когда тело можно считать материальной точкой?
advertisement

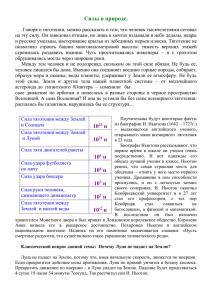
КИНЕМАТИКА Механика изучает механическое движение , то есть изменение с течением времени положения тел друг относительно друга. Основной задачей механики является определение положения тела в любой момент времени, если известны положение и скорость тела в начальный момент. В настоящей главе вводятся основные понятия для описания движения тел. Раздел механики, в котором рассматривается описание движения тел, называется кинематикой § 1. СИСТЕМА ОТСЧЕТА. ТРАЕКТОРИЯ, ПУТЬ И ПЕРЕМЕЩЕНИЕ Чтобы описать движение какого-либо тела, необходимо выбрать систему отсчета. Движение тела характеризуется его траекторией , пройденным путем, а также перемещением . СИСТЕМА ОТСЧЕТА Движение любого тела можно описывать только по отношению к какому-либо другому телу. Тело, по отношению к которому рассматривается движение всех тел в данной задаче, называется телом отсчета . Положение тела в пространстве задается с помощью системы координат , связанной с телом отсчета. Для определения положения тела в любой момент времени нужны также часы. Тело отсчета и связанные с ним система координат и часы образуют систему отсчета (рис. 1.1). Всегда ли указывается тело отсчета? Тело отсчета подразумевается всегда, когда речь идет о движении — даже тогда, когда об этом теле не упоминают явно. Часто в качестве тела отсчета подразумевается Земля. Например, когда говорят: «Автомобиль едет со скоростью 100 км/ч», имеют в виду скорость автомобиля относительно Земли. Но если говорят, что пассажир идет по вагону со скоростью 4 км/ч, имеют в виду скорость пассажира относительно вагона, то есть телом отсчета является вагон. Иногда без явного указания тела отсчета обойтись просто нельзя: например, фраза «ракета летит со скоростью 10 км/с» будет непонятной, если не указать, относительно какого тела рассматривается движение ракеты — Земли, Солнца или другой ракеты. МАТЕРИАЛЬНАЯ ТОЧКА Во многих задачах для описания движения тела достаточно задать движение только одной его точки. В таком случае тело мысленно заменяют одной точкой. Тело, размерами которого в данной задаче можно пренебречь, называется материальной точкой . Материальная точка является простейшей моделью тела, использование которой значительно упрощает описание его движения. В дальнейшем мы будем рассматривать в основном такие задачи, в которых тело можно считать материальной точкой. КОГДА ТЕЛО МОЖНО СЧИТАТЬ МАТЕРИАЛЬНОЙ ТОЧКОЙ? Можно ли считать тело материальной точкой, зависит не от размеров тела («большое» оно или «маленькое»), а от поставленной задачи . Одно и то же тело (например, самолет или Земля) в одних задачах может рассматриваться как материальная точка, а в других — нет. Тело можно считать материальной точкой, если выполнено хотя бы одно из двух условий: размеры тела малы по сравнению с расстоянием, пройденным телом. В этом случае различие в движении разных точек тела является несущественным; все точки тела движутся одинаково, то есть любой отрезок, соединяющий две точки тела, при движении остается параллельным самому себе. Такое движение называется поступательным . При поступательном движении для описания движения тела достаточно «следить» только за одной его точкой. При поступательном движении тело можно рассматривать как материальную точку, даже если длина пройденного телом пути сравнима с размерами тела. Движение самолета Если надо найти время перелета самолета между двумя городами, самолет можно считать материальной точкой, потому что размеры самолета намного меньше расстояния между городами (рис. 1.2). Если нужно описать движение самолета при выполнении им фигур высшего пилотажа, то следует учитывать, что при этом различные точки самолета движутся по-разному: самолет может покачивать крыльями, поднимать и опускать нос. Поэтому в таком случае самолет нельзя считать материальной точкой. Динамика – раздел механики, в котором изучаются законы движения материальных тел под действием сил. Осн.законы механики (зак-ны Галилея-Нютона): закон инерции (1-ый закон): материальная точка сохраняет состояние покоя или равномерного прямолинейного движения до тех пор, пока действие других тел не изменит это состояние; основной закон динамики ( 2-ой закон (Ньютона)): ускорение матер.точки пропорционально приложенной к ней силе и имеет одинаковое с ней направление mw F ; закон равенства действия и противодействия (3-й закон (Ньютона)): всякому действию соответствует равное и противоположно направленное противодействие; закон независимости сил: несколько одновременно действующих на матер.точку сил сообщают точке такое ускорение, какое сообщила бы ей одна сила, равная их геометрической сумме. В классической механике масса движущегося тела принимается равной массе покоящегося тела, – мера инертности тела и его гравитационных свойств. Масса = весу тела, деленному на ускорение свободного падения. m=G/g, g9,81м/с2. g зависит от географической широты места и высоты над уровнем моря – не постоянная величина. Сила – 1Н (Ньютон) = 1кгм/с2. Система отсчета, в которой проявляются 1-ый и 2-ой законы, назыв. инерциальной системой отсчета. Дифференциальные уравнения движения материальной точки: m a Fi , в проекции на декартовы оси коорд.: m x Fix ; m y Fiy ; m z Fiz , на оси естественного трехгранника: ma=Fi; man=Fin; mab=Fib (ab=0 – проекция ускорения d 2S V2 Fin ; 0 Fb ( – радиус кривизны на бинормаль), т.е. m 2 Fi ; m dt траектории в текущей точке). Вслучае плоского движения точки в полярных координатах: m(r r 2 ) Fr , m d 2 (r ) F . Две основные задачи динамики: первая задача r dt динамики – зная закон движения точки, определить действующую на нее силу; вторая задача динамики (основная) – зная действующие на точку силы, определить закон d2x движения точки. m 2 Fix – дифференциальное ур-ие прямолинейного движения dt точки. Дважды интегрируя его, находим общее решение x=f(t,C1,C2). Постоянные интегрирования C1,C2 ищут из начальных условий: t=0, x=x0, x=f(t,x0,V0) – частное решение – закон движения точки. x =Vx=V0, Колебательное движение материальной точки. Восстанавливающая сила (сила упругости) Fx= – cx, сила стремится вернуть точку в равновесное положение, "с" – коэффициент жесткости пружины = силе упругости при деформации, равной единице [Н/м]. Свободные 2 колебания m x cx ; обозначив c/m=k2, получаем x k x 0 – линейное однородное диффер-ное уравнение второго порядка, характеристическое уравнение: z2 + k2= 0, его корни мнимые, общее решение дифф-ного уравнения будет x= C1coskt + C2sinkt, C1,C2 – постоянные интегрирования. Для их определения находим уравнение скоростей: x = – kC1sinkt + kC2coskt, подставляем начальные условия в уравнения для х и x , откуда С1= х0, С2= x 0 /k, т.е. x= х0coskt + ( x 0 /k)sinkt. Можно обозначить С1=Аsin, C2=Acos x=Asin(kt+) – уравнение гармонических T x колебаний. А= x0 A t x 02 ( x 0 / k 2 ) –амплитуда, tg=kx0/ x 0 , – начальная фаза свободных k c/m колебаний; – циклическая частота (угловая, собственная) колебаний; период: Т=2/k=2 m / c , k и Т не зависят от начальных условий – изохронность колебаний; амплитуда и начальная фаза зависят о начальных условий. Под действием постоянной силы Р происходит смещение центра колебаний в сторону действия силы Р на величину статического отклонения ст=Р/с. Если Р – сила тяжести, то Т=2 ст / g . Затухающие колебания при действии Rx= – b x сила сопротивления, пропорциональная , обозначив b/m=2n, получаем: скорости (вязкое трение). m x cx bx x 2nx k 2 x 0 , характеристическое уравнение: z2 + 2nz + k2= 0, его корни: n 2 k 2 . а) При n<k корни мнимые z1,2= n общее x x0 t решение дифф.ур-ия имеет вид: x e nt (C1 cos k 2 n 2 t C 2 sin k 2 n 2 t ) , обозначив С1=Аsin, C2=Acos x=Ae-ntsin(kt+). * T x x0 t Множитель e-nt показывает, затухающие. График заключен что колебания между двумя симметричными относительно оси t кривыми A x 02 x=Ae-nt. Из начальных условий: x0 k2 n2 ( x 0 nx 0 ) 2 , tg ; частота затухающих колебаний: k*= 2 2 x nx 0 k n k 2 n 2 ; период: T * 2 T , период затухающих колебаний больше 2 k* 1 (n / k ) периода свободных колебаний (при небольших сопротивлениях Т*Т). Амплитуды колебаний уменьшаются: * A i 1 e nT 2 Ai – декремент колебаний; –nT*/2 логарифмический декремент; "n" – коэффициент затухания. Б) Апериодическое движение точки при n k или b 2 mc . При n > k корни характеристич-ого общее x e nt (C1e n 2 k 2 t ур-я C2e n 2 k 2 t вещественны, ) , обозначая С1=(В1+В2)/2, решение: С2=(В1-В2)/2, x e nt (B1ch n 2 k 2 t B 2 sh n 2 k 2 t ) (ch, sh – гиперболические косинус и синус), если ввести В1= Аsh, В2= Аch, то x A e nt sh( n 2 k 2 t ) – это уравнение не колебательного движения (апериодического), т.к. гиперболический синус не является периодической функцией. При n = k корни характеристич. ур-я вещественны, равны и отрицательны: z1=z2= – n, общее решение: x e nt (C1 t C 2 ) , или x e nt [ x 0 ( x 0 nx 0 ) t ] , движение также апериодическое. Вынужденные колебания кроме восстанавливающей силы действует переменная возмущающая сила, обычно, по гармоническому закону: Q = Hsin(pt+), р – частота возмущающей силы, – начальная фаза. m x cx H sin( pt ) , h=Н/m, x k 2 x h sin( pt ) – дифференциальное уравнение вынужденных колебаний (неоднородное линейное дифф-ное ур-ие). Его общее решение = сумме общего решения 2 однородного уравнения x k x 0 и частного решения данного уравнения: х = х*+х**. х*= C1coskt + C2sinkt, х**= Asin(рt+) – частное решение ищется в виде подобном правой части уравнения. Подставляя решение в уравнение, находим x t A h , k 2 p2 х = C1coskt + C2sinkt+ отклонения: Аст= Н/с, h sin(рt+). k 2 p2 Величина статического A 1 – коэфф-нт динамичности, во скослько раз A ст 1 p 2 / k 2 амплитуда колебаний превосходит статическое отклонение. При p=k = – явление резонанса (частота возмущающей силы равна частоте собственных колебаний, при этом амплитуда неограниченно возрастает). При p/k1 наступает явление, называемое биениями: x получаем 2h pk 2h pk sin( t ) cos(pt ) . Обозначая A 2 sin( t) , 2 2 2 2 k p k p 2 x=A(t)cos(pt+) – происходит наложение дополнительных колебаний, вызванных возмущающей силой, на собственно вынужденные колебания – колебания частоты р, амплитуда которых является периодической функцией. Явление резонанса возникает при совпадаении частот вынужденных и свободных кол-ний 2 точки p=k. Диф-ное ур-ние: x k x h sin( kt ) . Частное решение: x t х**= Вtcos(kt+), B=–h/(2k), т.е. общее решение диф-ного ур-ния: х = C1coskt + C2sinkt – –h/(2k)tcos(kt+). Ур-ние показывает, что амплитуда вынужденных колебаний при резонансе возрастает пропорционально времени. Период Т=2/k, фаза вынужденных колебаний отстает от фазы возмущающей силы на /2. +Hsin(pt+), Вынужденные колебания при наличии вязкого трения: m x cx bx x 2nx k 2 x h sin( pt ) , общее решение в зависимости от величины k и n: 1) при n<k x Ae nt sin( k 2 n 2 t ) 2) при n>k x Ae nt sh( n 2 k 2 t ) 3) при n=k h ( k 2 p 2 ) 2 4n 2 p 2 h ( k 2 p 2 ) 2 4n 2 p 2 sin( pt ) ; sin( pt ) ; 5.2. Механика Галилея как основа механики Ньютона. Известно, что Евклид строил свою геометрию, вводя вначале постулаты, аксиомы, определения. Подобным же образом действовал Галилей, создавая свою механику. Подобно тому как Евклид устанавливал соотношения в пространстве, Галилей выявлял характер движения тел. Он ввёл определения силы, скорости, ускорения, равномерного движения, инерции, понятия средней скорости и среднего ускорения. Скорость он, в частности, определял как отношение пройденного пути к затраченному времени, а силу сопоставлял такому математическому понятию как вектор, т.е. пользовался практически современным научным языком. Галилей сформулировал четыре аксиомы. 1-я аксиома (Закон инерции). Свободное движение по горизонтальной плоскости происходит с постоянной по величине и направлению скоростью. (Интересно отметить, что это утверждение никак не следует из опыта – ведь на практике мы видим постепенное замедление движения и Галилей использовал принцип идеализации, мысленный эксперимент). 2-я аксиома: свободно падающее тело движется с постоянным ускорением и конечная скорость тела, падающего из состояния покоя, связано с высотой, которая пройдена к этому моменту как V2 = 2gH. 3-я аксиома: свободное падение тел можно рассматривать как движение по наклонной плоскости, а горизонтальной плоскости соответствует закон инерции. 4-я аксиома (принцип относительности) также построена путем мысленных экспериментов, путем абстракции. Галилей доказал, что траектория падающего тела отклоняется от вертикали из-за сопротивления воздуха и в безвоздушном пространстве тело упадет точно над точкой, из которой началось падение. То же происходит при падении тела с мачты движущегося с абсолютно постоянной скоростью корабля, но человеку, стоящему на берегу, траектория его падения представится в виде параболы. Здесь роль корабля сводится к сообщению телу начальной скорости V0. Действительно, из курса школьной физики нам известно, что траектория вылетающего из пушки снаряда также представляет собой параболу. В своем знаменитом труде «Диалог о двух главнейших системах мира: птолемеевой и коперниковой» (1632 год) (ранее уже упоминавшемся), Галилей подробно рассматривал принцип относительности. Он рассматривает мысленный опыт на движущемся корабле. («Сотни раз, сидя в своей каюте, я спрашивал себя: движется ли корабль или стоит на месте?»). Так Галилей сформулировал принцип, получивший название Принципа относительности Галилея следующим образом. Внутри равномерно движущейся (т.н. инерциальной) системы все механические процессы протекают так же, как и внутри покоящейся. В этой же книге Галилей опроверг аристотелевские представления о движении. 5.3. Механика Ньютона. Исаак Ньютон (1643-1727), родившийся вскоре смерти Галилея, унаследовал, таким образом, все методы, знания и новые идеи предыдущего поколения учёных и создал теорию, которая на два столетия (!) определила развитие науки. В своем основном труде «Математические начала натуральной философии», опубликованной по настоянию и на деньги своего друга – астронома Э. Галлея (открывшего, в частности, знаменитую комету Галлея), обобщил открытия Галилея в качестве двух законов, добавив к ним третий закон и закон всемирного тяготения. К первому изданию «Начал» Ньютон написал предисловие, в котором говорит о тенденции современного ему естествознания подчинить явления природы законам математики. Далее Ньютон определяет свою работу как «математические основания физики». Он пишет, что задачи физики состоят в том, чтобы по явлениям движения распознать силы природы, а затем по этим силам объяснить все остальные явления. Итак, вспомним знаменитые законы механики Ньютона. I закон, или закон инерции. (Фактически, это закон, открытый еще Галилеем, но сформулированный более строго): всякое тело сохраняет состояние покоя или равномерного прямолинейного движения, пока оно не будет вынуждено изменить его под действием каких-то сил. II закон. Этот закон по праву является ядром механики. Он связывает изменение импульса тела (количества движения) P=m*V с действующей на него силой , т.е. изменение импульса тела в единицу времени равно действующей на него силе и происходит в направлении ее действия. Так как в механике Ньютона масса не зависит от скорости (в современной физике, как мы впоследствии увидим, это не так), то, где а – ускорение противодействия равны по величине и противоположны по направлению. Масса в этом выражении предстает как мера инертности. Нетрудно увидеть, что при постоянной силе воздействия ускорение, которое можно придать телу тем меньше, чем больше его масса. III закон отражает тот факт, что действие тел всегда носит характер взаимодействия, и что силы действия и противодействия равны по величине и противоположны по направлению. IV закон, сформулированный Ньютоном – это закон всемирного тяготения. Логическая цепочка этого открытия может быть выстроена следующим образом. Размышляя о движении Луны, Ньютон сделал вывод, что она на орбите удерживается той же силой, под действием которой камень падает на землю, т.е. силой тяготения: «Луна тяготеет к Земле и силою тяготения постоянно отклоняется от прямолинейного движения и удерживается на своей орбите». Используя формулу своего современника Гюйгенса для центростремительного ускорения и астрономические данные, он нашел, что центростремительное ускорение Луны в 3600 раз меньше ускорения падения камня на Землю. Поскольку расстояние от центра Земли до центра Луны в 60 раз больше радиуса Земли, то можно предположить, что сила тяготения убывает пропорционально квадрату расстояния. Затем, на основе законов Кеплера, описывающих движение планет, Ньютон распространяет этот вывод на все планеты. («Силы, которыми главные планеты отклоняются от прямолинейного движения и удерживаются на своих орбитах, направлены к Солнцу и обратно пропорциональны квадратам расстояний до центра его»). Наконец, высказав положение о всеобщем характере сил тяготения и одинаковой их природе на всех планетах, показав, что «вес тела на всякой планете пропорционален массе этой планеты», установив экспериментально пропорциональность массы тела и его веса (силы тяжести), Ньютон делает вывод, что сила тяготения между телами пропорциональна массе этих тел. Так был установлен знаменитый закон всемирного тяготения, который записывается в виде: , где g – гравитационная постоянная, впервые определенная экспериментально в 1798 году Г. Кавендишем. По современным данным g = 6,67*10 -11 Н*м2/кг2. Важно отметить, что в законе всемирного тяготения масса выступает в качестве меры гравитации, т.е. определяет силу тяготения между материальными телами. Важность закона всемирного тяготения состоит в том, что Ньютон, таким образом, динамически обосновал систему Коперника и законы Кеплера. Примечание. О том, что сила тяготения обратно пропорциональна квадрату расстояния, догадывались некоторые ученые и до Ньютона. Но только Ньютон сумел логически обосновать и убедительно доказать этот закон с помощью законов динамики и эксперимента. Следует обратить внимание на важный факт, свидетельствующий о глубокой интуиции Ньютона. Фактически Ньютон установил пропорциональность между массой и весом, что означало, что масса является не только мерой инертности, но мерой гравитации. Ньютон отлично понимал важность этого факта. В своих опытах он установил, что масса инертная и масса гравитационная совпадают с точностью до 10-3. Впоследствии А. Эйнштейн, считая равенство инерционной и гравитационной масс фундаментальным законом природы, положил его в основу общей теории относительности, или ОТО. (Интересно, что в период создания ОТО это равенство было доказано с точностью до 5×10-9, а в настоящее время оно доказано с точностью до 10-12‑ .) В третьей части книги Ньютон изложил Общую Систему Мира и небесную механику, в частности, теорию сжатия Земли у полюсов, теорию приливов и отливов, движения комет, возмущения в движении планет и т.д. на основе закона всемирного тяготения. Утверждение Ньютона о том, что Земля сжата у полюсов, было экспериментально доказано в 1735-1744 гг. в результате измерения дуги земного меридиана в экваториальной зоне (Перу) и на севере (Лапландия) двумя экспедициями Парижской Академии наук. Следующим большим успехом закона всемирного тяготения было предсказание учёным Клеро времени возвращения кометы Галлея. В 1682 г. Галлей открыл новую комету и предсказал ее возвращение в сферу земного наблюдения через 76 лет. Однако в 1758 г. Комета не появилась, и Клеро сделал новый расчет времени ее появления на основе закона всемирного тяготения с учетом влияния Юпитера и Сатурна. Назвав время ее появления – 4 апреля 1759 г., Клеро ошибся всего на 19 дней. (Успехи теории тяготения в решении проблем небесной механики продолжались и в 19 веке. Так в 1846 г. Французский астроном Леверье писал своему немецкому коллеге Галле: «направьте ваш телескоп на точку эклиптики в созвездии Водолея на долготе 326 градусов, и вы найдете в пределах одного градуса от этого места новую планету с заметным диском, имеющую вид звезды приблизительно девятой величины.» Эта точка была вычислена Леверье и независимо от него Адамсом (Англия) на основе закона всемирного тяготения при анализе наблюдаемых «неправильностей» в движении Урана и предположения, что вызываются они влиянием неизвестной планеты. И действительно, 23 сентября 1846 г. Галле в указанной точке неба обнаружил новую планету. Так родились слова «Планета Нептун открыта на кончике пера».) 5.4. Ньютоновская методология исследований. В работах Ньютона раскрывается его мировоззрение и методология исследований. Ньютон был убежден в объективном существовании материи, пространства и времени, в существовании объективных законов мира, доступных человеческому познанию. Своим стремлением все в мире свести к механике Ньютон поддерживал т.н. механистический материализм (механицизм), являющийся разновидностью редукционизма. Ньютон верил в Бога, серьезно относился к религии, однако не искал сверхъестественных причин явлений природы и в ответ на вопрос клерикалов – мыслима ли материальная природа тяготения или тяготение представляет собой проявление божественной воли? – отвечал: «… я не указывал причины самого тяготения. Причину я до сих пор не мог вывести из явлений, гипотез же я не измышляю». (Другой вариант ответа: «я не нуждался в этой гипотезе» т.е. гипотезе Бога). Свой метод познания Ньютон характеризует следующим образом: «Вывести два или три общих принципа движения из явлений и после этого изложить, каким образом свойства и действия всех телесных вещей вытекают из этих явных принципов…» Под принципами Ньютон подразумевает наиболее общие законы, лежащие в основе физики. Впоследствии этот метод был назван методом принципов. Требования к научному исследованию Ньютон изложил в виде 4-х правил. 1. Не должно принимать в природе иных причин сверх тех, которые истинны и достаточны для объяснения явлений. (Этот принцип известен также как принцип «бритвы Оккама» по имени средневекового философа Оккама и означающий, что не следует привлекать дополнительные понятия, явления, причины («сущности») для объяснения явлений, если они могут быть объяснены известными причинами). 2. Одинаковым явлениям следует приписывать одинаковые причины. 3. Независимые и неизменные при экспериментах свойства тел, подвергнутых исследованию, надо принимать за общие свойства материальных тел. 4. Законы, индуктивно (т.е. путем обобщения), выведенные из опыта, нужно считать верными, пока им не противоречат другие наблюдения. Поскольку принципы устанавливаются путем исследования явлений природы, то вначале они представляют собой гипотезы, из которых путем логической дедукции (сведения от общего к частному) получают следствия, проверяемые на практике. Метод Ньютона есть, по сути, гипотетико-дедуктивный метод, который в современной физике является одним из основных для построения физических теорий. Метод Ньютона получил высокую оценку в методологических высказываниях многих ученых, в том числе А. Эйнштейна и известного советского физика С.И. Вавилова. 5.5. Оптика Ньютона двойственной природе света. – предвосхищение современной концепции о Важно знать, что Ньютон занимался не только проблемами механики. Он – автор ряда работ по оптике, в которых поставил очень важный и сложный вопрос: «Не являются ли лучи света очень мелкими частицами, испускаемыми светящимися телами?» Утвердительный ответ на этот вопрос лежит в основе корпускулярной теории света (<лат. corpuscula - частица). Эта теория была безоговорочно принята последователями Ньютона и стала господствующей в оптике 18-го века, однако многие ученые с ней не соглашались. Ведь она не могла объяснить такие явления как интерференция и дифракция света, которые легко объяснялись на основе волновых представлений о природе света. Интерференция света – явление взаимного усиления или ослабления света до полной темноты (гашения) при наложении двух его волн, которые имеют одинаковые частоты колебаний. Дифракция – свойство волн огибать препятствия. К чести Ньютона, в ответ на поставленный вопрос он не был категоричен, и в теории света он хотел объединить корпускулярные и волновые (континуальные) представления. В этом проявилось величие Ньютона. Действительно, если 19-й век оказался триумфом волновой теории света, то в 20-м веке вновь была показана необходимость сохранить представление о свете как о потоке частиц – фотонов. Современная физика установила двойственную (корпускулярно-волновую природу света). Ньютону принадлежат и другие гениальные идеи. Первая – о возможном превращении тел в свет и обратно. Ньютон писал: «Превращение тел в свет и света в тела соответствует ходу природы, которая как бы услаждается превращениями». В 1933-1934 гг. были впервые открыты факты превращения электрона и его античастицы – позитрона в гамма-кванты (фотоны), а также рождение электрона и позитрона при взаимодействии фотона с зараженными частицами. Вторая идея – о влиянии тел на распространение света. «Не действуют ли тела на свет и не изгибают ли этим действием его лучей? – спрашивал Ньютон. Этот эффект был предсказан общей теорией относительности (ОТО) А. Эйнштейна в 1916 г. и подтвержден в 1919 г. во время солнечного затмения. Дальнейшее развитие механики Ньютона связано с работами Л.. Эйлера (петербургского академика, 1707-1783гг.), французского механика Лагранжа и других ученых и сопровождалось проникновением в механику методов интегрально- дифференциального исчисления и поисками более общих принципов, чем принципы, сформулированные Ньютоном.