение
Q3A:
MVI
A,Z3
включить красный свет для главной
дороги
L5:
LXI
MVI
MVI
IN
H,0094H
С,04H
E,04H
01H
CMP
JZ
INX
DCR
JZ
CMP
JZ
IMP
М
Q3B
H
С
L8
М
L5
L7
Q1B:
Q2:
L3:
L4:
L6:
L7:
инкремент указателя данных
проверка условия выхода из цикла
включить желтый сигнал для главной дороги
загрузка указателя данных
ввод
сравнение
включить желтый сигнал для
главной дороги
ввод
инкремент указателя данных
ФМР L3
ввод
сравнение
инкремент указателя данных
49
1
L8:
Q3B:
Q4:
L9:
2
CMP
JZ
INX
DCR
JZ
IMP
MVI
М
Q4
H
Е
L5
L8
A,Z4
OUT
JMP
MVI
OUT
LXI
MVI
IN
CMP
O1H
L5
A,Z4
01Я
H,0094H
C,09H
01H
M
IZ
H
C
L9
M
Q3A
IMP
2, 4, 6
1, 3, 5, 7
41Q
21Q
14Q
12Q
L10:
I NX
DCR
JZ
CMP
JZ
Ml:
M2:
Z1:
Z2:
Z3:
Z4:
DB
DB
EQU
EQU
EQU
EQU
END
Окончание табл. 4.5
4
3
включить красный сигнал для главной дороги
Q1A
L10
50
5. МАТРИЧНЫЕ ИНДИКАТОРЫ И ПРОЕКТИРОВАНИЕ
НА ИХ ОСНОВЕ СИСТЕМ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ
Попытки разработать индикаторные устройства, способные
отображать большие объемы информации, привели к созданию плоских дисплеев в виде матричных индикаторов хорошо согласованных
с низковольтными интегральными схемами систем управления.
Прежде всего, в работе к ним относятся такие матричные индикаторы, как газоразрядные индикаторные панели (ГИП) и светодиодные экраны. На основе этих индикаторных устройств возможно создание высокоэффективных многофункциональных СОИ как индивидуального, так и коллективного пользования. Однако следует отметить, что из всех разновидностей индикаторов всем требованиям,
предъявляемым к плоскому дисплею, отвечают только светодиодные
экраны (СДЭ). Этими требованиями являются: контраст – не хуже
20:1, разрешение – не хуже 5 линий на 1 мм, большой угол обзора, хорошая цветопередача, многоуровневое отображение шкалы яркостей,
большое быстродействие, широкий выбор размеров экрана и т. д.
В табл. 5.1 представлены как основные виды индикаторных
устройств, на основании которых возможно создание плоских индикаторов, так и их качественные характеристики в пятибалльной системе:
отлично (отл.), хорошо (хор.), удовлетворительно (уд.), плохо (пл.).
твист-эффект
СДЭ
хор. отл. хор.
отл. отл. отл.
Угол обзора
Толщина
Стоимость
Быстродействие
Плоские ЭЛТ
отл. отл. пл.
ГИП:
отл. хор. отл.
постоянного тока
переменного тока отл. хор. отл.
ВЛИ
хор. отл. уд.
ЖКИ:
уд. отл. хор.
динамическое
рассеивание
Цвето
передача
Вид
индикатора
Информац.
емкость
Разреш. способность
Площадь
экрана
Таблица 5.1
отл.
отл.
отл. хор. хор. пл. уд. хор.
отл. уд. уд. уд. отл. отл.
отл.
пл.
хор.
отл. уд. уд. уд. отл. отл.
отл. уд. уд. уд. отл. отл.
уд. хор. отл. отл. отл. хор.
уд.
отл.
51
пл. хор. отл. отл. отл. пл.
отл. хор. отл. отл. хор. отл.
P
U
Таблица показывает основные характеристики, отличия разных
индикаторных устройств, включая ЭЛТ, ГИП, СДЭ, ЖКИ и ВЛИ.
Таблица также показывает их важнейшие достоинства. К примеру, из
табл. 5.1 видно, что наиболее универсальными возможностями и характеристиками обладают СДЭ, на основании которых возможно создание СОИ с практически идеальными плоскими экранами. Отметим
здесь, что выше уже были рассмотрены вопросы проектирования СОИ
соответственно на базе ЖКИ и ВЛИ, а далее будут рассмотрены вопросы проектирования СОИ на базе ГИП и СДЭ.
5.1. Газоразрядные индикаторные панели
ГИП удобны для создания плоских дисплеев, так как им свойственны сравнительно высокая информационная емкость, стабильность работы и т. д.
В основе ГИП заложена матрица, в точках пересечения шин которой формируется диодный промежуток. Схема замещения и вольтамперная характеристика (ВАХ) диодного промежутка (ячейки ГИП)
представлены на рис. 5.1.
Ea
U
Ra
Ea
α tgα = Ra
Uз
Uп
Ia
Ia
Рис. 5.1. Схема замещения и ВАХ ячейки ГИП
Для возникновения разряда необходимо, чтобы напряжение питания Ea превысило напряжение зажигания Uз газоразрядного промежутка: Ea ≥ Uз .
Рабочий ток, протекающий через прибор, определяют из выражения:
Ia = (Ea – Uп) / Ra,
где Un – напряжение поддержания разряда.
52
Таким образом, для расчета статического режима работы ячейки
ГИП необходимо определить Uз, Un, Ia.
Кроме статических характеристик для управления ГИП важно
знать и ее динамические характеристики, так как формирование изображения на экране ГИП возможно, как это будет показано ниже, только при импульсном управлении ячейками. Основные динамические
параметры ячеек ГИП иллюстрируются диаграммами (рис. 5.2), показывающими процесс возникновения и гашения газового разряда в
ячейке под воздействием импульса напряжения:
τст – время запаздывания разряда, связанное со временем появления у холодного катода электронов;
τф – время фронта, определяемое лавинообразным процессом
размножения заряда в газоразрядном промежутке;
τя – время деионизации газа в ячейке после снятия напряжения.
U
t
Ia
tи
t
τст
τф
τя
Рис. 5.2. Диаграммы импульсов: напряжения управления и тока в ячейке
Очевидно, минимальная длительность импульса выбора ячейки
ГИП должна быть не менее суммы этих параметров:
tи min ≥ τст+ τф + τя .
В качестве газового наполнения в ГИП применяют неон и его
смеси с другими инертными газами, который дает яркость свечения до
10000 кд/м2 в оранжево-красной и зеленой части спектра.
По принципу действия, конструкции и особенностям управления
ГИП делятся на 3 группы:
− ГИП постоянного тока с внешней адресацией;
− ГИП с самосканированием;
− ГИП переменного тока.
53
5.1.1. ГИП постоянного тока с внешней адресацией (ГИПП)
Конструкция ГИП постоянного тока с внешней адресацией представлена на рис. 5.3. Панель содержит катодную 1 и анодную 2 системы параллельных электродов, которые скрещиваются под прямыми
углами. Между системами электродов расположена диэлектрическая
решетка 3 с отверстиями 4 в местах пересечения электродов. Обкладочные пластины 5 определяют объем панели. Панель загерметизирована по периметру и наполнена инертным газом.
Схема электрического включения ГИП постоянного тока
(ГИПП) показана на рис. 5.4. При
такой схеме включения одновременное возбуждение ячеек, расположенных в столбце матрицы, подключенного
к общему резистору,
Рис. 5.3. Элементы конструкции
невозможно,
так
как при возникноГИПП
вении разряда в одной из ячеек
напряжение на вертикальной шине, являющейся общим электродом,
падает до напряжения Uп, и другие ячейки по этой вертикальной шине
уже не могут включаться.
Ячейки, расположенные на строке, подключены к разным резисторам и могут включаться одновременно. Эта особенность накладывает на схемы управления ГИПП ограничения: может реализовываться динамическая индикация с построчным выводом изображения на
экран. При снятии импульса управления с ячейки разряд прекращается, так как ГИП постоянного тока не обладает внутренней памятью.
Регенерация изображения с частотой выше критической частоты
мельканий fкчм приводит к зависимости средней яркости свечения Вср
от числа опрашиваемых ячеек ГИПП и она определяется по формуле:
Bm
,
g
где Вm – яркость ячейки в статическом режиме;
g – число последовательно возбуждаемых ячеек.
Время выборки одного элемента ГИПП определятся по формуле:
Bср
tВ
54
1
f кчм g
.
U ст1
U ст2 .......
Uстn
Ra
Ra
Ra
EСМ
Uс1
.......
.......
Uсm
Рис. 5.4. Схема электрического включения ГИПП
Выбор источников управляющих напряжений производится из
условий зажигания и поддержания газового разряда:
– ячейка зажигается, если выполняется условие:
Есм + Uстi + Ucj ≥ Uз,
где Uстi – напряжение, подаваемое на вертикальную шину (i = 1…n );
Ucj – напряжение, прикладываемое к горизонтальной шине ( j = 1…m).
При подаче управляющего импульса только на строку или только
на столбец разряд в ячейке должен гаснуть, т. е:
55
Есм + Uстi < Uп,
Есм + Ucj < Uп,
При Uстi = Ucj = Uи эти неравенства имеют вид:
Есм + 2Uи ≥ Uз,
Есм + Uи < Uп.
Конструктивные и электрооптические характеристики типичных
газоразрядных панелей представлены в табл. 5.2.
Недостаток ГИП постоянного тока с внешней адресацией – снижение средней яркости с ростом информационной емкости.
В связи с этим ГИПП используется чаще всего в качестве элементов экранов коллективного пользования при многоматричной адресации и при построчном выводе информации на экран.
Цвет свечения
Макс. угол
обзора
ИГПП
100/100
PUG-256-64R-D1 (Окауа,
Япония)
ГИП коллективного
пользования:
Площадь
индикатора,
мм×мм
1
2
ГИП индивид.
пользования:
ГИП 10000 100×100
Диаметр ячейки,
мм
Тип
индикатора
Информ. ёмкость
(число ячеек)
Таблица 5.2
3
4
5
6
7
8
0,6
100×100
оранж.красный
90°
235
0,9
оранж.
крас50,8×204,4
ный,
зелёный
90°
–0,3
115°
0,2–
0,5
100×100
Uзаж I, мА
100×100
0,6
64×256
0,4
ИГПП 16/32
16×32
3
87×193
зелёный
120° 400
ИГПП 32/32
32×32
3
193×193
зелёный
120°
56
5.1.2. ГИП с самосканированием (ГИПС)
Другими недостатками ГИПП являются: сложность управления, а
также отсутствие равномерной по индикаторному полю предварительной ионизации газа. Эти недостатки отсутствуют в ГИП с самосканированием.
Конструкция ГИПС показана на рис. 5.5. Сканирующая часть содержит аноды сканирования, изготавливаемые из тонкой проволоки,
катодную систему электродов, общую для всех анодов сканирования.
Катодная система изготавливается из тонких металлических полосок,
расположенных перпендикулярно анодам сканирования, объединенных в катодные группы с помощью разводящих шин и одного нулевого катода. В точках скрещения анодов индикации и катодов имеются
отверстия. Таким образом, сканирующая часть ГИПС представляет собой совокупность декатронов с линейным расположением электродов.
.
Рис. 5.5. Элементы конструкции ГИПС
Для подключения ГИПС к электрической схеме от сканирующей
части отводятся три вывода групп катодов К1 –К4, один вывод от К0 и
один вывод от анодов сканирования, объединенных через резисторы.
Индикаторная часть ГИПС содержит аноды индикации, также изготовленные из тонкой проволоки, и диэлектрическую пластину с отверстиями. Аноды индикации проходят вдоль оси расположения отверстий в катодах и диэлектрической пластине.
57
Принцип работы панели для простоты покажем на примере
функционирования одной строки, представленной на рис. 5.6.
АИ
Raи
К0
К1
К2
К3
Еaи
V5
К4
АС
RK
С
V1
Raс
Еaс
V2
V3
V4
EK
Рис. 5.6. Схема электрического включения ГИПС
Анод сканирования (АС) через Rас подключен к источнику Еас,
напряжение которого превышает U3 для ячеек сканирования. Катоды
ГИПС подключены к коллекторам транзисторов VI–V4, напряжение
питания которых Ек. Резистор в коллекторной цепи должен обеспечивать допустимый ток транзистора и необходимый ток подготовительного разряда. Анод индикации (АИ) подключается к коллектору V5,
смещенному с помощью стабилитрона (С), либо дополнительного ис58
точника напряжения. Резистор в коллекторной цепи Rаи выбирается
исходя из режима работы индикаторной ячейки.
При открытом ключе V1 и закрытых V2–V4 на К0 зажигается разряд. Зажигания разряда между анодом сканирования и другими катодами не произойдет, поскольку разность потенциалов между ними на
Ек меньше. Кроме того, для уменьшения Uз нулевой катод выполнен
со специальным штырем, уменьшающим расстояние между анодом
сканирования и К0 . После зажигания разряда через нулевую ячейку
протекает ток, создающий область ионизации вблизи ячейки сканирования, подключенной к первому катоду К1.
По окончании импульса сброса приходит первый импульс, открывающий транзистор V2. Транзистор V1 закрывается и разряд на К0
гаснет. Разность потенциалов между катодами первой группы (К1, K4,
К7 и т. д.) и анодом сканирования АС достаточна для зажигания разряда. Однако, поскольку вблизи К1 область повышенной ионизации,
подготовленная разрядом на К0, то произойдет разряд на К1, напряжение упадет до Uп и другие ячейки этой катодной группы не возбуждаются.
С приходом второго импульса VT3 открывается, a VT2 запирается.
Разряд переходит на К2, расположенный вблизи К1 и, наконец, с приходом импульса на V4, разряд переходит на К3. В дальнейшем цикл
подачи импульсов на V2 – V4 повторяется, но вспомогательный разряд
будет перемешаться по ячейкам К4 – К6 и т. д.
Таким образом, при соединении большого числа катодов в группы и подаче на соответствующие шины тактирующих импульсов,
следующих друг за другом, происходит направленное перемещение
вспомогательного разряда вдоль строки, что напоминает развертку по
одной строке в ТВ-индикаторе.
Поскольку отверстия в катодах малы, свечение сканирующего
разряда не видно на лицевой панели индикатора. Для формирования
изображения синхронно с разверткой сканирующего разряда подаются импульсы на аноды индикации. В схеме на рис.5.6 запирается V5 и
на анод индикации подается напряжение, достаточное для пробоя основного газоразрядного промежутка между анодом индикации и катодом. Поскольку соответствующая ячейка строки подготовлена к зажиганию наличием вспомогательного разряда, то разряд как бы вытягивается на переднюю панель индикаторного устройства через отверстие в катоде и диэлектрической пластине. Для устойчивой работы
импульс индикации должен иметь амплитуду, обеспечивающую зажигание в ячейке, подготовленной вспомогательным разрядом, и не за59
жигаться в других ячейках строки:
Uв > U3 (подготовленной ячейки);
Uв < U3 (неподготовленной ячейки).
Вывод информации на панель ГИПС, как следует из принципа его
работы, производится по столбцам. Для получения немигающего
изображения необходима регенерация с частотой выше fкчм. Следовательно, Вcр и tв будут зависеть от числа столбцов панели, т. е.:
Вср
Вм
,
N ст
tв
1
f кчм Nст
и информационная емкость ГИПС ограничена допустимыми параметрами Вср и tв, обеспечивающими, соответственно, необходимый
контраст изображения и устойчивое зажигание ячеек. Основные параметры ГИПС отечественного производства и производства фирмы
BURROUGHS (США) представлены в табл.5.3 [1,2].
Таблица 5.3
Размер
Тип
Число
Яркость, Угол Uскан, Uиндик,
ячейки,
индикатора ячеек
кд/м2 обзора
В
В
мм
ГИПС
111×7
1
140
90о
250
150
16×1
(16×1)
ИГИПС1
222×7
0,6
140
90о
250
150
222×7
(32×1)
S110120–
280×7
0039
0,9
до 200
150о
250
150
(40×1)
(США)
I,
Контраст
мА
1,4
50
2
50
3
30
Главным образом ГИПС используются для воспроизведения буквенно-цифровой информации в виде одной или нескольких текстовых
строк.
5.1.3. ГИП переменного тока
Отличительными признаками панелей переменного тока являются:
− наличие систем электродов, изолированных от плазмы разряда
слоем диэлектрика;
60
− наличие режима внутренней памяти;
− использование импульсного переменного напряжения поддержания разряда средней или высокой частоты.
Режим памяти является важнейшей особенностью ГИП переменного тока, поскольку в этом режиме отсутствует зависимость
средней яркости свечения от информационной емкости панели. Кроме
того, если скорость поступления информации меньше скорости записи ее на панели, схема управления не требует буферной памяти.
Конструктивно панели переменного тока можно разделить на две
группы:
– с механически изолированными электродами;
– с механически неизолированными электродами.
Базовая конструкция ГИП переменного тока с механическим
разделением системы электродов представлена на рис. 5.7.
Рис. 5.7. Элементы конструкции ГИП переменного тока
Панель содержит стеклянные пластины (1,6), на внутреннюю поверхность которых нанесены системы перпендикулярно расположенных металлических электродов (5), изолированных диэлектриком (7)
со стабилизирующим покрытием (4). Для ограничения области разряда и механического разделения электродов между ними помещена диэлектрическая матрица (2) с отверстиями (3). Диэлектрическое покрытие электродов создает в каждой ячейке ГИП структуру, подобную
емкости, и через ячейку может протекать только переменный ток.
Стабилизирующее покрытие предназначено для снижения напряжения возникновения разряда Uз, напряжения поддержания Uп и стабилизации этих параметров при эксплуатации. Разработаны конструкции
цветных ГИП переменного тока, в которых в зоне разряда или вблизи
ее наносится слой люминофора [2].
Принцип действия ГИП переменного тока в режиме памяти поясняется диаграммами на рис. 5.8.
61
U
Uзап
Uсм
Uз
∆Uз
UП
Uc1
∆UП
Uc
t1
Uстир
t2
∆Uc
t
Iа
t
Рис. 5.8. Диаграммы импульсов: напряжений управления и тока в ячейке
На все электроды одновременно подается знакопеременное
напряжение смещения Uсм, амплитуда которого недостаточна для зажигания газоразрядного промежутка, но достаточна для поддержания
возбужденного состояния ячейки индикации. Запись информации
осуществляется путем подачи на электроды (вертикальный и горизонтальный) выбранной ячейки импульсов записи, суммарная амплитуда которых превышает напряжение зажигания разряда (Uзап > Uз).
При пробое газоразрядного промежутка протекает импульс тока, заряжающий емкость ячейки до напряжения Uc1. После этого газоразрядный промежуток возвращается к непроводящему состоянию, благодаря чему напряжение на емкости сохраняется до следующего импульса поддерживающего напряжения. При приходе отрицательного
импульса Uсм внутреннее поле складывается с внешним (Uc1 + Uсм),
что дает возможность повторного пробоя газового промежутка. Ток
будет протекать в обратном направлении, перезаряжая емкость индикаторной ячейки до противоположной полярности. При этом изменение напряжения на емкости будет ΔUс. Далее процессы повторяются
62
через каждые полпериода поддерживающего напряжения.
Для стирания информации подается импульс стирания (Uстир) полярность и амплитуда которого достаточны для пробоя газоразрядного промежутка и компенсации заряда на диэлектрике, но не
обеспечивают перезаряд ячейки. После импульса стирания напряжение на емкости ячейки становится равным нулю и напряжение Uсм уже
не обеспечивает повторного зажигания разряда.
Оптимальная частота поддерживающего напряжения лежит в
диапазоне 40–50 кГц. Выбор Uсм, Uзап и Uсmиp производится по перезарядной и динамической характеристикам ГИП переменного тока [1],
представленных на рис. 5.9а,б соответственно. Перезарядная характеристика позволяет определить изменение напряжения на емкостях
ячеек ГИП в результате протекания импульса разрядного тока:
U ci f (U сi-1 U см ) .
ΔuC
β
Uсм
α
Uсм
γ
Ucmmin
Ucmin
UСМ
Ucmmax
t
Uстир
u
Uзап
б)
Uзапmin
а)
Рис. 5.9. Перезарядная и динамическая характеристики ГИП
Стационарный режим перезаряда емкости ячейки соответствует
условию:
U ci 2U сi-1 .
Это уравнение соответствует прямой линии, тангенс угла наклона
которой в осях (ΔUс, U) равен 2. При известном Uсм, прямая пересекает перезарядную характеристику в точках α, β, γ. Как видно из
рис. 5.9а, при Uсм < Uсм.min устойчивая разрядная серия не может существовать независимо от начального импульса записи. При
63
Uсм > Uсм.max разрядная серия существует независимо от наличия
напряжения Uc, т. е. ячейка становится неуправляемой. Управляемый
режим работы ГИП переменного тока соответствует прямой, проходящей через точки α, γ, β при поддерживающем напряжении Uсм. Для записи информации в ячейку необходимо подать импульс Uзап ≥ Uзап.min, создающий на емкости ячейки напряжение больше Uc.miт. Рабочая точка
тогда перейдет из α в устойчивое состояние β, соответствующее режиму «памяти».
Для стирания ячейки подается импульс, уменьшающий Uc таким
образом, чтобы Uc + Uсм < Uзап.min , тогда рабочая точка перейдет в область левее а и, в результате переходного процесса, разряд прекратится (ΔUс = 0 точка γ).
По перезарядной характеристике можно построить динамическую
характеристику панели, на которой ограничены области устойчивой
работы и по которой удобно выбирать Uзап и Uстир. Основные конструктивные и электрические параметры отечественных и зарубежных
индикаторов ГИП переменного тока приведены в табл.5.4 [2].
Таблица 5.4
Размер
Тип
Число
Цвет Яркость, Угол Есм,
ячейки,
индикатора ячеек
свечения кд/м2 обзора В
мм
ГИПП 6384 128×128
оранж.0,5
100
120о 100
красный
ИГПВ1
512×512
оранж.0,5
100
120о 100
512×512
красный
FPG9HRUD
512×512
(Fujitsu,
0,42
Япония)
Uзап
Uстир
80
50
80
50
5.2. Способы управления матричными индикаторами
и их реализация
Вопросы управления матричными индикаторами МИ связаны в
первую очередь с разработкой способов и схем адресации ячеек МИ,
способов и схем модуляции яркости свечения ячеек МИ и проектированием, собственно, схем систем управления МИ. В этом разделе работы и будут рассмотрены выделенные вопросы управления МИ в порядке их упоминания.
64
5.2.1. Способы адресации ячеек матричных индикаторов
Внедрение средств отображения на матричных индикаторах во
многом определяется сложностью схем управления, которая обусловлена необходимостью адресации и коммутации большого числа индикаторных ячеек, конструктивно входящих в индикаторное поле.
Основные системы адресации, используемые в системах управления матричными индикаторами, можно разделить на несколько групп:
– однокоординатная адресация;
– двухкоординатная адресация;
– многоматричная адресация;
– адресация со сканированием.
5.2.1.1. Способ однокоординатной адресации
Способ однокоординатной адресации отличается тем, что каждая
ячейка должна иметь два независимых от других ячеек входа, к которым прикладываются сигналы возбуждения [1]. В этой схеме ячейки
индикации могут включаться одновременно и на любой временной
интервал. Очевидное достоинство такой схемы – возможность реализации статической схемы индикации, т. е. возможность получения
средней яркости и времени выборки, не зависящей от информационной емкости матричной панели. Преимуществом схемы однокоординатной адресации является также отсутствие жестких требований к
параметрам индикаторной ячейки.
В то же время схема однокоординатной адресации с большой информационной емкостью имеет существенный недостаток – большое
число ключей Nкл для управления ячейками индикации Nяи и большое
число выводов Nвыв:
Nкл = Nяи,
Nвыв = Nяи+1 .
При реализации схемы однокоординатной адресации, как правило, коммутирующие ключи выполняются на одной подложке с индикатором [2].
5.2.1.2. Способ двухкоординатной (матричной ) адресации
Способ двухкоординатной адресации наиболее широко используется при управлении матричными индикаторами, так как она хорошо
65
стыкуется с конструктивным выполнением матричной панели. В
двухкоординатной матричной системе возбуждение ячейки индикации
происходит в узлах пересечения горизонтальных и вертикальных шин
матрицы.
Схема управления разбита на 2 части и вырабатывает 2 адресных
сигнала – выбирающий столбец и выбирающий строку. Общее число
коммутирующих элементов в схеме двухкоординатной адресации значительно меньше, чем в однокоординатной схеме. При числе ячеек
индикации Nяи число ключей Nкл определяется из выражения:
N кл 2 N яи – для квадратной матрицы,
N кл m n – для прямоугольной матрицы, содержащей n ячеек
индикации в строке и m строк.
Схема двухкоординатной адресации накладывает определенные
ограничения на электрооптические и временные характеристики ячеек
индикации. Это связано с эффектом крестообразной засветки некоторых типов матричных индикаторов, а также возможностью использовать при таком управлении только динамическую индикацию [1].
Рассмотрим два случая управления матричным индикатором по
двухкоординатной схеме:
– ячейки индикации не обладают вентильными свойствами;
– ячейки индикации обладают вентильными свойствами.
Для анализа схемы с ячейками, не обладающими вентильными
свойствами, рассмотрим матрицу на рис.5.10. Если к одной из строк и
столбцу матрицы приложено возбуждающее напряжение U B , то будет
светиться индикаторная ячейка, расположенная в месте их перекрещивания. Если представить ячейку на рабочем участке ВАХ как сопротивление, то эквивалентная схема питания матричной панели будет иметь вид, показанный на рис.5.11. Как видно из эквивалентной
схемы, к остальным ячейкам также прикладывается напряжение:
– к ячейкам, расположенным в строке с возбужденной ячейкой (с
учетом, что Zн >> Z1, Z2, Z3),
Z1
m 1
,
U стр U B
UB
Z1 Z 2 Z 3
m n 1
– к ячейкам, расположенным в том же столбце, что и возбужденная ячейка,
Z3
n 1
,
U столб U В
UВ
Z1 Z 2 Z 3
m n 1
66
– на остальных (m – 1)(n – 1) ячейках:
Uп UВ
Z2
1
.
UВ
Z1 Z 2 Z 3
m n 1
В результате на матричной панели, кроме выбранной ячейки, может наблюдаться более слабое свечение ячеек, расположенных в общей строке и столбце с возбужденной ячейкой. Это явление носит
наименование «кросс»-эффекта.
Защита от «кросс»-эффекта состоит в правильном выборе напряжения возбуждения по отношению к пороговому напряжению индикаторной ячейки.
1
2
n
1
2
i
zи
m
j
UB
Рис. 5.10. Модель двухкоординатной адресации для случая – ячейки
индикатора не обладают вентильными свойствами
Из рис.5.12 видно, что если Uстр и Uстолб будут меньше порогового
напряжения U0, то «кросс»-эффект наблюдаться не будет. Следовательно, для правильного включения матричного индикатора с элементами, не обладающими вентильными свойствами, необходимо возбуждающее напряжение выбирать из соотношении:
UВ
n 1
m 1
U0 , UВ
U0
m n 1
m n 1
67
Zi1
Zin
Zi2
Z1
UB
ZИ
Z11
Z2
Z(m-1)(n-1)
UB
ZИ
Z3
Zj1
Zj2
.....
Zjm
Рис. 5.11. Схемы замещения ячеек при двухкоординатной адресации
В
Uo
Uв
U
Рис. 5.12. График зависимости яркости свечения ячеек
от амплитуды возбуждающего напряжения
В прямоугольной матрице одно из этих соотношений является
основным, другое – выполняется автоматически. При т=п справедливо выражение:
2n 1
UВ
U 0
n 1
С учетом, что n >> 1,
U В 2U 0
В индикаторах, где свечение ячейки индикации начинается практически с нулевого напряжения, нужно принимать специальные
схемные меры.
Для индикаторов с вентильными свойствами ячеек адресация
осуществляется подачей на анод напряжения UB и заземлением катода
68
(рис. 5.13). При обратносмещенном элементе индикации анод подключен к нулевому потенциалу – 0, а катод – к источнику с напряжением UB, поэтому ячейка не возбуждается.
В этом случае «кросс»-эффект невозможен, так как все диоды, не
расположенные в строке и столбце, смещены в обратном направлении,
а диоды, находящиеся в строке и столбце с адресуемыми, имеют
напряжение между анодом и катодом равное нулю. В схеме двухкоординатной адресации, в отличие от однокоординатной схемы, возможна одновременная выборка ячеек, находящихся в одной строке, либо
столбце матрицы (рис. 5.13). Поэтому для формирования полной информационной страницы реализуют режим динамической индикации
с поэлементным, построчным (постолбцовым), либо функциональным
выводом информации на экран индикаторной панели.
При поэлементном методе развертки (RAT – по зарубежной терминологии [1]), когда последовательно адресуются ячейки индикации,
длительность выбора ячейки определяется критической частотой
мельканий и числом элементов точечной матрицы:
tВ
Тк
1
.
m n f кчм m n
Тогда средняя яркость изображения будет равна:
Вср Вm
tВ
В
m .
Тк m n
Из этих формул видно, что с ростом числа ячеек индикации матричной панели усложняются требования по быстродействию и световой эффективности индикаторов.
Наиболее распространен построчный способ развертки (1– LAT)
изображения в матричном индикаторе [1]. При такой развертке одновременно возбуждаются все ячейки индикации одной строки. Время
выбора ячейки и средняя яркость свечения для этого способа:
tВ
1
f кчм m
Вср
,
Вm
.
m
Развертка по столбцам аналогична построчной:
tВ
1
f кчм n
69
,
Вср
Вm
.
n
0
UB
.
.
.
0
0
UB
0
zи
UB
.
.
.
UB
Рис. 5.13. Модель двухкоординатной адресации для случая – ячейки
индикатора обладают вентильными свойствами
В функциональном способе возбуждаются только те ячейки индикации, которые входят в изображение, т. е.
tВ
1
f кчм g
,
Вср
Вm
,
g
где g – число возбуждаемых ячеек.
5.2.1.3. Способ многоматричной адресации
Многоматричные способы (M-LAT по зарубежной терминологии)
[1] используются для повышения яркости формируемого изображения, а также для снижения требований по быстродействию матричных
индикаторов.
70
Для этого индикатор разбивают на 2, либо М блоков, разделением
одной из систем электродов на 2, либо М частей. Каждая часть адресуется независимо. При разделении матрицы на две части, конструкция индикатора практически не усложняется, так как выводы вертикальных шин осуществляются с двух сторон панели. Пример матрицы, разделенной на 2 части, показан на рис.5.14.
уn
у1 у2
X1
X2
хm
2
у1
у 2
у n
Рис. 5.14. Модель способа многоматричной адресации
При реализации M-LAT развертки время выборки элемента и
средняя яркость изображения определяются по формулам:
tВ
М
,
f кчм m
71
Вср Вm
M
.
m
Простые и оригинальные конструкции для M-LAT развертки рассмотрены в [1] на примере М = 3.
Особенностью строчных и столбцовых электродов является их
фигурная форма. Горизонтальный электрод является общим для 3-х
строк изображения, а каждому столбцу соответствуют три фигурных
вертикально расположенных электрода. Число выводов такого индикатора определяется соотношением:
N выв
m
nM ,
M
где n и m соответственно число элементов в строке и число строк матрицы.
При определенных соотношениях п и т число выводов индикатора становится меньшим, чем в схеме обычной матрицы:
N выв m n .
Оптимальное значение Мопт можно определить из соотношения:
М опт
m
.
n
5.2.1.4.Способ адресация со сканированием
В индикаторах, где адресация по одному из входов создается за
счет внутренних свойств индикатора (например, в ГИП с самосканированием), выбор ячейки индикации производится только по
одной координате путем подачи, синхронно со сканирующей разверткой, импульсов на соответствующие шины индикатора. Учитывая, что
период сканирования должен обеспечивать немигающее изображение
на экране, основные параметры такой схемы адресации определяются
из соотношений:
1
, Вср Вm ,
tВ
n
f кчм n
где п – число элементов развертки сканирующей системы.
Само сканирование организуется М-фазной системой импульсов, поступающих на систему сканирования. В результате уменьшается число выводов индикатора и сложность реализации системы
управления.
72
5.2.2. Способы модуляции яркости свечения ячеек матричных
индикаторов
Для повышения информационной емкости матричных индикаторов, а также улучшения их эргономических характеристик в современных системах индикации на матричных панелях используют
модуляцию яркости свечения. Модуляция яркости свечения ячейки
матричного индикатора может осуществляться различными способами, связанными с воздействием либо на амплитуду, либо на временные параметры импульсов возбуждающего напряжения. В зависимости от параметра, с помощью которого модулируется средняя
яркость индикатора, различают следующие виды модуляций: широтно-импульсную модуляцию (ШИМ), амплитудно-импульсную модуляцию (АИМ), частотно-импульсную модуляцию (ЧИМ) и пространственно-импульсную модуляцию (ПИМ).
АИМ, ШИМ и ЧИМ соответственно иллюстрируются на рис.5.15,
где показаны импульсы возбуждающего напряжения для трех уровней
яркости.
Uв
Uв1<Uв2<Uв3
Uв3
t
АИМ
Uв2
Uв1
Тк
Uв
ШИМ
tи1
tи2
tи3
tи1<tи2<tи3
t
Тк
Uв
tи
ЧИМ
tи
tи
Тк1<Тк2
t
Тк1
Тк2
Рис. 5.15. Иллюстрация способов модуляции яркости свечения
Средняя яркость ячейки в режиме широтно-импульсной (для построчной адресации) модуляции определится из соотношения:
Вср Вm tиi Вm tиi f кчм .
m Тк
73
При АИМ средняя яркость свечения будет зависеть от вида модуляционной характеристики индикаторной ячейки Bm = f(UB):
Вср
Вmi (U в ) .
m
Возможности АИМ ограничены областью U0÷Uвт, т. е. регулировать яркость ячейки можно, изменяя возбуждающее напряжение от
порогового до напряжения насыщения. После достижения напряжения насыщения яркость индикатора практически не меняется.
При реализации ШИМ следует учитывать, что tиmin должно превышать время τст + τф + τя индикатора, что также ограничивает глубину
модуляции.
Частотно-импульсная модуляция используется в матричных индикаторах, в которых яркость свечения зависит от частоты возбуждающих импульсов, например, в вакуумно-люминесцентных индикаторах.
Пространственная модуляция использует особенности конструкции индикатора. Например, ячейка индикации может быть образована из нескольких (К) элементарных ячеек. Изменением числа светящихся точек (Кв) в пределах ячейки индикации можно модулировать среднюю яркость:
В
Всрi μ К в .
m К
Глубину модуляции в этом способе можно увеличить, задав интенсивность излучения каждой точки с весовыми коэффициентами.
Например, образовав ячейку индикации из четырех элементарных
ячеек с яркостями излучения, относящихся как двоичные числа
1:2:4:8, можно получить 16 градаций яркости.
Пространственную модуляцию можно получить, расположив ряд
ячеек индикации по глубине индикатора и разделив их светофильтрами, каждый из которых вдвое ослабляет свечение нижерасположенной
ячейки. При использовании трех ячеек, разделенных двумя светофильтрами, можно получить восемь градаций яркости [2].
5.3. Проектирование систем управления газоразрядными
индикаторными панелями
В зависимости от типов ГИП возможно проектирование разных
систем управления, обеспечивающие реализацию СОИ с различными
74
функциональ-ными возможностями. Так как ГИП делятся на три
группы, то число возможных систем управления составляет три, рассматриваемые далее.
5.3.1. Проектирование системы управления ГИП постоянного
тока с внешней адресацией
В разделе 5.1.1.1 показано, что для ГИП постоянного тока с
внешней адресацией наиболее приемлем способ построчной адресации, при которой возбуждение индикаторных ячеек строки матрицы
производится одновременно. Это требует наличия буферной памяти, в
которой должна храниться информация одной информационной строки. Структура схемы управления ГИП с построчной адресацией представлена на рис.5.16.
Шины ГИП коммутируются катодным коммутатором из групп
ключей Ky1–Kyn, осуществляющим формирование информации в одной строке матрицы. Анодные ключи Кх обеспечивают развертку информации по строкам. Каждое знакоместо размером а×b коммутируется группой Кxi – Kyi из а + b ключей.
Ключи Ky1–Kyn управляются сигналами с выходов регистров
RG1–RGn, в которые записывается информация, выводимая на строку
ГИП. Запись в регистры осуществляется в течение цикла развертки
строки, задаваемого счетчиком СТ1.
Двоичное число, последовательно нарастающее в счетчике СТ1, адресует входы ОЗУ, где записаны коды знаков, выводимых на экран ГИП.
В соответствии с кодом знака из ПЗУ выбирается графика соответствующей строки точечной матрицы знакоместа (выходы 1÷а ПЗУ). Этот
код поступает на входы С регистров и записывается в тот из них, который адресуется в данный момент счетчиком СТ1 и дешифратором
DC1, коммутирующим входы разрешения записи регистров (С). По
завершении счета СТ1, коэффициент пересчета которого равен числу
знакомест n в строке ГИП, в регистрах записываются коды, соответствующие графике всех элементов, выводимых на строку ГИП.
Возбуждение ячеек индикации осуществляется в момент окончания развертки строки подачей на катодные ключи импульса с формирователя F. Включение ключа из каждой группы Kyi произойдет при
совпадении уровня логической единицы, снимаемого с соответствующего выхода регистра, и импульса с формирователя F.
75
76
ГТИ
C
CT1
(n)
C
от ИИ
CT2
(b)
DC1
]logn[
]logM[
C
CT3
(m)
]logb[
]logM[
B
D
DC3
DC2
]logMа[
]logm[
]logm[
ОЗУ
1
m
B
b
2
1
ПЗУ
b
1
2
b
1
2
а
2
1
F
b
2
1
b
2
1
кхm
кх1
ку1
1
a
2
1
1
2
C
D
RG1
Рис. 5.16. Система управления ГИП постоянного тока
b
1
2
3
Кзап
a
a
ку2
2
a
2
1
1
C
D
2
RG2
a
a
n
a
2
1
куn
C
D
1
ГИПП
2
RGn
a
a
Таким образом, в строке возбуждаются только те ячейки, которые
входят в контуры формируемых знаков. Импульс переноса с СТ1,
формируемый по завершении каждой строки, переводит счетчик СТ2,
адресующий строки ГИП, в следующее состояние. СТ2 через дешифратор DC2 управляет анодными ключами Kxi, обеспечивая развертку
изображения по строкам, а также осуществляет выборку по строкам
графики знаков из ПЗУ. Полное заполнение СТ2 фиксирует завершение формирования информационной строки, после чего импульс переноса переводит счетчик СТЗ в новое состояние, адресуя соответствующий новой информационной строке фрагмент объема ОЗУ и, через дешифратор DC3 – в группу ключей Kxi.
Запись информации в ОЗУ производится с помощью контроллера
записи Кзап в ячейки, номера которых будет определять адрес знакоместа на панели ГИП. Разрядность кода, записываемого в ОЗУ, определяется длиной алфавита символов Ma и рассчитывается по формуле:
КОЗУ = ]log2Ma[.
Число ячеек ОЗУ определяется принципом организации записи и
форматом информационной страницы. При одностраничном ОЗУ и
формате страницы m n его объем равен:
Iозу = m n] log2Ma[.
В ПЗУ записывается графика знаков, приведенная к точечной
матрице знакоместа. Если размер матрицы знакоместа равен ab, то
объем ПЗУ может быть рассчитан из соотношения:
Iпзу = Ма а b,
где b – ближайшее к b число, кратное степени двойки (при b = 7,
b = 8).
В режиме записи адрес кодов знаков, засылаемых от источника
информации в ОЗУ, формируется с помощью маркера, реализация которого описывалась ранее в [1].
Одна из возможных схемных реализаций катодного и анодного
коммутаторов представлена на рис.5.17. Анодные ключи построены
по схеме удвоения напряжения, за счет чего снижается напряжение
источника питания, коммутируемое высоковольтными ключами. В
77
исходном состоянии транзистор VT2 проводит ток, и конденсатор С1
заряжается через VD1 и VD2 до напряжения питания, равного 200 В.
Ключ VT4 при этом закрыт и к ячейке индикации приложено нулевое
напряжение. При подаче импульса индикации VT2 запирается, a VTI
открывается. Тогда к аноду ГИП прикладывается напряжение, равное
сумме напряжений источника питания и емкости С1, т. е. 400 В.
+200В
R1
R3
R4
+5В
VT1
VD2
R9
R5
к катоду ГИП
VT3
C1
R8
VT4
R6
R2
R10
VD1
R7
к аноду
ГИП
VT2
Рис. 5.17. Принципиальная схема катодных и анодных ключей
К ячейкам, соединенным с открытым ключом VT4, при этом прикладывается 400 В и они возбуждаются. Ячейки, соединенные с закрытым VT4, имеют на электродах напряжение 200 В, которое недостаточно для возбуждения.
Регенерация изображения в устройствах отображения информации на основе ГИП постоянного тока с внешней адресацией, как правило, осуществляется с частотой, на порядок превышающей критическую частоту мельканий. При этом время выборки ячейки индикации
уменьшается, однако, в индикаторе присутствует остаточная ионизация газа, которая облегчает включение ячеек индикации и повышает
надежность работы.
5.3.2. Проектирование системы управления ГИП
с самосканированием
Структура схемы управления однострочной панелью ГИПС, фор78
мирующая знаковую информацию, представлена на рис. 5.18. Код
знака от источника информации поступает в ячейки ОЗУ. Объем памяти ОЗУ определяется длиной алфавита и числом знакомест, формируемых на ГИПС. Графика знака в координатах точечной матрицы
(как правило равна 5x7) записывается в ПЗУ, выходы которого управляют столбцами ГИПС через ключи анодов индикации (K1–Kв). Развертка вспомогательного сканирующего разряда осуществляется счетчиком (СТС) и дешифратором (DCC), формирующим трехфазную систему импульсов, коммутирующих через ключи (К1–К3) группы катодов. Нулевой катод К0 служит для формирования периода развертки
сканирующего разряда, импульс на него подается по завершению развертки информационной строки. Импульсы с генератора G одновременно подаются на счетчик (СТ1), который управляет ПЗУ, считывая с
него, синхронно с разверткой сканирующего разряда, графику столбцов точечной матрицы знака. При использовании для записи знака
матрицы 5x7 коэффициент пересчета этого счетчика берут 7, что
необходимо для выборки 5 столбцов матрицы знака и формирования'
пробела в 2 интервала
ЕА
ЕИНД
к'1
к'2
ОЗУ ]log M[
от ИИ
A
B
B
]log n[
к'3
ПЗУ
D
к'в
]log a[
ГИПС
ГТИ
C
Сч1
(а)
C
Сч2
(n)
F
к0
к1
к2
к3
ЕСК
СчС
]log 3[
DC1
79
Рис. 5.18. Система управления ГИПС
Сигнал переноса с выхода СТ1 поступает на СТ2, который является счетчиком знакомест. Коэффициент пересчета этого счетчика
обычно равен 16, либо 32 (в зависимости от типа панели). После заполнения СТ2 схема вырабатывает сигнал сброса, который поступает
на нулевой катод.
В схеме управления многострочной панелью для каждой информационной строки необходима своя буферная память (ОЗУ), знакогенератор с памятью (ПЗУ) и ключи, управляющие анодами индикации.
Управление яркостью свечения изображения легче всего реализуется в ГИПС способом ШИМ. Для этого формируется управляемая задержка между импульсом сканирования и импульсом, поступающим на аноды индикации. Таким же образом решается проблема
выделения отдельных знаков в общем тексте.
На основе ГИПС возможно создание экранов коллективного
пользования, для чего используют панели, имеющие узкий шов герметизации, что позволяет набирать информационное поле без потери
шага между знаками в строке, а строки отделяются интервалами приблизительно в высоту одного знака [1].
5.3.3. Проектирование системы управления ГИП
переменного тока
Благодаря внутренней памяти ГИП переменного тока возможно
строить на своей основе матричные индикаторы большой информационной емкости.
Управление ГИП переменного тока не требует регенерации]
изображения, а следовательно, система управления должна осуществлять только функцию адресации возбуждаемых ячеек индикации.
Структурная схема управления ГИП переменного тока представлена
на рис. 5.19.
В режиме записи (стирания) от источника информации поступают
адреса возбуждаемых ячеек индикации, которые задаются регистрами
адреса ячеек (RGХ) и (RGУ). Через дешифраторы DCX, DCУ возбуждаются высоковольтные ключи КХ и KУ, выбирающие ячейки, в которые
записывается, либо стирается, информация. При отсутствии сигналов
адресации разряд поддерживается с помощью генератора поддерживающего напряжения, подаваемого через ключи KХ и KУ. Команды управления (запись, стирание) поступают через регистр RGU и
устройство управления на генераторы управляющих импульсов ГУИХ
80
и ГУИУ.
RGX
DCХ
ГУИХ
ГПН
RGu
КХ
УУ
ГУИУ
RGУ
КУ
DCУ
ГИП ПТ
Рис.5.19. Система управления ГИП переменного тока
Вышеописанный вариант схемы системы управления ГИП переменного тока реализует функциональный способ записи, когда в каждый момент времени информация записывается в одну ячейку индикации. Время записи в таком варианте достаточно велико. Например,
при управлении газообразной панелью типа ИГПВ1 и размером
512x512 и при тактовой частоте 50 кГц, время записи информации на
панель будет составлять более 5 с. Для увеличения скорости ввода
информации используют построчный способ записи. При этом схема
управления усложняется – требуется буферное ОЗУ, в котором формируется информация, выводимая на строку ГИП.
Схема ключа для выборки i-й строки ГИП показана на рис. 5.20.
Схема содержит п идентичных каналов по числу строк ГИП. В отсутствие управляющих сигналов с дешифратора DСУ VТ1 открыт, а VТ2
закрыт. Электроды ГИП при этом через диоды VD1 и VD3 подключаются к источнику поддерживающего напряжения (см. диаграмму
напряжений на рис. 5.8). При поступлении адресного сигнала с дешифратора DСУ ключ VТ1 запирается, а VТ2 открывается, и на напряжение поддержания разряда Uгпн накладывается импульс Еупр, обеспе81
чивающий запись, либо стирание информации.
+Eупр
R1
VT2
VD1
к строке ГИП
VD2
c DCyi
VT1
VD1
Uгпн
R2
Рис. 5.20. Схема высоковольтного ключа для выборки i-ой строки ГИП
переменного тока
82
6. СВЕТОДИОДНЫЕ ЭКРАНЫ И ПРОЕКТИРОВАНИЕ
НА ИХ ОСНОВЕ СИСТЕМ ОТОБРАЖЕНИЯ ИНФОРМАЦИИ
Основу светодиодных экранов (СДЭ) составляют светодиоды
(СД), поэтому можно отметить, что СДЭ состоят из большого числа
упорядоченно расположенных СД. Поэтому вначале рассмотрим основу СДЭ – светодиоды, а затем – сами СДЭ, а также системы управления ими.
6.1. Светодиоды и их характеристики
СД – это полупроводниковый источник света, содержащий кристалл, испускающий свет того или иного цвета при приложении электрического напряжения.
Условное обозначение СД приведено на рис.6.1а, а его схема
включения в электрическую цепь – на рис.6.1б.
R
А
IСД
К
UУПР
СД
а)
б)
Рис. 6.1. Условное обозначение СД (а) и его электрическая
схема включения (б)
Как видно из рисунка, при прямом напряжении, приложенном к
СД, и пренебрежении сопротивлением СД, проводящий ток через СД
определяется из выражения:
IСД = UУПР / RД.
Из формулы следует, что при постоянной величине R ток СД зависит только от величины приложенного напряжения, поэтому ток в
этом случае будет зависеть только от UУПР, т.е. справедлива запись –
IСД = f(UУПР). Одновременно, световая характеристика СД – BСД = f (IСД),
показывает зависимость яркости свечения СД – BСД от тока IСД, протекающего через СД. Таким образом, из двух функций: IСД = f(UУПР );
BСД = f(IСД), следует третья функция: BСД = f(UУПР). График этой зависимости приведен на рис.6.2, который показывает возможность регу83
лировать яркость излучения СД путем управления амплитудой напряжения, подаваемого в цепь питания СД. Примером устройства, выходное напряжение которого принимает разные величины, является
цифро-аналоговый преобразователь (ЦАП). Таким образом, ЦАП
обеспечивают аналоговое управление яркостью СД.
Однако возможно использование
и широтно-импульсной модуляции
(ШИМ) для управления амплитудой
напряжения, подаваемого на СД, а
также других видов импульсной модуляции. Все виды модуляции, а
также вопросы их схемной реализации рассматриваются ниже.
Конструктивно СД состоит из
кристалла, к которому припаяны два
Рис. 6.2. Зависимость яркости
электрода, называемых анодом и ка(BСД ) излучения СД от напряже- тодом, как показано на рис.6.3.
ния управления (UУПР)
Излучения кристаллов, используемых в СД, имеют следующие цвета и
длины волн: синий (430–470 нм), зеленый (515–530 нм), красный (630–
670 нм). Смешиванием этих цветов в тех или иных пропорциях получаются другие цвета и их оттенки, к примеру, белый цвет определяется следующим уравнением:
W = 0,3R + 0,59G + 0,11B,
где 0,3; 0,59; 0,11 – коэффициенты интенсивностей основных цветов:
красного (R), зеленого (G), синего (B).
Основные характеристики СД по
сравнению с другими индикаторами
Корпус
определяются следующими свойствами
СД:
Кристалл
– в СД электрический ток преобраРефлектор
зуется в световое излучение непосредственно и с минимальными потерями,
т. е. СД характеризуются высоким КПД
Катод
Анод
(СД по этому параметру уступают только люминесцентным индикаторам с хоРис. 6.3. Электроды
и конструктивные элементы лодным катодом);
СД
84
– цветовое излучение происходит в узкой части спектра излучения, более узкий спектр имеет только лазер (здесь дополнительно
нужно отметить отсутствие ультрафиолетового и инфракрасного излучений, что повышает точность получения насыщенности и палитры
цветов и т. д. );
– СД характеризуются малой инерционностью;
– угол обзора СД может достигать 160 градусов (от 100 до 160
градусов), что позволяет с любой точки экрана видеть изображение
хорошо;
– современные СД столь малогабаритны, что позволяют создавать
экраны, в которых расстояния между СД составляют не более 3 мм;
– СД в своей работе не нуждаются в пусковых устройствах;
– СД характеризуется высокой механической прочностью, не
имеет спиралей, влаго- и пыленепроницаем электродов и других изнашиваемых деталей;
– СД надежен в работе, имеет длительный срок службы, к примеру, более 100 тыс. часов;
– СД электрически безопасен, так как питается малым напряжением;
– в СД отсутствуют ядовитые составляющие (ртуть и др.) и поэтому легко утилизируемы;
– СД нечувствительны к низким и очень низким температурам, в
противовес высокие температуры противопоказаны СД, как всем полупроводниковым индикаторам.
Из СД формируют элемент изображения, называемый пикселем.
6.2. Пиксель и его характеристики
Пиксель – элемент изображения (точка изображения) или минимальная структурная единица изображения. Пиксель может быть монохромным или цветным и иметь разные размеры. Чаще всего пиксели бывают таких видов: 1R–1G–1B, 1R–2G–1B, 1G–2R–1B и т. д.
(см. рис. 6.4). Это значит, что пиксели могут состоять или из одного
красного, одного зеленого и одного голубого СД, или из одного красного, двух зеленых и одного голубого СД, или из одного зеленого,
двух красных и одного голубого СД. Возможны и другие сочетания
излучаемых цветов. Примеры физических пикселей приведены на
рис. 6.4.
Физический пиксель характеризуется размером (l) и шагом в поле
экрана (h) (см. рис. 6.5). Размер пикселя – это расстояние между край85
ними точками одной стороны корпуса, а шаг пикселя h – это расстояние между центрами двух соседних пикселей.
1R-1G-1B
1G-2R-1B
1R-2G-1B
Рис. 6.4. Примеры пикселей СДЭ
Ценность пикселя определяет-
h
ся:
– числом кристаллов (СД) в
пикселе (чем больше СД разных
цветов используется в пикселе, тем
больший объем палитры цветов
создавать);
l можно
– яркостью цветовых излучений СД (чем большей яркостью
цветового излучения характеризуется СД пикселя, тем с большим
расстоянием
можно
смотреть
СДЭ);
– насыщенности цветов СД
(чем выше насыщенности цветов
СД, тем точнее создается инфорРис. 6.5. Характеристики
мационная модель в виде картины
физического пикселя
и т. д.).
Выбор шага пикселя производится в зависимости от расстояния наблюдения. Зритель не должен
замечать пиксельную структуру СДЭ. Это происходит при равенстве
углового размера между двумя точками пикселей одной угловой минуте. В этом случае расстояние составляет 40 м при шаге пикселя – 12
мм, а при шаге пикселя равном 32 мм расстояние до СДЭ может составить 120 м. Понятно, что при увеличении расстояния до СДЭ шаг
пикселя пропорционально может быть увеличен без ухудшения изображения.
Соотношение размера и шага может составлять – (0,5…0,9)/1, т. е.
l / h = (0,5–0,9) / 1.
86
Рис. 6.6. Примеры физического и виртуального пикселей
Виртуальный пиксель (ВП) – дополнительный пиксель, создаваемый программным путем из набора СД, принадлежащих соседним
физическим пикселям. Он позволяет увеличить разрешающую способность экрана в динамическом режиме и увеличить качество изображения(см. рис.6.6).
6.3. Светодиодный модуль и его характеристики
Модуль – это структурная единица СДЭ и состоит из определенного числа пикселей. Пример модуля приведен на рис.6.7. Для функционирования модуль чаще всего снабжается отдельными блоками
питания и управления.
Промышленность выпускает модули с разными функциональными возможностями. Основными характеристиками модулей являются
следующие:
– линейные размеры, определяются шириной и высотой и измеряются в мм;
– яркость, измеряется в кд/м2;
– разрешение, определяется числом пикселей по координатам Х и У;
– размеры пикселя, определяются шириной и высотой и измеряются в мм;
Рис. 6.7. Пример светодиодного модуля со структурой пикселей 2R1G1B
87
– состав пикселя, определяется числом диодов, используемых в
пикселе;
– шаг пикселя, как отмечено выше, определяется расстоянием
между центрами двух соседних пикселей и измеряется в мм;
– число цветовых оттенков, определяется всей цветовой палитрой
модуля;
– угол обзора, определяется возможностью распознавания отображаемой модулем информации, глядя со стороны, и измеряется в угловых градусах.
6.4. Светодиодный экран, особенности его конструкции
и характеристики
СДЭ состоит из заданного числа модулей, т. е. СДЭ – это модульный (наборный) экран, в котором модули складываются как по оси Х,
так и по оси У.
Исходя из определения, можно отметить, что СДЭ бывают разного размера и разной формы (квадратные и прямоугольные). Модульность СДЭ обеспечивается не только структурными единицами, из
которых формируется поверхность СДЭ, но и организацией управления и питания структурных единиц СДЭ. Это позволяет легко монтировать или демонтировать СДЭ, облегчает его обслуживание.
СДЭ характеризуются светотехническими и эксплуатационными
параметрами. Во многом они совпадают с параметрами модулей СДЭ,
поэтому совпадающие параметры в этом разделе не рассматриваются.
Светотехнические параметры СДЭ:
– яркость, кд/м2;
– контрастность;
– разрешение, число пикселей по координатам Х и У;
– шаг пикселя, мм;
– число цветовых оттенков (вся цветовая палитра);
– активная часть экрана;
– частота регенерации изображения;
угол обзора.
Эксплуатационные параметры СДЭ:
– вид исполнения;
– потребляемая мощность;
– надежность.
Рассмотрим часть параметров подробнее.
88
Яркость СДЭ. Она для применения СДЭ в помещении должна
быть в пределах 1000 кд/м2, а для применения на улице в солнечный
день не менее 5000кд/м2.
Контрастность СДЭ. Типовые значения контрастности для СДЭ в
абсолютно темном помещении лежат в пределах от 500 : 1 до 1000 : 1.
Разрешение СДЭ. Оно определяется число пикселей по горизонтали и вертикали. Данный параметр является основным критерием
качества изображения. Чем больше число пикселей по осям Х и У, тем
более разборчиво может передаваться изображение.
Угол обзора СДЭ. Этот параметр зависит от типа СДЭ и лежит в
диапазоне от 100 до 160 угловых градусов.
Число цветовых оттенков, воспроизводимых СДЭ, определяет
качество цветовой палитры СДЭ. Полноцветное изображение достигается при наличии 256 (28) оттенков каждого основного цвета системы
R, G, B, что составляет 16,78 млн. оттенков 3-х цветного пикселя. Заметим здесь, что оттенки основных цветов задаются 8-ми и 12-ти разрядными двоичными кодами.
Цветообразование СДЭ. В простейшем случае пиксель СДЭ состоит, как отмечено выше, из 3-х СД с разным цветом излучения:
красного, зеленого и синего (R, G, B). Они и обеспечивают образование различных цветов. Однако в пикселях используют и по 4 СД, к
примеру, содержащего 2 СД с цветностью излучения – красный, одного СД с цветностью излучения – зеленый и еще одного СД с цветностью излучения – синий. Другого вида пиксели с 4-мя СД содержат 2
СД с цветностью излучения – зеленый, один СД с цветностью излучения – красный и один СД с цветностью излучения – синий. Бывают
пиксели и с другим числом СД. Число и тип СД выбираются из условия максимального приближения к балансу белого цвета.
Частота регенерации изображения. Этот параметр должен выбираться из условия комфортного наблюдения за изображением на
СДЭ и составляет не менее 100 Гц.
Потребляемая мощность СДЭ. Параметр зависит от числа используемых СД в экране. Чем больше СД используется в СДЭ, тем
больше потребляемая мощность СДЭ. Как правило, суммарная потребляемая мощность определяется площадью и яркостью свечения
СДЭ.
89
6.5. Проектирование систем управления пикселем, модулем
и СДЭ
6.5.1. Проектирование системы управления пикселем СДЭ
Каждый пиксель должен принимать (селектировать) от системы
управления пикселем коды цветности, включая уровня яркости излучения этого цвета, поэтому обязательным устройством системы
управления (СУ) является селектор кода цветности пикселя. Следующей функцией СУ является селектирование кодов цветности излучения СД пикселя, которое выполняться может блоком селекторов кодов
СД пикселя. На примере пикселя, состоящего из трех СД: с красным
излучением (К), зеленым излучением (З) и синим излучением (СИ);
блок селекторов должен состоять из трех соответствующих селекторов: красного цвета, зеленого и синего цветов. Последней функцией
су должна быть преобразование кодовой информации в аналоговые
величины для задания цветности и яркости излучений СД пикселя.
Суммарное излучение всех СД и определяет оттенок палитры цветовой гаммы пикселя. Таким устройств в СУ может быть блок ЦАП, содержащий три ЦАП, соответственного для красного, зеленого и синего цветов. Вариант схемы СУ, построенный по рассмотренному алгоритму, приведен на рис. 6.8.
Рис. 6.8. Вариант системы управления пикселем СДЭ
Принятые на рис.6.8 условные обозначения:
– СУП –система управления пикселя;
– СКЦП – селектор кода цветности пикселя;
– БСКП – блок селекторов кода пикселя;
90
– СККЦ – селектор кода красного цвета;
– СКЗЦ – селектор кода зеленого цвета;
– СКСЦ – селектор кода синего цвета;
– БЦАПП – блок цифро-аналоговых преобразователей пикселя;
– ЦАПКЦ – цифро-аналоговый преобразователь красного цвета;
– ЦАПЗЦ – цифро-аналоговый преобразователь зеленого цвета;
– ЦАПСЦ – цифро-аналоговый преобразователь синего цвета.
6.5.2. Проектирование системы управления модулем СДЭ
По аналогии с СУ пикселем СУ модуля должна строиться на основе тех же функциональных устройств, но с большим объемом выполняемых функций. Таким образом, СУ модулем должна выделять
(селектировать) коды цветов модуля, из которых далее СУ должна
выделять по отдельности коды цветов каждого пикселя модуля, преобразовывать коды излучений пикселей в аналоговые величины для
подачи на пиксели модуля. Вариант схемы СУ, построенный по рассмотренному алгоритму, приведен на рис. 6.9.
Рис. 6.9. Вариант системы управления модулем СДЭ
Принятые на рис.6.9 условные обозначения:
– СУМ – система управления модуля;
– СКМ – селекторов кодов цветностей модуля;
– БСКМ – блок селекторов кодов модуля;
– СКЦП11 – селектор кода цветности пикселя П11;
– СКЦП1n – селектор кода цветности пикселя П1n;
91
– СКЦПm1 – селектор кода цветности пикселя Пm1;
– СКЦПmn – селектор кода цветности пикселя П mn;
– БЦАПМ – блок цифро–аналоговых преобразователей модуля;
– БЦАПП11 – блок цифро–аналоговых преобразователей пикселя П11;
– БЦАП1n – блок цифро–аналоговых преобразователей пикселя П1n;
– БЦАПm1 – блок цифро–аналоговых преобразователей пикселя Пm1;
– БЦАПmn – блок цифро–аналоговых преобразователей пикселя Пmn;
– М – модуль, состоящий из пикселей П11 … П1n, П m1… Пmn, расположенных в виде прямоугольной матрицы.
6.5.3. Проектирование системы управления СДЭ
Как известно, СДЭ состоит из большого числа модулей, из-за чего построение СУ СДЭ значительно сложнее, чем построение СУ модуля. Другими словами, техническая реализация СУ СДЭ требует
больших аппаратурных затрат. Для функционирования СДЭ в составе
СОИ необходимо также сложное программное обеспечение. Понятно,
что основной составляющей СОИ является СУ СДЭ.
Возможный вариант реализации СУ приведен на рис.6.10, состоящий из контроллеров, управляющего компьютера, платы видеозахвата и источников информации. В качестве последних могут быть: центральный компьютер (компьютер верхнего уровня) или любая система
сбора данных с цифровым выходом; видеокамера; DVD-плеера, спутниковый тюнер и пр.
Рис.6.10. Вариант системы управления СДЭ
92
Некоторые особенности СУ СДЭ заключаются в том, она обеспечивает передачу информации и управление светодиодными модулями
на основе контроллеров, которые подсоединены к управляющему
компьютеру. В нем устанавливается плата видеопроцессора (или плата видеозахвата), на вход которой могут подаваться видеосигналы, как
уже отмечено выше, от различных источников, к примеру, от обычного транслятора телевизионного сигнала, видеомагнитофона, DVDплеера, видеокамеры, центрального компьютера и т. д. Кроме того, на
жесткий диск управляющего компьютера могут быть записаны предварительно подготовленные сюжеты, которые можно воспроизводить
по заранее составленному сценарию.
С появлением большого числа разнообразных СДЭ в последнее
время возникает задача объединения отдельно стоящихся СДЭ в сеть с
единым центром управления. Управление отдельными СДЭ, выполняющих роль видеоэкранов, осуществляется с центрального компьютера
по каналам связи. Каналы связи обеспечивают связь с компьютерами
управления каждого отдельного СДЭ. Роль канала связи могут выполнять модем или радиомодем, выделенная телефонная линия и т. д.
93
ЗАКЛЮЧЕНИЕ
Таким образом, в работе проанализированы наиболее перспективные современные многоразрядные и матричные индикаторные
устройства и системы управления ими. Исследованы вопросы проектирования систем отображения информации с улучшенными характеристиками и расширенными функциональными возможностями. На
структурном уровне предложены разные системы управления для исследуемых индикаторов. Показано и то, что использование в составе
СОИ микропроцессоров последнего поколения в качестве основы системы управления индикаторами обеспечивает существенное улучшение характеристик и расширение функциональных возможностей
СОИ. Проектирование СОИ с улучшенными характеристиками возможно и на основе видеодисплеев, матричных индикаторов с использованием специального математического обеспечения.
Исследованы принципы проектирования таких важных составляющих СОИ, как устройства ручного ввода данных. Рассмотрены особенности реализации этих устройств.
Достаточное внимание в работе уделено наиболее перспективному классу современных индикаторных устройств – светодиодам, светодиодным модулям и светодиодным экранам. В частности, в работе
предложены принципы проектирования систем управления этими индикаторными устройствами, а также принципы построения на их основе СОИ.
94
ЛИТЕРАТУРА
1. Быстров Ю. А., Литвак И. И., Першанов Г. М. Электронные
приборы для отображения информации. М.: Радио и связь. 1985.
2. Яблонский Ф. М. Газоразрядные приборы для отображения
информации. М.: Энергия. 1990.
3. Литвак И. И., Ломов Б. В., Соловейчик И. Е. Основы построения аппаратуры отображения в АСУ. М.: Сов. Радио, 1975.
4. Поспелов Д. М. Логические методы анализа и система схем.
М.: Высшая школа. 1985.
5. Конопольченко А., Кривандин С. Управление яркостью свечения светодиодов с помощью модульных DC/DC-драйверов // Новости
электроники, №15, 2009, с.25–28.
6. Rich Rosen. Способы управления яркостью свечения светодиодов с помощью импульсных драйверов. Перевод // Электронный журнал "РадиоЛоцман", № 11, 2011.
7. Селиванов М. Светодиодные драйверы производства SiTi //
Компоненты и технологии, № 4, 2008.
8. Солдатов А. И., Макаров В. С., Сорокин П. В. Расчет схем
управления дискрет-ными индикаторами: Учебное пособие. Томск:
Изд-во ТПУ, 2009. 105 с.
9. Солдатов А. И. Электронные средства обработки и отображения информации: Учебное пособие. Томск: Изд-во ТПУ, 2008. 177.
10. Чижиков. Приборы и устройства для формирования видимого
изображения. Учебн. пособие Рязанского гос. радиотехн. акад., Рязань,
2004, 144 с.
95
Научное издание
ХАСЦАЕВ Борис Дзамболатович
ПРОЕКТИРОВАНИЕ СИСТЕМ
ОТОБРАЖЕНИЯ ИНФОРМАЦИИ НА ОСНОВЕ
МНОГОРАЗРЯДНЫХ И МАТРИЧНЫХ
ИНДИКАТОРОВ
Монография
Подписано в печать 1.07.2015. Формат 60х84 1/16. Бумага офсетная. Гарнитура «Таймс».
Печать на ризографе. Усл. п.л. 5,52. Уч.-изд. л. 4,38. Тираж 50 экз. Заказ №
.
Северо-Кавказский горно-металлургический институт (государственный технологический
университет). Издательство «Терек».
Отпечатано в отделе оперативной полиграфии СКГМИ (ГТУ).
362021, г. Владикавказ, ул. Николаева, 44.
96