общие подходы к моделированию поведения
advertisement

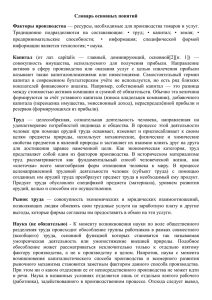
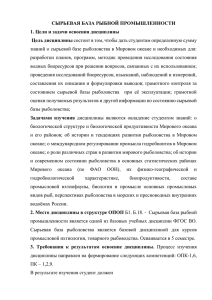
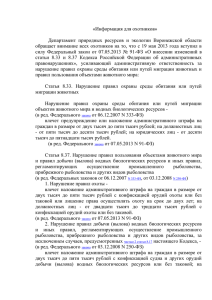
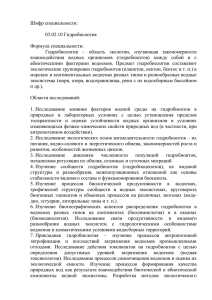
Мясников Д.В., Осипов Е.В., Ступникова М.А. ОБЩИЕ ПОДХОДЫ К МОДЕЛИРОВАНИЮ ПОВЕДЕНИЯ ГИДРОБИОНТОВ При проектировании орудий рыболовства необходимо учитывать поведения объекта лова. В настоящее время большое количество работ посвященных поведению гидробионтов носят в основном описательный характер, в других приводится схематизация поведения, которая используются для обоснования расчетов орудий лова [1 - 2] (тралы, кошельки) облавливающие рыб образующих косяки или скопления (минтая, сельдь, скумбрия и т.д.). Но в рыболовстве используются орудия лова, которые облавливают гидробионтов не образующих скоплений вследствие чего их индивидуальное поведение схематизировать затруднительно. Таким образом, обобщенные методы моделирования поведения гидробионтов в основе должны включать индивидуальное поведение и от него переходить к стайному поведению. Это позволяет моделировать взаимодействие гидробионтов со всеми видами орудий рыболовства. Орудия рыболовства создают акустическое, химическое и визуальное поле. Акустическое поле будет зависеть от конструкции орудий рыболовства и действия на него водной среды. Химическое поле создается элементами орудий рыболовства, например, для яруса таким элементов является наживки, которая характеризуется запахами (одорантами), механической структурой (способность освобождать одоранты привлекающие рыб) и ее расположением в водной среде. Это можно отнести и к наживке используемой в различных ловушках. Визуальное поле зависит от окраски и формы элементов орудий лова. Гидробионты для ориентации в пространстве используют три системы рецепторов: обонятельную, акустическую и зрительную, строение которых изучено хорошо. Надо отметить, что в литературе встречаются противоречивые данные по характеристикам рецепторных систем гидробионтов, это объясняется тем, что в зависимости от посторонних сигналов или состояния гидробионта, его мозг может тормозить обработку сигналов пришедших от интересующих нас рецепторов. Поэтому при моделировании поведения гидробионта необходимо рассматривать его в виде информационной системы (рис. 1), рассмотрим схему работы такой системы. Из внешней среды поступает информация на рецепторы, где на ее основе рецепеируются образы oi = [O1,O2,..On ], которые поступают по нервной системе в область распознавания. Внешняя среда Генераторы Рецепторы oi Распознавание oir Множество прецедентов Базовые Принятие решения Решающие правила Приобретен ные Базовые Приобретен ные Тезаурус Рис. 1. Схематическая модель саморазвивающейся биологической системы Используя множество прецедентов oip система интуитивно выбирает соответствие образов oi объектам oip , в результате чего происходит генерация информации oir = [O1r ,O2r ,..Onr ], которая передается в область принятия решений, где на основе oir логическим образом выбирается решающее правило. В случае нескольких решающих правил выбирает правило с большей вероятностью, которая зависит от частоты предыдущих выборов решающего правила и их результата. Часть решений может контролировать в тезаурусе информацию, увеличивая множество прецедентов (запоминать) и расширять решающие правила. Контроль информации в таком виде осуществляется на основе базовых решающих правил а, следовательно, индивидуально для каждого моделируемого объекта. Обучение такой информационной системы происходит на основе данных экспериментов с предварительной их обработкой. Систему рецепторов представим в виде генераторов электрических сигналов, возбуждение которых зависит от воздействий внешних источников, при этом остановимся на основных органах чувств, таких как зрение и слух. Рассмотрим характеристики зрения лососей, которые обладают монокулярным зрением – обработка информации для каждого глаза, производится самостоятельно, при пересечении области видения глаз образуется зона бинокулярного зрения. Лососи, обитают в небольшом поверхностном слое до 20-30 м, способны различать форму и раскраску жертвы. Поэтому они относятся к дихроматам воспринимающим три разных цвета, одни колбочки реагируют на красный цвет, другие — на зеленый, третьи — на синефиолетовый цвет, что можно представить в виде схемы (рис. 2). Палочка Глазной нерв Колбочка К Колбочка З Колбочка СФ Палочка Рис. 2. Схема передачи информации от зрительных рецепторов по нервной системе Работу рецепторов воспринимающих акустические сигналы рассмотрим на примере боковую линию, так как с помощью ее рыбы определяют расстоянии до жертвы. Боковая линия имеет волоски, которые воспринимают малейшие колебания молекул воды (рис. 3). 1 2 a U , мB 80 б 0 O 80 t U , мB 80 A 0 80 t U , мB 80 B 0 80 t Рис. 3. Модель боковой линии или ропалия: а – схема боковой линии или ропалия: 1 – нервная система; 2 – чувствительные волоски; б – изменения сигнала в зависимости от положения волоска Изменения напряжения U в нервной системе связывающей волоски с головным мозгом зависит от положения волоска, которое запишем в виде: (1) U = U 0 (1 - sin j ) ; j = wt , j Î (- p / 2; p / 2) где U 0 – первоначальное напряжение в нервной системе; j – угол, характеризующий положение волоска. Таким образом, система (1) позволяет моделировать колебания волоска боковой линии у рыбы, а также моделировать колебания волоска эктодермального эпителия у медуз, которые позволяют им фиксировать акустические колебания. Крабы также имеют чувствительные волоски, фиксирующие акустические колебания, но расположенные на нескольких площадках панциря. Для моделирования рецепторов равновесия медуз – статолитов или рыб - отолитов, используем систему (1). Известковая конкреция (для медузы) и отолитный камень (для рыб) в зависимости от положения гидробионта будет замыкать контакт с соответствующей пластиной (рис. 4) при этом каждый волосок ропалия или боковой линии и пластинка статолита передает сигналы по нервной системе гидробионта. 2 1 3 Рис. 4. Модель статолита (отолита): 1 – нервная система; 2 – чувствительные волоски; 3 – известковая конкреция (камень отолита) Таким образом, поведение гидробионта можно представить в виде алгоритма, на примере медузы (рис. 5). Он реализован следующим образом, от рецепторов (блоки 1, 4, 7) информация поступает в соответствующие нервные ганглии (блок 2, 5, 8). Нервные ганглии распознают информацию и предают дальше по нервной системе. В зависимости от распознанного образа из блоков 2 информация передаются в блок 6 и на мышцы зонтика медузы (блок 3). Блок 8 передает информацию сразу в блок 3, а из блок 5 сигналы поступают сразу в блок 6. Блок 6 представляет собой систему принятия решений устроенную по схеме (см. рис. 2.6), где в зависимости от информации пришедшей из блоков 2 и 5 генерируется информация, которая может поступать на блок 3. 3 1 2 6 4 5 8 7 Рис. 5. Система обработки информации у медузы [3]: 1 – рецепторы акустических сигналов; 2 – нервные ганглии, обрабатывающие информацию от блока 1; 3 – мышцы зонтика медузы; 4 – рецепторы равновесия (статолиты); 5 – нервные ганглии, обрабатывающие информацию от блока 4; 6 – блок принятия решений; 7 – зрительные рецепторы; 8 – нервные ганглии, обрабатывающие информацию от блока 7 Литература 1. Габрюк В.И. Кулагин В.Д. Механика орудий рыболовства и АРМ промысловика. – М: Колос, 2000. – 416 с. 2. Розенштейн М.М. Проектирование орудий рыболовства. – Калининград: КГТУ, 2003. – 367 с. 3. Осипов Е.В. Информационные технологии в рыболовстве. Уч. пос. Владивосток: Дальрыбвтуз, 2005. - 78 с.