Использование уточненной эфемеридно
advertisement

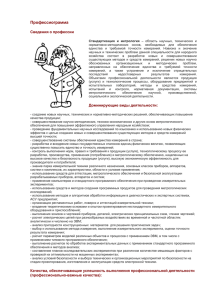
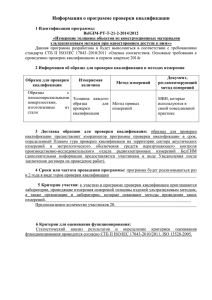
Использование уточненной эфемеридно-временной информации для высокоточного определения координат потребителя в глобальных навигационных спутниковых системах Сведения об авторе ПОДКОРЫТОВ Андрей Николаевич, аспирант Московского авиационного института (государственного технического университета). Адрес: Ул. Константина Царева, 12, комн.512, Москва, 125080; тел.: 8-926357-32-54; e-mail: thepompous@gmail.com Аннотация В статье рассматривается алгоритм высокоточного местоопределения в абсолютном режиме по сигналам глобальных навигационных спутниковых систем c использованием уточненной эфемеридновременной информации. Приводятся результаты экспериментального исследования разработанного алгоритма и результаты сравнения с международными сервисами высокоточного местоопределения. Описывается компенсация систематических смещений в исходных измерениях псевдодальностей и псевдофаз, а также использование высокоточной эфемеридно-временной информации. Ключевые слова: глобальные навигационные спутниковые системы, ГЛОНАСС, GPS, PPP, высокоточное местоопределение, координаты Введение Местоопределение с высокой точностью широко применяется при организации дорожного движения, автоматическом управлении техникой, контроле деформации сооружений и во многих других приложениях. Известны относительные или дифференциальные методы спутниковой навигации. Дифференциальные методы спутниковой навигации позволяют уменьшить погрешность измерения псевдодальности до единиц метров [1]. Использование при относительном местоопределении псевдофазовых измерений (RTK) обеспечивает возможность определения относительных координат с точностью до нескольких мм. Ограничением при этом является необходимость наличия опорной станции с известными координатами. Известны также методы широкозонной дифференциальной коррекции, в которых потребителю отсылается информация о параметрах движения спутников и ионосфере, что обеспечивает возможность местоопределения с точностью около метра [2]. Функционирование такой системы предполагает наличие сети опорных станций. Такие системы функционируют в США (WAAS) и Европе (EGNOS), развертывается система в России (система дифференциальной коррекции и мониторинга, СДКМ) [3]. Ограничивающим фактором рассмотренных методов является использование информации от опорных станций. В этой связи, ставится задача разработки алгоритма местоопределения в абсолютном режиме с высокой точностью. В статье рассматривается алгоритм высокоточного местоопределения по сигналам ГНСС (ГЛОНАСС, GPS) в абсолютном режиме, не требующий измерений с опорных станций. Высокая точность местоопределения при этом обеспечивается использованием высокоточной эфемеридно-временной информации и компенсацией систематических смещений в исходных измерениях псевдодальностей и псевдофаз. Математические модели исходных измерений В алгоритме высокоточного местоопределения используется два вида измерений навигационных приемников – псевдодальность и псевдофаза. Методы формирования этих измерений изложены в [5 – 6]. Сложности их использования в абсолютном режиме связаны с наличием в измерениях ряда систематических смещений, которые должны компенсироваться с помощью математических моделей. Математические модели измерений псевдофазы и псевдодальности описывают связь измерений с координатами приемника, показаниями его часов на момент проведения измерений, координатами навигационного спутника и показаниями часов спутника на момент времени, который предшествует моменту измерения на время распространения сигнала. Математические модели измерений псевдодальностей j и псевдофаз j описываются следующими зависимостями [5 – 6]: j j j j j j j j R j R orbit R apc c Tclock Trel hard iono c trop dj , mult d j solidearthtide d j oceantideloading d j poletide R apc c Tclock hard , (1) j j j j R apc R wind R j R orbit up j j j j f j Tclock Trel Tgrav hard 0j j j j j j j j c trop iono d j , mult dsolidearthtide d oceantideloading d poletide R apc , (2) j j j f Tclock hard 0 M j – измеренное значение псевдодальности для j-го спутника (м), j – измеренное значение псевдофазы для j-го спутника (циклы), R j – расстояние между фазовым центром антенны приемника и j центром масс j-го спутника, R apc – систематическое смещение дальности R j из-за смещения фазового где j центра антенны j-го спутника относительно его центра масс, Trel – релятивистская поправка к j показаниям часов j-го спутника, порождаемая эллиптичностью его орбиты, j , iono – тропосферная trop j и ионосферная задержки сигнала j-го спутника, Tgrav – систематические смещения измерений псевдофазы по j-му спутнику, порождаемые гравитационным эффектом, M j – неопределенное целое число, определяющее целочисленную неоднозначность измерения псевдофазы по j-му спутнику j j j , doceantideloading , d poletide dsolidearthtide систематические смещения измерений по j-му спутнику, порождаемые приливами в упругом теле Земли, океаническими приливами и полярными приливами, соответственно (остальные слагаемые моделей (1) и (2) описаны в [5-6]). Высокоточная эфемеридно-временная информация Одним из двух важнейших условий достижения высокой точности местоопределения в абсолютном режиме является использованием эфемеридно-временной информации высокой точности. Под высокоточной эфемеридно-временной информацией, понимаются прогнозные либо уточненные по реальным измерениям спутниковые орбиты (координаты спутников с временной привязкой) и временные поправки к показаниям спутниковых часов. Международной службой ГНСС (International GNSS Service, IGS) в настоящее время [7] разработаны алгоритмы оценки этих параметров с высокой точностью. Точность эфемеридно-временной информации IGS связана с задержкой ее формирования. Службой IGS предоставляется 4 варианта эфемеридно-временной информации: сверхбыстрая (прогноз), сверхбыстрая (оценка), быстрая и финальная. Компенсация основных систематических смещений в исходных измерениях Вторым важнейшим условием достижения высокой точности местоопределения в абсолютном режиме является компенсация большого числа эффектов, вызывающих систематические смещения в измерениях псевдодальностей и псевдофаз. Ионосферная задержка распространения сигнала компенсируется за счет использования линейных ионосферосвободных комбинаций измерений. Тропосферная задержка распространения сигнала компенсируется за счет использования ряда тропосферных моделей, в которых выделяются сухая и влажная составляющие вертикальной тропосферной задержки. Гравитационная и релятивистская задержки распространения сигнала, а также задержка, связанная с взаимной ориентацией антенн спутника и приемника (эффект wind-up), вычисляются по известным формулам [4]. Эффект многолучевости, как правило, подавляется применением антенн специальной конструкции (например, choke ring). j j j Приливные эффекты, вызывающие систематические смещения dsolidearthtide , d poletide , doceantideloading в измерениях псевдодальностей и псевдофаз, заключаются в периодическом смещении областей на поверхности Земли под воздействием, главным образом, гравитационного влияния Луны и Солнца. Учет твердотельных приливов производится с использованием сферических гармоник, которыми представляются возмущения в гравитационном потенциале Земли [8]. Для количественного описания смещений приемника, вызванных океаническими приливами, используется модель Швидерского, учитывающая 11 приливных компонент. Алгоритм высокоточного определения координат потребителя На начальном этапе работы алгоритма производится анализ исходных измерений и отбраковка спутников. Причиной для отбраковки спутника может послужить отсутствие тех или иных измерений, низкий угол возвышения спутника либо аномальные измерения. На следующем этапе реализуется процедура обнаружения скачков и разрывов измерений псевдофазы. Для этих целей используются комбинации измерений Мельбурна-Вуббена и так называемые безгеометрические комбинации. Далее производится компенсация систематических смещений в измерениях псевдодальностей и псевдофаз в соответствии с математическими моделями (1) и (2). Непосредственное определение координат потребителя осуществляется после вычисления максимально правдоподобного вектора оцениваемых параметров в фильтре Калмана. Процедура максимально правдоподобного оценивания при этом распадается на процедуру прогноза и процедуру вычисления текущей оценки. В вектор оцениваемых параметров в фильтре Калмана входят: оценка смещения показаний часов приемника относительно показаний часов системы, вычисленные оценки поправок к грубым координатам приемника потребителя, оценка влажной составляющей вертикальной тропосферной задержки и оценки действительных неоднозначностей измерений псевдофазы отслеживаемых спутников. Исходными данными для алгоритма высокоточного местоопределения являются измерения в формате RINEX, высокоточная эфемеридно-временная информация в форматах Sp3 и Clk, стандартизованный файл формата ANTEX, грубые грубые координаты потребителя, параметры вращения Земли (смещения координат полюсов на текущую дату) и значения гармоник океанических приливных компонент модели Швидерского в формате GOT00.2 для района расположения потребителя. Экспериментальные результаты работы алгоритма В первой части эксперимента исследовалась зависимость точности вычисленных оценок координат потребителя от длительности интервала обработки. Обрабатывались измерения станции “TIXI” сети IGS, расположенной на территории России в поселке Тикси. В качестве эталонных использовались высокоточные координаты станции, вычисленные службой IGS. Для обработки измерений на 11 января 2011 года использовалась финальная эфемеридно-временная информация службы IGS. Вычисленные оценки координат сравнивались с результатами обработки того же файла измерений несколькими международными сервисами, предоставляющими услугу высокоточного местоопределения через Интернет: APPS (США), GAPS (Канада), magicGNSS (Испания), NRCan (Канада). На рисунке 1 приводятся зависимости средних 3D-ошибок 3DER при работе по измерениям системы GPS для разработанного алгоритма (график “PPP”) и указанных международных сервисов от длительности интервала измерений в часах. 3D-ошибка вычисляется согласно выражению 3DER 2 ET 2 2 YET Y ZET Z , (3) где ET , YET , ZET - эталонные высокоточные координаты станции, ,Y, Z - вычисленные оценки координат станции. Средняя 3D-ошибка 3DER вычисляется согласно выражению N 3D ER i , (4) N - 3D-ошибка в i-ом опыте на интервале измерений заданной длительности, N – число опытов 3D ER i 1 где 3D ER i высокоточного местоопределения на интервале измерений заданной длительности. Повышение точности разработанного алгоритма на малых интервалах измерений может быть достигнуто путем использования эфемеридно-временной информации с меньшим временным дискретом (менее 5 минут). Рисунок 1. Зависимость средней 3D-ошибки местоопределения от длительности интервала измерения. Результаты сравнения по точности с международными сервисами. Во второй части эксперимента исследовалась зависимость точности местоопределения от точности используемой эфемеридно-временной информации. Сравнивались четыре различных точности эфемеридно-временной информации системы GPS. На рисунке 2 приводится диаграмма зависимости 3Dошибки местоопределения для разработанного алгоритма от точности эфемеридно-временной информации. Рисунок 2. Точность местоопределения при использовании эфемеридно-временной информации различной точности Заключение Представленный алгоритм высокоточного определения координат потребителя в абсолютном режиме по сигналам ГНСС реализован и отлажен в кодах языка программирования С++. Как видно из представленных экспериментальных результатов обработки (Рисунки 1-2), в настоящее время достигается точность определения местоположения статического потребителя 1 см и менее в процессе постобработки. Планируется дальнейшее совершенствование алгоритма путем использования коррекции скачков и разрывов измерений псевдофазы, учета особенностей обработки измерений системы ГЛОНАСС и реализации режима кинематики. 1. 2. 3. 4. 5. 6. 7. 8. Библиографический список Kaplan E.D. Understanding GPS: Principles and Applications. Second edition, Artech house, 2006. – 703 с. Ю.А.Соловьев. Спутниковая навигация и ее приложения. – М.: Эко-Трендз, 2003. – 326 с. В.В. Дворкин, С.Н. Карутин, П.Б. Глухов. Анализ состояния и перспектив развития технологии высокоточного местоопределения по сигналам ГНСС. Информационно-измерительные и управляющие системы. Радиотехника, Москва. №3, 2011г. Jan Kouba. Guide to using international GNSS service (IGS) products. Geodetic Survey Division. Natural Resources Canada. May 2009. http://igscb.jpl.nasa.gov/components/usage.html. А.А. Поваляев. Спутниковые радионавигационные системы. Время, показания часов, формирование измерений и определение относительных координат. «Радиотехника», Москва, 2008. – 328 c. Global Positioning System: Theory and Applications. Volume I, and II. Edited by Parkinson B. W. and Spilker J. J. PROGRESS IN ASTRONAUTICS AND AERONAUTICS Volume 163. Published by the American Institute of Aeronautics and Astronautics, Inc. 370 L’Enfant Promenade, SW, Washington, DC 20024-2518, 1996. International GNSS service strategic plan 2008-2012. IGS Central Bureau, eds. Pasadena, CA: Jet Propulsion Laboratory, 2008. ftp://igscb.jpl.nasa.gov. Спутниковые системы мониторинга. Анализ, синтез и управление. В.В.Малышев, М.Н.Красильщиков, В.Т.Бобронников, О.П.Нестеренко, А.В.Федоров. Под ред. В.В.Малышева. – М.: Изд-во МАИ, 2000. – 568 c.