Пендюров Н
advertisement

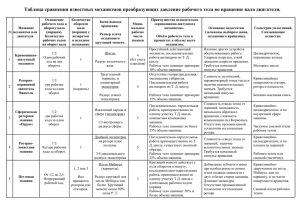
Пендюров Н.Н. Ввиду особой значимости Автором принимается решение о свободном доступе к изобретению. Изобретение ״Пороговое ״- определяющее получение людьми неограниченного источника энергии не требующего передачи на расстояние. Предоставлены: - данное разъяснение лист 1-2-3-4 кинематическая схема лист 5 (54) ПРЕОБРАЗОВАТЕЛЬ МОЩНОСТИ (КРУТЯЩЕГО МОМЕНТА), С ФУНКЦИЯМИ БЕЗСТУПЕНЧАТОЙ КОРОБКИ ПЕРЕДАЧ Преобразователь мощности (крутящего момента) с функциями бесступенчатой коробки передач предназначен для всегда многократного увеличения мощности приводов с соответствующими скоростями вращения, отличающийся тем, что, с целью увеличения мощности, имеет несущий распределительный вал (17), на котором расположены на подшипниках соединенная из двух шестерен деталь крепления устройства (1), соединенная шестерня с зубчатым коническим колесом (2), конические шестерни (4,5), цилиндр, соединенный с коническим колесом, находящимся в его рабочем пространстве (3,7), опорная неподвижная шестерня (6), в свою очередь в цилиндре равноудаленные от центральной оси и от друг друга на подшипниках дополнительные валы (15,13) с неподвижно сидящими на них шестернями (8,9,10,11,12,14) связанные зубчатым зацеплением с шестернями распределительного вала (1б,2а,6), кроме того, конические шестерни (4,5) связывают зубчатым зацеплением соединенную шестерню с коническим колесом (2) с соединенным коническим колесом цилиндра (7), приведенные в описании соотношения делительных диаметров шестерен, конусных шестерен, конусных колес, находящихся в зубчатом зацеплении, определяют взаимосвязь взаимного вращения деталей для достижения результата выбранным количеством дополнительных валов с шестернями. Разъяснение: Устройство может работать только в рамках задаваемых соотношений делительных диаметров шестерен находящихся в зубчатом зацеплении (смотри кинематическую схему) д 6/ д 10 = 2/1, д 9/ д 2а =1/1, определяющих работу механизма только в рамках равенства угловых скоростей вращения дополнительных валов с их шестернями и детали 7. Остальные соотношения высчитываются конструктором исходя из расчета силовой плоскости задаваемой параметрами (нужными) скоростей вращения выдаваемых, соотношением д 8 к д 1б при этом д 8 никогда не должна быть больше либо равна д 1б. Устройство представляет собой сочлененный линейный рычаг, в котором соотношения приложения сил определяются соотношениями приложения длин рычагов в соответствии с "Законом сохранения энергии" для получения энергии свыше 100% от энергии, затрачиваемой, с сохранением скорости вращения привода. 1. Для тех, кто не может понять изобретение - привожу размеры в условных единицах оптимального, работоспособного устройства и обозначение линейных рычагов деталей (силовых линий) Д-(деталь, шестерня)-делительный диаметр шестерен и цилиндра (по осям вращения дополнительных валов) линия проходящая через центр вращения до точек (ки) зацепления шестерен - есть линейный рычаг. R - радиус делительного диаметра - есть линейный рычаг. Устройство имеет пять дополнительных валов для компенсации максимальных силовых ускорений вращения линейного рычага и две конусные шестерни для стабильно сбалансированной работы. - Делительный диаметр приложения момента вращения привода равен =д 6=д 2б=д 3=144, д 8=107, д 1б=109, д 9=108, д 2а=108, д 10=д 4=д 5 = 72. - д 2а / ((д 1б - д 8) ∙ 2) = 27 - формула, определяющая минимальную скорость вращения, выдаваемую механизмом по отношению к скорости вращения привода 27/1. 2. Перед вами кинематическая схема: - смещение дополнительного вала по окружности относительно точек зацепления шестерен дает минимальный момент скорости вращения д 8=д 1б/д 8=1,01869. Через дополнительный вал и шестерню 10 идет навстречу вращению опорной шестерни д 6. В точке зубчатого зацепления шестерен д 6 с д 10 создавая восстановление момента вращения д 6 - с 0,5 до 1. Это есть плоскость, проходящая по осевой линии - или линия сочлененного рычага, проходящая через центральную ось вращения распределительного вала, до оси дополнительного вала оставляя впереди точку приложения момента вращения устройства точка зацепления- д 8 с д 1б и с другой стороны точку упора - точка зацепления д 9 с д 2а. Смещение дополнительного вала обеспечивает момент первоначального сдвига д 9/д 8=1,009345. Между точкой зубчатого зацепления д 8 с д 1б и сочлененным линейным рычагом устройства находится момент вращения 1,01869; - Между точкой зубчатого зацепления д 9 с д 2а и сочлененным линейным рычагом находится момент первоначального сдвига 1, 009345; Соотношение 0,01869/0,009345=2/1, делит R 9-R 8=0,5 в пропорции 0,333/0,166 - через эту точку проходит осевая линия - это точка равновесия сочлененных рычагов. Это точка приложения моментов вращения сочлененных рычагов - ведь приложение момента вращения устройства это приложение линии через момент скорости вращения шестерни 8 в точку зацепления д 8 с д 1б. 3. Вышеуказанное соотношение 0,01869/0,009345=2/1=R 10/(R 9-R 10)= =R 7/R 2a = д 6/д 10=д 2б/д 4 делит момент вращения привода 100% - 33,333% на д 6 - 33,333% на д 7 - 33,333% на д 2б В результате - момент вращения д 2=33,333% ∙ R 2б/R 2а = 33,333% ∙ 1,333% = 44,44%, - момент смещения дополнительного вала по окружности - момент вращения д 6 = 33,333% 33,333% / (д 8 / д 10) , 33,333% / 1,486% = 22, 43% 4. Находим длину линейного рычага: - Это R 8 + R 9 к 2/3 (R 9 - R 8) , (53,5+54)/0,333 = 322,8 Находим длину рычага упора: - Это R 2а к 1/3 (R 9-R 8) , (54/0,166) = 325,3 Находим момент вращения линейного рычага: - 22,43% ∙ 322,8 = 7240,4% Находим момент вращения упора: 44,44% ∙ 325,3 = 14454,9% Находим момент вращения устройства (сочлененного линейного рычага) с сохранением скорости вращения привода: (14454,9%+7240,4%)/4=5423,825% 5. Из выше отмеченного понятно - определяет момент вращения устройства момент скорости вращения шестерни 8, величину которого определяет величина сопротивления вращению устройству, создающая величину первоначального момента сдвига отклоняя приложение момента вращения привода с оси вращения д 4 в точку зубчатого зацепления д 4 с д 3, создавая вектор отклонения. Его величина это - √(R 42+ R 32)=80,49844719 6. Определяем величину сочлененного линейного рычага в данный момент 80,49844719 ∙ 3,009345=242,2475 его величина - это величина момента скорости вращения увеличивающая вектор отклонения в 3 раза исходя из соотношений делительных диаметров шестерен находящихся в зубчатом зацеплении. Отсюда: момент вращения устройства равен 22,43% ∙ 242,2475=5433,6%; (5423,825 + 5433,6)/2=5428,725 %с сохранением скорости вращения привода от 100% привода. 7. Длина окружности д 8 всегда меньше д 1б. Устройство всегда выталкивает впереди себя длину окружности д 1б не укладывающуюся в равенство угловых скоростей устройства - этим автоматически выполняет функции бесступенчатой коробки передач исходя из величины сопротивления вращению. 8. Работа сочлененного рычага это приложение моментов вращения в плоскости, при минимальной скорости вращения моменты вращения совпадают. R 9 + R 8 с R 7 и R 10 + R 6 поэтому не увеличивают друг друга (работает величина R 7 равная величине вектора отклонения в данный момент) 9. Момент максимального сопротивления вращению создает максимальную величину рычага R 9 + R 8 + R 7*2 + (R 10 + R 6) *2=539,5 539,5 * 3=1618,5 Поэтому дабы создать функциональный упор 54/0,166*5=1620; применено 5 дополнительных валов образующих 5 не фиксирующих точек зацепления на шестерне д 2 а со встречным моментом вращения двух не фиксирующихся точек зацепления конусных шестерен на д 2б, создающих момент суммирования несовпадающих рычагов. Обеспечивающих прямой момент ускорения в 63%. 10. Работу устройства определяет техническое условие: класс точности при изготовлении зубчатого зацепления шестерен д 8 с д 1б; д 10 с д 6 - и подобных им должен быть равным между собой, но меньше д 9 с д 2а; д 2б с д 4; д 4 с д 3; и им подобных. Дополнительное разъяснение: Ввиду того, что понимание изобретения требует объемного логического мышления и трудно для восприятия, пробую объяснить простым языком. Глядя на кинематическую схему внимательно, вы увидите, что все точки зубчатого зацепления шестерен находятся в одной плоскости. Мысленно разверните ее на 900 - перед вами линия, на которой нет совпадающих точек зацепления шестерен в одном месте, это значит что нет линии излома плоскости. Лишь есть возможность движения дополнительного вала с его неподвижными шестернями по окружностям шестерен распределительного вала. Это означает, что момент вращения Д 7 упирается в предел нагрузки и не может двигаться по окружности с двойным моментом скорости вращения без момента вращения Д 6. Иначе: момент вращения Д 7 равен моменту вращения Д 6 на оси дополнительного вала (33,33/3*2 и умноженное на момент первоначального сдвига.) Сдвигает осевую линию (или линию сочлененного рычага) момент вращения Д 6 через момент первоначального сдвига, приложенный на Д 2, вращая конусную шестерню через ось вращения Д 4. Запомните, что момент первоначального сдвига - это продолжительность действия, а следовательно и приложения величины (больше или меньше) сопротивления вращению. Осевая линия двигается по окружности со скоростью пропорциональной величине первоначального момента сдвига (сопротивления вращению). Момент вращения, приложенный на оси вращения Д 4, воздействует только перпендикулярно на плоскость вращения Д 4. Если продолжить ось вращения Д 4 до величины вектора отклонения, отмеченная точка и будет местом его приложения. Для тех, кто не понимает: на кинематической схеме из точки зацепления Д 10 с Д 6 проведите линию параллельную центральной оси распределительного вала на пересечении R 9 поставьте точку, это точка приложения момента вращения Д 6. Величина первоначального момента сдвига меняет момент скорости вращения осевой линии, то есть увеличивается разность скоростей вращения осевой линии и распределительного вала (Д 6). В результате через Д 10 R 7 на оси распределительного вала получает упор, увеличивая общую длину сочлененного рычага. Так как первоначальный момент сдвига переводит приложение моментов вращения распределительного вала с вдоль силовых линий - по окружностям шестерен распределительного вала - максимальная величина сочлененного линейного рычага - это вектор отклонения, умноженный на максимальную величину первоначального момента сдвига, умноженную на Пи и умноженную на две величины окружности к 2/3 R 9 - R 8. (2,01869*80,49*3,14*2) / 0,333. В установках для получения электроэнергии нет динамических ударов сопротивления вращению или резкой смены приложения величины момента вращения привода, увеличивающих одномоментно первоначальный момент сдвига в 2 раза. Поэтому в устройствах для производства электроэнергии количество дополнительных валов существенной роли не играет. Для установок транспортных средств динамические удары, кинематическая энергия транспортного средства, кинематическая энергия Д 7 с дополнительными валами снижает функциональные свойства устройства (потери скорости движения, неравномерность движения, медленное ускорение движения и т.д.). Это устраняется количеством дополнительных валов, переводящих величину упора линейного рычага R 2а в величину Д 2а, и в зависимости от момента величины сопротивления вращению переводит рычаг упора на длину окружности Д 2а. Если что-то не понятно, не нужно делать скоропалительных выводов. Вы можете позвонить автору и выяснить все вопросы. Простота и гениальность конструкции позволяет сделать простейшую модель (конструктор) и убедиться в ее работоспособности в своих руках. Работа изобретения подтверждена практическим испытанием! Прошу обращаться по телефонам: 89149635136 и 89149650079, по электронной почте, E-mail: vladimir.pendyurov@mail.ru или на мой почтовый адрес: Приморский край., с. Анучино, ул. Юзефовича 27 кв.2 Пендюрову Николаю Николаевичу. 692300.