Основой системы GPS являются навигационные спутники, движущиеся
advertisement

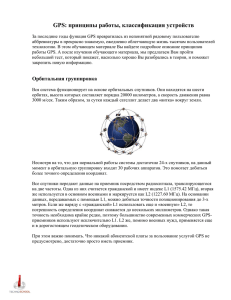
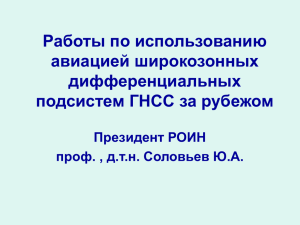
Основой системы GPS являются навигационные спутники, движущиеся вокруг Земли по 6 круговым орбитальным траекториям (по 4 спутника в каждой), на высоте 20180 км. Спутники GPS обращаются вокруг Земли за 12 часов, их вес на орбите составляет около 840 кг, размеры - 1.52 м. в ширину и 5.33 м. в длину, включая солнечные панели, вырабатывающие мощность 800 Ватт. 24 спутника обеспечивают 100 % работоспособность системы навигации GPS в любой точке земного шара. Максимальное возможное число одновременно работающих спутников в системе NAVSTAR ограничено числом 37. В настоящий момент на орбите находится 32 спутника, 24 основных и 8 резервных на случай сбоев. Слежение за орбитальной группировкой осуществляется с главной управляющей станции (Master Control Station - MCS), которая находится на базе ВВС Шривер, шт. Колорадо, США. С нее осуществляется управление системой навигации GPS в мировом масштабе. База ВВС Шривер (Schriever) является местом размещения 50-го космического соединения США - подразделения командования воздушно-космических сил. Наземная часть системы GPS состоит из десяти станций слежения, которые находятся на островах Кваджалейн и Гавайях в Тихом океане, на острове Вознесения, на острове Диего-Гарсия в Индийском океане, а также в Колорадо-Спрингс, в мысе Канаверел, шт. Флорида и т.д.. Количество наземных станций непрерывно растет, на всех станциях слежения используются приемники GPS для пассивного слежения за навигационными сигналами всех спутников. Информация со станций наблюдения обрабатывается на главной управляющей станции MCS и используется для обновления эфемерид спутников. Загрузка навигационных данных, состоящих из прогнозированных орбит и поправок часов, производится для каждого спутника каждые 24 часа. Определение координат и GPS навигация. Основой идеи определения координат GPS-приемника является вычисление расстояния от него до нескольких спутников, расположение которых считается известным. Определение местоположения GPS-приёмника в пространстве осуществляется на базе алгоритма измерения расстояния от точки наблюдения до спутника. Дальнометрия основана на вычислении расстояния по временной задержке распространения радиосигнала от спутника к приемнику. Если знать время распространения радиосигнала, то пройденный им путь легко вычислить. Приёмники работают в пассивном режиме и вычисляют свои координаты, но это совсем не означает, что координаты GPS-приёмника будут известны кому либо, кроме его владельца. Каждый спутник системы GPS непрерывно генерирует радиоволны двух частот - L1=1575.42МГц и L2=1227.60МГц. Каждый GPS-приемник имеет собственный генератор, работающий на той же частоте и модулирующий сигнал по тому же закону, что и генератор спутника. Таким образом, по времени задержки между одинаковыми участками кода, принятого со спутника и сгенерированного самостоятельно, можно вычислить время распространения сигнала, а, следовательно, и расстояние до спутника. Основная проблема при вычислении расстояния до спутника системы GPS связанна с синхронизацией часов на спутнике и в приемнике. Даже мизерная погрешность может привести к огромной ошибке в определении расстояния. Каждый спутник несет на борту высокоточные атомные часы, которые встроить в обычный GPS-приёмник невозможно. Чтобы скоррелировать временное рассогласование и избежать огромных ошибок в позиционировании, в систему GPS введен принцип избыточности для определения трехмерных координат на поверхности Земли. GPS-приёмник использует сигналы не трех, а как минимум четырех спутников и на основании вспомогательных сигналов вносит все необходимые коррективы в работу своих часов. Кроме навигационных сигналов, спутник непрерывно передает различную служебную информацию. GPSприёмник получает, например, эфемериды (точные данные об орбите спутника), прогноз задержки распространения радиосигнала в ионосфере, а также сведения о работоспособности спутника (так называемых “альманах”, содержащий обновляемые каждые 12.5 минут сведения о состоянии и орбитах всех спутников). Эти данные передаются со скоростью 50 бит/с на частотах L1 или L2. Теперь попробуем наглядно и максимально просто объяснить, каким же образом вычисляются координаты GPS-приёмника. Расстояние до навигационных спутников системы GPS обозначим как А, В и С. Допустим, что известно расстояние А до одного спутника. В данном случае координаты GPS-приемника определить нельзя, т.к. он может находится в любой точке сферы с радиусом А, описанной вокруг спутника. Если известна удаленность В приемника от второго спутника, то определение координат также не представляется возможным - объект находится где-то на окружности (показана синим цветом), которая является пересечением двух сфер. Известное расстояние С до третьего спутника сокращает неопределенность в координатах до двух точек (обозначены красными точками). Этого уже достаточно для однозначного определения координат GPSприемника. Не смотря на то, что мы имеем две точки с координатами, только одна находится на поверхности Земли, а вторая, ложная, оказывается либо глубоко внутри Земли, либо очень высоко над ее поверхностью. Таким образом, теоретически для трехмерной GPS навигации достаточно знать расстояния от приемника до трех спутников, но как мы уже говорили GPS-приемник, использует сигналы не трех, а как минимум четырех спутников и на основании вспомогательных сигналов вносит все необходимые коррективы для повышения точности навигации. Радиус сфер на рисунке напрямую зависят от скорости распространения радиосигнала в атмосфере Земли (в идеале скорость света). Если ошибки траектории и ухода часов спутников не зависят от текущего местоположения пользователя и учитываются в вычислениях позиции одинаково, то атмосферные задержки во многом определяются спецификой местности. Более того, с учетом модернизации космических аппаратов и наземных сегментов GPS, за последние несколько лет уровень «системных» ошибок значительно снизился. Поэтому основной вклад в общую ошибку позиционирования вносят именно атмосферные ошибки, связанные с задержкой распространения сигнала при прохождении ионосферного и тропосферного слоев. Для устранения этих ошибок в позиционировании используются различные виды корректирующих сигналов. 1. DGPS Differential Global Position System - «дифференциальная система GPS». DGPS используется для исключения атмосферных искажений сигнала на приемниках. Сигналы DGPS коррекции посылают пользователям по радио. Основные источники сигналов DGPS - это радионавигационные маяки и спутники на геостационарной орбите. Сигналы дифференциальной коррекции от радиомаяков передаются на средних частотах (283,5-325 кГц.). Радиосигналы на этих частотах подвержены отражению от земной поверхности. Поэтому холмистая и горная местность обычно не влияет на прием сигнала. Однако в глубоких каньонах далеко от радиомаяка, где радиосигналы традиционно слабы, сигналы коррекции могут быть и не приняты. Геостациона́рная орби́та (ГСО) — круговая орбита, расположенная над экватором Земли (0° широты), находясь на которой, искусственный спутник обращается вокруг планеты с угловой скоростью, равной угловой скорости вращения Земли вокруг оси, и постоянно находится над одной и той же точкой на земной поверхности. Геостационарная орбита является разновидностью геосинхронной орбиты и используется для размещения искусственных спутников (коммуникационных, телетрансляционных и т. п.) Спутник должен обращаться в направлении вращения Земли, на высоте 35 786 км над уровнем моря (вычисление высоты ГСО см. ниже). Именно такая высота обеспечивает спутнику период обращения, равный периоду вращения Земли (сидерические сутки: 23 часа, 56 минут, 4,091 секунды). 2. SBAS (Space Based Augmentation System) он же WADGPS (Wide Area Differential GPS) – поправки с помощью спутников и наземных станций. WAAS (Wide Area Augmentation System) – США в Европе – EGNOS, в Японии - MSAS. Система WAAS содержит более 20 базовых станции (WRS), расположенных на всей территории Соединенных Штатов. Каждая их станций оборудована GPS аппаратурой и специальным программным обеспечением, предназначенным для приема GPS сигналов, анализа полученных измерений, вычисления ошибок ионосферы, отклонений траекторий и часов спутников. Эти данные передаются на центральную станцию управления (Master Station - WMS), где повторно обрабатывается и анализируются с учетом измерений, полученных со всех базовых станций сети. Затем корректирующая информация передается на геостационарные спутники и уже оттуда ретранслируются пользователям. Разработчики системы WAAS предложили специальную координатную сетку поправок, для описания модели ионосферных задержек. Поверхность Земли поделена на 9 зон, каждая из которых содержит 201 точку (последняя - 200). Для каждой точки, с учетом данных базовых станций, моделируется и вычисляется значение ионосферной задержки. Любой из геостационарных спутников SBAS (системы WAAS, EGNOS и т.д) покрывает ограниченную территории, соответственно он может передавать информацию только для 3-4 зон. Эти ограничения связано с территориальной принадлежностью систем и расположением сети базовых станций WAAS, определяющих точность моделирования поправок. Считается, что каждая станция эффективно «покрывает» окружающую территорию радиусом 400-500 км. Время передачи данных с базовых станций на геостационарные спутники WAAS составляет несколько секунд. В рабочем режиме, обновление данных связанных с ошибками часов и эфемерид осуществляется с периодом 2 минуты. Данные ионосферные задержек обновляются несколько реже, потому что изменяются во времени значительно медленнее. Для вычисления значение ионосферной ошибки в текущем местоположении GPS приемник использует данные 4-х соседних «узловых» точек. Если текущее местоположение находится в непосредственной близости от «узловой» точки, то дополнительные вычисление могут не понадобится. Навигационные приемники идентифицирую геостационарные спутники WAAS по номерам, значение которых больше 32. Номера с 1 по 32 строго закреплены за спутниками GPS и привязаны к псевдошумовому коду (PRN) Ниже приведена таблица соответствий между названием спутника, его номером и идентификационным номером, который используется в приемниках «Garmin». Координаты каждого спутника определены только значением долготы, так как широта экватора соответствует 0 градусов. Параметр Inmarsat 3f2 Inmarsat 3f4(AOR-W) ARTEMIS Inmarsat 3f5(IOR-W/F5) Inmarsat 3f1 (IOR) Inmarsat 3f3(POR) PanAmSat(LM-RPS-1) MTSAT2 Номер 120 122 124 126 131 134 135 137 ID Garmin 33 35 37 39 44 47 48 50 Координаты W15.5 W142 E21.4 E25.0 E64 E178 W133 E145 Планируется, что через несколько лет общее количество геостационарных спутников всех SBAS систем может достигнуть 19-и. EGNOS (European Geostationary Navigation Overlay Service). Европейский аналог WAAS называется EGNOS. Система EGNOS включает 3 геостационарных спутника, принадлежащих двум компаниям Artemis и Inmarsat, каждая из которых имеет свою независимую сеть наземных станций. Первой компании принадлежит спутник под номером - 124 , второй спутники под номерами – 120 и 126 . Для Москвы возвышение спутников 25-30 градусов. Фактически, спутники находятся не намного выше уровня горизонта. Поэтому в лесу и городах с плотной застройкой, сигнал со спутников EGNOS будет недоступен для приема навигационной аппаратуре. Чем восточнее находится пользователей, тем меньше становится угол, и соответственно, тем сложнее «увидеть» сигнал. Но все же основная проблема заключается не в видимости спутников, а в отсутствии на территории России сети наземных станций для вычисления поправок. Более того, в России нет ни одной базовой станции. Поэтому в составе корректирующих сообщений EGNOS нет данных для «узловых» точек, относящихся к территории России. Исключение составляют западные приграничные территории, которые «захватываются» действием базовых станций, расположенных в Финляндии и Польше. 2. Дифференциальный сервис OmniSTAR OmniSTAR предлагает три уровня DGPS поправок: VBS, HP, и XP. При этом необходимо знать, что с поправками OmniSTAR HP/XP могут работать только двухчастотные профессиональные приемники с установленным специальным программным обеспечением, например, Trimble AgGPS 252, AgGPS 332, EZ-Guide 500. Поправка OmniSTAR VBS обеспечивает точность прохождения параллельных рядов примерно 20 см, стабильна во времени, после включения аппаратуры не требуется ожидание набора точности. OmniSTAR HP — сетевая технология базовых станций. OmniSTAR XP — высокоточные орбитальные и временные данные. В сервисе OmniSTAR HP используются измерения ближайших базовых станций всемирной опорной сети. В радиусе 1000 км расположено достаточное число одновременно доступных спутников GPS, чтобы гарантировать высокую точность позиционирования. На расстоянии, превышающем 1000 км, точность позиционирования постепенно ухудшается. Система OmniSTAR XP служит дополнением к OmniSTAR HP, но в то же время является полностью независимой. Она основывается на использовании высокоточных данных орбит (эфемерид) и часов спутников, формируемых в режиме реального времени на основе данных от всемирной сети базовых станций NASA и IGS и постоянно транслируемых геостационарным спутником. Положение спутников GPS известно с точностью 20–30 см, а ошибка спутниковых часов — с точностью наносекунд, следовательно, используя эти данные, можно определять местоположение объектов с дециметровой точностью без использования какой-либо базовой станции. Благодаря тому, что сервис OmniSTAR HP сочетает в себе технологии HP и XP, достигается устойчивое к сбоям определение плановых координат, при этом: — на большом удалении от базовых станций вычисления проводятся по высокоточным данным орбит (эфемерид) и часов спутников; — вблизи от базовых станций для вычислений используются данные этой сети. Точность определения позиции с использованием поправки OmniSTAR HP/XP увеличивается постепенно, начиная от момента включения приемника и обнаружения спутника OmniSTAR. Этот процесс называется конвергенцией (англ. convergence). Конвергенция до абсолютной точности 4-5 см занимает обычно 10-20 мин. Подписку на дифференциальные поправки OmniSTAR можно оформлять на нужный Вам период времени. Например, на время посевной кампании включить высокоточную поправку OmniSTAR HP/XP, а в дальнейшем, для внесения удобрений и СЗР использовать поправку OmniSTAR VBS. На зимний период подписку можно не оформлять, однако, подписываясь на год, покупатель получает значительную скидку. Кроме этого, дифференциальные поправки OmniSTAR делятся на группы по величине охвата территории. Существует локальный сервис (так называемая сельскохозяйственная лицензия), действующий в радиусе 100 км от точки, указанной пользователем, и региональный – действующий в радиусе примерно 500 км. Чтобы оформить подписку, пользователем должна быть предоставлена следующая информация: - фирма-изготовитель и модель GPS приемника; - серийный номер GPS приемника; - необходимый вид DGPS сервиса; - предполагаемый район проведения работ (для оформления сельскохозяйственной лицензии – центральная точка зоны с радиусом 100 км); - удобное для покупателя дата и время активации, когда необходимо включить приёмник GPS Внутренняя поправка e-Dif Формируется специальным программным обеспечением, встроенным в GPS приемник. Обеспечивает точность движения по параллельным рядам от 20 до 30 см. В настоящее время работает только в устройствах параллельного вождения Outback, Autofarm, Raven. Особенность данной поправки – так называемый «дрейф» позиции, что означает ухудшение точности с течением времени. Этот недостаток легко устраняется периодической коррекцией базовой линии (см. инструкцию по эксплуатации систем Outback). Базовая станция Состоит из GPS приемника и радио модема, который передает корректирующий сигнал на радио модемы, подключенные к навигаторам. Так как базовая станция неподвижна и между передающим и принимающим модемами относительно небольшое расстояние, то радиус сферы от станции (см. рис. с кружочками) можно определить очень точно.