экспериментальное исследование
advertisement

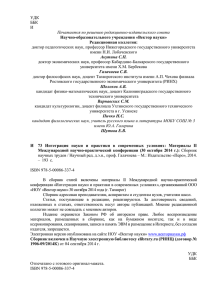
СЕКЦИЯ 5 К.А. НИКОЛЬСКАЯ Московский государственный университет им. М.В. Ломоносова nikol@protein.bio.msu.ru ТОПОЛОГИЧЕСКАЯ СЛОЖНОСТЬ СРЕДЫ КАК ДЕТЕРМИНАНТА ПОЗНАВАТЕЛЬНОГО ПРОЦЕССА: ЭКСПЕРИМЕНТАЛЬНОЕ ИССЛЕДОВАНИЕ Аннотация При обучении животных в лабиринтах различной степени сложности было установлено, что пространственная структура среды определяет не только характер проявления, но и возможность осуществления познавательного процесса. Используя параметр неопределенности выбора решения задачи НВ в качестве количественной меры сложности среды, удалось показать, что успешность обучения подчиняется правилу, сформулированному в рамках теории связи: поиск адекватного решения возможен только при таком уровне НВ, при котором обеспечивается некоторое оптимальное соотношение семантики задачи к количеству равновозможных ее маршрутных (синтаксических) реализаций. С информационной точки зрения любую проблемную ситуацию можно строго количественно оценить, если рассматривать ее как лабиринт [1], сложность которого определяется числом возможных решений задачи (в том числе и тупиковых). Понятно, что объем этих решений зависит от семантической сложности задачи (логической последовательности и числа возможных правильных решений) и конкретной топологии экспериментального пространства (маршрутных вариантов реализации задачи). Кроме того, в ситуации свободного выбора успешность решения будет детерминирована рядом психофизиологических факторов: пропускной способностью мозга [2], возможностями ЦНС [3, 4], а также такими дефинициями как мотивационная активность [5] и ее устойчивость [6], необходимые для преодоления стимульно-преградной ситуации [7]. Однако в рамках физиологии поведения внешняя среда рассматривается исключительно как источник информации о возможности удовлетворения доминирующей мотивации. Считается, что «мотивация играет преимущественную роль в подборе информации, необходимой для выработки решения к действию и получения соответствующего приспособительного эффекта» [5, с.163]. Возможно именно поэтому в экспериментальной практике предпочтение отдается поведенческим моделям, содержащим УДК 004.032.26(06) Нейронные сети 191 СЕКЦИЯ 5 лишь целевые элементы задачи, предлагаемой животному. Причем при оценке сложности используемой задачи и среды, доминирует интуитивный подход. Отсутствие количественных данных на эту тему делало весьма актуальным выяснение влияния пространственной сложности среды на успешность решения животными пищедобывательной задачи при условии, что во всех случаях семантика (4-звенная замкнутая последовательность) задачи, продолжительность пищевой депривации (20 ч) и межопытный интервал (24 ч) оставались неизменными. Л2 Л1 х А2 А1 А1 А2 х Л3 Л4 х св ободное поле P D O T C х P O D Н B=30.6 C T Н B=48.8 лабиринт A B A B Л6 Л5 х P D O C T х P O D Н B=86.2 A C T Н B=47.0 B A B Рис. 1. Схемы различных вариантов экспериментальных сред: А1, А2, А, В – подкрепляемые кормушки; С, D – ложные кормушки; Р, Т – выходы в свободное поле; О – вход в лабиринт; сплошная стрелка – вектор направления на цель, пунктирная – маршрутная реализация; заштрихованная зона – проход, который открывали на стадии стабилизации поведения; НВ – величина неопределенности выбора простого решения; х – стартовая позиция животного в начале опыта УДК 004.032.26(06) Нейронные сети 192 СЕКЦИЯ 5 В процессе исследования были изучены различные модификации сред, часть из которых представлена на рис. 1. Пространственная сложность экспериментальной среды определялась геометрической конфигурацией и числом связей (ребер) между вершинами его графа, так как число семантических элементов во всех лабиринтных средах было постоянно. В качестве меры пространственной сложности была использована величина неопределенности выбора маршрутной реализации при осуществлении двигательного навыка, которая учитывала как количество альтернативных зон в лабиринте, так и коэффициент разветвления. Полная неопределенность выбора была определена по формуле Шеннона [8]: НВ = Nk pi log 2 pi ; где pi – вероятность i-решения, Nk – допустимое число i 1 решений. Значение НВ в условиях равновероятного перехода из вершины ориентированного ребра графа в смежную для различных типов лабиринтов приведены на рис. 1. Пространственная структура внешней среды оказалась важным системообразующим фактором, определяющим направленность познавательного процесса и степень целенаправленности поведения животного на удовлетворение пищевой потребности. Высказанная Дж. Миллером [2, 9] идея о том, что познавательный процесс начинается тогда, когда объем входной информации превышает объем непосредственной памяти в нашей работе получила экспериментальное подтверждение. Исследования показали, что распознавание условий задачи в ситуации свободного выбора, как в случае простой (чередование сторон подкрепления – Л1), так и сложной (4-звенный условный рефлекс в циклической форме – Л3-Л6) задач происходило только в том случае, если объем внешней информации (число равновозможных маршрутов) превышал порог симультанного восприятия среды (рис.1). В противном случае, как, например, в модели открытого поля (Л1) или простого Т-образного лабиринта (Л3) у крыс и мышей формировалось поведение, не связанное с удовлетворением пищевой потребности. В первом случае, несмотря на знакомство со средой и с подкрепляющими кормушками, исследовательская активность к 3-му опыту полностью угашалась и поведение приобретало черты привыкания: в пределах 13 мин опыта состояние сонного торможения перемежалось грумингом. Более интересный ответ наблюдался в случае разных вариантов простого лабиринта Л3. Факт отсутствия подкрепления при повторных посещениях подкрепляемых кормушек без выхода в свободное поле (согласно условию задачи) приводил к иному «пониманию» условий задачи. Вместо многократного выполнения «свободУДК 004.032.26(06) Нейронные сети 193 СЕКЦИЯ 5 ное поле ↔ лабиринт» в пределах опыта животные к 4-6 опыту сформировали однократное посещение подкрепляемых кормушек с последующем острым угашением двигательной активности, устойчиво выполняя в дальнейшем такой навык без каких-либо признаков невротизации, несмотря на голодный фон. Поведение животных кардинально менялось как только между пищевыми отсеками в задаче на чередование мы помещали лабиринтное поле (рис.1, Л2). Факт успешного решения пищедобывательной задачи у 95, 4 % крыс и мышей уже в пределах 1-го опыта (M ± SEM = 17.8 0.03 проб у мышей ВА1В/с и M ± SEM = 21.4 0.04 проб у крыс Вистар) послужил основанием для выявления пространственных параметров, обуславливающих возникновение целенаправленности поведения. При использовании различных вариантов лабиринтных сред (Л3-Л6) было установлено, что уровень двигательной и исследовательской активностей, степень организованности поведения и направленности на пищедобывание зависели от величины НВ, и соответственно числа альтернативных зон. Положительная корреляция была установлена между значением Н В и уровнем двигательной активности. Распространенное в психофармакологии представление о том, что уровень двигательной активности животного может служить мерой исследовательской активности не получил в наших работах своего экспериментального подтверждения. Проведенные исследования показали, что зависимость успешности обучения от величины неопределенности выбора решения Н В, подчиняется правилу, сформулированному в рамках теории связи [10]: для поиска адекватного решения требуется некоторое оптимальное соотношение сигнала к шуму, при котом за минимальное время работы и при наименьшей затрате энергии может быть найдено правильное решение. Было установлено, что если зависимость двигательной активности от НВ подчинялась линейному закону типа y a bx; то исследовательская активность, и соответственно уровень интегративной деятельности обнаруживали параболическую зависимость типа y a bx cx 2 , с максимумом этих значений в области НВ = 48.8 – 77.9 (рис. 1, Л4). При значениях НВ меньших 48.8, но больших 32.0, целенаправленность сформированного пищедобывательного навыка характеризовалась неустойчивостью, а поведение сопровождалось большим количеством психо-эмоциональных проявлений, преимущественно пассивного типа (груминг, сидение). В лабиринтах со значениями НВ > 80 целенаправленность поведения резко падала, нарастали невротические проявления и при больших значениях Н В (Л5) крысы и УДК 004.032.26(06) Нейронные сети 194 СЕКЦИЯ 5 мыши после 3-го опыта в 100 % случаев отказывались от обучения. В этих условиях формирование животными высоко целенаправленного поведения было возможно только при условии постепенного увеличения Н В: Л3 → Л4 → Л5, продолжительностью в каждом не более трех дней. Используя семиотический подход [11, 12], были количественно оценены исходные объемы семантической, синтаксической (количество отсеков), прагматической информаций и их соотношения, предъявляемой животному в различных лабиринтных средах. Было установлено, что распознавание предложенной задачи и организация устойчивого целенаправленного поведения происходила только в том случае, если соотношение исходного объема значимой - сигнальной информации (семантики) к синтаксическому шуму (количеству равновозможных маршрутных решений) находилось в области значений, равных 0.3 ± 0.02. На основе проведенного нами информационного анализа высказывается представление, что обнаруженное соотношение семантики к синтактике является универсальным для осуществления познавательного (аналитико-синтетического) процесса, поскольку именно такое соотношение сигналов используется традиционно в отечественной физиологической школе при выработке некоторых видов внутреннего торможения [13], и как показано для задач с вероятностным подкреплением [14] является нижней границей, при которой может быть получен адекватный внутреннему состоянию поведенческий ответ. Не менее важную и относительно независимую роль в процессе обучения играл такой пространственный показатель как коэффициент соответствия траектории перемещения суммарному вектору направления на текущую цель. Отсутствие в структуре лабиринта (рис. 1, Л6) маршрутов, обеспечивающих условие минимизации отклонения от заданного вектора при низких значения НВ (47.0), приводило к полному подавлению познавательной деятельности животных и становилось источником серьезной невротизации, приводящей первоначально к отказу от подкрепления, а в дальнейшем и обучению. Дополнительными исследованиями было установлено, что условие, необходимое для проявления познавательной деятельности в этой ситуации, состояло в том, чтобы соответствие маршрута вектору происходило на начальном отрезке маршрута (рис. 1, Л6, светлая зона). Резкое снижение невротических проявлений наблюдалось только в том случае, если угол и время отклонения маршрута от вектора на цель не превышали определенной пороговой величины. Наличие высокого уровня хаотичности поведения и невротических проявлений свидетельствовали о том, что необходимость выполнения обходных маршрутов при решении УДК 004.032.26(06) Нейронные сети 195 СЕКЦИЯ 5 задачи может выполнять роль средового стрессорного фактора, приводящего при определенных условиях к негативным последствиям. Таким образом, результаты анализа процесса обучения животных в различных лабиринтных средах, показали, что в ситуации самоорганизации поведения (когда задача задана в неявном виде = методика свободного выбора) пространственная структура среды оказывается важным системообразующим фактором, определяющим не только характер проявления, но и возможность осуществления познавательного процесса. Оценивая структурную разветвленность среды через параметр неопределенности выбора решения задачи НВ, и используя его в качестве количественной меры пространственной сложности среды, было установлено, что возможность решения задачи и организации устойчивого целенаправленного поведения возможна только при таком уровне Н В и наличии минимизированного маршрута, при котором создаются оптимальные, достаточно контрастные условия для распознавания семантики задачи. Однако эти результаты не очень согласуются с данными, полученными в рамках эволюционной кибернетики [15]. С помощью нейросетевых алгоритмов авторами была продемонстрирова положительная корреляция между экологической сложностью среды и поведенческой сложностью. Однако уровень психофизиологических процессов в используемой простой поведенческой модели: целевая фиксация головы и глаза человека при перемещении объекта на экране, не дает основание делать столь обобщающий вывод в отношении среды и поведения, поскольку скорость координации и результативность ответа не имели отношение к познавательному процессу а, в основном, были обусловлены особенностями и возможностями процесса внимания субъекта. Несмотря на чрезвычайную активность нейросетевых исследований, посвященных проблемам обучения, ко многим выводам, как считают некоторые исследователи [16], следует пока относиться в большой осторожность, поскольку изучаются, в основном, те алгоритмы, для которых удается построить хорошие модели, а не те, которые способствуют пониманию свойств мышления. Список литературы 1. Arbib, M.A. The metaphorical brain; an introduction to cybernetics as artificial intelligence and brain theory. Wiley-Interscience, New York. 1972. 2. Miller, G.A. The magical number seven, plus or minus two: some limits on our capacity for processing information. Psychol. Rev., 1956. 63:81-97. 3. Воронин Л.Г. Физиология высшей нервной деятельности. М.: Высш. шк. 1979. 4. Крушинский Л.В. Биологические основы рассудочной деятельности. М.: Изд-во МГУ. 1977. 5. Анохин П.К. Узловые вопросы теории функциональной системы. М.: Наука, 1980. УДК 004.032.26(06) Нейронные сети 196 СЕКЦИЯ 5 6. Орбели Л.А. Лекции по вопросам высшей нервной деятельности. 1949. 7. Протопопов В.П. Исследование высшей нервной деятельности в естественном эксперименте. Киев: ГосМедИз-во.1950. 8. Шеннон Н.Э. Работы по теории информации и кибернетики. М.: Изд-во Иностр..лит., 1963. 9. Miller, G.A. (1990) Linguists, psychologists, and the cognitive sciences. Language 66:317-322. 10. Fogel L. Levels of intelligence in decision making. Ann. N-Y Acad.Sci. 1961, 89, 5:732751. 11. Смирнова ЕД. Основы логической семантики. М.: Высш.шк. 1990. 12. Черри К. О логике связи (синтактика, семантика и прагматика) // Инженерная психология. М.: Из-во Прогресс, 1964. 226-266. 13. Павлов И.П. Двадцатилетний опыт объективного изучения высшей нервной деятельности (поведения) животных. Полн. собр. соч. Т..3. 1952. 14. Меницкий ДН. Вероятностные модели адаптивного поведения. /Физиология поведения. Нейрофизиологические закономерности. Л.: Наука, 1986. 130-158. 15. Seth AK, Edelman GM. Environment and Behavior Influence the Complexity of Evolved Neural Networks. Adaptive Behavior, 2004.Vol. 12. №. 1. 5-20. 16. Редько ВГ. Эволюционная кибернетика. М.: Наука, 2001. УДК 004.032.26(06) Нейронные сети 197