The numerical solution of a 2-D nonlinear inverse kinematics
advertisement

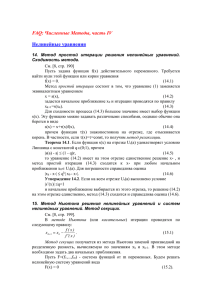
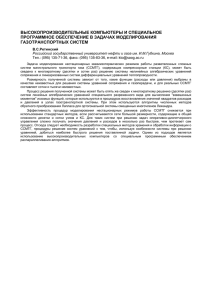
Международная конференция «Обратные и некорректные задачи математической физики», посвященная 75-летию академика М.М.Лаврентьева, 20-25 августа 2007 г., Новосибирск, Россия Численное решение двумерной нелинейной обратной кинематической задачи сейсмики для сред с гладкой функцией скорости Е. А. Хогоев ИНГГ СОРАН, пр. Ак. Коптюга, 4, 630090 Новосибирск, Россия E-mail: hogoev@uiggm.nsc.ru Решение обратной кинематической задачи сейсмики имеет как теоретическое значение, поскольку служит развитию методов решения нелинейных задач, имеющих вид интегрального уравнения первого рода, так и практическое, связанное с определением скоростного строения среды при сейсморазведке и соответственно повышением точности структурных построений. Первый результат по неодномерной обратной кинематической задаче в линеаризованной постановке был получен М.М. Лаврентьевым, В.Г. Романовым [1]. В работах [4,5] предложен численный алгоритм последовательной линеаризации задачи с включением на каждом шагу полученного решения (метод Ньютона). Рассмотрим полупространство z 0 пространства R 2 ( x, z ) , заполненное средой со скоростью распространения сейсмического импульса V ( x, z ) . Функцию V ( x, z ) предполагаем непрерывно дифференцируемой. Этому распределению скорости при каждом положении источника 0 ( xi , 0) и приемника 1 ( x j ,0) отвечает геодезическая Г(ξ 0 , ξ1 ) = Г . Введем обозначения: n 1/ V - функция медленности, и - время пробега по лучевым траекториям Г в среде с распределением медленности n . Для каждой пары источник-приемник τ(ξ 0 ,ξ 1 )= nds . Г У нас есть последовательность соотношений для M пар источник-приемник: n dγ - τ1 = 0 Г1 ........ m (1) n dγ - τ = 0 . Гm ........ n dγ - τ M = 0 M Г Здесь n( x, z ) - искомая функция медленности, Г m - зависящая от n( x, z ) геодезическая, соединяющая пару точек (ξ 0 , ξ1 ) m , τ m - известное время пробега сигнала, m = 1,...M . Переведем (1) в конечномерный вид. Разобьем область, в которой распространяются лучи, прямоугольной сеткой размером (N x , Nz ) , и для каждой пары (ξ 0 , ξ1 ) m рассчитаем лучи в среде с задаваемой нами начальной моделью медленности n0 ( x, z ) . Лучи рассчитываются методом пристрелки. В результате мы определяем Г 0m и невязку времени τ m . В сквозной нумерации ячеек сетки i 1,..N x N z длина m-го луча в i-й ячейке ami . При соблюдении условий линеаризации система уравнений (1) представляется в виде системы линейных алгебраических уравнений, в которой коэффициенты есть длина отрезков каждого луча в ячейках сетки: τ m τ 0m τ m n0 dγ - ndγ (n0 Г m 0 Г m Г m 0 - n)dγ = n dγ = i ami ni , Г0m или 1 (2) An τ . Решив эту систему уравнений, получаем уточненную модель среды n1 n n0 . Отметим, что в канонической записи [2] 0 τ , поэтому формула уточненной модели имеет вид n1 n n0 . Нетрудно видеть, что решение задачи в линеаризованной постановке есть первый шаг метода Ньютона, так как, записав (1) в виде F(n)= 0; F(n)= F(n0 )+ F (n0 )(n n0 ) ; F(n0 )= 0 ; получаем -F(n0 )= F (n0 )(n n0 ) , -F(n0 )= F (n0 )n , n n0 n , и если решение принимается за следующее приближение, то итерации ведутся по формуле -F(nk )= F (nk )n ; nk 1 nk n , где производные Фреше вычисляются интегрированием вдоль лучей [3] и в конечномерном виде представляются матрицей A. Для полученной системы (2) итерационным методом LSQR решается задача наименьших квадратов. Критерием останова итераций служит достижение минимума (min=10-4) относительного изменения решения. В работах [4,5] реализован итеративный алгоритм, в котором найденное при помощи решения (2) уточненная модель nk 1 используется для дальнейших итераций. Полученное на очередном шаге решение заменяет опорную модель для следующей линеаризации. Если на первом шаге линеаризации начальную функцию скорости мы можем выбрать виде формулы, то после решения системы уравнений (2) получаем значения скорости на сетке. Главную сложность итеративного решения представляет собой расчет лучей по сеточно заданной функции скорости. Полученное решение n сглаживается посредством медианной фильтрации и последующего усреднения в скользящем окне. При этом не столь важно сохранить в точности найденное решение, сколько обеспечить устойчивость пристрелки лучей. Так как расчет лучей производится численным интегрированием системы нелинейных дифференциальных уравнений, нам необходимо знать в каждой точке не только значение скорости, но и ее первых производных по координатам. Для того чтобы обеспечить это требование дискретно заданная скорость интерполируется двумерным полиномом Лагранжа. Расчет новых траекторий лучей в уточненной на предыдущем шаге модели среды является ключевым моментом для следующей линеаризации. В численном эксперименте [4] было установлено как повышение точности решения обратной задачи, так и увеличение отношения восстанавливаемой части скоростного распределения к его основной известной составляющей. Доказано, что при амплитуде локальной аномалии до 30% от основной известной составляющей скорости задача решается успешно за три итерации. В дальнейшем удалось показать сходимость итерационного процесса даже при величине восстанавливаемой части (положительного знака) скоростного распределения соизмеримой с его основной известной составляющей [5]. Ранее алгоритм опробовался на синтетических данных. Здесь впервые представляются результаты обработки реального материала. Пример численного решения обратной задачи по данным, полученным в полевом эксперименте. Имеется 10 годографов, 5 прямых и 5 встречных, протяженностью от 6 до 10 км. Расстояние между пунктами приема 200 м. Длина профиля 18 км. Точность измерения времени прихода волны 0.01 сек. При анализе данных определено, что в разрезе присутствует граница 1-го рода, порождающая головную волну. Выше нее залегает толща, в которой распространяющуюся волну можно попытаться аппроксимировать рефрагированной волной. В данном случае этой волне соответствуют времена прихода до 0.8 с. После такого отбора данных в итоге остается порядка 200 измерений (200 уравнений в системе (2)). Сетка восстановления в данном случае N x = 30 , N z 20 , что соответствует длине ячейки сетки по X ≈ 600 м, по Z≈100м. Уменьшение размеров ячеек сетки нецелесообразно, так как расстояние между пунктами приема 200м, а также точность снятия времени мала. При большом размере ячеек сетки происходит уменьшение влияния возможных погрешностей, связанных с недостаточно учтенным рельефом и мелкими приповерхностными скоростными неоднородностями. Оценка сходимости итеративного решения. Поскольку, в отличие от расчетов по синтетическим данным, здесь мы заранее не знаем скоростной модели среды, оценивать решение предлагается по изменению среднеквадратической нормы τ , отнесенной к точности измерения времени, в данном случае 0.01 сек. На рисунке 1 представлено изменение скоростной модели среды, начиная от начального приближения, выбранного по априорным данным V0 ( x, z ) =1.7+0.6z, на пяти итерациях. По горизонтальной 2 оси – координаты профиля, в метрах, по вертикальной – глубина в метрах. Скорость в м/c, шкала приведена внизу рисунка. Начальное приближение Итерация 1 Итерация 2 Итерация 3 Итерация 4 Итерация 5 Шкала скорости, в м/с 2600 2500 2400 2300 2200 2100 2000 1900 1800 1700 0 Рис. 1. Изменение восстанавливаемой скоростной модели среду на пяти итерациях. 14 12 12 10 10 8 8 K dK 14 6 6 4 4 2 2 0 0 1 2 3 4 5 1 2 3 итерации итерации а) б) Рис. 2. а) Изменение среднеквадратической нормы K= 4 5 τ / T , T -точность измерения времени вступления волны; б) Приращение K с каждой итерацией. 3 Заключение Метод итераций Ньютона благодаря регуляризации промежуточного решения является устойчивым и может быть применен для обработки экспериментальных данных. Горизонтальная неоднородность диагностируется устойчиво. При этом необходимо тщательно подходить к предварительному отбору входных данных (отбрасывая времена головной волны), для того чтобы поиск решения происходил в классе сред с гладкой функцией скорости. Невязка решения на пяти итерациях остается значительной. Вероятная причина относительно большой невязки решения заключается в неувязанных во взаимных точках годографах. Кроме того, нельзя не учитывать, что невязки времени рассчитываются при трассировании луча по сглаженной модели среды, основой для которой является решение, представленное на рисунках выше. Поэтому только по невязке судить о точности решения не совсем верно. Тем не менее, с третьей итерации изменение среднеквадратической ошибки становится соизмеримой с точностью измерения времени прихода волны. Список литературы 1. Лаврентьев М.М., Романов В.Г. О трех линеаризированных обратных задачах для уравнений гиперболического типа. // Докл. АН СССР, 1966, т.171, №6, с 1279-1281 2. Лаврентьев М.М., Романов В.Г., Шишатский С.П. Некорректные задачи математической физики и анализа. // М, Наука, 1980, 286 с. 3. Cherveny V. Seismic ray theory// Cambridge University Press, 2001 4. Зеркаль С.М., Хогоев Е.А. Итерационная технология сейсмотомографической диагностики на основе кинематики рефрагированных волн// Доклады РАН, № 4 (401), 2005 , с 526-528 5. Хогоев Е.А. Диагностика скоростных неоднородностей по кинематике рефрагированных волн// Материалы 2-го междунар. cимп. Активный геофизический мониторинг литосферы Земли, Новосибирск, 12-16 сент. 2005 г. C 272 -276 4