Document 4180497
advertisement

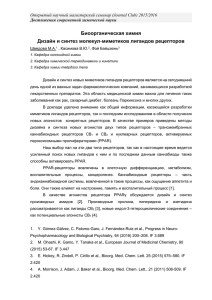
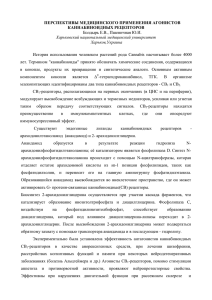
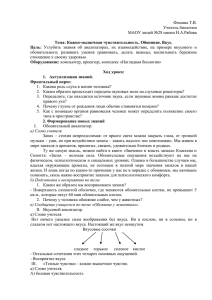
3.5. Динамика изменяющегося во времени образа Изменение образа во времени прежде всего связано о запаздыванием срабатывания рецепторов. В общем случае рецептор можно считать апериодическим (инерционным) звеном первого порядка; его работа описывается дифференциальным уравнением первого порядка; передаточная функция рецептора имеет следующий вид: k b , W a Tp S 1 где a — внешнее воздействие на рецептор; b — возбуждение рецептора; Tp — постоянная времени рецептора; k — коэффициент передачи. При ступенчатом внешнем воздействии, а точнее — при единичном воздействии a 1 t , возбуждение рецептора будет изменяться по экспоненциальному закону: t Tp b A t b A b A b A 1 e , (2.74) bA t — изменение возбуждения рецептора во времени; b A — окончательное возбуждение рецептора в последующей ситуации A ; b A — возбуждение рецептора в предыдущей ситуации A ; t — текущее время. Выясним, как будет изменяться во времени коэффициент приведения образа предыдущей ситуации A к образу последующей — A , и допустим, что быстродействие у всех рецепторов одинаковое: Tp =const. Тогда получим где m SAA t b 1 A b A t , m b 1 2 A и после подстановки сюда выражения (2.74) и некоторых преобразований будем иметь SAA t SAA SAA 1 e t Tp , (2.75) где S AA — окончательный коэффициент приведения, который сформируется по завершению переходного процесса, т.е. при t 34Tp , а точнее; при t , так что SAA SAA . Рис.2.11. Изменение коэффициента приведения образов во времени На рис 2.11 представлен график зависимости коэффициента приведения S AA от времени t. Она носит такой же экспоненциальный характер, как и возбуждение во времени рецепторов (2.74). Экспонента всегда начинается с единицы и изменяется (увеличивается или уменьшается) во времени до значения зависимости является постоянная времени рецепторов SAA . Определяющим параметром Tp . Теперь рассмотрим случай, когда рецепторы по своему быстродействию делятся на две группы с постоянными времени Tp1 и Tp2 . Пусть количество рецепторов в обеих группах будет одинаковым, тогда коэффициент приведения S AA во времени определится как m b SAA t 2 1 A b A t m b m 2 1 A b A t . m b 1 2 A Используя выражение (2.74), окончательно получим S AA t S AA m b 2 1 A b A b 2 A e t Tp 1 m b m 2 1 m b 1 A b A b 2 A e t Tp 2 . 2 A Допуская некоторую неточность, полученное выражение можно привести к виду S AA t S AA t Tt 1 Tp 2 p 1 S AA 1 e e . 2 По подобию можно определить зависимость коэффициента приведения числа групп рецепторов с различными быстродействиями: S AA t S AA SAA от времени t при наличиии любого t t Tt 1 Tp 2 Tpn p 1 S AA 1 e e e , n где n — число групп рецепторов, одинаковых по числу рецепторов в них. Все полученные зависимости говорят о том, что коэффициент приведения S AA изменяется в любом случае по экспоненте, только параметры этой экспоненты определяются всякий раз временными характеристиками действительных рецепторов. Запаздывание возбуждений рецепторов можно использовать для получения такого нового качества обучаемой системы управления, как выделение движения образов. Представим очувствление системы в виде двух рядов рецепторов с различными постоянными времени: T1 , T2 , причём T1 < T2 . И пусть на эти ряды оказывается внешнее воздействие, например пучком света, с апертурой в форме прямоугольника (рис. 2.12). Если внешнее воздействие неподвижно (ситуация А), то возбуждённые рецепторы (на рис.2.12 они заштрихованы) будут определяться точно апертурой. Если внешнее воздействие смещается вправо (ситуация В), то форма возбуждённых рецепторов не будет соответствовать апертуре: рецепторы второго ряда будут отставать со своим возбуждением, — и у апертуры появится «хвост» возбуждённых рецепторов слева. При движении внешнего воздействия влево (ситуация С), «хвост» возбуждённых рецепторов окажется справа. А коли образы во всех трёх ситуациях различны, то обучаемая система управления будет воспринимать их по-разному: предварительно обученная она способна будет различать движения. 2 Рис.2.12. Возбуждения рецепторов при движениях внешних воздействий Определим соотношение параметров очувствления, необходимое для выделения движения на всем его диапазоне. Если рассматривать крайний случай возбуждений рецепторов, когда в исходном состоянии это возбуждение равно нулю, то экспонента роста возбуждения будет иметь вид t Tp b t b max 1 e . Действительную позицию внешнего воздействия выделяют самые быстродействующие рецепторы, в нашем случае — 1-ый ряд рецепторов, у которых постоянная времени T1 . Они должны успевать возбудиться по крайней мере, до своего минимального регистрируемого уровня b min , превышающего уровень шума, за время t min , определяемое шагом расположения рецепторов h1 при самой большой скорости перемещения внешнего воздействия Vmax ; с учётом всего этого экспонента примет вид b min h1 T1Vmax . b max 1 e Произведя преобразования с помощью натурального логарифмирования, получим условие регистрации текущей позиции внешнего воздействия: T1 h1 Vmax ln1 b min b max . (2.76) Рецепторы 2-го ряда, наоборот, должны иметь такую большую постоянную времени T2 , то есть такое большое запаздывание, при котором они обеспечивали бы сдвиг возбуждений на самой малой скорости перемещения внешнего воздействия Vmin . Условие невозбуждения рецептора 2-го ряда в начале внешнего воздействия на него, определённое по аналогии, примет вид T2 h 2 Vmin ln1 b min b max , (2.77) 3 где h 2 — шаг расположения рецепторов 2-го ряда. Что же касается запаздывания сброса возбуждения рецепторов 2-го ряда после того, как прекратилось внешнее воздействие на него (образование «хвоста»), то условие такого запаздывания выявляется, в свою очередь, из условия спадания возбуждений рецепторов по экспоненте с прежней постоянной времени T2 ; эта экспонента выглядит так: b t b max e t T2 . Отсюда следует, что «хвост» у пятна возбуждения образуется, очевидно, тогда, когда T2 h2 b ln min . Vmin b max (2.78) Условия (2.76), (2.77) и (2.78) гарантируют то, что обученная обучаемая система управления способна в принципе различать движения внешнего воздействия. В качестве примера можно проследить за реакцией зрячего робота при появлении в его поле зрения движущегося объекта, например человека. Если человек будет неподвижно стоять, то действия обученного робота будут одними, а если человек начнёт двигаться, то — другими; какими именно — определит обучение; главное: в первом и во втором случаях робот будет воспринимать зрительно человека по-разному. Следует уточнить и то, что с увеличением скорости смещения внешнего воздействия будет увеличиваться (удлиняться) «хвост» пятна возбуждения, а это значит, что в примере со зрячим роботом он способен различать спешащих и медленно идущих людей. Примеры и задачи Пример 2.1. Вычисление коэффициентов приведения и степени сходства. Исходные данные: Образ А: 2 1 2 1 3 1 2 1 2; Образ В: 1 3 1 3 3 3 1 3 1. Требуется: Вычислить коэффициент приведения S AB образа А к образу В, встречный коэффициент приведения S BA образа В к образу А и степень сходства SABA образов А и В. Выполнение: По формуле (2.10) вычислим сумму произведений однономерных чисел образов Sп р,AB : Sп р,AB 2 1 1 3 2 1 1 3 3 3 1 3 2 1 1 3 2 1 29. По формуле (2.7) вычислим суммы квадратов чисел отдельно для образов А и В: Sкв,A 22 12 22 12 32 12 22 12 22 29 ; Sкв,B 12 32 12 32 32 32 12 32 12 49 . По формуле (2.11) вычисляем коэффициент приведения S AB и встречный коэффициент S BA : SAB 29 29 1 ; SBA 29 49 0,59 . По формуле (2.12) вычислим степень сходства SABA : SABA 29 2 0,59 . 29 49 Пример 2.2. Определение продолжительности обучения в двух ситуациях. Таблица 1 Исходные данные Ситуации Возбуждения Требуемые Допустимые рецепторов сигналы погрешности управления b1 b2 b3 b4 E 4 А: В: 1 2 2 1 1 2 2 1 1 2 0,1 0,1 Требуется: Определить продолжительность обучения в циклах. Выполнение: По формуле (2.11) вычисляем коэффициент приведения S AB образа А к образу В и встречный коэффициент приведения S BA образа В к образу А: 1 2 2 1 1 2 2 1 0,8 ; 12 2 2 12 2 2 1 2 2 11 2 2 1 0,8 . 2 2 12 2 2 12 SAB S BA По формуле (2.12) вычислим степень сходства SABA образов А и В: SABA 1 2 2 1 1 2 2 1 2 12 22 12 22 22 12 22 12 0,64 . По формуле (2.31) определим продолжительность обучения в циклах: 0,1 lg 1 0,64 2 0,8 TA 1 6,06 . lg 0,64 Округляя до целого большего, получим TA = 7 циклов. Пример 2.3. Аккомодация (наведение на резкость) глаза. Исходные данные: b1 b 2 b 3 b 4 b 5 b 6 b 7 b 8 b 9 b 10 Зрительный образ А: 3 7 3 7 7 7 3 7 3 3 Требуется: Определить изменение сигнала управления механизма аккомодации при наведении изображения (зрительного образа) на резкость и при снижении резкости и сделать вывод о работе механизма. Выполнение: Определим проводимости синапсов, формирующиеся под действием возбуждений рецепторов образа А, принимая исходные проводимости равными нулю: c = 0, — и сигнал управления равным единице: E A = 1: 1 3 3 7 3 7 7 7 2 32 7 2 32 32 0,0103448; c1 c 3 c 7 c 9 c10 ; 1 c2 2 7 2 2 2 2 3 7 3 7 7 7 2 32 7 2 32 32 0,0241379; c 2 c 4 c5 c 6 c8 . c1 2 2 2 2 2 Изменим резкость изображения в соответствии с выражением (2.56). Среднеарифметическое возбуждение рецепторов bс р SA m 50 10 5 . Каждое новое возбуждение определится как b 5 k b 5 . Сначала примем k = 1,5, то есть усилим резкость изображения, и тогда новый образ A примет вид: образ A : 2 8 2 8 8 8 2 8 2 2. образа А равно Определим сигнал управления, сохраняя проводимости синапсов прежними: E A 5 2 0,0103448 5 8 0,0241379 1,068964 . Изменение сигнала управления составит: 5 E A E A E A 0,068964 . Затем примем k = 0,5, то есть ослабим резкость изображения, и тогда получим новый образ A : образ A : 4 6 4 6 6 6 4 6 4 4. Если идти от образа A к образу A , то сигнал управления определится уже как: E A 5 4 0,0103448 5 6 0,0241379 0,931033 . Изменение сигнала управления составит: E A E A E A 0,068967 . Вывод: принимая привод механизма аккомодации действующим только в одну сторону и реагирующим только на положительное изменение сигнала управления, убеждаемся, что движение будет только в сторону усиления резкости ( E A >0) и не будет в обратном направлении ( E A <0). Тот же результат можно получить, используя приведение образов. Для этого определим коэффициент приведения S AA образа A к образу A и коэффициент приведения SAA образа A к образу A : SAA (3 2 7 8 3 2 7 8 7 8 7 8 3 2 7 8 3 2 3 2) / (32 7 2 32 7 2 7 2 7 2 SAA 32 7 2 32 32 ) 1,068965; (3 4 7 6 3 4 7 6 7 6 7 6 3 4 7 6 3 4 3 4) / (32 7 2 32 7 2 7 2 7 2 32 7 2 32 32 ) 0,931034. Сигналы управления определятся как E A E A SAA 1 1,068965 1,068965 ; E A E A SAA 1 0,931034 0,931034 . Рис.2.13. Изменение фактического сигнала управления при смещении взора по шахматному полю Пример 2.4. Определение параметров технического глаза обучаемой системы управления. Исходные данные: Система обучена в ситуации А, когда глаз обозревал шахматное поле с мелкими клетками. При смещении взора (фактический сигнал управления E f изменялся по закону, отраженному на рис. 2.13. Требуется: Охарактеризовать очувствление глаза и определить точность его позиционирования x . Выполнение: С учётом зависимостей (2.15) и (2.72) теоретический сигнал управления E A при смещении взора должен изменяться по наклонной от E A при х = 0 до нуля при х = а, где а — размер шахматной клетки; х — смещение взора. 6 Форма изменения фактического сигнала управления E f (рис.2.13) говорит о частном случае, когда на каждую клетку шахматного поля приходится по одному рецептору сетчатки глаза с точечной чувствительностью. Следовательно, сетчатка глаза насчитывает столько рецепторов, сколько шахматных клеточек в поле зрения глаза. Точность позиционирования глаза x определяется из рис. 2.13 и равна: x a 2 . График (рис.2.13) позволяет определить также среднюю погрешность сигнала управления E ср , как результат деления заштрихованной площади на величину а: E с р a E A 4a E A 4 . Задача 2.1. Определить продолжительность обучения в двух ситуациях А и В графическим способом (рис.2.1), если степень сходства образов этих ситуаций SABA равна 0,1, требуемые сигналы управления равны: E A =1; E B =2, — допустимые отклонения этих сигналов равны: A = B =0,1. Повторить определение продолжительности для степеней сходства образов: 0,5; 0,64; 0,8. Задача 2.2. Определить погрешность сигнала управления при предъявлении ситуации А, если обучение проводится в трёх ситуациях А, В, С, погрешность в предыдущем цикле после обучения в ситуации А и при предъявлении ситуации В равна -0,5, а после обучения в ситуации В и при предъявлении ситуации С равна +0,3 и если коэффициенты приведения образов ситуаций равны: S BA =0,8; S CA =0,9. Задача 2.3. Определить сигнал управления E B в ситуации В с образом: 6 2 4 2 6, — если в ситуации А с образом: 3 1 2 1 З — он равен E A =1. Задача 2.4. Определить коэффициенты приведения S AA образа предыдущей ситуации А: 1 9 7 3 5 5 4 6 2 8, — к образу последующей — A , возникающей при изменении контрастности образа ситуации случаях: 1) рецепторы света — чётные, а рецепторы темноты — нечётные; 2) наоборот, рецепторы света — нечётные, а рецепторы темноты — чётные. A на величину b =2 в Задача 2.5. Сетчатка глаза включает фоторезисторы СФЗ-4Б с постоянной времени T1 = 0,008 с и СФ2-8 с постоянной времени T2 = 0,03 с. Определить шаги расположения h1 и h 2 тех и других фоторецепторов при условии, что обученная система способна различать движущиеся объекты в диапазоне скоростей Vmax = 1 000 мм/с и Vmin = 100 мм/с. Гарантированный пороговый уровень возбуждения фоторезисторов — 50 % от максимального значения, то есть b min b max =0,5. Литература 1. Аветисов Э. С., Розенблюм Ю. З. Вопросы офтальмологии в кибернетическом освещении. — М.: Медицина, 1973. 2. Антонов В. М., Буков А. А. Влияние порядка предъявления образов на скорость обучения ОСУ выработке сигналов управления исполнительным органом робота // Тез. докл. обл. н.-пр. конф. Промышленные роботы в механообработке, 3 дек. 1986 г.Липецк, 1986. — С.20-23. 3. Антонов В. М., Буков А. А. Обучение определению кодов двух образов // Тез. докл. обл. н.-пр, конф. Промышленные роботы в механообработке, 3 дек. 1986 г. — Липецк, 1986. — С. 26-28. 4. Антонов В. М., Буков А. А., Морозова В. П. Влияние отличительности и заданной точности на продолжительность обучения определению кодов двух образов // Тез. докл. обл. н.-пр. конф. Промышленные роботы в механообработке, 3 дек. 1986 г. — Липецк, 1986. — С. 29-31. 5. Антонов В. М., Буков А. А. Обучение определению кодов двух образов с бинарным представлением признаков / Липецкий полит. ин-т.- Липецк, 1987: Деп. в ЦНКИТЭИприборостроения 09.04.1987, №3729-пр. 6. Антонов В. М., Буков А. А. Выбор ситуаций при обучеии робота / Липецкий политехн. ин-т.- Липецк, 1987.- Деп. в ВНИИТЭМР 25.05.1987, ¹248-мш87. 7. Антонов В. М., Буков А. А. Выбор ситуаций при обучении робота // Автореферат статьи деп в ВНИИТЭМР 25.05.1987, №248-мш87/ РЖ 37 Промышленные роботы и манипуляторы, №10, 1987 г. — ВИНИТИ, - С.31. 8. Антонов В. М. Датчик перемещения для обучаемой системы управления // А.с. СССР 1788469 G 01 Р 3/36, заявл. 08.07.1987. Опубл. 15.01.1993. Бюл. №2. 9. Морозова В. П. Обучение определению кодов трёх образов // Тез. докл. обл. н.-пр. конф. Опыт и проблемы внедрения робототехники и ГАП на промышленных предприятиях области, ЛипПИ, 8-9 дек. 1987 г. - Липецк, 1987.С.71-72. 10. Буков А. А. Обучение системы управления при последовательном предъявлении образов / Липецкий политехн. инт.- Липецк, 1988.- Деп. в ВНИИТЭМР 19.07.1988, №248-мш88. 7 11. Антонов В. М., Буков А. А., Морозова В. П. Расчёт весовых коэффициентов признаков образов // Программное средство ОФАП ГИВЦ Минвуза РСФСР/ Липецкий политехн. ин-т.- Липецк, 1989, инв.№72.3000 056 (ГосФАП СССР инв.№50890001099). 12. Буков А А. Оптимизация процесса обучения системы управления // Тез. докл. н.-т. конф. Молодежь и научнотехнический прогресс, 12-13 окт. 1989 г. — Липецк, 1989. - С .43-46. 13. Антонов В. М., Буков А. А. Использование обобщённых ситуаций при формировании памяти робота с обучаемой системой управления // Сб. науч. тр. Теория и техника автоматического управления, УНПК «Кибернетика» Томского политехн. ин-та, Томск, 1990.- С.172-181.: Деп. в ВИНИТИ 15.02.1991, №775-В91. 14. Антонов В. М. Определение коэффициентов приведения образов в обучаемых системах управления // Сб. Научн. тр. Технология машиностроения. Январь 1996 г., ЛипГТУ, Липецк, 1996.-С.34-41. 8