На правах рукописи Загниборода Николай Анатольевич
advertisement

На правах рукописи
Загниборода Николай Анатольевич
МАТЕМАТИЧЕСКОЕ И КОМПЬЮТЕРНОЕ МОДЕЛИРОВАНИЕ
ХАОТИЧЕСКИХ КОЛЕБАНИЙ ГИБКИХ КРИВОЛИНЕЙНЫХ БАЛОК
В СТАЦИОНАРНОМ ТЕМПЕРАТУРНОМ ПОЛЕ
Специальность 05.13.18 – Математическое моделирование, численные
методы и комплексы программ
Автореферат
диссертации на соискание ученой степени
кандидата физико-математических наук
Саратов 2013
Работа выполнена в Федеральном государственном бюджетном образовательном
учреждении
высшего
профессионального
образования
«Саратовский
государственный технический университет имени Гагарина Ю.А.»
Научный руководитель:
доктор физико-математических наук,
профессор Крысько Антон Вадимович.
Официальные оппоненты: Андрейченко Дмитрий Константинович
доктор физико-математических наук,
профессор, ФГБОУ ВПО «Саратовский
государственный университет
имени Н.Г. Чернышевского», заведующий
кафедрой «Математическое обеспечение
вычислительных комплексов
и информационных систем»
Серазутдинов Мурат Нуриевич
доктор физико-математических наук,
профессор, заслуженный деятель науки
и техники Республики Татарстан,
ФГБОУ ВПО «Казанский национальный
исследовательский технологический
университет», заведующий кафедрой
«Теоретическая механика и сопротивление
материалов»
Ведущая организация:
ФГБОУ ВПО «Тверской государственный
университет»
Защита состоится «28» ноября 2013 г. в 13:00 часов на заседании
диссертационного совета Д 212.242.08 при ФГБОУ ВПО «Саратовский
государственный технический университет имени Гагарина Ю.А.» по адресу:
410054, Саратов, ул. Политехническая, 77, корп.1, ауд. 319/1.
С диссертацией можно ознакомиться в научно-технической библиотеке
ФГБОУ ВПО «Саратовский государственный технический университет имени
Гагарина Ю.А.» по адресу: 410054, г. Саратов, ул. Политехническая, 77.
Автореферат разослан «28» октября 2013 г.
Ученый секретарь
диссертационного совета
А.А. Терентьев
2
ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ
Актуальность работы. Впервые с существенными проявлениями хаоса
исследователи столкнулись в задачах гидрометеорологии, аэродинамики,
радиотехники и некоторых задачах математики. Оказалось, что линейная теория не
может объяснить наблюдаемые экспериментальные данные. Впоследствии хаос
также был обнаружен в задачах биологии, информатики, экономики, инженерии,
финансов, физики, психологии, робототехники и других научных дисциплин. Как
правило, задачам хаоса присуща существенная вычислительная сложность,
поэтому чаще всего рассматриваются системы с одной или несколькими
степенями свободы. Вместе с тем многие механические системы, в частности
системы балок, имеют распределенные структуры, соответствующие множеству
степеней свободы. Такие математические модели описываются существенно
нелинейными дифференциальными уравнениями в частных производных.
Решению задач нелинейной динамики балок, пластин и оболочек посвящены
работы U. Nackenhorst, J. Awrejcewicz, S. Smale, A. F. Vakakis, M. Amabili, A. Sarkar,
O.Thomas, C.Touze, S. Bilbao, N. Mordant, A. Boudaoud, O. Cadot, N. Yokoyama,
M. Takaoka, Y. Wang, H. Qiang, H. Haiyan, Y. Guitong, U. Lepik, W. Pietraszkiewicz,
Van der Heijden, K. Nagai, S. Maruyama, M. Oya, T. Yamaguchi, Y. Tsuruta, T. Murata,
В.В. Болотина, А.С. Вольмира, Э.И. Григолюка, Б.Я. Кантора, Ю.Г. Коноплева, А.Н.
Куцемако, В.А. Крысько, А.В. Крысько, И.Ф. Образцова, Н.М. Агамирова, В.Г.
Баженова, Т.В. Вахлаевой, П.С. Ланда, Н.Ф. Морозова, В.А. Бабешко,
В.Б. Байбурина. Исследованием сложных колебаний балок с применением вейвлетанализа занимались О.А. Салтыкова, И.В. Папкова, В.В. Солдатов. В их работах
основной упор делается на исследование гибкой балки, различных её моделях,
взаимодействии с другими объектами. Моделирование гибких криволинейных балок
освещено недостаточно. Работы по моделированию гибких криволинейных балок в
стационарном температурном поле практически отсутствуют.
Цель и задачи работы. Целью диссертационной работы является
исследование хаотической динамики гибких балок, гибких криволинейных балок и
гибких криволинейных балок в стационарном температурном поле под действием
внешней периодической нагрузки.
Для достижения этой цели были решены следующие задачи:
– разработаны математические модели гибкой балки, гибкой криволинейной
балки и гибкой криволинейной балки в стационарном температурном поле с
применением гипотез Эйлера-Бернулли;
– разработан и реализован в программном комплексе численный метод,
моделирующий хаотическую динамику исследуемых объектов;
– разработаны и реализованы в программном комплексе новые алгоритмы
анализа хаотической динамики на области управляющих параметров,
позволяющие определять области выполнения гипотез по прогибам, зоны упругих
и пластических деформаций, режимы колебаний, показатели Ляпунова,
нелинейный отклик системы на линейное воздействие по внешней нагрузке;
– усовершенствован процесс постановки вычислительного эксперимента:
осуществлена интеграция алгоритмов анализа сигналов среды MATLAB в
вычислительный комплекс, реализована поддержка многопроцессорных систем,
разработана система распределенных вычислений.
3
Методы исследования. В диссертационной работе использованы методы
нелинейной динамики, вычислительной математики, качественной теории
дифференциальных уравнений, Фурье и вейвлет-анализа, процедуры анализа
показателей Ляпунова. Программный комплекс реализован с использованием
принципов
процедурного,
структурного
и
объектно-ориентированного
программирования.
Достоверность
и
обоснованность
полученных
результатов
обеспечиваются корректной физической и математической постановкой задачи, а
также сравнением результатов, полученных разными методами: методом конечных
разностей, методом конечных элементов, методом Бубнова-Галеркина в высших
приближениях и методом Рунге-Кутта 4-го и 6-го порядков точности, в
совокупности с применением методов качественной теории дифференциальных
уравнений и нелинейной динамики. Результаты моделирования гибкой балки
совпадают с результатами моделирования, проведенными в предшествующих
работах. Кроме того, было проведено исследование влияния ряда параметров на
точность моделирования.
Научная новизна работы заключается в следующих новых результатах:
1. Предложен метод математического моделирования и построены
математические модели, учитывающие кривизну гибкой балки и стационарное
температурное поле.
2. Разработаны алгоритмы и программный комплекс, обеспечивающий
моделирование пространственно-временного хаоса гибкой балки, гибкой
криволинейной балки и гибкой криволинейной балки в стационарном
температурном поле.
3. Разработаны алгоритмы и программное обеспечение для анализа
колебательного процесса, которое позволяет определить зоны выполнения гипотез
по допустимым прогибам, зоны упругих и пластических деформаций, а также
позволяет строить карты режимов колебаний, карты расхождения траекторий,
карты показателей Ляпунова. Произведено сравнение карт между собой. Ввиду
большой вычислительной сложности в программном комплексе потребовалось
реализовать систему распределенных вычислений, использующую потенциал
многопроцессорных систем, и реализующую автоматическое масштабирование
вычислительных мощностей.
4. Произведено исследование сходимости получаемых результатов от ряда
параметров
моделирования
(количество
точек
модели,
длительность
моделирования), установлены их оптимальные значения по критериям точности и
затратам машинного времени. Подтверждена сходимость карт режимов колебаний
в зависимости от используемого метода решения системы дифференциальных
уравнений (методы Рунге-Кутта 4-го и 6-го порядков точности). Точность анализа
значительно превосходит предыдущие работы в этой области (в 3 раза по
количеству точек модели и в 2 раза по времени моделирования).
5. Показано, что хаотическая динамика изучаемых моделей при
симметричных граничных условиях похожа. При жесткой заделке на обоих концах
система имеет больше гармонических областей колебаний, однако, в общем виде
динамика такая же, что и при симметричном креплении на жестких шарнирах.
Несимметричные граничные условия приводят к значительному сокращению
области гармонических колебаний и увеличению области хаотических колебаний.
4
6. Показано, что увеличение кривизны балки положительно влияет на
область гармонических колебаний, при этом наблюдается резкая граница
динамической потери устойчивости, увеличивается область упругих деформаций,
балка становится более устойчивой к внешней нагрузке.
7. Исследована хаотическая динамика гибкой криволинейной балки в
стационарном температурном поле. Показано, что температурное поле может
увеличивать зоны гармонических колебаний и понижать хаотическую динамику за
счет изменения геометрической кривизны балки.
Практическая ценность и реализация результатов
Практическая ценность заключается в разработанном программном
комплексе, позволяющем моделировать хаотическую динамику описанных
распределенных систем с учетом разных вариантов статического и динамического
нагружения, различных параметров окружающей среды и разных типов граничных
условий. Выявлены причины появления несимметричных форм колебаний при
использовании описанного метода моделирования для задач с симметричными
граничными условиями и симметричным внешним воздействием. Комплекс также
позволяет анализировать границы применимости математической модели,
определять режимы колебаний системы, фиксировать нелинейный отклик системы
на линейное изменение управляющего параметра и анализировать степень её
хаотичности через показатели Ляпунова. Численные эксперименты, проведенные в
рамках данной работы, позволяют указать те наборы управляющих параметров,
при которых исследуемые структуры находятся в зоне безопасной работы.
Полученные результаты могут быть использованы как в области механики, так и в
различных приборах электроники и гироскопии (микроэлектромеханических
системах для определения движения объекта, его скорости, измерения ускорения,
угловых скоростей, давления, скорости потока жидкости или газа, температуры и
влажности).
Результаты диссертации были получены при финансовой поддержке и
использованы при выполнении грантов: ФЦП «Научные и научно-педагогические
кадры инновационной России» на 2009-2013 годы, проект 2012-1.4-12-000-1019,
мероприятие 1.4 «Поддержка развития внутрироссийской мобильности научных и
научно-педагогических кадров путем выполнения исследований молодыми
учеными и преподавателями в научно-образовательных центрах»; РФФИ 12-0800569-a, «Построение математической модели гироскопа с распределенной массой
с большой амплитудой осцилляторов»; НИР СГТУ-12 «Математическое
моделирование осцилляторов с большой амплитудой колебаний для приборов
навигации»; НИР СГТУ-15 «Исследование нелинейных стохастических колебаний
многослойных механических структур в температурном поле под действием
концентрированных потоков энергии».
Получены 4 свидетельства о государственной регистрации программ для
ЭВМ.
Основные результаты и положения, выносимые на защиту:
1. Предложенный метод математического моделирования и построенные
конкретные математические модели, обеспечивающие исследование хаотической
динамики гибких балок, гибких криволинейных балок и гибких криволинейных
балок в стационарном температурном поле.
2. Разработанные алгоритмы и программное обеспечение для исследования
пространственно-временного хаоса распределенных механических систем в виде
5
балочных структур с учетом геометрической нелинейности как для отдельно
численного эксперимента, так и на области управляющих параметров.
3. Произведено исследование сходимости получаемых результатов от ряда
параметров моделирования. Определены их оптимальные значения. Изучено
влияние различных типов граничных условий и геометрической кривизны балки
на хаотическую динамику гибкой криволинейной балки.
4. Исследована хаотическая динамика гибкой криволинейной балки в
стационарном температурном поле.
Апробация работы
Основные положения и результаты диссертации представлялись на XVIII
Международной научной конференции студентов, аспирантов и молодых ученых
«Ломоносов» (Москва, МГУ, 2011); 11th CONFERENCE on «Dynamical SystemsTheory and Applications» (Łódź, POLAND, 2011); VIII международной конференции
«Проблемы прочности материалов и сооружений на транспорте» (СанктПетербург, 2011); заочной научно-практической конференции «Теоретические и
прикладные проблемы науки и образования в 21 веке» (Тамбов, 2012).
Часть материалов диссертации докладывалась на кафедре «Сопротивление
материалов и основы теории упругости» профессора Каюмова Р.А. Казанского
государственного архитектурно-строительного университета (Казань, 2012). В
законченном виде диссертация докладывалась на кафедре «Автоматика и
биомеханика» технического университета Лодзи (Польша, 2013) фул профессора
Яна Аврейцевича, на научных семинарах кафедры «Математика и моделирование»
Саратовского государственного технического университета имени Гагарина Ю.А.
под руководством заслуженного деятеля науки и техники РФ, д.т.н., профессора
В.А. Крысько (Саратов, 2013); на межкафедральном семинаре «Математическое
моделирование, численные методы и комплексы программ» Саратовского
государственного технического университета имени Гагарина Ю.А. под
руководством заслуженного деятеля науки РФ, д.ф.-м.н., профессора
В.Б. Байбурина (Саратов, 2013).
Публикации.
Основное содержание и результаты диссертации
опубликованы в 15 работах, в том числе 5 статей в рецензируемых журналах из
перечня ВАК РФ и 3 статьи в иностранных источниках. Список основных работ
автора, отражающих существо диссертационной работы, приведен в конце
автореферата.
Объем и структура работы. Диссертация состоит из введения, 4 глав,
заключения и списка использованной литературы. Работа содержит 133 страницы,
12 рисунка, 66 таблиц. Список использованной литературы включает 120
наименований.
СОДЕРЖАНИЕ РАБОТЫ
Во введении обоснована актуальность диссертационного исследования,
приведен краткий исторический обзор результатов, сформулирована цель работы,
приводится краткое содержание диссертации.
В первой главе строится математическая модель гибкой балки ЭйлераБернулли (рис. 1), приводятся основные гипотезы.
Рассматриваются гибкие однослойные, тонкие балки с длиной a и высотой
h . Балка нагружается распределенной по ее поверхности нагрузкой q ( x, t ) ,
действующей в направлении нормали к серединной поверхности.
6
Построенная математическая модель балки основывается на следующих
гипотезах:
любое поперечное сечение, нормальное к серединной поверхности до
деформации, остается после деформации прямым и нормальным к серединной
поверхности, вместе с тем высота сечения не изменяется;
инерция вращения элементов балки не учитывается, однако учитываются
силы инерции, отвечающие за перемещения вдоль нормали к серединной
поверхности;
внешние силы не меняют своего направления при деформации балки;
геометрическая нелинейность учитывается в форме Т. Кармана.
Приведенные выше гипотезы
основаны на идеях Эйлера-Бернулли,
и
считаются
математической
моделью первого приближения, но
она является достаточно точной для
возможности анализа.
В прямоугольной системе
Рис. 1. Гибкая балка Эйлера-Бернулли
координат
двумерная
область,
соответствующая схеме на рис. 1, запишется в виде
{x, z | ( x, z ) [0; a] [h / 2; h / 2]}, 0 t .
Гибкая балка находится под действием внешней периодической нагрузки
q q0 sin( p t ) , где q 0 – амплитуда нагрузки, p – частота внешнего возбуждения.
Математическая модель балки описывается системой нелинейных
дифференциальных уравнений в частных производных. Эти выражения
представляют собой уравнения движения элемента балки с учетом диссипации
энергии, записанные в перемещениях и в безразмерном виде:
1
2
2u
2u
L
(
w
,
w
)
0,
3
x 2
t 2
1 4w
2w
w
L
(
u
,
w
)
L
(
w
,
w
)
q
0,
1
2
4
2
t
t
12 x
(1)
3 w 2 w
2u w u 2 w
w 2 w
L
(
w
,
w
)
L1 (u, w) 2
L
(
w
,
w
)
;
;
;
2
3
2 x x 2
x x x x 2
x x 2
где L1 (u, w) , L2 (w, w) , L3 ( w, w) – нелинейные операторы, w( x, t ) – прогиб элемента в
2
направлении нормали; u ( x, t ) – перемещение элемента в продольном направлении;
– коэффициент диссипации; E – модуль Юнга; h – высота поперечного сечения
балки; a – длина балки; – удельный вес материала; g – ускорение свободного
падения; t – время; q q0 sin( pt ) – внешняя нагрузка.
Безразмерные параметры введены следующим образом:
a
a
w
ua
x
t
; w ; u 2 ; x ; t ; ; p
h
a
h
h
p
Eg
;
qa 4
a
;q 4 .
h E
p
(2)
Черточка над безразмерными параметрами в уравнении (1) для простоты опущена.
К уравнениям системы (1) следует присоединить одно из граничных условий
1) оба конца балки имеют жесткую заделку ( x 0 , x a )
w(0, t ) w(a, t ) u(0, t ) u(a, t ) w' x (0, t ) w' x (a, t ) 0 ;
(3)
2) оба конца балки закреплены шарнирно-неподвижно ( x 0 , x a )
7
w(0, t ) w(a, t ) u(0, t ) u(a, t ) w' ' xx (0, t ) w' ' xx (a, t ) 0 ;
(4)
3) один конец имеет жесткую заделку ( x 0) , а другой – шарнирно-неподвижен
( x a)
w(0, t ) w(a, t ) u(0, t ) u(a, t ) w' x (0, t ) w' ' x (a, t ) 0 ;
(5)
4) один край имеет жесткую заделку ( x 0) , а другой свободен ( x a)
w(0, t ) w' x (0, t ) u (0, t ) 0 ;
M x (a, t ) N x (a, t ) Qx (a, t ) 0 ; M x (a, t ) N x (a, t ) Qx (a, t ) .
и начальные условия:
(6)
( x,0) u ( x,0) u ( x,0) 0. .
w( x,0) w
(7)
Для сведения системы уравнений в частных производных к системе
обыкновенных
дифференциальных
уравнений
относительно
временной
координаты используются конечноразностные аппроксимации, применяя
разложение в ряд Тейлора в окрестности точки xi . GN 0 xi 1, xi i N , i 0..N –
сеточная область. Разностные операторы при аппроксимации O(c 2 ) , где c – шаг по
пространственной координате имеют следующий вид: x (i ) () i 1 () i 1 2c ,
x (i ) ()i1 2()i ()i1 c 2 , x (i ) ()i2 ()i1 6()i ()i1 ()i2 c 4 .
Тогда дифференциальные уравнения системы (1) в частных производных
сводятся к обыкновенным дифференциальным уравнениям второго порядка по
временной координате:
2
4
u x 2 (ui ) x ( wi ) x 2 ( wi ),
1
3
2
w
2
t wt 12 x 4 ( wi ) x 2 (ui ) x ( wi ) x 2 ( wi ) x (ui ) 2 x ( wi ) x 2 ( wi ) q
(8)
Полученная система обыкновенных дифференциальных уравнений второго
порядка (8) с соответствующими граничными и начальными условиями,
записанными после применения конечно-разностной аппроксимации второго
порядка точности, методом замены переменных сводится к системе обыкновенных
дифференциальных уравнений первого порядка, которая решается методом РунгеКутта 4-го или 6-го порядков точности.
Было произведено сравнение результатов моделирования для приведенного
метода (сравнивались полученные сигналы, анализировались частоты колебаний
на спектре мощности Фурье, 2-d и 3-d вейвлетах Морле), и сделан вывод, что
имеется сходимость результатов, полученных методом конечных разностей и
методом конечных элементов. Алгоритм МКЭ более трудоемкий по сравнению с
алгоритмом МКР, причем время, затраченное для решения одного варианта задачи
по МКЭ, больше, чем при решении по МКР. Поэтому для дальнейших
исследований хаотических колебаний балок был принят МКР.
Основными инструментами при исследовании колебаний отдельно взятого
сигнала были: спектр мощности Фурье, фазовый портрет, модальный портрет,
автокорреляционная функция, псевдо-сечение Пуанкаре, 2-d и 3-d вейвлеты
Морле, а также эпюра прогиба балки во времени. Однако, в соответствии с идеями
А. Пуанкаре анализ отдельно взятых задач является недостаточным, поэтому в
работе проводится изучение большого множества задач на области управляющих
параметров. Для анализа колебаний на области управляющих параметров { p , q0 }
в предшествующих работах использовалась карта режимов колебаний. Карты
режимов колебаний отражают характер нелинейного динамического процесса,
8
позволяя ориентироваться в пределах исследуемых зон. Оптимизированный по
производительности программный комплекс позволил провести исследование
влияния оптимального числа ( n ) узлов сетки по пространственной координате,
которая накладывается на исследуемую конструкцию, и количества разбиений
интервала частоты ( p ) возбуждающей силы и величины внешней нагрузки ( q0 )
n1 n2 .
В табл. 1 приведены условные обозначения режимов колебания балки для
построенных карт зависимости характера колебаний от управляющих параметров
p ,q0 при количестве разбиений по пространственной координате n 40 и
n 120 (табл. 2). Для строки a) сетка, накладываемая на область управляющих
параметров n1 n2 равна 75 50 точек, b) 300 200 соответственно.
Таблица 1
n 40
n 80
n 120
Таблица 2
a)
b
)
Таким образом, для дальнейших исследований, посвященных изучению
сложных колебаний распределенных систем, определены следующие оптимальные
параметры моделирования:
метод сведения уравнений в частных производных к задаче Коши – МКР
второго порядка точности;
разрешение карты характера колебаний n1 n2 равняется 300 200 точек
(время счета такой карты на ЭВМ (Intel® Core™ i5 2500) составляет 98 часов ,
вычисления проводились параллельно на всех четырех ядрах процессора );
число разбиений по пространственной координате – n 120 .
Возникает также вопрос, достаточно ли точно решается задача Коши методом
Рунге-Кутта 4-го порядка. Для ответа на данный вопрос рассмотрим решение
шарнирно-неподвижно опертой балки методом Рунге-Кутта 6-го порядка точности
(метод Бутчера). Ранее такое исследование было проведено для отдельно выбранных
сигналов, выводы о сходимости экстраполировались на всю область управляющих
параметров. В табл. 3 проводится сравнение методов с параметрами моделирования:
9
n 80 ,
50 ,
1;
на
области
управляющих
параметров: p [0 ; 10.35) ,
q0 [0 ; 2 10 ) . Анализ этой таблицы позволяет сделать вывод, что результаты,
5
полученные при решении задачи Коши методами Рунге-Кутта 4-го и 6-го порядка,
практически одни и те же, но время счета карт, приведенных в табл. 3 методом РунгеКутта 6-го порядка точности, больше практически в 2 раза. Поэтому в дальнейших
расчетах предпочтение отдается методу Рунге-Кутта 4-го порядка.
Таблица 3
Рунге-Кутта 4-го порядка точности
Рунге-Кутта 6-го порядка точности
При изучении сложных колебаний гибких балок Эйлера-Бернулли под
действием симметрично прикладываемой поперечной периодической нагрузки для
симметричных граничных условий возникает несимметричное решение. Было
определено, что появление несимметричных форм колебаний в таких условиях
вызвано погрешностью применения метода Рунге-Кутта, связанного с тем, что
приближение к «идеальному» решению на разных половинах балки (относительно
центра) осуществляется «сверху» и «снизу» и со временем накапливается
существенное различие. Особенно сильно это явление наблюдается при
хаотических колебаниях. Увеличение количества точек разбиения области x 0; 1
и смена метода Рунге-Кутта 4 на 6-й порядок точности не оказывает влияния на
результат моделирования. В данном случае важен сам факт асимметрии в решении
на каждом шаге.
Таблица 4
n
12
0
Несимметричная система уравнений
Симметричная система уравнений:
Аналогичного эффекта можно достичь искусственной подачей на половины
симметричные относительно центра балки нагрузок, отличных на крайне малую
величину. Для получения корректного решения следует учитывать присутствие
10
симметрии (необходимо полное совпадение решений на левой и правой части
исследуемой области). Этого можно добиться отображением на каждом шаге
моделирования одной половины области на другую с требуемыми знаками.
В табл. 4 приведены карты режимов колебаний для симметричного и
несимметричного метода решения системы уравнений.
В табл. 5 приведены карты характера колебаний с управляющими
параметрами n 120 , p [0 ; 10.35) , q0 [0 ; 2 105 ) для разных типов крепления
балки (шарнирное защемление с обоих концов, глухая заделка с обоих концов,
шарнирное защемление с одной стороны и глухая заделка с другой) и разной
толщины балки ( 50 и 100 ). Из приведенной табл. 5 видно, что для
симметричных типов крепления, при малых и средних частотах режимы
колебаний в значительной мере совпадают. Для несимметричного крепления по
типу шарнир-заделка сходство с симметричными типами наблюдается лишь при
малых частотах. Также можно заметить, что несимметричный тип крепления
способствует увеличению областей с хаотическим режимом колебаний. С
уменьшением толщины балки область гармонических колебаний существенно
увеличивается.
Таблица 5
а) Шарнир-шарнир
б) Заделка-заделка
с) Шарнир-заделка
50
10
0
Кроме режима колебаний балки, нас также интересует ряд количественных
характеристик колебательного процесса. Так, существенную ценность имеет карта
предельных прогибов, с её помощью можно определить области выполнения
гипотез по предельно допустимым прогибам. Для её построения у каждого сигнала
определяется максимальный по модулю прогиб за весь период моделирования. В
табл. 6 a) приведена карта предельных прогибов. Черный цвет соответствует
минимальному прогибу, белый – максимальному, градации серого отражают
промежуточные значения. Зеленый цвет отражает области, где результат
моделирования не определен (решения системы уравнений не существует).
Другой важной характеристикой является предельное растяжение, которому
подвергается криволинейная балка. Для построения карты предельных растяжений
в каждом эксперименте определяется максимальное растяжение гибкой балки.
Данная характеристика позволяет выявить зоны упругопластических деформаций.
Так, если ввести относительное удлинение балки a1 a / a , то закон Гука в
11
относительных единицах примет вид E , где E – модуль упругости. Зная
предельные деформации для конкретных материалов, можно построить карты с
зонами упругопластических деформаций. В таблице 6 b) приведена карта с зонами
упругопластических деформаций для термически упрочненного алюминия 1915Т
(данный материал был выбран из-за высокого порога пластических деформаций,
max 195 МПа) Белая зона – зона пластических деформаций, градации серого
цвета и черный цвет – зоны упругих деформаций. Зеленый цвет отражает области,
где результат моделирования не определен (решения системы уравнений не
существует).
Таблица 6
b) min( ) 1 , max( ) 1,002785 .
a) min 0 , max 5 .
При разработке математической модели использовался ряд гипотез. Одна из
гипотез предполагает предельные допустимые прогибы в размерах 5-6 единиц от
толщины балки. Ограничение предельных прогибов позволит определить область
применения данной математической модели. Анализ результатов моделирования
за пределами области определения имеет исключительно теоретическую ценность.
Результатом качественного исследования большого объема задач стала
~ –
карта расхождения сигналов. Она строится следующим образом. Пусть wi и w
i
~
последовательности прогибов для сигналов w и w соответственно. Если
M
~ , где M –
определить расстояние между сигналами по формуле S i1 wi w
i
количество точек в сигнале, то результатом будет скалярная величина,
характеризующая расхождение или различие рядов между собой. Чтобы не
работать с абстрактной величиной (расстояние между рядами), перейдем к
M
~ / M . Результатом вычислений будет среднее расстояние (в
формуле S i1 wi w
i
~ . Если расстояние стремится к нулю, то
прогибах) между точками рядов w и w
~ , если расстояние равно нулю – это один и тот же
сигнал w сходится к сигналу w
сигнал.
При равномерном увеличении внешней нагрузки расхождение между двумя
соседними траекториями позволяет фиксировать линейный или нелинейный
отклик гибкой балки (системы уравнений). Зависимость строится для нагрузки, так
как она отвечает за энергию, поступающую в систему. Построение зависимости
для частоты затруднено по двум причинам: 1) частота отвечает за режим или
способ передачи энергии в систему (это качественно другая система) 2) в формулу
нагрузки частота входит под тригонометрической функцией (заведомо нелинейная
зависимость). Таким образом, при построении карты осуществляется проход по
12
вертикали (снизу и вверх), текущий сигнал сравнивается с предыдущим,
фиксируется расхождение.
В табл. 7 для сравнения приведены карты режимов колебаний и
расхождения траекторий (черный цвет – расхождение выше максимума, градации
серого – расхождение ниже максимума и выше минимума, белый цвет – минимум
расхождения, зеленый цвет – результат моделирования не определен, минимум
равен 0, максимум равен 0,5). В общем случае области с черным цветом
характеризуются непредсказуемым откликом на незначительное увеличение
нагрузки. Области с белым цветом, напротив, отражают предсказуемость
динамики, траектории колебательного процесса в соседних точках расходятся
незначительно и в общем виде совпадают.
Таблица 7
Карта режимов колебаний
Карта расхождения траекторий
Карта режимов колебаний и карта расхождения сигналов взаимосвязаны и
отлично дополняют друг друга. Карта расхождения сигналов позволяет
существенно упростить качественный анализ сценариев перехода системы в хаос.
Для наглядного отображения карты расхождения сигналов максимум определяется
эмпирически.
Совершенно новой разработкой является карта показателей Ляпунова. Для
определения показателей Ляпунова в общем случае существуют два алгоритма:
алгоритм Бенеттина и алгоритм Вольфа. Алгоритм Бенеттина для вычисления
показателей требует наличия линеаризованной системы уравнений. Её
аналитическое получение для исследуемых систем весьма затруднительно, поиск
численными методами накладывает значительные издержки по времени
вычислений и делает невозможным построение карты. Алгоритм Вольфа для
вычисления показателей требует только решение системы дифференциальных
уравнений. По совокупности этих причин для построения карты показателей был
выбран алгоритм Вольфа.
Траектория движения точки балки описывается системой из 4
дифференциальных уравнений, поэтому рассматриваются 4 показателя Ляпунова.
В табл. 8 для сравнения приведены карта режимов колебаний и карта показателей
Ляпунова. В табл. 9, карта показателей приведена в разборе. В табл. 10 приведены
цветовые обозначения для этой карты. Чем больше положительных показателей
Ляпунова определено, тем хаотичней ведет себя система.
Сравнение карты режимов колебаний с картой показателей Ляпунова
показывает эффективность обоих видов анализа: по частотам спектра и по
хаотической динамике. Важным наблюдением является то, что практически все
13
гармонические колебания наблюдаются на областях с отрицательными
показателями Ляпунова, комбинация независимых частот наблюдается на
Таблица 8
Карта режимов колебаний
Карта показателей Ляпунова
Таблица 9
Карта показателей Ляпунова
4 отрицательных показателя
(гармонические колебания)
3 отрицательных,
1 положительный показатель
(хаос)
2 отрицательных,
2 положительных показателя
(хаос-гиперхаос)
1 отрицательный, 3
положительных показателя
(хаос-гипергиперхаос)
4 положительных показателя
(глубокий хаос)
Таблица 10
4 отрицательных показателя
(гармонические колебания)
2 отрицательных, 2 положительных
показателя (хаос-гиперхаос)
4 положительных показателя
(глубокий хаос)
3 отрицательных, 1 положительный
показатель (хаос)
1 отрицательный, 3 положительных
показателя(хаос-гипер-гиперхаос)
Результат моделирования не определен
(распад решения)
областях с не более чем одним положительным показателем. Важно отметить, что
явления хаоса получали многие исследователи, явление хаос-гиперхаос было
получено в работе А.С. Дмитриева и В.Я. Кислова «Стохастические колебания в
радиофизике и эелектротехнике» (Наука 1989 г.) в задачах радиотехники. Режимы
хаос-гиперхаос, хаос-гипер-гиперхаос впервые были определены в исследованиях
14
В.А. Крысько и Г. Наркайтиса, и подтверждены в этой работе. Кроме того,
впервые найдено состояние системы – глубокий хаос. В таблице 10 представлены
области с каждым режимом колебаний по отдельности и все слои в сборе в виде
карты показателей Ляпунова.
Вторая глава посвящена математическому моделированию криволинейных
балок (рис. 2).
Рассматриваются
гибкие
однослойные,
тонкие
криволинейные балки с длиной a ,
высотой
и геометрической
h
кривизной k x 1 Rx , где Rx – радиус
кривизны.
Балка
нагружается
распределенной по ее поверхности
нагрузкой q ( x, t ) , действующей в
Рис. 2. Гибкая криволинейная балка
Эйлера-Бернулли
направлении нормали к серединной
поверхности балки (рис. 2). Используется тот же набор гипотез, что и в случае с
гибкой балкой Эйлера-Бернулли. Система дифференциальных уравнений в
безразмерном виде выглядит следующим образом:
1
2
2u
w
2u
k
L
(
w
,
w
)
0,
x
3
x
x 2
t 2
2
1 4 w
u
1 w
2w
2w
w
k
k
w
w
L
(
u
,
w
)
L
(
w
,
w
)
q
1
0.
x
x
1
2
4
2
2
2 x
t
x
t
12 x
x
(9)
В табл. 11 для сравнения приведены карты режимов колебаний с
параметрами криволинейной балки n 120 , 100 , 1 1 , с кривизной k x 0,12,48
соответственно (при k x 0 речь идет об обычной балке).
Таблица 11
kx 0
k x 48
k x 12
Таблица 12
kx 0
k x 48
k x 12
15
Как видно из приведенных карт, увеличение кривизны балки приводит к
увеличению области с гармоническими колебаниями. Повышается жесткость
конструкции, что сказывается на увеличении зоны гармонических колебаний.
В табл. 12 приведены карты предельных прогибов (максимум равен 5
единицам).
Увеличение кривизны балки приводит к уменьшению области
применимости математической модели. Кроме того, граница применимости
становится четко различимой, что говорит о резкой смене режима колебаний,
наблюдается динамическая потеря устойчивости.
В табл. 13 приведены карты расхождения сигналов (срез по 0,25 единииц
среднего прогиба расхождения). Данные карты позволяют обнаружить зоны
динамической потери устойчивости. Увеличение кривизны балки приводит к
увеличению областей, в которых наблюдается динамическая потеря устойчивости.
Таблица 13
kx 0
k x 48
k x 12
В табл. 14 приведены карты показателей Ляпунова. Как видно из
приведенных карт, увеличение кривизны балки приводит к расширению области с
предсказуемой динамикой (четыре отрицательных показателя), при этом после
потери динамической устойчивости колебательный процесс может перейти в
глубокий хаос, не свойственный колебаниям без кривизны или с малой кривизной.
Таблица 14
kx 0
k x 48
k x 12
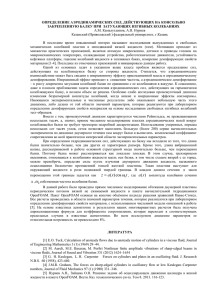
Третья глава посвящена математическому моделированию гибких
криволинейных балок в стационарном температурном поле.
Гибкие криволинейные балки в последнее время начинают применяться в
приборостроении.
В
частности,
в
гироскопических
приборах
–
микроэлектромеханических системах (МЭМС-датчики), что приводит к
необходимости
анализа
сложных
колебаний с учетом стационарного
температурного поля.
Рассматривается тот же набор
Рис. 3. Стационарное температурное поле
гипотез, что и в случае криволинейной
16
балки, но добавляется в рассмотрение стационарное температурное поле.
Гипотезы и допущения относительно свойств материала, принятые для
моделирования теплопроводности твердого тела. 1) Тело состоит из
изометрических поверхностей, причем в каждой точке такой поверхности
температура одинакова. Поверхности могут располагаться любым образом, но не
могут пересекаться. 2) Изотропность тела. Свойства и структура тела во всех
направлениях одинаковы. 3) Стационарное поле. Рассматривается случай
установившейся температуры.
Уравнение теплопроводности в частных производных с учетом
вышеизложенных гипотез и допущений для двумерного тела имеет вид
2T 2T
,
x 2 z 2
где T T ( x, z ) – температура; x и z – пространственные координаты. Для
2T
температурного
поля рассматривались граничные условия первого рода:
T ( x, z ) 300 C при z 1 / 2 , 0 x 1 ; T ( x, z ) 0 C при z 1/ 2 , 0 x 1 ; T ( x, z ) 0
C при x 0 , 1/ 2 z 1/ 2 , T ( x, z ) 0 C при x 1 , 1/ 2 z 1/ 2 (Рис 3.).
Уравнение решается методом граничного элемента.
Дифференциальные уравнения, описывающие динамику системы в
безразмерном виде, имеют вид
N xT
2u
L
(
w
,
w
)
u 1u
3
x 2
x
(10)
2
u
2 w
1
1 w
1 4w
k
k
w
w
L
(
w
,
u
)
L
(
w
,
w
)
q
x
x
1
2
2
4
2
12 x
2 x
x
x
(11)
w T 2 M xT
2 w ,
Nx
w
2
x x
x
где N xT ( N xT a 2 ) ( Eh 3 ) –перемещения элемента балки, вызванные температурным
полем; M xT ( M xT a) ( Eh 2 ) – моменты элемента балки, вызванные температурным
полем.
К уравнениям (10)-(11) следует присоединить граничные условия (3)-(6) и
полученное температурное поле.
Таблица 15
T ( x, z ) 0 C
T ( x, z ) 300 C
Карты режимов колебаний для гибкой криволинейной балки в стационарном
температурном поле (параметры моделирования n 120 , k x 0 , 100 , тип
17
граничных условий – шарнирно-неподвижное опирание с одной стороны и
жесткая заделка – с другой) приведены в табл. 15. Из них видно, что в
приведенной постановке задачи поле оказывает положительное влияние на
хаотическую динамику – увеличиваются области гармонических колебаний. Это
объясняется тем, что оно приводит к искривлению балки, что повышает жесткость
конструкции.
С применение данной математической модели была разработана
математическая модель гибкой криволинейной балки в стационарном
температурном поле с учетом электрического поля. На поверхности балки
находился электропроводящий слой, способствующий появлению электрического
поля. Исследования показали, что для несвязанной задачи (без учета влияния
электрического поля на температурное поле) влиянием электрического поля на
хаотическую динамику можно пренебречь.
В четвертой главе описывается разработанный программный комплекс. Он
был реализован на базе программной платформы «.NET Framework» компании
Microsoft на языке объектно-ориентированного программирования C#. Часть
алгоритмов анализа и построения получаемых данных была разработана в пакете
прикладных программ MATLAB (R2012а) на одноименном языке и интегрирована
в программный комплекс через динамически подключаемые библиотеки.
Распределенная система вычислений была разработана с использованием
технологии создания веб-приложений и веб-сервисов ASP.NET от компании
Microsoft. Средой разработки служила Microsoft Visual Studio 2010 Express Edition
(Visual C# Express и Visual Web Developer Express).
Программный комплекс состоит из двух независимых частей: комплекс для
качественного анализа вычислительного эксперимента и комплекс для
количественного анализа множества экспериментов на области управляющих
параметров. Так, при проведении отдельного взятого вычислительного
эксперимента комплекс позволяет в автоматизированном режиме строить: спектр
мощности Фурье, 2-d и 3-d вейвлеты Морле, псевдосечение Пуанкаре, фазовые и
модальные портреты, автокорреляционную функцию, траекторию выбранной
точки балки, эпюру прогиба и эпюру прогиба балки во времени.
Распределенная система вычислений делится на три уровня:
вычислительный процесс, менеджер процессов и сервер распределенных
вычислений. Менеджер процессов запускается на клиентской машине. Он отвечает
за обращение к серверу вычислений (получение задач, передача полученных
данных), управление вычислительными процессами (запуск, передача задания,
получение результатов вычислений). Вычислительный процесс осуществляет
проведение численного эксперимента. Сервер вычислений производит сохранение
результатов вычислений и распределение задач.
В
заключении
кратко
сформулированы
основные
результаты
диссертационной работы
ОСНОВНЫЕ ВЫВОДЫ ПО РАБОТЕ
1. Построена математическая модель и развит метод, на основе которых
создан программный комплекс по изучению пространственно-временного хаоса
распределенных механических балочных структур.
18
2. Разработана кроссплатформенная система распределенных вычислений.
Она полностью поддерживают многоядерность, легко масштабируются,
обеспечивает высокий уровень производительности.
3. Проведено исследование сходимости моделирования. Определены
оптимальные по точности и временным затратам параметры моделирования, такие
как величина разбиения исследуемой области, время моделирования
неустоявшегося процесса, сетка, накладываемая на область управляющих
параметров.
4. Разработаны новые методы анализа хаотической динамики на области
управляющих параметров: построены карты предельных прогибов, карты
упругопластических деформаций, карты расхождения сигналов, карты показателей
Ляпунова.
5. Изучено влияние различных граничных условий на хаотическую
динамику исследуемых объектов. Карты режимов колебаний, карты расхождения
сигналов и карты показателей Ляпунова для симметричных граничных условий в
значительной мере похожи. Области гармонических колебаний для граничных
условий типа жесткой заделки на обоих концах балки несколько больше, чем для
шарнирно-неподвижного опирания, что обусловлено большей жесткостью
системы. Колебательный процесс балки при несимметричных граничных условиях
значительно более хаотичен.
6. Изучено влияние кривизны балки на её хаотическую динамику. Как и
ожидалось, увеличение кривизны гибкой балки приводит к повышению её
жесткости, зоны гармонических колебаний увеличиваются, при этом граница
потери динамической устойчивости становится резко различимой (наблюдается
динамическая потеря устойчивости).
7. Исследована хаотическая динамика гибкой криволинейной балки в
стационарном температурном поле. Определено, что температурное поле в
приведенной постановке задачи может оказывать положительное влияние на
динамику за счет придания кривизны балке и увеличении её жесткости.
ПУБЛИКАЦИИ ПО ТЕМЕ ДИССЕРТАЦИИ
Публикации в центральных изданиях,
включенных в перечень периодических изданий ВАК РФ
1. Загниборода Н.А. Нелинейная динамика вибрационных микромеханических гироскопов
(ММГ). Ч. 1. Расчет резонатора в виде балки с начальной неправильностью с учетом
геометрической нелинейности / Н.А. Загниборода, А.В. Крысько, В.А. Крысько и др. // Вестник
Саратовского государственного технического университета. 2012. № 2 (65). Вып. 2. С. 18-24.
2. Загниборода Н.А. Нелинейная динамика вибрационных микромеханических гироскопов
(ММГ). Ч. 2. Расчет резонатора в виде балки с начальной неправильностью с учетом геометрической
нелинейности / Н.А. Загниборода, А.В. Крысько, В.А. Крысько и др. // Вестник Саратовского
государственного технического университета. 2012. № 3 (67). С. 7-15.
3. Загниборода Н.А. Нелинейная динамика бесконечно длинных цилиндрических панелей /
Н.А. Загниборода, А.В. Крысько, Ф.Р. Шакирзянов и др. // Известия КГАСУ. 2013. № 3 (25).
4. Загниборода Н.А. Хаотическая динамика гибких криволинейных балок БернуллиЭйлера. Ч. 1 / Н.А. Загниборода, А.В. Крысько, В.А. Крысько и др. // Вестник Саратовского
государственного технического университета. 2013. №2 (70). С. 12-20.
5. Загниборода Н.А. Хаотическая динамика гибких криволинейных балок БернуллиЭйлера. Ч. 2 / Н.А. Загниборода, А.В. Крысько, В.А. Крысько и др. // Вестник Саратовского
государственного технического университета. № 2 (70). 2013. С. 20-28.
19
Публикации в иностранных изданиях
6. Zagniboroda N.A. Chaotic vibrations of flexible infinitely length plate / N.A. Zagniboroda,
J. Awrejcewicz, A.V. Krysko, etc. // Proceedings 11th Conference on Dynamical Systems: Analytical,
Numerical Methods, Stability, Bifurcation and Chaos, Lodz, Poland. P 117-128.
7. Zagniboroda N.A. Analysis of chaotic vibrations of flexible plates using fast Fourier transforms
and wavelets / N.A. Zagniboroda, J. Awrejcewicz, A.V. Krysko, etc. // Int. J. Str. Stab. Dyn. Vol. 13. №
7. 1340005(12 pages), DOI:10.1142/S0219455413400051.
8. Zagniboroda N.A. Chaotic dynamics of flexible beams with piezoelectric and temperature
phenomena / N.A. Zagniboroda, I.V. Serebryakov, A.V. Krysko, etc. // Physics Letters, Section A:
General, Atomic and Solid State Physics 2013, 377 (34-36), pp. 2058-2061.
Публикации в других изданиях
9. Загниборода Н.А. Математическое моделирование стохастических колебаний
цилиндрических панелей в температурном поле (тезисы) / Н.А. Загниборода, Ю.В. Николаева,
И.Е. Кутепов // Международная конференция студентов, аспирантов и молодых ученых
«Ломоносов-2011»
МГУ,
11-15
апреля
2011
г,
М.
URL:
http://lomonosovmsu.ru/archive/Lomonosov_2011/1258/30330_ad33.pdf.
10. Загниборода Н.А. Хаотические колебания гибких бесконечно длинных цилиндрических
панелей в температурном поле (тезисы) / Н.А. Загниборода, В.А. Крысько, А.В. Крысько и др.//
Проблемы прочности материалов и сооружений на транспорте : сб. тез. докл. VIII Междунар.
конф. по проблемам прочности материалов и сооружений на транспорте, г. Санкт-Петербург, 2223 июля 2011 г. СПб., 2011. С. 68-69.
11. Загниборода Н.А. О картах характера колебаний гибких балок / Н.А. Загниборода //
Современные вопросы науки и образования – XXI век: Международная заочная научнопрактическая конференция. Тамбов. Сборник трудов. Тамбов, 31 января 2012., Ч. 9. С. 44-45.
Авторские документы
12. Загниборода Н.А. Программа для исследования колебаний однородных упругих пластин
и панелей под действием поперечной нагрузки. Свидетельство о государственной регистрации
программы для ЭВМ № 2012615709. Зарегистрировано 22 июня 2012 г.
13. Загниборода Н.А. Программа для исследования колебаний однородных упругих пластин
и панелей в температурном поле под действием поперечной нагрузки. Свидетельство о
государственной регистрации программы для ЭВМ № 2012615710. Зарегистрировано 22 июня
2012 г.
14. Загниборода Н.А. Программный комплекс для качественного исследования сложных
колебаний прямоугольных в плане двухслойных оболочек с учетом геометрической
нелинейности. Свидетельство о государственной регистрации программы для ЭВМ
№ 2013616175. Зарегистрировано 12 марта 2013 г.
15. Загниборода Н.А. Программный комплекс для качественного исследования сложных
колебаний диссипативных или консервативных систем в виде гибких упругих пологих
сферических секториальных оболочек под действием различных нагрузок, действующих в каждой
единице объема. Свидетельство о государственной регистрации программы для ЭВМ
№ 2013615164. Зарегистрировано 29 мая 2013 г.
Загниборода Николай Анатольевич
ХАОТИЧЕСКИЕ КОЛЕБАНИЯ ГИБКИХ КРИВОЛИНЕЙНЫХ БАЛОК
В ЭЛЕКТРИЧЕСКОМ ПОЛЕ
Автореферат
Подписано в печать 25.10.2013
Бум. офсет.
Усл. печ. л. 1,0
Тираж 100 экз.
Заказ 164
Саратовский государственный технический университет
410054, Саратов, Политехническая ул., 77
Отпечатано в Издательстве СГТУ. 410054, Саратов, Политехническая ул., 77
Тел.: 99-87-39, e-mail: izdat@sstu.ru
20
Формат 60×84 1/16
Уч.-изд. л. 1,0
Бесплатно