Document 4180806
advertisement

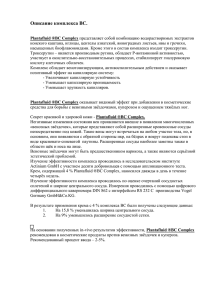
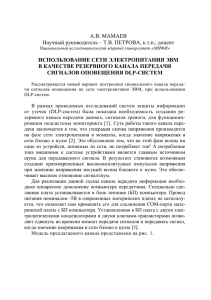
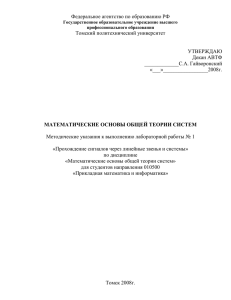
Теория сигналов и систем ____________________________________________________________________________________________ ESTIMATION OF MEASUREMENT INACCURACY EFFECT FOR FIXED OFDM SYSTEM DECODING CIRCUIT Arkhipkin A. «Kedah Electronics Engineering» This paper dedicated to fixed OFDM system decoding circuit operation with measurement inaccuracy. It is neccesary to create a requirements for input values measurement inaccuracy. At the receiver side all measured values have their inaccuracies which affect on decoding circuit operation. In this paper we use SUI multipath channel as a propagation channel model. This channel spesified by such parameters as power, time delay and K-factor for each path. In this paper we use mathematical modelling to estimate system performance degradation because of transfer factor measurement inaccuracy. АНАЛИЗ ФИЛЬТРОВ В КООРДИНАТАХ КОМПЛЕКСНОЙ ЧАСТОТЫ Мокеев А.В. Архангельский государственный технический университет В работах [1,2] показано, что на основе спектральных представлений сигналов и частотных фильтров (линейных систем) в координатах комплексной частоты достаточно просто определяются принужденные и свободные составляющие реакции фильтра при входных сигналах в виде совокупности затухающих n n колебательных составляющих x(t ) x (t ) X e t cos( t ) 1(t ) , i 1 i i mi i 1 i i (1) в том числе для частных случаев затухающей колебательной составляющей – экспоненциальной составляющей, «полубесконечных» синусоидальных и постоянных составляющих. Обобщенная математическая модель весовой (импульсной) функции частотного фильтра может быть представлена в виде совокупности двух компонент – дельта-функции и затухающей колебательной составляющей. m m t (2) g (t ) g (t ) k (t ) k e cos(w t ) 1(t ) . j 1 j j 1 j j1 j2 j j Частным случаем j-й составляющей весовой функции являются весовые функции, соответствующие частотным фильтрам первого и второго порядков, а также интегратору, усилителю и ряду других типовых динамических звеньев [2]. Согласно [1,2] выражения для определения принужденных и свободных составляющих реакции фильтра с весовой функцией вида (2) при подаче на его вход сигнала (1) n n (3) y (t ) y X K ( , ) e t cos( t F ( , )) p i 1 pi i 1 m m j 1 j 1 i mi i i i i i i t ys (t ) ysj k1 j x(t ) k2 j X ( j , w j ) e j cos(w j t j Fx ( j , w j )) , (4) где K (i , i ) K ( pi ) , F (i , i ) arg K ( pi ) соответственно модуль и аргумент передаточной функции K ( p ) при значении комплексной частоты pi i j i ; X ( j , w j ) X ( p j ) , Fx ( j , w j ) arg X ( p j ) - модуль и аргумент спектральной плотности входного сигнала p j j j w j . X ( p) при значении комплексной частоты Приведем указанные выше зависимости в матричной форме. Введем следующие обозначения: X(t ) и X ( p ) - векторы воздействия и его изображение по Лапласу, G (t ) и K ( p ) - векторы весовой и передаточной функции системы. Элементами двух первых указанных векторов являются соответственно компоненты суммы выражения (1) и их изображения, а элементами следующих двух векторов – компоненты суммы (2) и их изображения. Переход от матричной формы записи к обычной форме записи x(t ) CT X(t ) , X ( p) CT X( p) , g (t ) CTG(t ) , K ( p) CT K (t ) , где C - единичный вектор размерностью n или m. Представим выражения для i-й составляющей входного воздействия функции g j (t ) фильтра следующим образом xi (t ) и j-й составляющей весовой xi (t ) Re X i (t ) Re X mi e it e j ( it i ) , ____________________________________________________________________________________________ Доклады 9-й Международной конференции Proceedings of the 9-th International Conference 40 Теория сигналов и систем ____________________________________________________________________________________________ g j (t ) g1 j (t ) g 2 j (t ) k1 j (t ) Re k2 j e j t e j ( w j t i ) , где X i (t ) и G j (t ) - i-я и j-я составляющие комплексного входного сигнала и весовой функции. Обозначим вектор комплексного сигнала как X(t ) , а комплексную весовую функцию представим в виде двух векторов G (t ) G1 (t ) G 2 (t ) , где элементами вектора G1 являются коэффициенты k11 , k21 … k m1 , а элементы вектора G 2 (t ) определяется второй компонентой G j (t ) . Из физического смысла частотных характеристик фильтров и спектральных плотностей сигнала в координатах комплексной частоты следует, что для определения реакции фильтра (2) на входное воздействие вида (1) достаточно использовать m значений передаточной функции системы и n значений спектральной плотности входного воздействия на комплексных частотах, определяемых параметрами составляющих воздействия и весовой функции системы [1,2]. Таким образом, необходимо использовать соответственно m и n комплексных чисел. Введем диагональные матрицы k и x размерностью соответственно n n и m m, элементами которых являются указанные выше комплексные коэффициенты. При этом комплексные коэффициенты диагональной матрицы k определяются как значения передаточной функции системы K ( p ) на комплексных частотах, определяемых параметрами входного сигнала. Приведем выражение для определения i-го комплексного коэффициента k i K (i j i ) . (5) Вместо суммарного выражения для передаточной функции K ( p ) можно использовать составляющих k i C K( pi ) K1 (i , ji ) T K j (i , ji ) Комплексные коэффициенты диагональной матрицы сумму ее Km (i , ji ) . x определяются как значения изображения по Лапласу входного сигнала X ( p ) на комплексных частотах, определяемых параметрами весовой функции; для j-го коэффициента при p j j j w j x j X ( j jw j ) . (6) Выражение для определения принужденных составляющих реакции фильтра в матричной форме может быть представлено следующим образом Yp (t ) Re Yp (t ) Re k X(t ) . Выражение для определения свободных составляющих фильтра Ys (t ) Ys1 (t ) Ys 2 (t ) G1 x(t ) Re x G 2 (t ) , Итоговое выражение для определения реакции системы Y(t ) Yp (t ) Ys (t ) . Так как вектора Yp (t ) и (7) Ys (t ) должны иметь одинаковую размерность, то в зависимости от соотношения количества составляющих входного воздействия (n) и весовой функции (m) вектор меньшей размерности дополняется нулями. Переход от матричной к скалярной форме записи (при n> m) y (t ) CT Y(t ) y1 (t ) y2 (t ) yi (t ) yn (t ) . Рассмотренные выше свойства спектральных характеристик сигнала и частотных характеристик фильтра в координатах комплексной частоты позволяют расширить область применения символического метода [4]. При использовании модифицированного символического метода за счет использования вместо синусоидальных базисных функций затухающих колебаний появляется возможность определения принужденной и свободной составляющих реакции фильтра (2) на входное воздействие (1). Приведем указанные зависимости для модифицированного метода комплексных амплитуд в матричном виде. Обозначив комплексные амплитуды входного воздействия и принужденной составляющих реакции системы в виде векторов X и Y получим следующую зависимость Y k X , где элементы диагональной матрицы k определяется согласно выражения (5). Переход к оригиналу, т.е. к вектору принужденных составляющих реакции системы, производится согласно следующего выражения Yp (t ) Re E(t ) Y , где E(t ) - диагональная матрица n n с комплексными ( i ji ) t экспонентами вида e . Выражение для определения суммарной принужденной компоненты реакции системы y p (t ) CT Ypr (t ) y p1 (t ) y p 2 (t ) y pi (t ) y pn (t ) . ____________________________________________________________________________________________ Цифровая обработка сигналов и ее применение 41 Digital signal processing and its applications Теория сигналов и систем ____________________________________________________________________________________________ Для определения свободных составляющих реакции фильтра необходимо использовать вектор комплексных амплитуд для весовой функции фильтра G и вектор комплексных амплитуд свободных составляющих реакции системы Ys Ys x G , где комплексные коэффициенты диагональной матрицы x определяются согласно выражения (6). Выражение для свободных составляющих реакции системы Ys (t ) G1 x(t ) Re E(t ) Ys , где E(t ) ( jw )t j диагональная матрица m m с комплексными экспонентами вида e j . Итоговое выражение для определения реакции системы Y(t ) Yp (t ) Ys (t ) . Как и в выражении (7) в зависимости от соотношения количества составляющих входного воздействия (n) и весовой функции (m) вектор меньшей размерности дополняется нулями. Переход от матричной к скалярной форме записи (при n> m) y (t ) CT Y(t ) y1 (t ) y2 (t ) yi (t ) yn (t ) . Если известна только передаточная функция фильтра, то для использования рассмотренных выше методов анализа фильтров для определения свободных составляющих необходимо произвести предварительный расчет параметров составляющих весовой функции. При этом j и w j определяются корнями передаточной функции. Требуется определить k 2 j и j . В том случае, если порядок числителя передаточной функции равен порядку полнома знаменателя, необходимо выполнить операцию понижения порядка передаточной функции и определить коэффициент k1 . Для определения коэффициента k 2 j в случае вещественного корня целесообразно использовать следующее выражение [3] k2 j ( p p j ) K ( p) . p p (8) j Для определения коэффициентов k 2 j и j для двух комплексно-сопряженных корней предлагается использовать следующие выражения k2 j H ( p j ) / w j , j / 2 arg H ( p j ) , (9) где H ( p j ) ( p p j )( p p j 1 ) K ( p) , p j и p j 1 - комплексно-сопряженные корни. p p j Рассмотрим пример использования модифицированного метода комплексных амплитуд. Математическое описание входного воздействия 0,5e 20t 0,5e j 0,5 /( p 20) , j0 , 2 2 X(t ) 2 cos(300t ) X 2 e X( p) 2 p /( p 300 ) 2 2 1,5e 80t cos(500t / 2) 1,5e j / 2 750 /(( p 80) 500 ) 2 6 8 Передаточная функция фильтра K ( p) 40 p 0,168 10 p 0,132 10 . 2 2 ( p 40)( p 200 p 412 ) Параметры составляющих весовой функции фильтра определим согласно выражений (8) и (9) 40e40t , 40 /( p 40) , 40 . K ( p) G(t ) 100t cos(400t / 2) 400e 4002 /(( p 100) 2 4002 ) G 400e j / 2 Предварительно определяем матрицы k иx 0 0 2,962 0 , , x 0, 0270 j 0,699 k 0 1, 695e 0 0 j 0,866 0, 0049 e 0 0 1, 768e j 2,879 Принужденные составляющие реакции системы 0,5e j 2,962 e 20 j 0t 1, 481e20t . 0 j 300 t j 0,699 Yp (t ) Re 2 1, 695 e e 3,39 cos(300t 0, 699) 80 t 80 j 500 t j / 2 1, 768e j 2,879 e 1,5e 2, 652e cos(500t 1,834) Свободные составляющие реакции системы 40 0,0270 e( 40 j 0)t 1,084e40t . Ys (t ) Re j / 2 j 0,866 ( 100 j 400) t 100 t 400 e 0,0049 e e 1,95 e cos(400 t 2, 456) Модифицированный метод комплексных амплитуд может быть использован и для анализа линейных цепей [4]. Учитывая прямую связь между модифицированным методом комплексных амплитуд и анализом фильтров при использовании спектральных представлений в координатах комплексной частоты, имеется возможность использования модифицированного символического метода для анализа фильтров в том ____________________________________________________________________________________________ Доклады 9-й Международной конференции Proceedings of the 9-th International Conference 42 Теория сигналов и систем ____________________________________________________________________________________________ случае, если весовая функция фильтра и входной сигнал представлены в виде совокупности затухающих колебательных составляющих конечной длительности. Литература 1. Мокеев А.В. Использование спектральных представлений сигналов и систем на основе преобразования Лапласа для анализа линейных систем // Труды РНТОРЭС им. А.С.Попова. Серия: Цифровая обработка сигналов и ее применение. Выпуск: VIII-1.- Москва, РНТОРЭС , 2006. - т.1, с.43-47. 2. Мокеев А.В. Анализ и синтез частотных фильтров при использовании спектральных представлений в координатах комплексной частоты // Микропроцессорные, аналоговые и цифровые системы: проектирование и схемотехника, теория и вопросы применения: Материалы VI Междунар. науч.-практ. конф. – Новочеркасск, ЮРГТУ, 2006. 3. Теория автоматического упраления / под ред. А.А.Воронова. – М.: Высш. шк., 1986. 4. Мокеев А.В. Анализ линейных систем с помощью модифицированного метода комплексных амплитуд // Микропроцессорные, аналоговые и цифровые системы: проектирование и схемотехника, теория и вопросы применения: Материалы VI Междунар. науч.-практ. конф. – Новочеркасск, ЮРГТУ, 2006. ANALYSIS OF FILTERS IN COORDINATES OF COMPLEX FREQUENCY Mokeev A. The Arkhangelsk State Technical University In the report it is considered use of spectral expansion based on Laplace transform for analyse of stationary and non-stationary frequency filters modes. On the base of physical meaning of frequency responses of filters and spectral densities of a signal in coordinates of complex frequency a conclusion can be made, that for definition of reaction of the filter on input signal as a set of fading oscillatory components it is enough to use finite amount of values of transfer function of the filter and finite amount of values of spectral density of input signal on the complex frequencies defined in parameters n of components of signal and m of components of impulse function’s filter [1]. Having introduced complex vectors X(t ) and G (t ) , where real which parts of elements are components of an input signal and impulse function of the filter, we shall receive following expressions for definition forced and free components of reaction’s filter in the matrix form Yp (t ) Re k X(t ) , Ys (t ) Re x G (t ) , where k and x are diagonal matrixes dimension n n and m m with elements, which are the complex coefficients equal to value of transfer function on complex frequencies, determined in the parameters making an input signal and to values of spectral density of an input signal on the complex frequencies determined in parameters of impulse function’s filter. For simplification of calculations it is offered to use the modified complex amplitude method based on use fading oscillatory components instead of sinusoidal basic functions. Having designated vector of complex amplitudes of an input signal X , we shall receive the following formula for definition of a complex amplitudes’ vector of the forced components of the filter’s reaction and a vector forced components of the filter’s reaction Y k X , Yp (t ) Re E(t) Y , where E(t ) a diagonal matrix n n elements in the form complex exponent e( i ji )t ; pi i j i the complex frequency determined for i'th component of input signal. For definition of free components’ reaction of the filter it is necessary to use a vector of complex amplitudes for impulse function’s filter G and a complex amplitudes’ vector of free components reaction’s filter Ys Y x G , Ys (t ) Re E(t ) Y . where E(t ) a diagonal matrix m m elements as complex exponent e ( j jw j )t ; p j j j w j the complex frequency determined j’th as component of impulse function. Described approach to analyse of frequency filters based on spectral expansion of Laplace transform also can be distributed on FIR filters and input signals as a whole of fading oscillatory components of finite duration, and also for digital filters [2]. References 1. Mokeev A.V. Signal and system spectral expansion application based on Laplace transform to analyse linear systems // Proceedings of the 8-th International Conference on Digital Signal Processing and its Application (DSPA2006). - Moscow, 2006. - Vol.1, pp.43-47. 2. Mokeev A.V. Analysis of FIR filters under input signals of finite duration // Proceedings of the 9-th International Conference on Digital Signal Processing and its Application (DSPA-2007). - Moscow, 2007. – (In the Proceedings). ____________________________________________________________________________________________ Цифровая обработка сигналов и ее применение 43 Digital signal processing and its applications Теория сигналов и систем ____________________________________________________________________________________________ АНАЛИЗ ШУМОВ НЕОРТОГОНАЛЬНОСТИ ДИСКРЕТИЗИРОВАННОГО КАНАЛА СВЯЗИ С ПОСТОЯННЫМИ ПАРАМЕТРАМИ Батенков К.А. Академия ФСО Тенденции развития современных систем передачи информации (СПИ) предполагают переход к цифровым методам ее обработки. Это вызвано рядом причин. Основным преимуществом такого подхода является легкость восстановления точной копии передаваемого сигнала вследствие его избыточности. Цифровое программное обеспечение допускает более гибкую реализацию по сравнению с аналоговым [1]. Кроме того, наиболее разработанной частью общей теории связи является теория передачи дискретных сообщений [1]. Тем не менее, основой остается аналоговый канал связи, содержащий бесконечное число измерений. После дискретизации его размерность снижается, и он может быть представлен как параллельное соединение одного или нескольких подканалов. В целях передачи максимально возможного количества информации каждый такой подканал должен быть линейно независим от других. Это связано с необходимостью как можно точнее различать сигналы отдельных подканалов [2]. Кроме того, задачи обнаружения решаются значительно проще, если рассматриваются в координатной системе, где случайные величины некоррелированны [3]. Наиболее удобным для применения классом линейно независимых сигналов являются ортонормированные функции, получить которые возможно с помощью процесса ортогонализации ГрамаШмидта [4]. Представление сигналов посредством обобщенного ряда Фурье в выбранном базисе позволяет с необходимой точностью воспроизводить исходные сигналы посредством относительно несложных преобразований. Предпочтительность ортонормированных функций объясняется отсутствием переходных помех при выделении подканалов путем вычисления коэффициентов обобщенного ряда Фурье [5]. Согласно аппаратной реализации ортогонального разложения сигналов [3] типовая схема дискретного канала связи изображена на рисунке 1. Рис. 1. Модель дискретного канала связи Nb Сигнал на входе аналогового канала представляется обобщенным рядом Фурье: X x (1) i i i 1 где N b – число подканалов; xi , i 1, Nb – координаты точки сигнального созвездия; i – i -ая базисная функция на входе канала. Координаты точки на выходе канала связи определяются как скалярное произведение сигнала на выходе аналогового канала X ' t и i -ой базисной функции на выходе канала i' t : x ' X ' t ' t dt , i 1, N (2) i i b t Рассмотрим канал связи с аддитивным белым гауссовским шумом. Сигнал на его выходе задается выражением [1]: X ' t X h t , d n t (3) где h t , – импульсная характеристика аналогового канала (в общем случае нестационарного); n t – белый гауссовский шум. Наряду с ограничениями на энергетический и частотный ресурсы присутствует и лимит на временные затраты, не учитываемый требованиями к характеристике канала связи. Поэтому целесообразно представить импульсную характеристику аналогового канала в виде: h t , q ha t q ' t (4) ____________________________________________________________________________________________ Доклады 9-й Международной конференции Proceedings of the 9-th International Conference 44 Теория сигналов и систем ____________________________________________________________________________________________ где q – оконная функция на входе канала; ha t – импульсная характеристика линейной системы модели канала; q ' t – оконная функция на выходе канала. Необходимо отметить, что в результате такого преобразования исходный аналоговый канал перестает быть инвариантным, и его спектральные характеристики будут изменяться во времени. Определим величину взаимной энергии (шумов неортогональности [2] в случае, если i j ) между сигналами подканалов на выходе канала связи: Ei', j M xi' x 'j , i, j 1, N b (5) где M x – математическое ожидание случайной величины x . Входные и выходные базисные функции однозначно связаны между собой [4]: i' t i h t , i d , i 1, Nb (6) где i2 – энергия i -ой базисной функции на выходе канала. Подставляя (1) в (3), координаты точек выхода выражаются в виде: Nb xj j 1 j xi' t t dt n t t dt , ' j ' i ' i t (7) i 1, N b t Тогда, учитывая независимость xi и гауссовского шума, а также его нулевое математическое ожидание, взаимная энергия определяется формулой: Nb Nb x xp Ei', j M k k' t i' t dt p' t1 'j t1 dt1 2 i' t 'j t dt p 1 p t1 t k 1 k t где 2 (8) – дисперсия гауссовского шума. Рассматриваемые сигналы различных подканалов xi можно предполагать независимыми, т.к. почти во всех современных модемах применяется скремблирование, практически полностью устраняющее переходные помехи на входе. Поэтому (8) преобразуется к виду: Nb M xk2 k 1 k2 Ei', j t t dt t t dt ' k t ' i ' k t1 1 ' j 1 1 2 i' t 'j t dt (9) t В идеальном случае, когда базисные функции входа и выхода ортонормированны, подканалы являются некоррелированными, а в случае гауссовского шума еще и независимыми [2]. Однако в используемых СПИ второе условие зачастую не выполняется. Для подтверждения этого факта исследуем прохождение сигналов через канал связи тональной частоты, остаточное затухание которого изображено на рисунке 2, в отсутствие аддитивного шума. Предполагается, что подканалы на входе независимы и M xi2 1, i 1, N b , оконные функции определяются скоростью модуляции Vk и имеют форму видеоимпульсов: 1, t 0,Vk1 q t q 't 1 0, t 0, V k (10) При этом в качестве базиса используются несущие колебания протоколов модуляции для коммутируемых линий [6]. Рис. 2. Зависимость остаточного затухания ar исследуемого канала от частоты f ____________________________________________________________________________________________ Цифровая обработка сигналов и ее применение 45 Digital signal processing and its applications Теория сигналов и систем ____________________________________________________________________________________________ Nb Nb E Относительная величина шумов неортогональности выражается как: Em i 1 j 1 j i Nb Nb i, j (11) E i 1 j 1 i, j Результаты вычислений согласно (9) и (11) приведены на рис. 3. Протоколы, использующие частотную модуляцию (V.21, V.22, V.23, PEP, TurboPEP), оказываются наименее эффективными с точки зрения шумов неортогональности. Это вызвано наличием более двух несущих, разнесенных по частоте. Взаимная энергия между подканалами при фазовой модуляции (V.26, V.27) близка к нулю, поскольку несущих всего две, а скорость модуляции мала. Переход к квадратурной амплитудной модуляции (V.29, V.32, V.33, V.34, HST, ZyX) не изменяет структуру базиса, но увеличивает скорость модуляции, а, следовательно, и возрастают шумы. Полученные результаты свидетельствуют о том, что при обработке полученной информации (даже в отсутствии канальных помех) будут присутствовать шумы неортогональности, снижающие характеристики приемника. Согласовав структуру базиса c характеристиками канала связи, можно добиться уменьшения негативного воздействия переходных помех, а в идеальном случае их полностью устранить. В связи с чем существует необходимость синтеза такой системы базисных функций, которые не только ортонормированны на входе, но и ортогональны на выходе, что устранит корреляционные связи между подканалами. Отсутствие шумов неортогональности подразумевает выполнение равенства: Ei', j i i , j , i, j 1, Nb (12) где i – смесь дисперсий i -го подканала и аддитивного шума на выходе; i , j – символ Кронекера. Рис. 3. Относительная величина шумов неортогональности протоколов модуляции Для соблюдения (12) необходима ортогональность функции i' t и выражения внутри фигурных скобок правой части (9) [2], следовательно, в виду линейной независимости базиса t t dt ' i ' j i, j , i, j 1, Nb (13), t Первое слагаемое как в (14), так и в (8) при i M xi2 i2 2 i' t : (14) i j представляет собой отношение энергии передаваемого сигнала по i –му подканалу к величине его ослабления и соответствует энергии полезного сигнала в подканале на приеме. Различие состоит в том, что в первом случае наложено ограничение на ортонормированность базисных функций. Наиболее предпочтительно оценивать помехоустойчивость системы передачи информации, использующей непрерывные по уровню сигналы, отношением средних мощностей полезного сигнала и шума [1]. Поэтому эффективная система должна не только удовлетворять требованию отсутствия шумов неортогональности, но и достигать максимально возможного отношения энергии полезного сигнала к дисперсии аддитивного шума. На основании вышесказанного целесообразно сформулировать следующие оптимизационные задачи: M xi2 i2 2 max, i 1, Nb ' (15) при ограничениях (13) и (6). Их можно классифицировать как задачи с i t нелинейной целевой функцией при наличии нелинейных ограничений в виде равенств. Решение данных задач позволит найти такие базисные функции, дискретизирующие исходный непрерывный канал, которые не только обеспечат отсутствие корреляционных связей между образующимися подканалами, но и создадут систему оптимальную с точки зрения помехоустойчивости. Литература 1. Теория электрической связи: Учебник для ВУЗов/ Под ред. Д.Д. Кловского – М.: Радио и связь, 1999. – 432 с. ____________________________________________________________________________________________ Доклады 9-й Международной конференции Proceedings of the 9-th International Conference 46 Теория сигналов и систем ____________________________________________________________________________________________ 2. 3. 4. 5. Ван Трис Г. Теория обнаружения, оценок и модуляции. Т.1 – М.: Сов. радио, 1972.– 744 с. Баскаков С.И. Радиотехнические цепи и сигналы: Учебник. – М.: Высш. Школа., 1983.– 536 с. Галлагер Р. Теория информации и надежная связь.– М.: Советское радио, 1974. – 720 с. Григорьев В.А., Григорьев С.В. Передача сообщений.– СПб.: ВУС, 2002.– 224 с. THE NONORTHOGONAL NOISE ANALYSIS OF THE PERMANENT PARAMETERS DISCRETE COMMUNICATION CHANNEL Batenkov K. Academy of FGS Modern communication development tendencies intend the switch to the digital processing technique. This is caused by the following motives. The main advantage of such approach is the replicated transferred signal recovery facility. Digital software support permits more flexibility in comparison with analog one. Besides the most communication theory developed part is discrete communication theory. Nevertheless analog channel remains the basis. It contains the infinite dimension count. Its dimension descends after sampling. Such channel is offered as one or several subchannels abreast. Every such subchannels must linear independence from other ones for maximum transmission information amount. It is bounded up with the subchannel signal precision discrimination necessity. Moreover detection problems are solved simpler if they are considered in the uncorrelated variates coordinate system. The most convenient linear independence signals for use are the orthonormal functions which are received with orthogonalization process. Signal notion by Fourier generalized series in selected basis allows to render initial signals with adequate accuracy by relatively simple transformations. Orthonormal functions preference is explained self-interference absence on the subchannel sorting by Fourier generalized series coefficient computation. Frequency, energy and time limitations communication channels are used in present transmission systems. Permanent parameters discrete communication channel model takes no account endurance restriction. Therefore channel model with input and output slot setting requirements to the information transmission time is offered. Nonorthogonal noise relative values characterizing subchannel interference are investigated in model context. Switched line modulation protocol carriers are used as subchannel carriers. Frequency modulation protocols are least effective with relation to the nonorthogonal noise. It is bounded up with availability of more then two carriers. The subchannel cross correlation approaches to zero in phase modulation because only two carriers are attended and modulation rate is small. Quadrature modulation conversion does not modify the carrier system but increases modulation rate and so noise extend. Available results are evidence of nonorthogonal noise on receiving even if channel noise are absented. Self-interference negative influence is decreased if carrier system adjusts with channel characteristics. It completely eliminates in ideal case. Because of than function basis orthonormalized not only on input but on output is necessity. It eliminates subchannel correlation. Streamlined system must satisfy nonorthogonal noise absence requirements and achieve noise-to-signal ratio. Therefore solving of problems stated in report allows to find function basis quantizing analog channel, guaranteeing nonorthogonal noise absence and moreover maximizing system noise immunity. ____________________________________________________________________________________________ Цифровая обработка сигналов и ее применение 47 Digital signal processing and its applications