Л а б о р а т о р н... ИССЛЕДОВАНИЕ МЕХАНИЧЕСКИХ СИЛ В МАГНИТНЫХ
advertisement

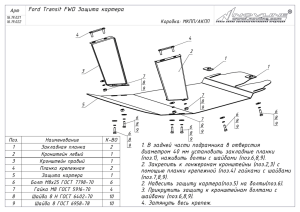
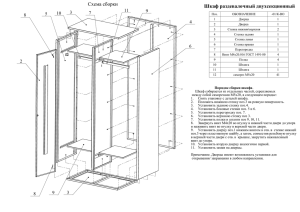
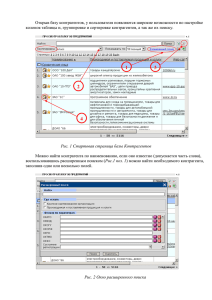
Л а б о р а т о р н а я р а б о т а № 60 ИССЛЕДОВАНИЕ МЕХАНИЧЕСКИХ СИЛ В МАГНИТНЫХ ПОЛЯХ В ВОЗДУШНОМ ЗАЗОРЕ МАГНИТОПРОВОДА ЭЛЕКТРОМАГНИТА 1. Краткое содержание работы В работе исследуется механическое проявление действия магнитных полей в воздушном зазоре магнитопровода в зависимости от величины зазора, силы тока, возбуждающей магнитное поле, и формы воздушного зазора. Расчетные данные сравниваются с экспериментальными. 2. Описание установки 2.1. Вводные замечания Механические силы в магнитном поле широко применяются в технике при создании электромагнитов, составляющих основу различного рода электромагнитных реле, муфт сцепления и т.п. В данной работе механические силы в магнитном поле исследуются на базе электромагнитной муфты. В основе ее конструкции – электромагнит с магнитопроводом броневого типа, состоящим из стального полого цилиндра, замыкающегося через стальные крышки в торце на центральный стержень. Часть этого стержня жестко прикреплена к одной крышке торца цилиндра, а другая часть может перемещения в крышке противоположного торца. В технике стальной цилиндр с неподвижной частью центрального стержня называют станиной, неподвижную часть центрального стержня – стопом, а подвижную часть центрального стержня – якорем. В дальнейшем будем пользоваться этой терминологией. Стоп установлен в катушке электромагнита. При протекании тока по катушке в магнитопроводе возникает магнитная индукция, под воздействием которой якорь притягивается с стопу, перемещаясь вдоль силовых линий магнитной индукции. Воздушный зазор между стопом и якорем обеспечивает возможность перемещения якоря. При вертикальном размещении цилиндра станины, а якоря – в нижней его части силы в магнитном поле, притягивая якорь, совершают работу по преодолению силы тяжести (будем говорить – веса) якоря. Такое устройство при возможности предварительной установки величины воздушного зазора между стопом и якорем и изменения силы тяжести, воздействующей на якорь, позволяет осуществить исследование механических сил в магнитном поле. В технике такие исследования называют исследованиями тяговых усилий электромагнита. Регулирования веса якоря возможно достичь как механически (например, используя гири или пружины, либо используя механические силы 82 второго электромагнита. Второй путь более удобен в практике эксперимента, так как позволяет плавно регулировать эффективный вес якоря изменением тока во втором электромагните. Однако, для реализации этого варианта необходимо предварительно установить соответствие между силой тока во втором электромагните и эффективным весом якоря. Кроме того, для обеспечения и упрощения возможности расчета механических сил в исследуемом зазоре магнитопровода первого электромагнита в установке необходимо «развязать» силовые линии индукции первого и второго магнитопроводов (магнитопроводов основного электромагнита и вспомогательного), обеспечив между ними (а по существу на отрезке якоря, входящего как в первый, так и во второй электромагниты) участок с большим магнитным сопротивлением. Это можно обеспечить как за счет создания в якоре немагнитного отрезка, так и (и это реализовано в установке) за счет резкого уменьшения сечения стержня якоря в месте разветвления магнитных потоков, созданных катушками обоих электромагнитов. 2.2. Состав установки Конструкция лабораторного устройства представлена на рис. 1. Оно состоит из двух блоков: стойки измерительной (поз. 1) и блока питания (поз. 2), электрически соединенных кабелем (поз. 3) посредством разъема. Стойка измерительная содержит основной (первый) прямоходовой цилиндрический электромагнит постоянного тока, состоящий из катушки (поз. 4), магнитопровода (поз. 5) и двух комплектов цилиндрических стержней с плоскими (стоп – поз. 6), (якорь – поз. 7) и коническими (стоп – поз. 8, якорь – поз. 9) наконечниками, образующими воздушный зазор. Вспомогательный (второй) электромагнит – также цилиндрический, постоянного тока (поз. 10), якорь которого является продолжением якоря поз. 7 или поз. 9. В отличие от реальных электромагнитов стоп в первом электромагните (для решения исследовательских задач) установлен на его станине с помощью резьбового соединения, для чего жестко укреплен в резьбовой головке (поз. 11), поворотом которой измененяется воздушный (рабочий) зазор при исследовании механических сил в магнитном поле (снятии тяговой характеристики). На головке (поз. 11) имеется поясок (поз. 12), на который нанесена шкала, а для отсчета величины зазора служит визир (поз. 13). На крышке второго электромагнита (поз. 10) закреплен конечный выключатель (поз. 14), на который в своем нижнем (исходном) положении опирается якорь. Выключатель электрически связан со светодиодными индикаторами положения якоря. Блок питания содержит цепи питания и регулирования токов обоих электромагнитов и амперметры для измерения величин этих токов. 83 Рис. 1 На лицевой панели блока расположены: - кнопки «Пуск» (поз.15) и «Стоп» (поз.16) цепей управления; - ручка регулирования тока «Io» (поз.17) первого электромагнита; - ручка «Нагрузка» (поз.18) регулирования тока в вспомогательном (втором) электромагните. - амперметр «Нагрузка» (поз.19) для измерения тока вспомогательного (второго) электромагнита; - амперметр «Ток объекта» (поз.20) для измерения тока основного электромагнита, 84 - тумблер (поз.22) и индикатор (поз.23) “сеть”; - индикаторы (лампочки) нижнего и верхнего (поз.24) положений якоря, - кнопка «Размагничивание» расположена на задней стенке блока и предназначена для подключения основного электромагнита к цепи переменного тока для снятия остаточного намагничивания якоря после каждого измерения. Шкала амперметра “Нагрузка” (поз. 19) отградуирована в миллиамперах. Величина механической силы (в ньютонах), приложенной к якорю основного электромагнита, соответствующая показаниям амперметра «Нагрузка», определяется по табл. 1. Значения силы в таблице учитывают собственный вес якоря. Таблица 1 IН, мА F, Н 0 4 10 6 20 21 30 44 40 65 50 90 60 113 70 135 80 158 90 180 100 195 2.3. Процесс измерения Для проведения измерений необходимо подготовить установку: - установить органы управления блока питания-измерения в исходное положение, т.е. рычаг тумблера «Сеть» (поз. 22) – в нижнее положение, ручки «Регулирование тока «Io» (поз. 17) и «Нагрузка» (поз.18) повернуть против часовой стрелки до упора. - повернуть головку (поз. 11) стопа на стойке по часовой стрелке до упора, при этом метки нуля на шкале и визире должны совместиться. Процесс измерения на установке влючает следующие операции: 1. Включение тумблера «Сеть» (поз. 22), после чего загораются индикаторы «Сеть» (поз. 23) и нижний индикатор (поз. 24) положения якоря. 2. Установка воздушного зазора с помощью головки (поз. 11) стопа. 3.Установка веса якоря основного электромагнита с помощью регулятора (поз. 18) «Нагрузка». Установленное значение записывается. 4. Определение силы тока Iо, необходимого для притягивания якоря к стопу. Эта операции включает последовательно: - нажатие кнопки «Пуск» (поз. 15), - плавное вращение ручки «Регулирование тока Iо» (поз. 17) до момента срабатывания – характерного щелчка и загорания верхней лампочки (поз. 25), - запись тока Iо, соответствующего моменту срабатывания. 5. Возвращение установки в исходное положение для проведения следующего измерения включает: - поворот ручки «Регулирование тока Iо» (поз. 17) против часовой стрелки до упора (в исходное положение), - нажатие на кнопку «Стоп» (поз. 16), - нажатие на кнопку «Размагничивание» один или несколько раз до тех пор, пока якорь не возвратится в нижнее (исходное) положение, подтверждаемое загоранием нижней лампочки (поз. 24). 85 3. Теоретическая справка Механическая сила в магнитном поле выражается в виде производной от энергии магнитного поля по координате [1; 2] : F WM x ( LI 2 ) (2x) , (1) где Wм – энергия магнитного поля; L – индуктивность катушки электромагнита; I – постоянный ток электромагнита. Энергия магнитного поля в зазоре длиной lВ (2) WM BHSl B 2 , где H – напряженность магнитного поля в зазоре; μ0=4π10-7 Гн/м – магнитная постоянная; S – площадь поперечного сечения магнитопровода. Тогда сила, стремящаяся уменьшить воздушный зазор (или притягивающая якорь к стопу) и определяемая производной по направлению перпендикулярному плоскости воздушного зазора (по оси х), согласно (1) WM BH B2 F S S l B 2 2 0 . (3) Формулу (3) можно представить в ином виде, выразив индукцию В в воздушном зазоре через параметры электромагнита. Рассмотрим сначала вариант магнитопровода с постоянным поперечным сечением магнитопровода. Используя закон полного тока для магнитопровода с воздушным зазором в приближении отсутствия полей рассеяния и однородности индукции В магнитного поля в сечении S магнитопровода, можно записать Hl+HBlB=IW, (4) где H B / 0 и H B B / 0 – напряженность магнитного поля в магнитопроводе и в воздушном зазоре; W – число витков катушки электромагнита; I – сила тока в катушке электромагнита; l – длина средней линии магнитопровода. Следовательно, В 0 IW (l / lB ) . (5) Подставив выражение индукции (5) в формулу (3), получим выражение для силы, стремящейся уменьшить воздушный зазор lВ , в виде 0 ( r IW ) 2 S F 2(l r l B ) 2 . (6) В лабораторной установке используется электромагнит броневого типа, у которого площадь поперечного сечения магнитопровода изменяется на различных участках (соответственно изменяется и величина индукции в них 86 при постоянном потоке Ф). Можно выделить три таких участка. Первый – центральный стержень (образованный стопом и якорем), второй – сечение стенок боковой поверхности цилиндра станины и третий – сечение крышек в торцах цилиндра. Нас интересуют площади сечений участков магнитопровода первого (основного) электромагнита (см. рис.1). Площадь Sc поперечного сечения центрального стержня при диаметре 27 мм составляет Sc = 5,72510-4 м2. Площадь Sб поперечного сечения стенок боковой поверхности цилиндра станины, внешний диаметр dБ которого 93,5 мм, а внутренний dМ – 80 мм, составляет Sб =18,4 10-4 м2. Площадь поперечного сечения SТ крышек в торцах цилиндра имеет переменное поперечное сечение, зависящее от радиуса удаления от центральной оси цилиндра. Поэтому напряженность НТ магнитного поля в крышках, определяемая выражением H Т 0SТ , (7) также должна зависеть от радиуса r. Считая поток постоянным вдоль магнитопровода, а SТ =2πrd, где d– толщина крышки, можно записать H Т 0 2rd . (8) Тогда по закону полного тока для броневого магнитопровода rб 2 H T (r ) d r H б lб H clc H BlB IW , (9) rM где H б / 0 S б и H с / 0 S c – напряженность магнитного поля на боковых стенках и в центральном стержне (стопе и якоре); lб и lс – длины средних линий боковой стенки и центрального стержня, каждая приближенно равна 130 мм; rб и rм больший и меньший радиусы крышки в торце цилиндра. Заметим, что при расчете по средней линии магнитопровода rб=(dБ+dM)/4, а rм формально надо принять равным радиусу центрального стержня. Тогда из (9) с учетом (8) получим ln( rб rМ ) d 0 lб / 0 Sб lc / 0 Sc lB / 0 S B . (10) Отсюда индукция в воздушном зазоре основного электромагнита В 0 IW Sc (ln( rб rм ) / d lб Sб lC SC lB SC ) (11) и сила, в соответствии с (3) 0 (IW ) 2 F . 2 S c (ln( rб rм ) / d lб S б lC SC l B SC ) 87 (12) Для основного электромагнита лабораторной установки rб = (93,5+80)/2= 86,75 мм; rм =13,5 мм; d=10 мм; lc = lб = 130 мм; Sc=5,7310-4 м2; Sб =18,410-4 м2; W=4500 витков; μr≈1500. Тогда (12) предстанет в виде 4,56 1010 I 02 F , (360 2,625 103 l B ) 2 (13) где ток в катушке магнитопровода в амперах, lB в мм, а F в ньютонах. Перейдем к рассмотрению случая конических полюсных наконечников стопа и якоря, образующих воздушный зазор основного электромагнита. Такая конфигурация полюсных наконечников позволяет уменьшить потоки рассеяния и применяется в технике. Геометрия конических полюсных наконечников, примененных в лабораторной установке, приведена на рис. 2. Продольное сечение конических полюсных наконечников стопа и якоря: rc=13,5 мм, r=6,75 мм, h=12,5 мм, φ= 61,63о Рис. 2 Проведем расчет силы, действующей на якорь при такой геометрии воздушного зазора. Для этого сначала определим части магнитных потоков, пронизывающих коническую и плоскую поверхности наконечников. Часть полного потока, пронизывающая коническую поверхность Фк=Ф(1–r2/rс2) . (14) Часть потока, пронизывающая плоскую часть полюсного наконечника Фп=Ф(r2/rс2) . (15) Из (14) нормальная к конической поверхности составляющая магнитной индукции BK Ф К SK , (16) где SK – площадь конической поверхности, определяемая выражением S K (rc r ) 2 (1 1 cos ), (17) и энергия, запасенная в конической части воздушного зазора, 88 BK2 WK S K lK , 2 0 (18) где lK –размер воздушного зазора в направлении перпендикулярном конической поверхности, связанный с величиной l B соотношением lK = lB cosφ. (19) Из (18) с учетом (15), (16), (17), (19) получим WK Ф 2 (1 r 2 rc2 ) 2 сos 2 0 (rс r ) 1 1 сos 2 lB . (20) Энергия Wп, запасенная в плоской части поверхности воздушного зазора, в соответствии с (2) равна Wп Ф2r 2 2 0 кс2 . (21) Складывая (22) и (23) и дифференцируя полученное выражение для магнитной энергии по направлению перпендикулярному плоской части поверхности воздушного зазора (по оси х на рис. 3), получаем выражение для силы в поле воздушного зазора при конических полюсных наконечниках. cos 2 (rc2 r 2 ) 2 r 2 FK FSc 4 , 2 4 (сos 1)(rc r ) rc rc (22) где F – сила, действовавшая в плоском воздушном зазоре при том же токе электромагнита, определяемая (12). Из (22) видно, что соотношение сил в вариантах полюсных наконечников определяется произведением cos 2 (rc2 r 2 ) 2 r 2 p Sc 4 2 4 (cos 1)(rc r ) rc rc . (23) Для геометрических размеров рис. 2 p = 5,7310-41103= 0,573. Таким образом, конические полюсные наконечники при одинаковой силе тока электромагнита создают меньшую механическую силу в воздушном зазоре. Однако при этом величина индукции по периметру полюсного наконечника и зазора также уменьшается, что уменьшает поток рассеяния. 4. Подготовка к работе 1. Рассчитать и построить семейство зависимостей силы F в магнитном поле в воздушном зазоре при плоских полюсных наконечниках от величины тока Iо электромагнита для четырех значений lB равных 1, 2, 4 и 6 мм. 89 Расчет осуществить, используя выражение (13), при изменении тока I0 в пределах от 0 до 1 А. 2. Используя данные расчета п. 1, построить зависимости силы тока I0 электромагнита, необходимой для притяжения якоря к стопу, от силы тяжести якоря при четырех значениях lB = 1, 2, 4 и 6 мм. 3. Нанести пунктиром на графики предыдущих пунктов Подготовки аналогичные кривые при конических полюсных наконечниках. Для построения воспользоваться выражениями (22) и (23). 5. Рабочее задание 1. Установить в «Стойку измерительную» сменные цилиндрические стержни с плоскими полюсными наконечниками. 2. Подготовить установку для проведения измерений (в соответствии с п. 2,3 Описания установки). 3. Произвести измерения зависимостей тока срабатывания I0 основного электромагнита от эффективной силы тяжести якоря (тока во втором электромагните) при величинах воздушного зазора lB, равных 1, 2, 4, 6 мм. Рекомендуется, установив значение lB, снимать зависимость I0(Iн), изменяя ток Iн от 0,01 до 0,1 А с шагом 0,01 А. Для каждого Iн провести 3–4 измерения I0. После каждого перехода якоря в нижнее положение два-три раза нажать на кнопку «Размагничивание». При построении кривых значения I0 усреднить. Данные измерений занести в табл. 2. Таблица 2 lB,мм Iн, А I0’, А I0’’,А I0’’’, А I0 , А F,Н 1 2 4. На графике п. 1 Подготовки к работе нанести экспериментальные точки и оценить степень соответствия результатов расчета и эксперимента. Предложить объяснение наблюдаемых отличий. 5. Установить в «Стойке измерительной» сердечники с коническими наконечниками (поз. 8 и 9 рис. 1). 6. Подготовить установку для проведения измерений (повторив действия п. 2.3 Описания установки). Отметим, что шкала отсчета lB при этом может не совпасть при lB=0 с нулевым значением. Рекомендуется не изменяя положения настройки шкалы отсчета lB воспользоваться при установке требуемого значения воздушного зазора известным соотношением: поворот головки на 360о соответствует изменению lB на 1 мм. 90 7. Измерить зависимости, аналогичные п. 3 Рабочего задания, для величины lB =4 мм . Данные занести в табл. 3, аналогичную табл. 2. При проведении измерений иметь в виду, что якорь с коническим полюсным наконечником намагничивается сильнее и требует больших «усилий» для размагничивания. Рекомендуется одновременно с нажатием кнопки «Размагничивание» временно несколько увеличить воздушный зазор с последующим возвратом к прежнему значению lB,. 8. На расчетные графики п. 3 Подготовки к работе нанести экспериментальные точки и оценить степень соответствия результатов расчета и эксперимента. 6. Вопросы для самопроверки 1. Какие допущения приняты при выводе формул для расчета механической силы в магнитном поле? 2. Как влияет коническая форма полюсных наконечников, образующих зазор в магнитопроводе, на величину силы в магнитном поле в зазоре? 3. Во сколько раз необходимо увеличить силу тока в катушке электромагнита, чтобы сохранить величину механической в его зазоре при переходе от плоских полюсных наконечников, образующих воздушный зазор, к коническим на примере геометрии, используемой в стойке измерительной? 4. Для чего применяются конические полюсные наконечники в электромагнитах? 5. Каким образом в лабораторной работе осуществляется управление эффективной силой тяжести якоря? БИБЛИОГРАФИЧЕС КИЙ СПИСОК 1. Нейман Л.Р., Демирчян К.С. Теоретические основы электротехники. Т.2. Л.: Энергоиздат, 1981. С. 99–104. 2. Бессонов Л.А. Теоретические основы электротехники. Электромагнитное поле. М.: Высш. шк., 1986. С. 126–127. 91