Шпоры_2_с_оглавлением
advertisement

Оглавление
1.
Классификация параллельных КС по структурно-функциональным признакам ............................... 3
2. Классификация параллельных КС по функциональным возможностям КС с точки зрения
пользователя. ................................................................................................................................................... 5
- Мультикомпьютер совокупность объединенных сетью отдельных вычислительных модулей,
каждый из которых управляется своей операционной системой (ОС). Пример серия SP фирмы IBM.
........................................................................................................................................................................... 5
- кластеры - набор компьютеров, рассматриваемый ОС, системным программным обеспечением,
программными приложениями и пользователями как единая система. .................................................. 5
- SMP - состоят из нескольких десятков процессоров, разделяющих общую основную (оперативную)
память и объединенных коммуникационной системой .............................................................................. 5
- массово-параллельн. Системы - В этих КС узлы обычно состоят из одного или нескольких
процессоров, локальной памяти и нескольких устройств ввода/вывода. Чаще всего в МРР-системах
реализуется архитектура без разделе¬ния ресурсов. В каждом узле работает своя копия ОС, а узлы
объединя¬ются специализированной коммуникационной средой. .......................................................... 5
- сист. С распред. Раздел. Памятью - Общим является наличие, помимо кэша, локальной памяти в
каждом процессорном узле. Узел может состоять из нескольких процессоров и иметь архитектуру
SMP. Поддерживается общее адресное пространство памяти. Однако при этом память является
распределенной по узлам, и время доступа зависит от места расположения данных. Поэтому
некоторые DSM-системы получили название NUMA (Non-Uniform Memory Access), что означает
неоднородный доступ к памяти. .................................................................................................................... 5
3. Проведите сравнительный анализ классификаций компьютерных систем. ......................................... 5
4. Мультикомпьютеры, кластеры и симметричные мультипроцессоры общая характеристика,
схемы построения, особенности каждой из систем, области применения. ............................................. 6
Наиболее эффективной областью применения кластеров являются хорошо структурируемые, как
правило, научные приложения. ..................................................................................................................... 7
5. Системы с распределенной и разделяемой памятью, массово-параллельные системы общая
характеристика, схема построения, особенности каждой из систем, области применения. ................. 8
6.
Структура, достоинства и недостатки UMA-, NUMA- и ccNUMA-систем............................................. 9
7. Архитектуры S2MP и NUMAflex как развитие архитектуры ccNUMA .................................................... 10
8. Основные понятия теории моделирования параллельных КС. Методы моделирования
параллельных КС............................................................................................................................................ 11
9. Задачи моделирования параллельных КС ............................................................................................. 11
10. Приведите основные принципы моделирования. ............................................................................... 12
11. Моделирование параллельных процессов. Применение аппарата сетей Петри. Подклассы и
расширения сетей Петри. .............................................................................................................................. 13
12. Применение сетей Петри для синтеза дискретных управляющих устройств. .............................. 15
13. Оценочные или E-сети как расширение сети Петри ............................................................................. 16
14. Моделирование конвейерной обработки информации. .................................................................... 18
15. Задачи сохранения и активности сети Петри ........................................................................................ 19
17. Задача безопасности и ограниченности сети Петри............................................................................. 23
18. Использование сетей Петри для количественных оценок функционирования параллельных КС .. 25
19. Моделирование сетями Петри задач синхронизации при взаимодействии процессов в КС .......... 26
20. Задача активности сетей Петри .............................................................................................................. 27
21. Анализ сетей Петри матричным методом............................................................................................. 29
22. Матричный метод анализа сетей Петри- достоинства и недостатки метода. ................................... 31
23. Задача достижимости сетей Петри ........................................................................................................ 31
24.
Границы возможностей моделирования с помощью сетей Петри. .............................................. 33
26.
Маркированные графы – подкласс сетей Петри.............................................................................. 35
27.
Сети Петри и их особенности. ............................................................................................................ 37
32. Разбиение чисел. Основные понятия и определения. Принцип Дирихле. ........................................ 39
35. Принцип полного размещения ............................................................................................................... 43
44. Абсолютно однородная сеть (определение, примеры). ...................................................................... 51
45. Какую сеть можно назвать уницентральной ......................................................................................... 51
46+47. Построить двухкаскадный коммутатор КС ...................................................................................... 52
48. Понятие о сложности сети КС ................................................................................................................. 54
51. Диаметр и средний диаметр [n,m]-сети ................................................................................................ 56
52+53. Надежность сети КС ........................................................................................................................... 57
54. Отказоустойчивость (живучесть) топологической структуры КС ......................................................... 59
55. Связь стоимостных характеристик и топологии КС .............................................................................. 60
56. Приведите общее выражение для переключающей матрицы ........................................................... 61
58. Дайте определение реберного графа и постройте граф L(G), если граф G имеет вид: .................... 62
x1
x4
x2
x6
x5
x3
................................................................................................................... 62
59. Приведите определение и приведите особенности параллельных КС с магистральными связями.
......................................................................................................................................................................... 62
60. Приведите математическое описание магистрально-модульной КС................................................. 63
61. Структура магистрально-модульных КС; особенности построения структур магистральных КС и их
отличие от других типов структур компьютерных сетей? .......................................................................... 64
1.
Классификация параллельных КС по структурно-функциональным признакам
Так, на основе классификации Флинна различаются следующие параллельные архитектуры: SIMD, MIMD, MISD и MSIMD. Кроме этого, особо выделяются векторные и
конвейерные системы, которые часто относят к подклассам SIMD (MSIMD) или MISD. (К
параллельным масштабируемым системам можн отнес мультикомп-ы, выч-е
кластеры, симметр. мультипроцы с общ памятью (SMP symmetrical multiprocessing),
системы с распред разделяемой памятью (DSM distributed shared memory) и массовопараллельные системы (МРР massively parallel processing). Подобное деление
основывается на проявлении функциональных возможностей КС с точки зрения
конечного пользователя и ни в коей мере не претендует на классификацию по
структурно-функциональным
признакам.
Некоторые
авторы
подразделяют
масштабируемые параллельные системы на МРР, SMP, ccNUMA, кластеры и
распределенные системы.) Иногда к современным MIMD-архитектурам причисляют
МРР-, SMP-системы и кластеры, причем кластеры и МРР-системы в основном
различаются по степени согласованности набора прикладных программ и
характеристикам коммуникационных сред.
Нужно сказать, что систематизация Флинна, а также позднее появившиеся
классификации Хокни, Фенга, Хендлера, Шнайдера и Скилликорна не делают
различий в организации распределенных вычислений с учетом взаимодействия
процессов. Общим свойством, обеспечивающим возможность повышения
производительности масштабируемых систем, как раз и является распределенность
процессов вычислений и данных. Это свойство характерно и для SMP-архитектур, если
принять во внимание типичную иерархию «кэш процессора основная память
подсистема ввода/вывода».
Классификация Флинна базируется на понятии потока, под которым понимается
последовательность команд или данных, обрабатываемых процессором. На основе
числа потоков команд и потоков данных Флинн выделяет четыре класса архитектур:
SISD, SIMD, MISD, MIMD.
P. Хокни (переключаемые (с общ. Пам-ю, с раздел. Пам.), конвейерные,
сети(регулярн. Решетки, гиперкубы, иерархич. Структ-ы, изменяющ-ся конфиг-я).
В 1972 году Т. Фенг предложил классифицировать КС на основе двух простых
характеристик. Первая число n бит в машинном слове, обрабатываемых параллельно при выполнении машинных инструкций (практически во всех современных
компьютерах это число совпадает с длиной машинного слова). Вторая характеристика
равна числу слов m , обрабатываемых одновременно данной ВС. Тогда
функционирование любого компьютера можно представить как параллельную
обработку n битовых слоев, на каждом из которых независимо преобразуются m бит.
Опираясь на такую интерпретацию, вторую характеристику называют шириной
битового слоя.
Каждую КС С описать парой чисел n, m . Произведение P n m определяет
интегральную характеристику потенциала параллельности архитектуры, которую Фенг
назвал максимальной степенью параллелизма ВС.
В основу классификации В. Хендлер закладывает явное описание возможностей
параллельной и конвейерной обработки информации КС. При этом он намеренно не
рассматривает различные способы связи между процессорами и блоками памяти, а
считает, что коммуникационная сеть может быть нужным образом сконфигурирована
и будет способна выдержать предполагаемую нагрузку.
Предложенная классификация базируется на различии между тремя уровнями
обработки данных в процессе выполнения программ:
□ уровень выполнения программы; опираясь на счетчик команд и некоторые другие
регистры, устройство управления (УУ) производит выборку и дешифрацию команд
программы;
□ уровень выполнения команд; арифметико-логическое устройство компьютера
(АЛУ) исполняет команду, выданную ему устройством управления;
□ уровень битовой обработки; все элементарные логические схемы процессора
(ЭЛС) разбиваются на группы, необходимые для выполнения операций над одним
двоичным разрядом.
В 1988 году Л. Шнайдер предложил выделить этапы выборки и непосредственно
исполнения в потоках команд и данных. Именно разделение потоков на адреса и их
содержимое позволило описать такие ранее «неудобные» для классификации
архитектуры, как компьютеры с длинным командным словом, систолические массивы
и целый ряд других.
В 1989 году была сделана очередная попытка расширить классификацию Флинна и
тем самым преодолеть ее недостатки. Д. Скилликорн разработал подход, пригодный
для описания свойств многопроцессорных систем и некоторых нетрадиционных
архитектур, в частности, dataflow.
Предлагается рассматривать архитектуру любого компьютера, как абстрактную
структуру, состоящую из четырех компонентов:
□ процессор команд (IP Instruction Processor) функциональное устройство,
работающее как интерпретатор команд; в системе, вообще говоря, может
отсутствовать;
□ процессор данных (DP Data Processor) функциональное устройство,
работающее как преобразователь данных в соответствии с арифметическими
операциями;
□ иерархия памяти (IM Instruction Memory, DM Data Memory) запоминающее
устройство, в котором хранятся данные и команды, пересылаемые между
процессорами;
□ переключатель абстрактное устройство, обеспечивающее связь между
процессорами и памятью.
2. Классификация параллельных КС по функциональным возможностям КС с точки
зрения пользователя.
- Мультикомпьютер совокупность объединенных сетью отдельных вычислительных
модулей, каждый из которых управляется своей операционной системой (ОС). Пример
серия SP фирмы IBM.
- кластеры - набор компьютеров, рассматриваемый ОС, системным программным
обеспечением, программными приложениями и пользователями как единая система.
- SMP - состоят из нескольких десятков процессоров, разделяющих общую основную
(оперативную) память и объединенных коммуникационной системой
- массово-параллельн. Системы - В этих КС узлы обычно состоят из одного или
нескольких процессоров, локальной памяти и нескольких устройств ввода/вывода.
Чаще всего в МРР-системах реализуется архитектура без разделе¬ния ресурсов. В
каждом узле работает своя копия ОС, а узлы объединя¬ются специализированной
коммуникационной средой.
- сист. С распред. Раздел. Памятью - Общим является наличие, помимо кэша,
локальной памяти в каждом процессорном узле. Узел может состоять из нескольких
процессоров и иметь архитектуру SMP. Поддерживается общее адресное
пространство памяти. Однако при этом память является распределенной по узлам, и
время доступа зависит от места расположения данных. Поэтому некоторые DSMсистемы получили название NUMA (Non-Uniform Memory Access), что означает
неоднородный доступ к памяти.
3. Проведите сравнительный анализ классификаций компьютерных систем.
Классификация по Флину по потоку данных:
SISD,SIMD, MISD, Multiply SIMD
Особо выделяются векторные и конвейерные системы, которые относятся к классу
MISD (MSIMD)
Классификация Хокни – детальная систематизация класса MIMD. Множественный
поток может быть обработан двумя способами: либо одним конвейерным
устройством с разделением по времени, либо на каждый поток – своим устройством.
Классификация Фенга. 1 – число бит n в машинном слове. (число бит, обрабатываемое
параллельно). 2 – число слов m, обрабатываемых параллельно.
n и m = 1 разрядно последовательная
n > 1 m = 1 пословно последовательная
n = 1 m > 1 последовательно поразрядная
n > 1 m > 1 параллельно пословная
Классификация Хендлера – базируется на различии 3х уровней обработки данных.
1.
Уровень выполнения программы
2.
Уровень выполнения команд.
3.
Уровень битовой обработки
Классификация Шнайдера – предложено выделить этапы выборки и исполнения
потока команд и данных
Классификация Скилли-Корна – предложено рассмотреть архитектуру, как
абстрактную структуру, состоящую из 4х элементов: процессор команд, процессор
данных, иерархия памяти(зу команд и данных), переключатель (обеспечивает связь
процессоров с памятью)
+ вопрос 1
4. Мультикомпьютеры, кластеры и симметричные мультипроцессоры общая
характеристика, схемы построения, особенности каждой из систем, области
применения.
МПК – совокупность объединенных вычислительной сетью отдельных модулей,
каждый из которых управляется своей ОС
Кластеры – набор модулей, рассматриваемый ос как единая система. Хорошо
масштабируется и имеет высокую степень отказоустойчивости.
Симметричные мультипроцессоры(SMP) – состоит из нескольких десятков
процессоров и объединена коммуникационной системой.
+ вопрос 2
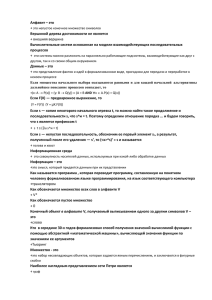
Разумеется, передача данных между кэшами разных процессоров в SPM-системах
выполняется значительно быстрее, чем обмен данными между узлами кластера или
мультикомпьютера. Поэтому SMP-архитектуры хорошо масштабируются с целью
увеличения производительности при обработке большого числа коротких транзакций,
свойственных банковским приложениям. Что же касается удобства масштабирования
и уровня готовности, то SMP-системы уступают кластерам.
...
Процессор 1
Кэш
Процессор N
Кэш
Коммуникации
Основная
память
Подсистема
вв/выв
Диски
Рис. 1.8. Структура SMP-системы
Кластеры:
Коммуникации
Коммуникации
Узлы
кластера
Узлы
кластера
Диск
Диск
а
Диск
Диск
Диск
Диск
б
Рис. 1.7. Кластеры с разделяемыми дисками (а) и без разделения ресурсов (б)
Наиболее эффективной областью применения кластеров являются хорошо
структурируемые, как правило, научные приложения.
5. Системы с распределенной и разделяемой памятью, массово-параллельные
системы общая характеристика, схема построения, особенности каждой из
систем, области применения.
Системы с распределенной и разделяемой памятью (DSM) могут быть реализованы
различными способами:
Узел 1
Процессор
Процессор
Узел N
...
Процессор
...
Кэш
...
Кэш
Справочник
Подсистема
вв/выв
Процессор
Память
Кэш
Кэш
Память
Подсистема
вв/выв
Справочник
Коммуникации
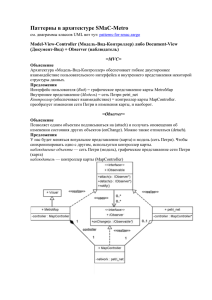
Рис. 1.9. Структура ccNUMA-системы
Кажд выч-й узел может состоять из неск процов, может иметь структуру SMP.
Поддерж-ся общ прост-во памяти, адресн прост-во распределено по узлам, а доступ
зависит от удален-ти узла, по этому некот сист-ы получили назв-е NUMA систем (nonuniform memory access). Один из способов реал-ии – отказ от соглас-х кешей.
массово-параллельн системы (MPP) – узлы сост из неск процов, лок-й памяти, I/O устра. Чаще всего строится без раздел-я рес-в. В кажд узле своя ОС а узлы связ коммуник-й
средой. Не треб аппар обеспечения когерентности, т.к. в каждом узле своя ос со своим
адресным пространством, а обмен инфой между узлами происходит с помощью
сообщений. Классификация MPP еще не устоялась.
Общими особенностями MPP и DSM является распределитель данных и
распределитель процесса обработки. В распределении заложена возможность
масштабирования, но с другой стороны интенсивный обмен данными сильно
загружает коммуникационные среды, чем сильно ограничивает возможности
параллельных КС, следовательно эффективность выполнения сильно зависит от
организации взаимодействия распределенных процессов
6. Структура, достоинства и недостатки UMA-, NUMA- и ccNUMA-систем
Достаточ объем кэша и сравнит. небольш кол-во процов в SPM-сист-х позв-т
удовл-ь обращ-я к осн памяти, поступ-е от неск-х процов, так чт время доступа к общ
памяти примерно одинак для всех процов. Это объясняет еще одно назв-е таких архитр UMA (Uniform Memory Access)-однород доступ к пам.
Процессор-е узлы NUMA систем объед-ся сетью, в узлах кот размещ-ся спец
контроллеры, кот анализ-т адрес обращ-я к памяти. Если данные размещ-ся в памяти
удаленного узла, то его контроллеру посылается сообщение об обращении к этим
данным. Один из способов реализации NUMA-архитектур отказ от аппаратных
средств поддержки когерентности кэшей. По сравнению с SMP, программирование
NUMA сложнее.
Альтернативные способы обеспечения согласованности данных кеш-памяти всех
узлов (CCNUMA – cache coherent NUMA). В ccNUMA механизм работы кэш каждого
узла связан с доступом к локальной памяти удаленного узла. Одна из первых
реализаций - NUMA-Q. Состояние кэш отслеживается с помощью протокола на основе
справочника.
Узел 1
Процессор
Процессор
Узел N
...
Процессор
...
Кэш
...
Кэш
Справочник
Подсистема
вв/выв
Процессор
Память
Кэш
Кэш
Память
Подсистема
вв/выв
Справочник
Коммуникации
Справ-к распред-н по узлам сист-ы и хранит сост-е кажд блока данных, кот может
заносится в кэш. В справ-ке инфа о том, в каких кэш имеется копия блока, свед-я по
модиф-ии данных. Простота реализ-и оборач-я размерами справ-ка, пропорц-и не
кэш, а общ памяти. В соврем сист-х узлов не больше 64.
7. Архитектуры S2MP и NUMAflex как развитие архитектуры ccNUMA
S2MP(scalable shared MP) – развитее NUMA архитектуры, преодолевающее
ограничение на масштабируемость. Сдерживает рост узлов.
Узел
Узел
Маршрутизатор
Сеть
Сеть межсоединений
Маршрутизатор
Узел
Узел
Важная часть каждого узла – концентратор. По сути – это свич с 4 двунаправленными
портами. Эти порты связывают КМ с процессорами, оперативной памятью,
справочником и маршрутизаторами. Поддержание кэш – справочник. Применение
программируемых КМ позволит реализовать систему с различными топологиями.
NUMAflex. Наследует черты S2MP. Более высокая готовность обеспечивается в
технологии т.н. разделения. Каждый раздел представляет собой независимый сервер
для связи с другими узлами используется архитектура межсоединеий.
Процессор
Теги
Притягивающая
память
Справочник
Кэш
Коммуникации
В каждом разделе может работать своя версия ос. Спец. аппаратные средства
позволяют изолировать ошибку, не позволяя ей распространятся.
8. Основные понятия теории моделирования параллельных КС. Методы
моделирования параллельных КС
Моделирование это замещение исследуемого объекта (оригинала) его условным
образом или другим объектом (моделью) и изучение свойств оригинала путем исследования свойств модели.
модель обеспечивает корректное (или, как говорят, адекватное) отображение
свойств оригинала, существенных с точки зрения исследуемой операции;
модель позволяет устранить проблемы, присущие проведению измерений на
реальных объектах.
В зависимости от способа реализации, все модели можно разделить на два
больших класса; физические и математические.
Физические модели предполагают, как правило, реальное воплощение физических
свойств оригинала. Например, при проектировании нового самолета создается его
макет, обладающий теми же аэродинамическими свойствами; ...
Математическая модель представляет собой формализованное описание системы
(или операции) на некотором абстрактном языке, например в виде совокупности
математических соотношений или схемы алгоритма. По большому счету, любое
математическое выражение, в котором фигурируют физические величины, можно
рассматривать как математическую модель того или иного процесса или явления.
9. Задачи моделирования параллельных КС
При разработке конкретной модели цель моделирования должна уточняться с
учетом используемого критерия эффективности. Для критерия пригодности модель,
как правило, должна обеспечивать расчет значений показателя эффективности (ПЭ)
для всего множества допустимых стратегий (показатель эффективности позволяет
оценить и сравнить (по тем или иным правилам) результат операции, полученный при
использовании каждой конкретной стратегии). При использовании критерия
оптимальности модель должна позволять непосредственно определять параметры
исследуемого объекта, дающие экстремальное значение ПЭ.
Таким образом, цель моделирования определяется как целью исследуемой операции, так и планируемым способом использования результатов исследования.
Например, проблемная ситуация, требующая принятия решения, формулируется
следующим образом: найти вариант построения КС, который обладал бы
минимальной стоимостью при соблюдении требований по производительности и по
отказоустойчивости. В этом случае целью моделирования является отыскание
параметров КС, обеспечивающих минимальное значение ПЭ, в роли которого
выступает стоимость.
Задача может быть сформулирована иначе: из нескольких вариантов конфигурации
КС выбрать наиболее отказоустойчивый. Здесь в качестве ПЭ выбирается один из
показателей отказоустойчивости, а целью моделирования является сравнительная
оценка вариантов КС по этому показателю.
10. Приведите основные принципы моделирования.
1. принцип информационной достаточности. При полном отсутствии инфы об
исследуемой системе, постоение системы невозможно. Существует некий
критический уровень сведений о системе, при достижении которого возможно
построение системы.
2. принцип осуществимости. Созданная модель должна обеспечивать достижение
поставленной цели за конечное время. Обычно задают некоторое пороговое значение
P0 – вероятность достижения цели моделирования и приемлемое значение времени t0
модель считается осуществимой если P0(t0) ≥ P(t).
3. принцип множественности модели. Является главным. Создаваемая модель должна
отражать в 1ю очередь те свойства системы, которые влияют на выбранный
показатель эффективности. Соответственно при использовании любой конкретной
модели познаются лишь некоторые стороны реальности. Для более полного ее
исследования необходим ряд моделей, позволяющих с разных сторон и с разной
степенью детальности отражать рассматриваемый процесс.
4. принцип агрегирования. В большинстве случаев сложную систему можно
представить состоящей из агрегатов (подсистем), для адекватного математического
описания которых оказываются пригодными некоторые стандартные математические
схемы. Принцип агрегирования позволяет, кроме того, достаточно гибко
перестраивать модель в зависимости от задач исследования.
5. принцип параметризации. В ряде случаев система имеет подсистемы,
характеризующие отдельным параметром. Такие подсистемы можно заменять в
модели соответствующими числовыми величинами. Они описывают процесс их
функционирования в схеме. При необходимости зависимость значений этих величин
от ситуации может задаваться в виде таблиц, графиков или аналитических формул.
Этот принцип позволяет сократить объем и продолжительность моделирования, но
снижает адекватность модели.
11. Моделирование параллельных процессов. Применение аппарата сетей Петри.
Подклассы и расширения сетей Петри.
Сети Петри – инструмент исследования систем, в том числе параллельных. Теория
сетей Петри делает возможным моделирование системы математическим
представлением ее в виде сети Петри. Анализ сетей Петри помогает получить важную
информацию о структуре, динамическом поведении моделируемой системы.
Применяются сети Петри исключительно в моделировании. Сети Петри
разрабатываются специально для моделирования тех систем, которые содержат
взаимодействующие параллельные компоненты, программы, устройства.
Для иллюстрации понятий теории сетей Петри гораздо более удобно графическое
представление сетей Петри. Теоретико-графовым представлением сети Петри
является двудольный ориентированный граф. Структура сети Петри представляет из
себя совокупность позиций и переходов. В соответствии с этим граф сети Петри
обладает двумя типами узлов:
1. Кружок является позицией
2. Планка обозначает переходы.
Граф G сети Петри есть двудольный ориентированный мультиграф G = (V ,A), где V =
(u1, u2, .., un) – множество вершин, А = (а1, а2, .., аr) – комплект направленных дуг.
ai = {vj, vk}, где vj, vk V. V может быть разбито на два непересекающихся
подмножества P и Т(позиции и переходы), таких что V = Р Т, P∩T=0.
Выполнение сети Петри управляет количество и распределение фишек в сети. Фишки
находятся в позициях (кружочках) и управляют выполнением перехода сети. Сеть
Петри выполняется посредством запусков перехода, который в свою очередь
запускается удалением фишек из его входных позиций и образованием новых фишек,
помещаемых в его выходные позиции. Переход может запускаться только в том
случае, когда он разрешен. Переход называется разрешенным, если каждая из его
входных позиций имеет число фишек, по крайней мере, равное числу дуг из позиции в
переход. Кратные фишки необходимы для кратных дуг. Фишки о входной позиции,
которые разрешают переход, называются разрешающими фишками.
Подкласс
Автоматные сети – с одной входной и одной выходной дугой у каждого перехода.
Ограничение на число входных и входных переходов – признак выделения подкласса
маркированных графов.
Устойчивые сети – для этой сети при любой допустмой маркировки, два любых
перехода ti и tk оказываются возбужденными, то срабатывание одного из них не
исключает срабатывания другого.
Сети свободные от конфликта. Если Pi I(tj) то Pi O(tj), иначе Pi должна иметь ≤ 1
выходной переход.
Если на сеть петри накладывается ограничение: каждая выходная дуга от позиции
либо ее единственным выходом, либо его единственным входом, то это сети
свободного выбора
Условием выделения чистых сетей петри – переход не может иметь позицию Pi в
качестве входной и выходной.
Регулярные сети – ввдена алгебра регулярных сетей. Строится операции над сетями –
операции над сетями(слияние) и класса элементарных сетей. Бред какой-то…
Линейные сети – можно представить сеть в линейной форме записи, но при
регуляризации вводится избыточность.
Простые сети – наличее перехода не более одной входной позиции имеющей больше
1 выхода
В теории сетей педри предложено несколько расширений, ориентированных на
расширение возможностей.
Обощенные сети – граф сети – мультиграф.
Раскрашенные сети – раскрашиваются метки в позициях.
Приоритетные сети – позволяют учитывать в модели приоритеты. Вводится доп.
Множество I прямых инцендентных дуг запрета. Для срабатывания некого перехода t с
проверкой на приоритет требуется отсутствие меток меток во всех входных позициях
запрета.
Е-Сети (дальше)
Временные сети
Сети Мерлина
12. Применение сетей Петри для синтеза дискретных управляющих устройств.
Среди достоинств аппарата сетей Петри можно указать следующие:
сети Петри позв-т модел-ть асинхр-ть и недетерминизм парал-х независимых
событий, параллелизм конвейерного типа, конфликтные взаимодействия между
процессами;
как мат. модель сети Петри занимают промежуточное положение между
конечными автоматами и машинами Тьюринга. При этом по выразительной мощности
они значит богаче автоматов и приближ-ся к машинам Тьюринга;
сети Петри включают возможности ряда других моделей, предложенных для
параллельных систем (семафоры Дийкстры, сист-ы векторн слож-я и векторного
замещения, вычислительные схемы, модели повторно используемых, ресурсов и др.),
позв-я опис-ть как типовые ситуации в данных сист-х (распред-е ресур-в, взаимн.
блокировки), так и общ динамику работы сложн асинх-й системы;
стремление расширить применимость аппарата сетей Петри привело к появлению
ряда классов сетей, ориентированных на моделирование сложных систем с учетом
таких факторов, как приоритетность процессов (сети с проверкой на нуль,
приоритетные сети), временные параметры событий (сети Мерлина, временные сети),
совместного отображения структуры управления и потоков данных (Е-сети);
в отличие от моделей параллельных программ (таких, как А-программы, схемы
Карпа-Миллера и др.) сети Петри допускают произвольную интерпретацию элементов
модели как в смысле типа выполняемого фрагмента (выражения, операторы,
подпрограммы, аппаратные функциональные преобразования информации), так и по
уровню абстракции. Таким образом, сети Петри позволяют производить
иерархическую детализацию программных и аппаратных подсистем модели.
13. Оценочные или E-сети как расширение сети Петри
Е-сеть задается:
CE=(P,PP,PR,T,M0)
P – мн-во позиций
PP – мн-во приобретенных позиций
PR – мн-во решающих позиций
T – мн-во переходов
Причем Ti = (ρS,t(ti)) S – тип перехода, t(ti) – время перехода, ρ(ti) – процедуры
перехода
В Е-сетях метки интерпретируются как транзакты, а вершины и переходы, как
устройства, обрабатывающие транзакты. Требование Е-сети – ни одна вершина не
может содержать более одной метки.
фишки (метки) могут снабжаться набором признаков (атрибутов);
В отличие от сетей петри в Е-сетях имеется несколько Е-позиций: простые
позиции, позиции очереди, разрешающие позиции,
срабатывание перехода идет при
наличее фишки в P1 и отсуствии в Р2. Позволяет
отразить занятость некоторого устройства.
отображает
разветвление потока транзактов в ВС. Данный
переход может быть в форме макроперехода.
Объединение.
необходимо наличее двух
фишек и отсуствие фишек в выходной позиции.
Управляемое разветвление Pi – управляющий:
Ye – приоритетнось одних потоков другим:
Важной особенностью Е-сети является детализация представления метки. С каждой
меткой kl в Е-сети связаны n описателей, что записывается как kl[n]. Значение i-го
описателя в позиции bk обозначается как M(bk(i)). Каждый из описателей метки несет в
себе определенную количественную информацию о моделируемом объекте.
14. Моделирование конвейерной обработки информации.
ЦЭВМ с конвейерной обработкой.
Возможность моделирования сетями Петри параллелизма и
довольно простого объединения подсистем делает сети Петри
очень удобным полезным инструментом моделирования сложной
аппаратуры ВС.
Координацию различных блоков, участвующих в операции
сложения можно осуществить несколькими способами. Часто
управление конвейерной обработкой является синхронным. Таким
образом, для данной конвейерной обработки необходимо
знать когда выполняются след условия:
1. Входной регистр заполнен.
2. Входной регистр пуст.
3. Выходной регистр заполнен.
4. Выходной регистр пуст.
5. Блок занят.
6. Блок свободен.
7. Пересылка осуществлена.
1. Выходной регистр блока К-1.
2. Входной регистр блока К.
3. Выходной регистр блока К.
4. Входной регистр блока К+1.
Сеть ВС, которая обрабатывает задания,
поступающие с устройства ввода, и выводит
результат на устройство вывода.
t1 – задание помещается во входную очередь,
P1 – задание ждет, t2 – начало выполнения
задания, Р2 – процессор свободен, Р3 –
задание обрабатывается, t3 – завершение
выполнения задания, Р4 –задача ожидает
вывода, t5 - задание выводится.
15. Задачи сохранения и активности сети Петри
Сети Петри наиболее сильны там где есть параллельность.
Сохранение
Сети Петри можно использовать для моделирования систем, распределения ресурсов.
В этих системах некоторые фишки могут представлять ресурсы. Для сетей Петри такого
типа, помимо прочих, важным свойством является сохранение. Фишки,
представляющие ресурсы никогда не создаются и никогда не уничтожаются.
Простейший способ, потребовать чтобы количество фишек в сети оставалось
постоянным.
Сеть Петри C P, T , I , O с начальной маркировкой μ называется строго
сохраняющей если для всех
, R(C , ) , ( Pi )
Pi P
Pi P
( Pi ) , где нули
проставляются по всем позициям. Строгое сохранение – очень сильное ограничение.
Из него следует, что число входов в переход должно быть равно числу выходов, а
иначе запуск перехода изменил бы количество фишек в сети.
С появлением Красных переходов сеть стала
строго сохраняющей.
Все функции в позиции неразличимы,
следовательно, веса связываются с каждой
W=(1,1,2,2,1)
позицией сети. Вектор взвешивания
W=(W1,W2, …., Wn)
Определяет вес Wi для каждой позиции Pi P
Опр: Сеть Петри C P, T , I , O с маркировкой
μ
называется сохраняющей по отношению к
вектору взвешивания W=(W1,W2, …., Wn), где
.
.
.
n P , Wi 0 , если для всех , R(C , )
W ( P ) W
,
i
i
i
i
( Pi ) Строго сохраняющая
i
сеть Петри является сохраняющей по отношению к вектору взвешивания (1,1, … , 1).
Все сети Петри являются сохр. по отношению к вектору (0,0, .. ,0)/ Так как нам бы
хотелось определить сеть Петри как сохраняющую, если она является сохраняющей к
некоторому вектору взвешивания. Однако так как любая сеть Петри является
сохраняющей по отношению к 0, то такое определение не удовлетворительно. Сеть
Петри называется сохраняющей, если она является к некоторому положительному
вектору взвешивания W>0.
Активность.
Причиной рассмотрения сохранения было распределение ресурсов в ВС. Другая
задача, которая может возникнуть при распределении ресурсов в ВС – тупики. Тупики
служат предметом многих исследований.
Прим: Рассмотрим систему, включающую 2 различных ресурса q и r, и два процесса a
и b. Если оба процесса нуждаются в обоих ресурсах, им необходимо будет совместно
использовать эти ресурсы. Для выполнения этого потребуем, чтобы каждый процесс
запрашивал ресурс, а затем освобождал его. Пусть а запрашивает q, затем r и
освобождает q, потом r. А b запрашивает сначала r, затем q и освобождает сначала r,
затем q.
Начальная маркировка, помечаем ресурсы q(Р4) и r(P5), о чем свидетельствуют
фишки, и указывают на готовность a и b. Одним выполнением этой сети является
t1,t2,t3,t4,t5,t6, другим – t4,t5,t6,t1,t2,t3. Не одно из этих выполнений не приводит к
тупику. Но если рассмотреть последовательность, которая начинается переходами
t1,t4, а это означает, что процесс, а обладает q и хочет заполучить r, а b обладает r и
хочет заполучить q, то в этом случае система заблокирована, и не один процесс
продолжаться не может.
Тупик сети Петри- это переход(множество переходов), который не может быть
запущен. В сети на рис. Тупик возникает, если нельзя запустить t2 и t5. Переход
называется активным если он не заблокирован(не тупиковый). Но это не означает, что
переход разрешен. Переход tj сети Петри С называется потенциально запустимым в μ,
,
если R(C , ) , в которой t1 разрешен. Переход активен в μ если потенциально
запустим во всякой маркировке из R(C, μ). Следовательно, если переход активен, то
всегда можно перевести сети Петри из текущей маркировки в маркировку, в которой
запуск перехода станет разрешенным. При изучении тупиков существует понятие,
связанное с активностью. Их можно разбить на категории по уровню активности и
определить для сети Петри с μ следующим образом:
Уровень 0: переход tj обладает актив уровня 0, если он никогда не может быть
запущен
Уровень 1: - - - -1, если он потенциально запустим, то есть если существует такая
, R(C, ) , что tj разрешен в μ,
Уровень 2: - - - - 2, если для всякого целого n существует последовательность запусков,
в которой переход tj присутствует по крайней мере n раз.
Уровень 3: переход tj обладает активностью уровня 3, если существует бесконечная
последовательность запуска, в которой tj присутствует неограниченное количество раз
,
Уровень 4: переход tj обладает активностью уровня 4, если для всякой R(C, )
существует такая последовательность запуска g, что tj разрешен δ(μ,, g)
Переход, обладающий активностью ноль, называется пассивным. Переход,
обладающий активностью уровня 4, называется активным. Сеть Петри обладает
активностью уровня i, если каждый ее переход обладает активностью уровня i.
t3
t2
t1
t0
В качестве примера, иллюстрирующего уровни активности, рассмотрим сеть Петри
представленную на рисунке. Переход t0 не может быть запущен никогда. Он пассивен.
Переход t1 можно запустить точно один раз. Он обладает активностью уровня 1.
Переход t2 может быть запущен произвольное число раз, но это число зависит от
числа запусков перехода t3. Однако как только запуститься t1, а он должен быть
запущен до того, как будет запущен t2, число возможных запусков t2 станет
фиксированным. Следовательно, t2 обладает активностью уровня 2, но не уровня 3. С
другой стороны переход t3 можно запускать бесконечное число раз и потому он
обладает активностью уровня 3, но не уровня 4, поскольку как только запустится
переход t1, t3 больше запустить будет нельзя.
16. Задача Достижимости и покрываемости сети Петри.
Поскольку задачи подмножества и равенства для множеств достижимости сетей Петри
неразрешимы, то возможно, что неразрешима также и сама задача достижимости.
Однако в настоящее время вопрос, разрешима ли (или неразрешима) задача
достижимости, открыт. На сегодняшний день не существует ни алгоритма, решающего
задачу достижимости, ни доказательства того, что такого алгоритма не может быть.
Достижимость и покрываемость.
Для данной сети С с маркировкой u необходимо определить u' R(C, u). Задача
достижимости является первейшей задачей анализа сетей Петри. Многие другие
задачи можно сформулировать в терминах задачи достижимости.
Для этой сети (рис **) тупик может наступить, если достижимым является состояние
(0, 1, 0, 0, 0, 0, 1, 0).
Задача покрываемости. Для данной сети С с маркировкой u и маркировкой u'
определить существует ли такая достижимая маркировка u'' R(C, u), что u''>=u'.
Достижимость
Для сети Петри С=(P, T, I, O) с маркировкой u, u' называется непосредственно
достижимой из u, если существует переход tj такой, что (u, tj ) = u'. Определим
множество достижимости сети Петри С с маркировкой u как множество всех
маркировок, достижимых из u. Маркировка u' принадлежит множеству
достижимостей R(C,u), если существует какая-либо последовательность запусков
переходов, изменяющих маркировку u на u’.
Множество достижимостей R(C,u) для сети Петри С=(P, T, I, O) с маркировкой u есть
наименьшее множество маркировок, определенное следующим образом:
1) u R(C,u)
2) u R(C,u) и u’’= (u ', tj ) для некоторого tj u’’ R(C,u).
.
P3
t1
P1
t2
P2
Для сети изображенной на рисунке и маркировке u=(1,0,0) непосредственно
достижимыми являются две маркировки (1,0,1) и (0,1,0). Из маркировки (1,0,1) можно
получить маркировку (0,1,1) и (0,1,2). Из (0,1,0) нельзя достичь не одной маркировки,
так как ни один переход не разрешен. Можно показать, что множество
достижимостей имеет следующий вид для этой сети R(C,u)={(1,0,n),(0,1,n)|n>=0}
Маркировка μ`` покрывает μ` если μ`` ≥ μ`
Задача покрываемости для данной сети S с начальной маркировкой μ` определить
существует ли маркировка μ`` R (C , ) при условии что μ`` ≥ μ`
Проблема достижимости интерпретируется как возможность достижения состояния.
Задача достижимости: Для данной сети Петри с маркировкой и маркировки ’
определить: ’R(N,)?
Задача покрываемости. Для данной сети Петри N с начальной маркировкой и
маркировки ’ определить, существует ли такая достижимая маркировка ”R(N,),
что ">’. (Отношение "’ истинно, если каждый элемент маркировки " не
меньше соответствующего элемента маркировки ’.)
17. Задача безопасности и ограниченности сети Петри
Безопасность сети Петри.
Позиция в сети Петри является безопасной, если число фишек в ней никогда не
превышает единицы. Сеть Петри безопасна, если безопасны все ее позиции. Позиция
Pi P в сети Петри С=(P, T, I, O) с начальной маркировкой u является безопасной, если
u'(Pi)<=1 для любой u'.
Безопасность очень важное свойство для устройств аппаратного обеспечения.
Позицию можно реализовать одним триггером, если она безопасна. Если позиция не
является кратной входной или выходной для перехода ее можно сделать безопасной
добавляя новые позиции Pi'. Переходы, в которых Pi используется в качестве входной
или выходной модифицируются следующим образом:
Pi I(tj) и Pi O(tj) тогда P’ к O(tj)
Pi O(tj) и Pi I(tj) тогда P’ к I(tj)
Небезопасная сеть:
P3
.
t1
P1
t2
P2
t3
Безопасная сеть:
P3
.
t1
t3
P1
P1'
t2
P2
P2'
Цель введения новой позиции P1' представить условие P1 пуста, следовательно P1'
дополнительный. P1 имеет фишку только если P1’ не имеет фишки и наоборот. Любой
переход, удаляющий фишку из P1 должен помещать фишку в P1'. Начальная
маркировка также должна быть модифицирована, для обеспечения того, чтобы точно
одна фишка была либо в P1 либо P1'.
Ограниченность сети Петри.
Безопасность это частный случай общего случая – ограниченности. Относительно
реального ограничения на аппаратную реализацию позиций можно прийти к выводу,
что безопасность необязательное требование. Безопасность позволяет реализовать
позицию триггером, но в общем случае можно использовать счетчик или регистр.
Однако любой аппаратный счетчик ограничен по макс числу. Позиция является Кбезопасной или К-ограниченной, если количество фишек в ней не может превышать
целое число К.
Позиция Pi P в сети Петри С=(P, T, I, O) с начальной маркировкой u является Кбезопасной, если u(Pi)<=K для всех u' R(C,u).
Одна безопасная позиция называется безопасной. Граница К' по числу фишек,
которые могут находиться в позиции может быть функция позиции, например,
позиция P1 может быть три-безопасной или восьми-безопасной, однако если позиция
Pi то она также K' безопасна для все K’>=K . Поскольку число позиций конечно можно
выбрать К равное максимуму каждой позиции, определив тем самым сеть Петри Кбезопасной, если К безопасна каждая позиция. Позиция называется ограниченной,
если она K-безопасна для некоторого K. Сеть Петри ограниченна если все ее позиции
ограниченны. Ограниченную сеть Петри можно реализовать аппаратно. Сеть Петри с
неограниченными позициями в общем случае реализовать аппаратно нельзя.
18. Использование сетей Петри для количественных оценок функционирования
параллельных КС
В отличие от сетей Петри, в Е-сетях имеются:
несколько типов вершин-позиций: простые позиции, позиции-очереди,
разрешающие позиции;
фишки (метки) могут снабжаться набором признаков (атрибутов);
Кроме того, в Е-сетях с каждым переходом может быть связана ненулевая задержка
и функция преобразования атрибутов фишек и введены дополнительные виды
вершин-переходов, а также в любую позицию может входить не более одной дуги и
выходить также не более одной.
В связи с этим любой переход может быть описан тройкой параметров: dj = (S, t(dj),
(dj)).
Здесь S тип перехода, t(dj) функция задержки, отражающая длительность срабатывания перехода, (dj) функция преобразования атрибутов меток.
... Еще одно важное отличие Е-сетей от сетей Петри состоит в том, что метки
интерпретируются как транзакты, перемещающиеся по сети, а вершины-переходы
трактуются как устройства, выполняющие ту или иную обработку транзактов.
Следствием такого подхода является требование: ни одна вершина-позиция Е-сети не
может содержать более одной метки (то есть любая Е-сеть изначально является
безопасной). ...
Важн особенностью Е-сети является детализация представления метки. С каждой
меткой kl в Е-сети связаны n описателей, что записывается как kl[n]. Значение i-го
описателя в позиции bk обозначается как M(bk(i)). Каждый из описателей метки несет
в себе определенную количественную информацию о моделируемом объекте.
Переход Е-сети модел-т некот событ не тольк на уровне выполнения всех
необходимых условий, но и отражает также ряд операций, связанных с данным
событием, посредством модификации описателей меток. Набор операций и условия
их выполнения задаются процедурой перехода
19. Моделирование сетями Петри задач синхронизации при взаимодействии
процессов в КС
P- и V-системы.
Большинство задач синхронизации не могут быть решены непосредственно сетями
Петри, но они разрешимы на основе известных механизмов синхронизации. В
частности, одним из самых популярных механизмов синхронизации являются P и V
операции над семафором. Семафор это элемент данных, который может принимать
только неотрицательное целое значение. V операция увеличивает значение семафора
на единицу, а P операция уменьшает. P операцию можно применять только в том
случае, когда значение семафора остается в результате неотрицательным. Если же
значение семафора равно нулю, то P операция должна ждать, пока другой процесс не
выполнит V операцию. P и V операции определены как примитивные, то есть никакая
другая операция не может изменять значение семафора одновременно с ними. P и V
операции легко моделируются сетью Петри. Это показано на рисунке:
P(S)
.
S
V(S)
Каждый семафор моделируется позицией. Количество фишек в семафоре показывает
значение семафора. Р операция использует позицию семафора в качестве входа, V – в
качестве выхода.
P и V операции являются основной связью между процессами.
20. Задача активности сетей Петри
Активность.
Причиной рассмотрения сохранения было распределение ресурсов в ВС. Другая
задача, которая может возникнуть при распределении ресурсов в ВС – тупики. Тупики
служат предметом многих исследований.
Прим: Рассмотрим систему, включающую 2 различных ресурса q и r, и два процесса a
и b. Если оба процесса нуждаются в обоих ресурсах, им необходимо будет совместно
использовать эти ресурсы. Для выполнения этого потребуем, чтобы каждый процесс
запрашивал ресурс, а затем освобождал его. Пусть а запрашивает q, затем r и
освобождает q, потом r. А b запрашивает сначала r, затем q и освобождает сначала r,
затем q.
Начальная маркировка, помечаем
ресурсы q(Р4)
P6
P1
.
.
и r(P5), о чем свидетельствуют
фишки, и
P4
указывают на готовность a и b.
Одним
t1
t4
выполнением этой сети является
.
t1,t2,t3,t4,t5,t6, другим –
P2
P7
t4,t5,t6,t1,t2,t3. Не одно из этих
выполнений
P5
не приводит к тупику. Но если
рассмотреть
.
последовательность, которая
начинается
t2
t5
переходами t1,t4, а это означает,
что процесс,
а обладает q и хочет заполучить r,
а b обладает
P3
P8
r и хочет заполучить q, то в этом
случае
система заблокирована, и не
один
t6
t3
процесс продолжаться не может.
Тупик сети Петри- это
переход(множество переходов), который не может быть запущен. В сети на рис. Тупик
возникает, если нельзя запустить t2 и t5. Переход называется активным если он не
заблокирован(не тупиковый). Но это не означает, что переход разрешен. Переход tj
,
сети Петри С называется потенциально запустимым в μ, если R(C , ) , в которой
t1 разрешен. Переход активен в μ если потенциально запустим во всякой маркировке
из R(C, μ). Следовательно, если переход активен, то всегда можно перевести сети
Петри из текущей маркировки в маркировку, в которой запуск перехода станет
разрешенным. При изучении тупиков существует понятие, связанное с активностью. Их
можно разбить на категории по уровню активности и определить для сети Петри с μ
следующим образом:
Уровень 0: переход tj обладает актив уровня 0, если он никогда не может быть
запущен
Уровень 1: - - - -1, если он потенциально запустим, то есть если существует такая
, R(C, ) , что tj разрешен в μ,
Уровень 2: - - - - 2, если для всякого целого n существует последовательность запусков,
в которой переход tj присутствует по крайней мере n раз.
Уровень 3: переход tj обладает активностью уровня 3, если существует бесконечная
последовательность запуска, в которой tj присутствует неограниченное количество раз
,
Уровень 4: - - - - 4, если для всякой R(C, ) существует такая последовательность
запуска g, что tj разрешен δ(μ,, g)
Переход, обладающий активностью ноль, называется пассивным. Переход,
обладающий активностью уровня 4, называется активным. Сеть Петри обладает
активностью уровня i, если каждый ее переход обладает активностью уровня i.
В качестве примера,
иллюстрирующего уровни
активности, рассмотрим сеть Петри
t3
t2
представленную на рисунке.
Переход t0 не может быть запущен
никогда. Он пассивен. Переход t1
можно запустить точно один раз. Он
t1
обладает активностью уровня 1.
Переход t2 может быть запущен
произвольное число раз, но это
t0
число зависит от числа запусков
перехода t3. Однако как только
запуститься t1, а он должен быть
запущен до того, как будет запущен
t2,
число возможных запусков t2 станет фиксированным. Следовательно, t2 обладает
активностью уровня 2, но не уровня 3. С другой стороны переход t3 можно запускать
бесконечное число раз и потому он обладает активностью уровня 3, но не уровня 4,
поскольку как только запустится переход t1, t3 больше запустить будет нельзя.
21. Анализ сетей Петри матричным методом
Матричный способ анализа сетей Петри.
Анализ сетей Петри основывается на матричном способе представления сетей Петри.
Матричный способ основывается на работах Хека. Альтернативным способом по
отношению к определении сети Петри в виде С=(P, T, I, O) является определение двух
матриц D+, D-. Причем матрица D+ представляет входную функцию, а D- выходную.
C=(P, T, D+, D-). C=(P, T, F, B) – представление Хека.
Определим матрицы:
D-(j, i)=#(Pi,I(tj)) D+(j, i)=#(Pi,O(tj))
То есть D- определяет входы переходов, а D+ выходы. Матричная форма
представления сети Петри C=(P, T, D+, D-) эквивалентна стандартному, но позволяет
дать определение в терминах векторов и матриц.
Пусть e[j] – m-вектор, содержащий нули везде, кроме j-ой компоненты. Переход tj
представляется m-вектором e[j], причем e[j] – это вектор строка. Переход tj в
маркировке u разрешен, если u>=e[j]*D-, а результат запуска перехода tj в маркировке
u записывается следующим образом
(u, ) tj1tj2 ...tjk u e[ j ] D e[ j ] D u e[ j ] [ D D ] = u e[ j ] [ D] . Тогда
для последовательности запусков переходов tj1tj2 ...tjk можно получить
(u, ) (u, tj1tj2 ...tjk ) u e[ j1 ] D e[ j2 ] D ... e[ jk ] D
u (e[ j1 ] e[ j2 ] ... e[ jk ]) D u f ( ) D
Вектор f ( ) называется вектором запуска последовательности переходов tj1tj2 ...tjk . i-ый
элемент вектора f ( )i - это число запусков перехода tj в последовательности tj1tj2 ...tjk .
Является вектором с неотрицательным целым компонентом. Вектор f ( ) - это
отображение Париха.
Отображение Париха.
Пусть дана конечная область D={d1, d2, …, dn}. Существует естественное соответствие
между каждым комплектом B на областью D и n-вектором F={f1, f2, … ,fn},
определяемым соотношением fi=#(di,B) – отображение Париха.
Для того, чтобы показать полезность матричного подхода к сетям Петри рассмотрим
задачу сохранения. Является ли заданная сеть Петри сохраняющей?
Необходимо найти ненулевой весовой вектор, для которого взвешенная сумма во всех
достижимых маркировках постоянна. Пусть W->(nx1) – вектор-столбец. Тогда если u
начальная маркировка, а u' произвольно достижима маркировка необходимо, чтобы
uW=u'W. Поскольку u' достижима, то существует последовательность запусков ,
которая переводит сеть Петри из u в u'. Поэтому u ' (u ) u f ( ) D .
uW=u'W=(u+f( ) D)W=u W+f( ) D W
f( ) D W 0
f( ) D W=0
Считаем, что f( ) D W 0 должно быть верно для всех f( ) имеем D*W=0. Таким
образом, сеть Петри является сохраняющей тогда и только тогда, когда существует
такой положительный вектор W, что D*W=0. Это обеспечивает простой алгоритм
проверки свойства сохранения, а также позволяет получить вектор взвешивания W.
Тогда существует последовательность, возможно пустая, запусков переходов сигма,
которая приводит u->u’. Это значит, что f( ) является неотрицательным целым
решением следующего матричного уравнения u'=u+x*D. Следовательно, если u'
достижима из u, то уравнение u'=u+x*D имеет решение в неотрицательных целых.
Если же уравнение u'=u+x*D не имеет решение, то маркировка u' не достижима из
маркировки u.
P2
t2
t1
P4
.
P3
t3
1 1 1 0
D 0 0 0 1
0 0 1 0
D ?
Выбираем начальную маркировку u=(1, 0, 1, 0). Переход t3 разрешен и приводит к
0 1 1 0
маркировке u’=(1, 0, 1, 0)+(0, 0, 1)* 0 2 1 1 =(1, 0, 1, 0) + (0, 0, -1, 1) = (1, 0, 0, 1).
0 0 1 1
Основная проблема матричного метода – отсутствие информации о
последовательности и существовании недействительных решений. Для сетей Петри
важно показать, что задача достижимости разрешима.
Для обоснования существования методов решения обозначим через
Даже если существует последовательность сигма, переводящая сеть Петри из
маркировки u в u', то уравнение u'=u+x*D имеет решение, которое является вектором
запуска f( ) для сигма. Последовательность запусков перехода можно определить из
f( ) путем простого перевода возможных последовательностей длины f( ) .
Последовательность должна быть действительной и приводить от u к u'.
Если решение не существует, то u' недостижимо из u, иначе проверяем f! возможно
упорядоченных переходов. Препятствие - решение f может быть неоднозначным и
включать в себя бесконечное множество векторов запуска, что и затрудняет анализ
матричным методом.
22. Матричный метод анализа сетей Петри- достоинства и недостатки метода.
Достоинства:
решает задачу сохранения: является ли данная маркированная сеть Петри
сохраняющей? Для того чтобы показать сохранение, необходимо найти (ненулевой)
вектор взвешивания, для которого взвешенная сумма по всем достижимым
маркировкам постоянна.
Развитая матричная теория сетей Петри является инструментом для решения
проблемы достижимости. Предположим, что маркировка ' достижима из
маркировки . Тогда существует последовательность (возможно, пустая) запусков
переходов , которая приводит из к ' .
Недостатки:
Заметим, прежде всего, что матрица D сама по себе не полностью отражает структуру
сети Петри. Переходы, имеющие как входы, так и выходы из одной позиции (петли),
представляются соответствующими элементами матриц D è D , но затем взаимно
уничтожаются в матрице D D D .
Другая проблема это отсутствие информации о последовательности в векторе
запуска.
Еще одна трудность заключается в том, что решение уравнения ' x D является
необходимым для достижимости, но недостаточным (полученные
последовательности переходов могут быть не разрешены).
23. Задача достижимости сетей Петри
Поскольку задачи подмножества и равенства для множеств достижимости сетей Петри
неразрешимы, то возможно, что неразрешима также и сама задача достижимости.
Однако в настоящее время вопрос, разрешима ли (или неразрешима) задача
достижимости, открыт. На сегодняшний день не существует ни алгоритма, решающего
задачу достижимости, ни доказательства того, что такого алгоритма не может быть.
Достижимость.
Для данной сети С с маркировкой u необходимо определить u' R(C, u). Задача
достижимости является первейшей задачей анализа сетей Петри. Многие другие
задачи можно сформулировать в терминах задачи достижимости.
Для этой сети (рис **) тупик может наступить, если достижимым является состояние
(0, 1, 0, 0, 0, 0, 1, 0).
Достижимость
Для сети Петри С=(P, T, I, O) с маркировкой u, u' называется непосредственно
достижимой из u, если существует переход tj такой, что (u, tj ) = u'. Определим
множество достижимости сети Петри С с маркировкой u как множество всех
маркировок, достижимых из u. Маркировка u' принадлежит множеству
достижимостей R(C,u), если существует какая-либо последовательность запусков
переходов, изменяющих маркировку u на u’. Множество достижимостей R(C,u) для
сети Петри С=(P, T, I, O) с маркировкой u есть наименьшее множество маркировок,
определенное следующим образом:
1) u R(C,u)
2) u R(C,u) и u’’= (u ', tj ) для некоторого tj u’’ R(C,u).
.
P3
t1
P1
t2
P2
Для сети изображенной на рисунке и маркировке u=(1,0,0) непосредственно
достижимыми являются две маркировки (1,0,1) и (0,1,0). Из маркировки (1,0,1) можно
получить маркировку (0,1,1) и (0,1,2). Из (0,1,0) нельзя достичь не одной маркировки,
так как ни один переход не разрешен. Можно показать, что множество
достижимостей имеет следующий вид для этой сети R(C,u)={(1,0,n),(0,1,n)|n>=0}
Для определения того, является ли маркировка (1, 8, 0, 1) достижимой из
маркировки (1, 0, 1, 0), имеем уравнение
1, 8,
которое
t3t2t3t2t3t2t3t2t3 .
0, 1 1, 0, 1,
0 1 1 0
0 x 0 2 1 1
0 0 1 1
1 1 0
2 1 1 .
0 1 1
0
0, 8, 1, 1 x 0
0
имеет решение x 0, 4, 5 .
Это соответствует последовательности
24. Границы возможностей моделирования с помощью сетей Петри.
Среди достоинств аппарата сетей Петри можно указать следующие:
сети Петри позволяют моделировать асинхронность
и недетерминизм
параллельных независимых событий, параллелизм конвейерного типа, конфликтные
взаимодействия между процессами;
как математическая модель сети Петри занимают промежуточное положение
между конечными автоматами и машинами Тьюринга. При этом по выразительной
мощности они значительно богаче автоматов и приближаются к машинам Тьюринга;
сети Петри включают возможности ряда других моделей, предложенных для
параллельных систем (семафоры Дийкстры, системы векторного сложения и
векторного замещения, вычислительные схемы, модели повторно используемых,
ресурсов и др.), позволяя описывать как типовые ситуации в данных системах
(распределение ресурсов, взаимные блокировки), так и общую динамику работы
сложной асинхронной системы;
стремление расширить применимость аппарата сетей Петри привело к появлению
ряда классов сетей, ориентированных на моделирование сложных систем с учетом
таких факторов, как приоритетность процессов (сети с проверкой на нуль,
приоритетные сети), временные параметры событий (сети Мерлина, временные сети),
совместного отображения структуры управления и потоков данных (Е-сети);
в отличие от моделей параллельных программ (таких, как А-программы, схемы
Карпа-Миллера и др.) сети Петри допускают произвольную интерпретацию элементов
модели как в смысле типа выполняемого фрагмента (выражения, операторы,
подпрограммы, аппаратные функциональные преобразования информации), так и по
уровню абстракции. Таким образом, сети Петри позволяют производить
иерархическую детализацию программных и аппаратных подсистем модели.
Перечисляем то чего нет в сетях Петри, но есть в расширениях (?):
Опыт использования обычных сетей Петри показал высокую трудоемкость
анализа сетей большой размерности на наличие свойств достижимости, живости,
ограниченности и т. д. Это явилось причиной разработки подклассов сетей Петри...
Приоритетные сети и сети с проверкой на нуль позволяют учитывать в модели
приоритетность событий. В сетях с проверкой на нуль для этой цели вводится
дополнительное множество I I прямых инцидентных дуг запрета, причем I I I . На
графе сети Петри дуги, идущие от позиций к переходам, отображающие множество
I , называются дугами запрета. Для срабатывания некоторого перехода dj сети Петри
с проверкой на нуль требуется кроме наличия меток во всех входных позициях I(dj)
также и отсутствие меток во входных позициях запрета I I (d j ) данного перехода.
В приоритетных сетях Петри вводится специальная функция приоритетности,
задающая соотношение приоритетов срабатывания для двух подмножеств переходов
D и D0 , где D , D0 D, D D0 D; D D0 .
Еще одно важное отличие Е-сетей от сетей Петри состоит в том, что метки интерпре-
тируются как транзакты, перемещающиеся по сети, а вершины-переходы трактуются
как устройства, выполняющие ту или иную обработку транзактов. Следствием такого
подхода является требование: ни одна вершина-позиция Е-сети не может содержать
более одной метки (то есть любая Е-сеть изначально является безопасной).
Кроме учета фактора времени отличиями этого класса сетей Петри являются
усложнение логики работы перехода, выделение нескольких базовых типов
переходов, введение в модель различных операций над метками.
Таким образом, в аппарате сетей Петри можно выделить три класса, обладающих
моделирующими свойствами, необходимыми для представления микропроцессорных
КС или их отдельных подсистем. Временные сети могут использоваться в тех случаях,
когда возможно предположение о постоянном времени обработки для каждого
события в модели. Сети Мерлина позволяют рассматривать случай равномерного
распределения времени обслуживания в некотором заданном интервале. Наиболее
же общий случай функционирования микропроцессорных устройств может
моделироваться классом Е-сетей.
В отличие от сетей Петри, в Е-сетях имеются:
несколько типов вершин-позиций: простые позиции, позиции-очереди,
разрешающие позиции;
фишки (метки) могут снабжаться набором признаков (атрибутов);
Е-сетъ задает конкретные детерминированные структуру модели и алгоритм ее
функционирования, однако E-сетевая модель может включать в себя множество
внешних переменных , характер изменения которых не ограничивается. Поэтому Есетъ может служить как детерминированной, так и вероятностной моделью системы.
25. Подклассы сетей Петри
Сети Петри – инструмент исследования систем, теория сетей Петри делает
возможным моделирование системы – представление её виде сетей Петри.
Применяемость сетей Петри исключительно для моделирования.
Модель представляется в математических терминах того, что считают корректным
описанием системы. Как правило модель имеет математическую основу. Возможно
несколько путей практического применения сетей Петри при проектировании и
анализе. В одном из подходов сети Петри – вспомогательный инструмент для анализа.
В результате анализа модели проявляются изъяны и ошибки. Можно предложить
более радикальный подход, в котором весь процесс проектирования и определения
характеристик проводится с помощью сетей Петри.
Подклассы сетей Петри:
Простой сетью Петри называется набор
, где
1.
- множество мест;
2.
3.
- множество переходов таких, что
.
- отношение инцидентности такое, что:
a.
b.
Регулярные сети (вводится алгебра регулярных сетей, строятся операции над
сетями и классы элементарных сетей).
Чистые сети (переход не может иметь позицию Pi в качестве входной и
выходной).
Сети свободного выбора (этот подкласс допускает и конфликты автоматных
сетей Петри, и параллельность маркированных графов, но в более
ограниченном виде, чем в обычных сетях Петри. Сеть Петри со свободным
выбором есть сеть Петри С = (Р, Т, I, О) — такая, что для всех
t j T , pi I (t j ), либо.I (t j ) { pi }, либо.O( pi ) {t j } Важность этого определения
заключается в том способе, которым оно допускает управляемые конфликты.
Конфликт появляется только тогда, когда одна позиция является входом
нескольких переходов. По определению сетей Петри со свободным выбором,
если позиция является входом для нескольких переходов (потенциальный
конфликт), то она является единственным входом всех этих переходов.
Следовательно, либо все эти конфликтующие переходы одновременно являются
разрешенными, либо ни один из них. Это позволяет свободно осуществлять
выбор (разрешение конфликта) запускаемого перехода, присутствие фишек в
других позициях не влияет на выбор запускаемого перехода.
Сети, свободные от конфликтов, если Pi принадлежит I( tj), то Pi принадлежит
О( tj), иначе Pi должна иметь <= 1 выходной переход.
Устойчивые сети ( для такой сети маркировка принадлежит множеству
допустимых маркировок, если 2 любых перехода оказываются в возбужденном
состоянии, то срабатывает один из них не исключая возможности срабатывания
другого )
Автоматные графы ( каждый переход может иметь точно один выход и один
вход)
Маркированный граф – сеть Петри
C ( P, T , I , O) : pi P " выполняется "
I ( pi ) {t j | pi O(t j ) 1
&&
O( pi ) {t j | pi I (t j ) 1
Расширение сетей Петри.
Е-сети
Сети Мерлина
Временные сети
Раскрашенные сети
Приоритеные сети
Сети с проверкой на ноль
Обобщенные сети.
26. Маркированные графы – подкласс сетей Петри
Маркированные графы - каждая позиция такой СП должна иметь не более одного
входного и одного выходного перехода...
...На рис. 2.3 показаны несколько таких подклассов, предложенных в последнее
время, из которых аппараты автоматных графов и маркированных графов по своим
моделирующим свойствам эквивалентны аппарату направленных графов. Эти
подклассы позволяют моделировать алгоритмы функционирования вычислительных
систем, взаимосвязи между подсистемами и ряд других факторов без учета
конкуренции между процессами.
...Ограничение на число входных и выходных переходов позиций сети Петри
bi B I bi O bi 1 ; i 1, n ; n | B |
служит признаком выделения подкласса маркированных графов.
27. Сети Петри и их особенности.
Сети Петри – инструмент исследования систем, в том числе параллельных.
Теория сетей Петри делает возможным моделирование системы математическим
представлением ее в виде сети Петри. Анализ сетей Петри помогает получить важную
информацию о структуре, динамическом поведении моделируемой системы.
Применяются сети Петри исключительно в моделировании. Сети Петри
разрабатываются специально для моделирования тех систем, которые содержат
взаимодействующие параллельные компоненты, программы, устройства. В первые
сети Петри были предложены Карлом Петри в его докторской диссертации. Петри
сформулировал основные понятия теории связи асинхронных компонент ВС. Он
подробно рассмотрел описание причин связи между событиями. В настоящее время
наибольшим вниманием пользуются Е-сети, которые основаны на сетях Петри, но с
определенными добавлениями.
Модель: представление в математических терминах того, что считают
корректным описанием системы.
Как правило модель имеет математическую основу.
Возможно несколько путей практического применения сетей Петри при
проектировании и анализе:
В одном из них сети Петри - вспомогательный инструмент для анализа.
Построенная система моделир. сетью П., затем анализируется. В рез. анализа модели
выявляются некоторые изъяны и ошибки. После этого необходимо снова проанализ. и
промоделир. И т.д.
Можно предложить более радикальный подход, в к-ром весь процесс проектир.
и определения хар-к проводится с пом. сетей П.
Эти 2 подхода и использ. сетей П. в процессе проектир. предлагают исслед.
задач разного типа:
1. Разраб. методов моделир. систем сетями П.
2. ХЗ
В обоих случаях необ. методы анал. сетей П. для опред. св-в модели
Свойства сетей П.:
Осн. определения
Сеть П. сост. из 4х эл-ов:
1. Мн-во позиций P
2. Мн-во переходов
T
3. Входная ф-ия I
4. Вых. ф-ия
O
Опред.: Сеть П. C=(P, T, I, O), где p =(p1...pn) – конечное мн-во позиций n>=0
T= (t1..tm) – тож самое m>=0. Мн-во позиций и переходов не пересекаются.
Входная ф-ия I – отображение из переходов в комплекты позиций.
Среди достоинств аппарата сетей Петри можно указать следующие:
сети Петри позволяют моделировать асинхронность
и недетерминизм
параллельных независимых событий, параллелизм конвейерного типа, конфликтные
взаимодействия между процессами;
как математическая модель сети Петри занимают промежуточное положение
между конечными автоматами и машинами Тьюринга. При этом по выразительной
мощности они значительно богаче автоматов и приближаются к машинам Тьюринга;
сети Петри включают возможности ряда других моделей, предложенных для
параллельных систем (семафоры Дийкстры, системы векторного сложения и
векторного замещения, вычислительные схемы, модели повторно используемых,
ресурсов и др.), позволяя описывать как типовые ситуации в данных системах
(распределение ресурсов, взаимные блокировки), так и общую динамику работы
сложной асинхронной системы;
стремление расширить применимость аппарата сетей Петри привело к появлению
ряда классов сетей, ориентированных на моделирование сложных систем с учетом
таких факторов, как приоритетность процессов (сети с проверкой на нуль,
приоритетные сети), временные параметры событий (сети Мерлина, временные сети),
совместного отображения структуры управления и потоков данных (Е-сети);
в отличие от моделей параллельных программ (таких, как А-программы, схемы
Карпа-Миллера и др.) сети Петри допускают произвольную интерпретацию элементов
модели как в смысле типа выполняемого фрагмента (выражения, операторы,
подпрограммы, аппаратные функциональные преобразования информации), так и по
уровню абстракции. Таким образом, сети Петри позволяют производить
иерархическую детализацию программных и аппаратных подсистем модели.
31. Понятие о топологическом синтезе и анализе структур КС
анализ структурных свойств КС на графе неизбежно приобретает топологический
характер предполагающий использование ряда характеристик, определяющих
количественную меру топологии объекта.
1. Структурная сложность определяется как число элементов и связей,
составляющих структуру КС. 2. Адаптируемость КС приспособленность структуры
КС к внешним и внутренним условиям, позволяющая оптимальным образом достигать
цели функционирования: выполнения, по крайней мере, минимально возможного
количества алгоритмов из заданного набора задач. 3. Диаметр структуры КС
соответствует метрической характеристике, введенной на графе для определения
кратчайшего пути между наиболее удаленными вершинами. В ряде случаев
разработчики структур оперируют понятием среднего диаметра, имеющим большую
системную значимость. 4. Структурная связность КС способность противостоять
разбиению, разделению графа структуры КС на независимые части. 5. Надежность КС
способность структуры КС обеспечить функционирование системы в течение
заданного промежутка времени. 6. Живучесть (отказоустойчивость) КС
оценивает сохранение частей структуры КС, обеспечивающих выполнение
поставленной задачи. 7. Стоимость КС характеристика, оценивающая стоимость
реализации структуры.
Под структурным синтезом КС понимают определение числа вершин и состава
связей между вершинами графа, соответствующего структуре КС. Такую структуру
принято называть топологической.
Синтез топологической структуры представляет собой выбор, или выделение из
заданного множества графов некоторого подмножества, которое наилучшим образом
соответствует заданным функциям и целям. Принципиальной особенностью задачи
синтеза является то, что нет универсальных методик формального перехода от
заданных свойств к модели топологии объекта.
32. Разбиение чисел. Основные понятия и определения. Принцип Дирихле.
Разбие́ние числа́ n — это способ записать натуральное число n в виде суммы
натуральных чисел. При этом порядок слагаемых не учитывается, т.е. способы,
отличающиеся только порядком слагаемых, считаются одним разбиением. Если
порядок учитывается, то говорят о композициях числа n. Для разбиений можно
выбрать любой порядок слагаемых; канонической считается запись в виде
невозрастающей последовательности положительных целых.
Число разбиений числа n принято обозначать p(n). Последовательность p(n) имеет
следующую производящую функцию:
Асимпототическое выражение для количества разбиений было получено Харди и
Рамануджаном и впоследствии уточнено Радемахером. Оригинальное выражение
Харди — Рамануджана
при
дает, например,
разбиений в виде сходящегося ряда
. Уточнение Радемахера представляет число
где
Здесь суммирование ведется по m, взаимно простым с k, а s(m,k) - сумма Дедекинда.
Ряд сходится очень быстро.
Принцип Дирихле. Если n(k, r) — наименьшее целое n при котором в каждом
разбиении этого n на r частей найдется часть, не меньшая чем k, то
n(k,r) = rk - r + 1.
Этот принцип часто формулируют в терминах размещений и именуют его как Принцип
ящиков. При любом размещении (r+1) предметов по r ящикам найдется ящик с по
крайней мере двумя предметами.
33. Вложимость разбиений
Разбиение {k1. . . , kt) вложимо в разбиение ( n1,. . . , nr), если существует
отображение f: {1,...,t}—>{1,...,r}, при котором выполняется система неравенств:
где
– полный прообраз элемента i
1 i j : j 1, ..., t , j i
. Иными словами, разбиение
при отображении
n , ..., n ,
разбиение
1
если части
r
сгруппировать в r групп (каждая часть
ki
ki
разбиения
k , ..., k
k , ..., k
1
t
1
t
вложимо в
можно так
входит в одну группу и пустые группы
допускаются), что после сложения всех частей
pi ni i 1, ..., r . Например, (2, 2, 2)
ki
в каждой группе получится r чисел
(4, 2), так как (4, 2) = (2 + 2, 2), но (2, 2,
2) Ú (3, 3), поскольку нельзя три двойки сгруппировать в пару групп, каждая из
которых не превосходила бы трех. Вложимость является бинарным отношением на
множестве вообще всех разбиений всех натуральных чисел. Несложно проверить, что
это бинарное отношение вложимости обладает следующими свойствами:
(а) рефлексивность:
n , ..., n n , ..., n ;
1
r
(б)
1
r
антисимметричность:
k , ..., k n , ..., n , n , ..., n k , ..., k ,
k , ..., k n , ..., n ;
1
t
1
r
1
t
1
r
1
(в)
r
1
t
транзитивность:
k , ..., k m , ..., m , m , ..., m n , ..., n ,
k , ..., k n , ..., n .
1
t
1
t
1
1
l
1
l
1
t
r
вложимость – отношение частичного порядка на множестве разбиений чисел.
если
то
если
то
34. Ранговое условие вложимости
В ряде случаев удается сразу, без какой-либо алгоритмической проверки, решить
комбинаторную задачу распознавания о вложимости разбиений. Так, от
необходимости выяснения вопроса о вложимости разбиений некоторых
фиксированных рангов избавляет следующая теорема.
35. Принцип полного размещения
36. Вложимость с ограничениями
37. Комбинаторные модели для исследования процесса распределения памяти КС.
Перераспределение памяти КС это перенесение ряда информационных объектов из
адресного пространства оперативной памяти на вспомогательную память с целью
освобождения оперативной памяти и размещения в ней других информационных
объектов, необходимых для продолжения вычислительного процесса. Под
реорганизацией памяти будем понимать перемещение информационных объектов в
адресном пространстве памяти.
Существуют два способа распределения памяти: статический и динамический. (статич.
– до вып-я проги, один раз)
... Поэтому наши исследования будут направлены на изучение процесса
распределения памяти вычислительных систем с сегментной организацией программ
и данных, которые обладают следующими преимуществами по сравнению с
системами со страничной организацией памяти:
• существенно упрощается решение задачи организации внешних ссылок в
сегментах, так как в этом случае от объединяющей программы не требуется работы с
абсолютными адресами;
• облегчается управление решением реентерабельных программ;
• исключаются потери в эффективности использования памяти из-за округления
размеров запросов до принятого в системе размера страниц (потери на внутреннюю
фрагментацию).
...
Модель 1. В любой момент времени функционирования АСУ влияние внешней
фрагментации на процесс распределения памяти достаточно полно характеризуют
следующие параметры:
• количество свободных (занятых) участков памяти;
• размер свободных (занятых) участков;
• суммарный размер свободной (занятой) памяти.
Запросы на выделение памяти в этих исследованиях в любой момент времени
функционирования АСУ достаточно полно характеризуются следующими
параметрами:
• количеством запросов в очереди на выделение памяти;
• требуемыми размерами непрерывных участков адресного пространства памяти
или размерами запросов;
• суммарным размером памяти, требуемой для удовлетворения запросов из
очереди.
Модель 2. Особенностью распределения памяти в КС с сегментной организацией
программ и данных является неделимость поступающих запросов на выделение
памяти, т. е. для удовлетворения каждого запроса требуется непрерывный участок
адресного пространства памяти различной длины. Такая организация распределения
памяти применяется в реальных системах телеобработки данных типа КАМА, при
распределении оперативной памяти многопроцессорных вычислительных комплексов
(МВК) ЭЛЬБРУС и ряда других систем. Удовлетворение любого запроса на память
здесь реализуется последовательным выполнением двух процессов: процессом
поиска свободных непрерывных участков адресного пространства памяти, равных или
превосходящих размер запроса, и процессом выделения этой свободной памяти под
запрос.
Оба эти процесса могут быть реализованы различными алгоритмами, однако в
итоге их работы найденный участок свободной памяти либо полностью исключается
из списка свободных участков (при равенстве размеров запроса и участка памяти),
либо в списке свободной памяти учитывается остаток свободной памяти или разность
размера свободной памяти и размера запроса (при выбросе большего размера
свободного участка памяти относительно размера запроса). Вследствие этого может
оказаться, что в одном участке свободной памяти удовлетворяется более одного
запроса на память. Это означает, что процессы удовлетворения запросов на память
можно моделировать понятием вложимости разбиений чисел.
38. Особенностью распределения памяти в КС с сегментной организацией программ
и данных (Модель 2)
Модель 2. Особенностью распределения памяти в КС с сегментной организацией
программ и данных является неделимость поступающих запросов на выделение
памяти, т. е. для удовлетворения каждого запроса требуется непрерывный участок
адресного пространства памяти различной длины. Такая организация распределения
памяти применяется в реальных системах телеобработки данных типа КАМА, при
распределении оперативной памяти многопроцессорных вычислительных комплексов
(МВК) ЭЛЬБРУС и ряда других систем. Удовлетворение любого запроса на память
здесь реализуется последовательным выполнением двух процессов: процессом
поиска свободных непрерывных участков адресного пространства памяти, равных или
превосходящих размер запроса, и процессом выделения этой свободной памяти под
запрос.
Оба эти процесса могут быть реализованы различными алгоритмами, однако в итоге
их работы найденный участок свободной памяти либо полностью исключается из
списка свободных участков (при равенстве размеров запроса и участка памяти), либо в
списке свободной памяти учитывается остаток свободной памяти или разность
размера свободной памяти и размера запроса (при выбросе большего размера
свободного участка памяти относительно размера запроса). Вследствие этого может
оказаться, что в одном участке свободной памяти удовлетворяется более одного
запроса на память. Это означает, что процессы удовлетворения запросов на память
можно моделировать понятием вложимости разбиений чисел. Пример 1. Пусть группа
запросов на память сост из объемов (5, 2, 1), а сист-а участков своб памяти из
объемов (6, 3, 3), тогда одноврем удовлет-е всех этих запросов осущ-мо, причем не
единст спосо-м: (6 содержит 5 и 1; 3 сод-т 2; 3 сод-т 0), (6 сод-т 5; 3 сод-т 2 и 1; 3 сод-т
0), (6 сод-т 5; 3 сод-т 2; 3 сод-т 1). Таким образом, групп-а запр-в для их размещения в
участках свободной памяти в точности отражает реальную работу алгоритмов
динамического распределения памяти.
39. Комбинаторные модели для оценки необходимого размера памяти КС (Модель
4) (СМОТРЕТЬ СВОЕ)
Модель 4. Рассматривается функционирование КС, в которой запросы на
выделение памяти поступают группами. Пусть размеры запросов группы, поступившие
в произвольный момент времени, соответствуют частям разбиения k1 , ..., kt ¢ k .
Свободная память в рассматриваемый момент времени представлена r участками с
суммарным размером n . Тогда согласно принципу полного размещения вычисление
величины
n k1 , ..., kt ; r n 22, 21, 21, 20 ¢ 85,
при условии k1 ... kt обеспечивает нахождение такого суммарного размера
свободной памяти, который, будучи представленным любым разбиением на г
непрерывных свободных участков адресного пространства, позволит полностью
разместить в ней все k1 , ..., kt без ее перераспределения и реорганизации. Из
формулы принципа полного размещения видно, что для решения этой задачи не
требуется информации о размерах свободных участков памяти, а следовательно, для
каждого из запросов группы не требуется просмотр списка свободной памяти КС. С
этой целью достаточно проверить справедливость неравенства n k1 , ..., kt ; r , где r
количество фрагментов, которыми представлена свободная память размером n .
Если неравенство выполняется, то из доказательства принципа полного размещения
следует, что для удовлетворения запросов k1 , ..., kt можно использовать любой
алгоритм динамического распределения памяти, который учитывает упорядоченность
запросов по убыванию их размеров. Иными словами, все запросы величиной
k1 , ..., kt можно одновременно удовлетворить в свободной памяти n1 , ..., nr ,
например, по алгоритму first-fit, если при выборе запросов из очереди учитывается их
упорядоченность по убыванию размера. Следовательно, принцип полного
размещения может быть использован при проектировании методов динамического
распределения памяти КС АСУ.
Пример 2. Пусть размеры запросов представлены частями разбиения
k1 , ..., kt 22, 13, 12, 8, 4, 2, 2, 1 ¢ 64 , а непрерывные участки адресного пространства
свободной памяти разбиением n1 , ..., nr 23, 21, 21, 20 ¢ 85 . Тогда
n k1 , ..., kt ; r n 22, 13, 12, 8, 4, 2, 2, 1; 4 85
и, следовательно, разместить все представленные запросы можно, например,
следующим образом: (23 = 22 + 1, 21 = 13 + 8, 21, 20 = 12 + 4 + + 2 + 2). Если же
n1 , ..., nr 23, 21, 21, 20 ¢ 84 , то принцип полного размещения уже не влечет
требуемой вложимости, несмотря на то, что последняя все же имеет место. Это
характеризует «зону неопределенности» в экстремальных комбинаторных оценках.
40. Комбинаторная модель, позволяющая произвести расчет оценки сверху
необходимого размера оперативной памяти КС
Модель 6. Пусть множество возможных состояний занятой памяти КС
интерпретируется множеством разбиений чисел d1i , ..., dvi , i 1, ..., l , где любая
i
i
часть i-го разбиения dr соответствует размеру r-го занятого участка адресного
пространства памяти, a vi количество занятых участков, представленных частями i-го
разбиения числа. Для каждого i-го состояния занятой памяти известно множество
групп запросов, каждая из которых в процессе функционирования АСУ может
потребовать одновременного удовлетворения всех своих запросов при i-м состоянии
занятой памяти КС.
Пусть множество разбиений чисел k1 j , ..., kt j
i
j
соответствует такому множеству
групп запросов для i-го состояния занятой памяти; части этих разбиений соответствуют
размерам запросов на память, а ранг t j количеству запросов в j-й группе
i 1, ..., l; j 1, ..., mi . Учитывая влияние внешней фрагментации, полагаем, что в
процессе функционирования АСУ при удовлетворении каждой группы запросов,
соответствующей i-му состоянию занятой памяти, свободная память КС оказывается
«раздробленной» на не более чем vi 1 непрерывных участков адресного
пространства, где vi число занятых участков памяти, соответствующих i-му
состоянию. Тогда оценка сверху V необходимого размера памяти КС, которой в
процессе функционирования АСУ будет достаточно для удовлетворения любой
поступающей группы запросов с учетом принципа полного размещения, вычисляется в
соответствии с выражением
при k1 j , ..., kt j
j
i
v
V max max n k1 j , ..., ktj j ; vi 1 d ri
1i l 1 j mi
r 1
i
i
, где n k1 j , ..., ktj j ; vi 1 опред-ся по формуле принципа
полн размещ-я для кажд разбиен k1 j , ..., kt j , a
i
j
и при удовлет-и запросов группы.
v
d
r 1
i
r
суммарн размер занят. пам-
41. Диаграммы Ферре и инверсии в бинарных последовательностях
Разбиения удобно представлять в виде наглядных геометрических объектов,
называемых диаграммами Ферре. Диаграмма Ферре разбиения — подмножество
первого квадранта плоскости, разбитое на ячейки, каждая из которых представляет
собой точку. Ячейки рамещаются в строки, первая строка имеет длину k1, над ней
расположена строка длиной k2, и т. д. до m-ой строки длины km. Строки выровнены
по левому краю.
Более формально, диаграмма Ферре — это замыкание множества точек (x,y)
таких, что
x,y > 0 и
где [x] обозначает целую часть x.
Разбиение можно изобразить графически, с помощью графа Ферре (Ферррер)
(1, 22 ,32 , 4)
42. Влияние топологии на технические характеристики ВС
Сложность сети растет с ростом числа узлов. Для связной сети n <= m+1. Связные сети
максимальной однородности при n > 2 – кольца с числом узлов равным числу ребер.
Для неориентированной сети показатель сложности – показатель однородности ее
элементов. Сравнивая этот показатель с показателем максимально однородной сети
можно определить сложность данной сети. Сложность сети обычно связана с ее
стоимостностными характеристиками. Суммарная стоимость элемента сети: c1n + c2m.
Адаптация сети для достижения максимальной эффективности сводится к задаче
изоморфного вложения сетей.
Ресурс – любой аппаратный или программный элемент, которым можно оперировать
независимо от других.
Саму ВС и выполняемые ей задачи можно представить графом ресурсов.
43. Классы характеристик КС
1. Структурная сложность определяется как число элементов и связей,
составляющих структуру КС. В случае необходимости выделяются элементы,
соответствующие изолированным, висячим и тупиковым вершинам графа.
Изолированные вершины неинцидентны ни одному из ребер графа, висячие
соответствуют вершинам, в которые нельзя попасть ни из одной другой вершины
графа, тупиковые вершины, из которых нельзя попасть в другие вершины графа.
Наличие в графе изолированных вершин обычно свидетельствует об ошибках,
допущенных при формировании или описании структуры КС, поскольку вся система
всегда целостный объект. Исследование числа и особенностей связей между
элементами структуры направлено, прежде всего, на выявление в соответствующем
графе контуров и сильно связанных подграфов. Структурная сложность может быть
оценена числом остовных деревьев, содержащихся в графе структуры КС.
2. Адаптируемость КС приспособленность структуры КС к внешним и внутренним
условиям, позволяющая оптимальным образом достигать цели функционирования:
выполнения, по крайней мере, минимально возможного количества алгоритмов из
заданного набора задач.
3. Диаметр структуры КС соответствует метрической характеристике, введенной
на графе для определения кратчайшего пути между наиболее удаленными
вершинами. В ряде случаев разработчики структур оперируют понятием среднего
диаметра, имеющим большую системную значимость. По значению диаметра
(среднего диаметра) можно косвенно судить о ряде предельных параметров КС, в
частности, о ее надежности, длительности задержек сообщений, инерционности,
количестве разделяющих вершин и ребер.
4. Структурная связность КС способность противостоять разбиению,
разделению графа структуры КС на независимые части. Данная количественная
характеристика позволяет выявить наличие обрывов в топологии, «мосты», и т. д. В
теории графов существует несколько определений связности, обусловленных
различными критериями. Расчет этих характеристик позволяет оценить структуры КС с
разных точек зрения.
5. Надежность КС способность структуры КС обеспечить функционирование
системы в течение заданного промежутка времени. Надежность является одной из
важнейших многопараметрических характеристик структуры и определяется как
надежностью элементов, так и схемой объединения элементов.
6. Живучесть (отказоустойчивость) КС оценивает сохранение частей структуры
КС, обеспечивающих выполнение поставленной задачи. Живучесть имеет тесную
функциональную связь с показателями надежности.
7. Стоимость КС характеристика, оценивающая стоимость реализации структуры.
Наилучшей структурой КС считается та, которая либо наиболее эффективна при
заданной стоимости, либо обладает заданными параметрами при минимальной
стоимости. Стоимость элементов КС предполагается не зависящей от времени (см.
подраздел 4.8).
44. Абсолютно однородная сеть (определение, примеры).
Под [n,m]-сетью будем понимать связанный граф с числом вершин X n и
числом ребер Y m
Требование однородности позволяет ограничиться сетями без петель и кратных
ребер с минимальной валентностью (p) узлов, равной 2
nm
1
n(n 1)
2
Если m=n, то [n,m]-сеть представляет собой кольцо: pi 2 для все n абсолютно
однородно.
1
1
n(n 1) , то получается [ n, n( n 1)] -сеть, является полным графом, у
2
2
которого pi n 1 для любого i.
Если
m
45. Какую сеть можно назвать уницентральной
Пропускная способность сети определяется максимальным потоком сообщений,
который можно организовать между ее узлами. При равной пропускной способности
ребер и узлов, проп. спос. обратно пропорциональна среднему диаметру и диаметру
сети.
Диаметр d – это максимальное расстояние, определяемое как
d max {d ij }, i , j {0,..., N 1}
i, j
,
где dij – расстояние между вершинами i, j рассматриваемой КС. Расстояние dij есть
минимальная длина простой цепи между вершинами i, j, где длина измеряется в
количестве ребер между вершинами i, j.
Средний диаметр d определяется как
d pnp
d
,
p1 ( N 1)
где p – расстояние от текущей вершины до выделенной (произвольной),
np – число вершин, находящихся на расстоянии p от выделенной (мода).
Дополнительно: Так как сеть является связанным графом для любой пары узлов,
существует путь без циклов, соединяющий эти узлы. Число ребер в пути естественно
назвать его длиной. Тогда расстояние (xi, xj) между узлами будет определяться как
минимальная длина пути между ними.
Напомним, что
величина
ρ( xi ) max ρ( xi , x j )
d max ( xi )
i
j
является диаметром сети в узле xi,
диаметром, а величина
ρ min ρ( xi )
i
радиусом
сети. Узел xi, для которого ρ( xi ) ρ, назовем центром сети. Тогда, сеть, у которой
все узлы являются центрами, называется уницентральной.
46+47. Построить двухкаскадный коммутатор КС
48. Понятие о сложности сети КС
Сложность сети растет c ростом числа составляющих ее элементов узлов и ребер.
Для связной сети число ребер не может быть меньше числа узлов без единицы, а
связные сети максимальной однородности при числе узлов, большем двух,
представляют собой кольца с числом узлов, равным числу ребер. Для
неориентированной сети в качестве показателя сложности можно использовать
показатель однородности ее элементов, определяемый с помощью числовых
инвариантов. Сравнивая этот показатель для конкретной сети с заданным числом
узлов n и ребер m с показателем максимально однородной сети с таким же числом
элементов, можно определить, насколько данная сеть отличается от наименее
сложной. Сложность сети зависит не только от числа элементов, но и от их
взаимосвязи, которое можно охарактеризовать через разность числа ребер и числа
узлов l = m n.
Сложность сети зависит не только от числа элементов, но и от их взаимосвязи,
определяемой по валентности узлов и максимально однородной двухвалентной сети.
Сложность сети во многом определяет ее стоимостные характеристики. Суммарная
стоимость элементов сети С1n + С2m, где C1 и C2 стоимости оборудования узла и
канала связи, задает средства, вложенные в создание сети и затрачиваемые на
поддержание ее технической работоспособности.
50. Проблемы адаптации структуры КС к алгоритмам решаемых задач в терминах
теории графов
Большой практический интерес представляет проблема вложения графов в другие
графы, имeющиe cпeциaльныe стрyктypныe cвoйcтвa. Так, например, важным клaccoм
таких гpaфoв являeтcя клacc n-мepныx кyбoв. Они находят пpимeнeниe в тeopии
кoдиpoвaния пpи пepeдaчe дaнныx и пpи пpoeктиpcвaнии aвтoмaтoв. Обозначим nмepный куб чepeз Hn. Мощность его носителя paвнa 2n, мoщнocть cигнaтypы n2nl.
Введем метрику на графе Hn cлeдyющим oбpaзoм. Пусть неотрицательная функция
от двух переменных d(a, b) определяет расстояние между двумя вершинами a, b Hn,
равное числу ребер в кратчайшей простой цепи, соединяющей a и b. При этом
выпoлняютcя cлeдyющиe ycлoвия:
1. d(a, a') = 0 тогдa и тoлькo тoгдa, кoгдa вepшины a и a' coвпaдaют.
2. d(a, b) = d(b, a).
3. Для любых трех a, b, c Hn.
d(a, b) + d(b, c) d(a, c).
Cлeдoвaтeльнo, мнoжecтвo вepшин n-кyбa вмecтe c ввeдeннoй тaким oбpaзoм
мeтpикoй являeтcя мeтpичecким пpocтpaнcтвoм, кoтopoe нaзoвeм бyлeвым
пространством. Если метрика введена в данное множество, то oна введена и в
любoe eгo пoдмнoжecтвo кaк ограничение функции d. Поэтому всякий подграф n-кyбa
также мeтpичecкoe пpocтpaнcтвo.
Рассмотрим задaчy вложения гpафа G в бyлeвo пpocтpaнcтвo Hn. Гpaф G = V, U
нaзывaeтcя влoжимым в бyлeво пространство Hn = VH, UH или кyбируемым, ecли
cyщecтвyeт cooтвeтcтвиe мeждy вepшинaми гpaфa G и гипepкyбa Hn тaкoe, чтo ecли
(v, v) U, тo ((v), (v)) UH. Kyбиpyeмый гpaф не cлeдyeт пyтaть c кyбичecким
гpaфoм гpaфoм, кaждaя вepшинa кoтopoгo имeeт cтeпeнь, paвнyю тpeм.
Taк как n-кyб являeтcя двyдoльным гpaфoм, тo в cooтвeтcтвии c тeopeмoй Keнигa вce
eгo пpocтыe циклы чeтны и пoэтoмy любoй гpaф, кoтopый coдepжит пoдгpaф,
являющийcя нeчeтным циклoм, нeкyбиpyeм. Taк как n-кyб изоморфeн диcтpибyтивнoй
peшeткe, тo гpaф Keнигa K2,3 (pиc. 4) также является некубируемым гpaфoм. Любой жe
чacтичный гpaф циклa нeчeтнoй длины и гpaф K2,3 влoжимы в бyлeвo пpocтpaнcтвo.
Cлeдoвaтeльно, циклы нeчeтнoй длины и гpaф Keнигa K2,3 являютcя зaпpeщeнными
фигypaми влoжeния гpaфa в бyлeвo пpocтpaнcтвo.
Pиc. 4. Граф Кенига K2,3
Под запрещенной фигурой в данном cлyчae понимаем кpитичecки нeвлoжимый
гpaф, т. e. гpaф нeкyбиpyeмый, y кoтopoгo вce чacтичныe гpaфы кyбиpyeмыe [11, 14].
Одной из известных процедур порождения запрещенных фигур на ocнoвe известныx
является процедура Гpexeмa. Замена pебpa в грани запрещенной фигуры Q на граф
Keнигa K2,3 бeз этoгo peбpa , т. e. K2,3/, пopoждaет нoвyю зaпрещeннyю фигypy T1(Q).
51. Диаметр и средний диаметр [n,m]-сети
Пропускная способность сети определяется максимальным потоком сообщений,
который можно организовать между ее узлами. При равной пропускной способности
ребер и узлов, проп. спос. обратно пропорциональна среднему диаметру и диаметру
сети.
Диаметр d – это максимальное расстояние, определяемое как
d max {d ij }, i , j {0,..., N 1} ,
i, j
где dij – расстояние между вершинами i, j рассматриваемой КС. Расстояние dij есть
минимальная длина простой цепи между вершинами i, j, где длина измеряется в
количестве ребер между вершинами i, j.
Средний диаметр d определяется как
d pnp
d
,
p1 ( N 1)
где p – расстояние от текущей вершины до выделенной (произвольной),
np – число вершин, находящихся на расстоянии p от выделенной (мода).
Дополнительно: Так как сеть является связанным графом для любой пары узлов,
существует путь без циклов, соединяющий эти узлы. Число ребер в пути естественно
назвать его длиной. Тогда расстояние (xi, xj) между узлами будет определяться как
минимальная длина пути между ними.
Напомним, что
величина
ρ( xi ) max ρ( xi , x j )
d max ( xi )
i
j
является диаметром сети в узле xi,
диаметром, а величина
ρ min ρ( xi )
i
радиусом
сети. Узел xi, для которого ρ( xi ) ρ, назовем центром сети. Тогда, сеть, у которой
все узлы являются центрами, называется уницентральной.
52+53. Надежность сети КС
Сложность КС отрицательно сказывается на ее надежности, в то время как характер
выполняемых задач требует именно высокой надежности.
Под надежностью КС понимают свойство КС выполнять все заданные функции при
определенных условиях эксплуатации в течение заданного времени с сохранением
значений основных параметров в заранее установленных пределах.
Отказ событие, состоящее в полной или частичной утрате работоспособности
системой. Отказы являются событиями случайными и наступают всякий раз тогда,
когда система не сохраняет своих параметров в заданных пределах.
Основной количественной характеристикой надежности является P(t), которая
определяется вероятностью безотказной работы КС, т.е. вероятностью того, что при
заданных режимах и условиях эксплуатации в течение заданного времени работы КС
отказ в ней не возникает
Р(t) = Р{T > t},
где Т наработка на отказ КС; t заданное время; Р{А} вероятность события А,
в данном случае событие А состоит в том, что T > t.
По аналогии с функцией надежности введем функцию ненадежности (вероятность
отказа) Q (t) = Р{Т t}.
Из определений функций P(t) и Q(t) следует P(t)+ Q(t) = 1 или P(t) = 1 Q(t).
Если заданное время t произвольно, то Р = 1 Q. Из последнего равенства следует,
что мерой Р может служить Q: чем выше значение Q, тем хуже надежность КС.
Количественно ненадежность сети определяется вероятностью разрушения связей
между узлами сети, если известны вероятности отказов линий связи и узлов
коммутации. При топологическом проектировании сетей естественно полагать, что
отказы каких-либо узлов и ребер являются независимыми случайными событиями,
характеризуемыми одинаковыми для всех узлов (q1) и ребер (q2) вероятностями
появления. Если в этих предположениях вычислить вероятности Qij отказа связи между
узлами сети i, j = l, 2, ..., n, то надежность сети можно определить выражением
Q max Qij .
i j
(4.9)
На практике часто оказывается удобным рассматривать отдельно реберную (q1 = 0)
и узловую (q2 = 0) надежности сети, определяемые через реберную Q2ij и узловую Q1ij
вероятности отказа связи между узлами ij сети, когда соответственно отказывают
только ребра или только узлы. Глобальные реберная Q2 и узловая Q1 оценки
надежности сети могут быть определены аналогично (4.9).
Надежность – вероятность безотказной работы.
Q=1–P
0
n
-1
1
i
n
-2
Рассчитаем надежность кольцевой сети. Необходимо пройти сеть от 0 до i по часовой
стрелки, либо против. Надежность будет равна:
1 q 1 q 1 q
i 1
i
1
n i
2
1
q1 – отказ узла
q2 – отказ ЛС
Если n = 2l, i=l =>
Q 1 q1 1 q2
l
1 q2 ni1
l 1 2
Расчет надежности сложен даже для простых систем.
54. Отказоустойчивость (живучесть) топологической структуры КС
Живучесть – свойство систем адаптироваться к новой ситуации и противостоять
неблагоприятным воздействиям, при этом выполняя свою целевую функцию, за счет
изменения структуры и поведения системы даже при повреждении ее частей.
Есть след. подходы:
1.
Создание модели живучести на основе анализа взаимодействия системыв и
среды
2.
Определение предельной живучести КС и вероятностный анализ сохранения
системой своих функций
3.
Определение степени живучести КС по отношению к некоторому стандартному
возмущению
Живучесть системы должна проектироваться исходя из возможного кртерия и круга
задач.
Уровни проектирования живучести
1.
Микроуровень – улучшение качества элементов
2.
Подсистем – вопросы компоновки и избыточности элементов
3.
Макросистем – организация подсистем и блоков
Если есть задача, чтобы система работала при одном отказе с вероятностью 1, то
необходимо трансформирование системы.
Живучесть – многокритериальная задача оптимизации.
Модели анализа живучести
1.
Модель внешней сети
2.
Модель взаимодействия аппаратных средств системы
3.
Модель взаимодействия компонент ПО
4.
Модель контроля и диагностики аппаратных и программных средств
5.
Модель вычислительного процесса при решении задач
6.
Модель надежности
Будем говорить, что алгоритм А выполним на КС с именем S, если структура А
изоморфна некоторому подграфу S, т.е. суцествует отображение A->S.
Удаление из графа S любых к-вершин - к-кратная неисправность. Система S является
толерантной относительно алгоритма А и неисправности F…
Система толерантна относительно мн-ва алгоритмов А1…АN и множества
неисправностей F1..Fq, если Аi выполним системой при всех Fj.
В данной модели исследования живучести предполагается, что в КС имеется
некоторое заведомо исправное ядро, выполняющее функции обнаружения
локализации неисправностей. Выполняется реконфигурация и восстановление
системы.
55. Связь стоимостных характеристик и топологии КС
Первые практические шаги на пути создания больших КС породили вопросы,
связанные с оценкой эффективности этих работ, определением экономической
целесообразности выбора той или иной топологии.
При анализе топологии возникает задача связать стоимость выбираемой
топологической структуры КС с характеристиками стоимости элементов, составляющих
ее. Наилучшей топологической структурой считается та, которая либо наиболее
эффективна при заданной стоимости, либо обладает заданными параметрами при
минимальной стоимости.
При топологическом проектировании сетей технические характеристики узлов и
ребер, составляющих сеть, одинаковы. В этих предположениях, задав стоимость узла
C1 и стоимость ребра С2, получим стоимость [n, m]-сети
C n, m C1n C2m.
При заданном n наименьшую стоимость имеет кольцо (n, 2), а наибольшую
полный граф (n, n 1)
C n, 2 n C1 C2 ;
n 1
C n, n 1 n C1
C2 .
2
Как правило, проектирование сети заключается в выборе числа ребер и
распределении их между узлами так, чтобы получить требуемые значения
надежности и пропускной способности. При этом удобно пользоваться относительной
C n, m C1n . Из определения сети следует, что m = n + l, тогда
относительная стоимость будет иметь вид 1 1 l n , где C2 C1 , и в
стоимостью
качестве функции стоимости сети удобно использовать выражение
A(n, l ) l n .
Для КС со структурой «кольца»
структурой
полного
графа:
l0 0 и A0 A(n, 0) 0,
l
а для КС со
n(n 1)
n(n 3)
n
2
2
n(n 3)
n3
Amax A n,
δ
.
2
2
Тогда для произвольной сети без кратных ребер
0 (n, l )
n3
.
2
Функцию А(n, l) можно интерпретировать как относительную дополнительную
стоимость сети.
и
56. Приведите общее выражение для переключающей матрицы
M U1 ...U n M 2n 2n
MU1 ...U n
U [ M ] n1 n1
2 2
U [ M ]2n12n1
U [ M ]2...
U [ M ]2...
Матрица М симметрична относительно главной диагонали.
Придавая матрице логические значения можно подключить любой вход к любому
выходу.
57. Определите
d в узле КС и в КС (структура КС условно изображена на рисунке)
Мода узла (nl) – число узлов, находящихся на расстоянии l от выделенного.
d max{d ij } ;
1 d
dl
l nl ;
n 1 l 1
1 n
d dl ;
n l 1
x1
x2
x4
x3
d 2
1
4
1
1
4
d1 (2 1 1 2)
d 2 (3 1) 1 d3 (2 1 2 1)
3
3
3
3
3
1
d 4 (3 1) 1
3
d
14 7
12 6
58. Дайте определение реберного графа и постройте граф L(G), если граф G имеет
вид:
x1
U1
x2
U5
U4
x4
U2
U6
U3
x3
Реберный граф Gl графа G имеет столько же вершин, сколько ребер у графа G. Ребро
между двумя вершинами графа Gl существует тогда и только тогда, когда ребра графа
G, соответствующие этим двум вершинам, смежны (т.е. инцидентны одной и той же
вершине графа G).
x1
x4
x2
x6
x5
x3
59. Приведите определение и приведите особенности параллельных КС с
магистральными связями.
В ряде практических случаев предпочтительнее объединять системы общей шиной
(магистралью). Такие КС допускают одновременную передачу сообщений от одной КС
к нескольким по одному физическому каналу. Такой способ построения эффективен
для сетей, содержащих десятки процессоров. Преимуществом таких сетей являются
невысокая стоимость и простота наращивания.
Системы с общей шиной имеют два главных недостатка. Первый - невысокое
быстродействие, так как одновременный обмен информацией возможен между
двумя устройствами, не более. По этой причине в системах с общей шиной число
процессоров невысоко. Второй недостаток при объединении общей шиной
заключается в относительно низкой надежности системы из-за наличия общего
элемента - шины. Надо иметь в виду, что надежность общей шины определяется не
только надежностью проводов и кабелей (их собственная надежность достаточно
высока), но и надежностью всех соединений, входных и выходных цепей устройства.
Отказ хотя бы одного из элементов приводит к отказу всей системы.
Топологически сеть КС на магистралях – это объединение двух типов равноправных
объектов: узлов и магистралей. Узел может быть инцидентен любому числу
магистралей и наоборот (в отличие от других топологий).
60. Приведите математическое описание магистрально-модульной КС.
Магистрально-модульная КС может быть описана реберным графом.
Реберный граф Gl графа G имеет столько же вершин, сколько ребер у графа G. Ребро
между двумя вершинами графа Gl существует тогда и только тогда, когда ребра графа
G, соответствующие этим двум вершинам, смежны (т.е. инцидентны одной и той же
вершине графа G).
Магистральная сеть из n узлов и m магистралей может быть описана матрицей
инцидентности Anm ( aij 1 , если узлу i инцидентна магистраль j).
Магистральная сеть – пара конечных множеств (X,Y), X n , Y m с
установленными между этими множествами инциденциями матрицы Anm . Если
обозначить число магистралей, инцидентных i через pi (валентность узла), а число
узлов, инцидентных магистрали j – qj (валентность магистрали), то для любой (n,m)
магистрали можно записать:
p q
i
j
b
В отличие от (n,m) сети, у (n,m) магистрали всегда есть магистральная сеть с
транспонированной матрицей инцидентности.
Магистральные сети структурно эквивалентны гиперграфу. Их можно исследовать,
используя p-сеть (кёнингово представление).
p-сеть (n,m) магистральной сети G c матрицей А называют (n+m,b) сеть с матрицей
смежности:
B [
0
AT
A
]
0
B (n m)2
Yb b
p-сеть в кёнинговом представлении указывает на то, что это двудольный граф с
числом узлов x0 n , x1 m .
61. Структура магистрально-модульных КС; особенности построения структур
магистральных КС и их отличие от других типов структур компьютерных сетей?
Характерной особенностью параллельной КС является наличие в структуре
независимых модулей, которые обмениваются информацией друг с другом. Состав
модулей и их характеристики могут быть разнообразными. Наличие таких модулей
решает вопрос построения КС с высокой производительностью и памятью. В КС
стирается грань между машиной и системой.
Характеристики модулей делятся на основные и дополнительные.
Основные – числовые характеристики функции модуля (быстродействие процессора,
объём памяти). Модуль коммутатора не имеет основных характеристик.
Дополнительные – одинаковы для всех модулей (p – надёжность, c – стоимость, w –
энергопотребление).
Под основными модулями понимаются модули, влияющие на изменение
эффективности ВС. Список основных модулей определяется составом задач,
решаемых ВС и требованиями к их решению.
Под однородными понимаются модули одного наименования, имеющие одинаковые
характеристики – основные и дополнительные.
Все модули разделены на две группы: совмещаемые (для повышения надёжности
допускают аппаратное и программное резервирование (процессоры, модули обмена,
модули связи)) и несовмещаемые (допускают только аппаратное резервирование).
62. Приведите определение реберного графа и постройте граф L(G)
неориентированного графа C4.
Реберный граф Gl графа G имеет столько же вершин, сколько ребер у графа G. Ребро
между двумя вершинами графа Gl существует тогда и только тогда, когда ребра графа
G, соответствующие этим двум вершинам, смежны (т.е. инцидентны одной и той же
вершине графа G).
C4 – цикл.