Открыть в doc-формате - Самарский государственный
advertisement

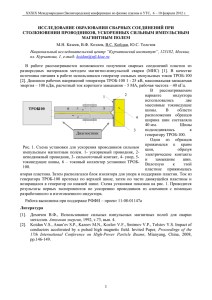
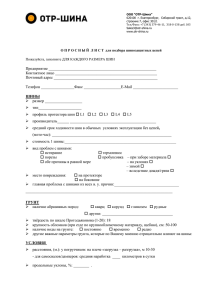
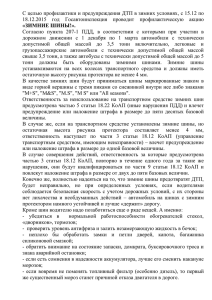
ВЕСТН. САМАР. ГОС. ТЕХН. УН-ТА. СЕР. ТЕХНИЧЕСКИЕ НАУКИ. 2011. № 2 (30) Электротехника УДК 621.316.91 ОЦЕНКА ВЛИЯНИЯ ДОПУЩЕНИЙ НА РЕЗУЛЬТАТЫ МОДЕЛИРОВАНИЯ ПЕРЕХОДНЫХ ПРОЦЕССОВ ПРИ УДАРАХ МОЛНИИ В ВОЗДУШНЫЕ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ Н.И. Гумерова1, Ф.Х. Халилов1, Г.Г. Хохлов1, И.А. Косорлуков2 1 Санкт-Петербургский государственный политехнический университет 195251, г. Санкт-Петербург, ул. Политехническая, 29 2 Самарский государственный технический университет 443100, г. Самара, ул. Молодогвардейская, 244 Сделана оценка степени влияния различных упрощений и допущений в физической модели ВЛ при моделировании переходного процесса от удара молнии. Ключевые слова: моделирование, молния, грозоупорность, количество грозовых отключений. Повышение грозоупорности воздушных линий электропередачи (ВЛ) в настоящее время является актуальной задачей, так как значительная часть суммарного числа отключений линии вызвана грозовой деятельностью. С развитием вычислительной техники для оценки эффективности различных мероприятий по молниезащите появилась возможность применения методик, основанных не только на применении аналитических формул, но и на непосредственном расчете переходных процессов в линиях при ударах в них молнии. При таком подходе к анализу грозовых перенапряжений в ВЛ и эффективности грозозащитных мероприятий невозможно обойтись без ряда допущений в модели линии. В данной статье сделана попытка оценить степень влияния различных допущений на интегральный результат расчета грозоупорности ВЛ – суммарное количество грозовых отключений линии в год. То есть установить, какими элементами схемы расчета переходного процесса при ударах молний в линии можно пренебречь. Для этого в пакете визуального программирования Simulink был создан ряд моделей ВЛ, в котором присутствовали модели, реализующие различные схемы замещения ВЛ. По результатам расчетов в этих моделях можно судить о степени влияния принимаемых допущений. Для выявления степени влияния того или иного фактора в качестве примера были проведены расчеты числа грозовых отключений в год N OTK для ВЛ 150 кВ, выполненной из опор ПБ150-1 (длина пролета 300 м, один молниезащитный трос С70 на Натэлла Идрисовна Гумерова – д.т.н., профессор. Фирудин Халилович Халилов – к.т.н., доцент. Григорий Григорьевич Хохлов – аспирант. Игорь Андреевич Косорлуков – аспирант. 133 вершине опоры, провода АС120/19). Расчеты выполнялись для длины линии 100 км, 100 грозовых часов и без учета АПВ. Для определения значения N OTK в каждой расчетной модели находилась кривая опасных токов (КОТ): для ряда значений длин фронтов импульса тока молнии ф находится минимальная величина амплитуды импульса I max , при которой происходит перекрытие хотя бы одной гирлянды изоляторов на любой из опор моделируемого участка линии. Из этих пар чисел вычислялись скорости нарастания токов молний I ' max . Вероятность перекрытия линейной изоляции находилась путем вычисления двойного интеграла произведения плотностей вероятностей амплитуд и крутизны токов молнии. Эти распределения задавались законом Вейбулла [1]: 1 1 I max . Следует отметить, что P( I I max ) exp I max и P ( I ' I 'max ) exp 26 15,7 при таком определении вероятностей для построения КОТ можно ограничиться с приемлемой точностью для оценки числа отключений тремя точками. Импульс молнии моделируется косоугольным импульсом тока молнии с длиной фронта f , временем полуспада волны t и максимальным значением тока I max . На интегральный показатель числа грозовых отключений наибольшее влияние имеют ф и I max . Стоит отметить, что в практических расчетах задач молниезащиты (за исключением расчета энергоемкости ОПН) моделируется только первый импульс молнии, так как вероятность перекрытия линейной изоляции при воздействии последующих импульсов на порядок меньше [2]. Участки ВЛ между пролетами моделировались многопроводными однородными линиями. Параметры таких многопроводных линий рассчитывались с учетом проникновения электромагнитного поля в землю посредством расчета глубины, на которой находится нулевой потенциал. Данная глубина зависит от удельной проводимости грунта и частоты импульса перенапряжения hE f g , f imp . Расчет hE выполнялся на частоте, характерной для фронта импульса. Потери в земле, определяемые с учетом скин-эффекта, моделировались при помощи асимптотических приближений интеграла Карсона. Данный способ моделирования участка ВЛ достаточно точно отражает связь между проводами и тросами. Отсутствие в методике учета связи между проводами и потерь в земле приводит к ощутимой погрешности в результатах (рис. 1). Импульсная корона на проводах и тросах моделировалась представлением линии в виде последовательных отрезков длиной l k . При превышении напряжения начала короны на каждом из таких участков включается дополнительная сосредоточенная динамическая емкость Сd lk [3]. Значение такой емкости зависит от напряжения на соответствующем участке линии Сd f (U ) . Длину участка линии С d достаточно принять равной 50-70 м. Как только напряжение на фронте волны превосходит напряжение начала короны (200-300 кВ для нерасщепленных проводов), увеличивается сглаживание фронта волны. Таким образом, импульсная корона оказывает существенное влияние на результаты расчета грозоупорности ВЛ. Из рис. 2, а видно, что напряжение на гирлянде изоляторов существенно снижается за счет действия импульсной короны при ударе в ВЛ молнии с коротким фронтом. Однако влияние импульсной короны менее ощутимо при воздействии молний с более пологими фронтами (рис. 2, б). 134 Р и с. 1. Влияние учета потерь в земле и связи между проводами на зависимость N откл от импульсного сопротивления опор при различных значениях удельного сопротивления грунта U , кВ U , кВ г 1200 г 900 1100 800 1000 900 700 800 600 700 600 500 500 400 400 300 300 200 0 0.5 1 1.5 2 2.5 3 3.5 200 0 2 4 6 t, мкс 8 10 t, мкс Р и с. 2. Напряжения на нижней гирлянде изоляторов опоры: a – длина фронта импульса молнии 1,2 мкс; б – длина фронта импульса молнии 8 мкс с учетом импульсной короны; без учета импульсной короны Напряжение на проводе складывается из напряжения, вызванного ударом молнии, и рабочего напряжения. Удар молнии в линию может произойти при любом мгновенном значении фазного напряжения. Переходные процессы, вызванные ударом молнии, почти полностью заканчиваются за время, приблизительно равное 100 200 мкс, поэтому рабочее напряжение можно рассматривать как постоянное во времени u p (t ) const . Расчеты при разных мгновенных значениях рабочего напряжения показали, что мгновенное значение рабочего напряжения изменяет величину N OTK на 1020% (в зависимости от сопротивления заземления опоры). Наибольшее количество 135 отключений происходит, когда на проводе нижней фазы мгновенное значение напряжения имеет полярность, противоположную полярности молнии ( 0 30 ). При разработке методики расчета важным вопросом является минимальное количество опор в модели, позволяющее произвести корректный расчет переходного процесса. Отраженные волны от соседних опор существенно снижают величину напряжения на гирляндах изоляторов пораженной опоры (рис. 3), поэтому количество, рассчитанное с учетом только одной опоры, будет завышенным. С другой стороны, за счет стекания тока в землю на соседних опорах и потерь при распространении волн перенапряжений за счет импульсной короны и конечного сопротивления проводов и грунта напряжение на гирляндах изоляторов опор, удаленных от места удара молнии, будет существенно ниже, чем в месте удара. Расчет в моделях с разным количеством опор показал, что глубину распространения грозового перенапряжения в ВЛ можно оценить участком в 4-6 опор. Увеличение количества опор в модели линии сверх шести дает уточнение конечного результата не более чем на 2%. Uг, кВ 1100 1000 900 800 700 600 500 400 300 200 0 0.5 1 1.5 2 2.5 3 3.5 4 t, мкс Р и с. 3. Напряжения на гирляндах изоляторов: с учетом соседних опор; без учета соседних опор Расчеты в моделях с различными схемами замещения опор ВЛ показали, что без особой погрешности для результата достаточно использовать схему замещения опоры, учитывающую индуктивности тела опоры между траверсами. Учет индуктивностей траверс и емкости тела опоры на землю не дает значительного (более 5%) уточнения результатов. Значение погонной индуктивности тела опоры Lпог зависит от типа опоры и лежит в пределах от 0,5 мкГн/м (металлическая опора с оттяжками) до 1,5 мкГн/м (портальная деревянная опора). Из графика (рис. 4, а) видно, что значение погонной индуктивности тела опоры начинает влиять на суммарное количество грозовых отключений, только если оно превышает 1,1 мкГн/м. Варьирование Lпог в меньших пределах не изменяет значения N OTK . 136 Р и с. 4. Влияние погонной индуктивности тела опоры и индуктивности между опорой и каналом молнии на количество грозовых отключений: a – увеличение числа отключений с увлечением индуктивности тела опоры; б – расхождение в расчетах при учете и без такого учета Напряжение на опоре, пораженной молнией, содержит, кроме падения напряжения на сопротивлении заземления и индуктивностях тела опоры, еще составляющую, вызванную индуктивной связью между каналом молнии и телом опоры. Коэффициент взаимной индукции вертикального участка тела опоры описывается выражением M OM M 'OM h . M 'OM принимается равным 0,2 мкГн/м. Вклад такого снижения напряжения в суммарное количество грозовых отключений ВЛ составляет 12% при низких значениях сопротивления опоры (рис. 4, б) и быстро падает при увеличении сопротивления заземления. По результатам работы можно сделать следующие выводы: – при использовании распределения амплитуд токов молнии и скоростей их нарастания, описанных законом Вейбулла, для построения КОТ можно ограничиться тремя точками с приемлемой точностью для оценки числа отключений; – коэффициент связи и потери в земле за счет проникновения электромагнитного поля в грунт существенно снижают годовое количество грозовых отключений линии; – импульсная корона приводит к увеличению времени нарастания напряжения и снижению его максимального значения на гирляндах изоляторов при импульсах молнии с короткими фронтами; – наибольшее количество отключений происходит при полярности рабочего напряжения нижней фазы на опоре, противоположной полярности молнии ( 0 30 ); – для расчета переходного процесса при ударе молнии в ВЛ достаточно использовать модель, состоящую из 6 опор; – схема замещения опоры ВЛ, учитывающая индуктивности тела опоры только между траверсами, дает достаточно точный результат; – варьирование значения погонной индуктивности тела опоры в пределах до 1,1 мкГн/м практически не влияет на годовое количество грозовых отключений; – учет взаимной индуктивности между телом опоры и каналом молнии изменяет конечное количество грозовых отключений линии в год ориентировочно на 12% при малых сопротивлениях заземления опоры и снижается до 2% при увеличении сопротивления заземления. 137 БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. Кадомская К.П., Костенко М.В., Левинштейн М.Л. Теория вероятности и ее приложения к задачам электроэнергетики. – СПб.: Наука, 1992. 2. Руководство по защите электрических сетей 6-1150 кВ от грозовых и внутренних перенапряжений / Под ред. Н.Н. Тиходеева. – 2-е изд. – СПб: ПЭИПК Минтопэнерго РФ, 1999. 3. Костенко М.В., Ефимов Б.В., Зархи И.М., Гумерова Н.И. Анализ надежности грозозащиты подстанций. – Л.: Наука, 1981. – 128 с. Статья поступила в редакцию 13 апреля 2011 г. UDC 621.316.91 ASSESSING THE IMPACT OF ASSUMPTIONS ON THE RESULTS OF THE SIMULATION OF TRANSIENTS IN LIGHTNING STRIKES IN THE TRANSMISSION LINE N.I. Gumerova1, F.Ch. Chalilov1, G.G. Hohlov1, I.A. Kosorlukov2 1 St. Petersburg State Polytechnical University 29, Polytechnicheskaya st., St. Petersburg, 195251 2 Samara State Technical University 244, Molodogvardeyskaya st., Samara, 443100 The article presents an assessment of the influence of various simplifications and assumptions in the physical model of transmission line in the modeling of the transition process of lightning strike in the calculation of the number of lightning outages. Key words: modeling, lightning, lightning proofness, number of lightning outages. 138 N.I. Gumerova – Doctor of Technical Sciences, Professor. F.Ch. Chalilov – Candidate of Technical Sciences, Associate professor. G.G. Hohlov – Postgraduate student. I.А. Kosorlukov – Postgraduate student. УДК 681.3.06 МЕТОД РАСЧЕТА МАГНИТНЫХ ПОЛЕЙ ПРОМЫШЛЕННОЙ ЧАСТОТЫ ОТ ТРЕХФАЗНЫХ ШИН С СИММЕТРИЧНЫМИ ТОКАМИ В.М. Салтыков, Н.В. Безменова Самарский государственный технический университет 443100, г. Самара, ул. Молодогвардейская, 244 Приведены аналитические выражения и графическая модель характера изменения суммарных напряженностей магнитного поля от трехфазных симметричных токов промышленной частоты в зависимости от расстояния между шинами и контрольными точками возможного расположения технических устройств. Ключевые слова: распределительные устройства, напряженность магнитного поля, трехфазные симметричные токи, шины. В электрических сетях и распределительных устройствах низкого напряжения 0,4…10 кВ напряженность электрического поля промышленной частоты E , кВ/м, имеет незначительные уровни [1], а рабочие токи могут достигать 4000 А, т. е. создавать значительные по уровням напряженности магнитного поля промышленной частоты [2-4]. Основными источниками напряженности магнитных полей промышленной частоты H , А/м в электрических сетях и распределительных устройствах являются трехфазные токи IA , IB , IC проводников, в частности, шины прямоугольного или круглого сечения, разнесенные в пространстве на определенное расстояние друг от друга, например, в ячейках комплектных распределительных устройств (КРУ). Техническое средство (ТС), например, устройства микропроцессорной релейной защиты (МПРЗ), чувствительное к магнитным полям, т. е. контрольная точка i , также находится на определенном расстоянии от шин с токами, причем создаваемые в контрольной точке напряженности магнитного поля H i , A , H i , B , H i , C от трехфазных токов электрической сети будут иметь разные значения, в первую очередь, из-за разных расстояний между шинами с током и контрольной точкой. При этом задача определения результирующей (суммарной) напряженности магнитного поля H i , , А/м в контрольной точке i зависит от комплекса электрических и конструктивных факторов. В общем виде определение результирующей напряженности магнитного поля H i , в контрольной точке i предполагает решение системы уравнений: H i , A H i, A ( IA ; Ri , A ) cos A,i , a ; (1) H i , B H i, B ( IB ; Ri , B ) cos B,i ,b ; (2) H i ,C H i,C ( IC ; Ri ,C ) cos C ,i , c ; (3) Валентин Михайлович Салтыков – д.т.н., профессор. Надежда Валерьевна Безменова – старший преподаватель. 139 H i , H i , A H i , B H i ,C , (4) где IA ; IB ; IC – токи в шинах A, B, C , А; Ri , A ; Ri , B ; Ri ,C – расстояние между центрами шин A, B, C и контрольной точкой i , м; H i, A ; H i, B ; H i, C – напряженности магнитного поля от тока шин A, B, C в контрольной точке i , А/м; cos A, i , a , cos B,i ,b , cos C , i , c – коэффициент приведения значений напряженностей магнитного поля H ; H ; H к значениям их проекций H ; H ; H на плосi, A i, B i,C i, A i, B i,C кость, параллельную расположению шин. В распределительных устройствах низкого напряжения шины прямоугольного сечения, как правило, расположены вертикально в ряд и могут быть направлены в сторону контрольных точек широкой h или узкой b стороной. На основании полученных выражений (1…4) можно выполнить расчет напряженностей магнитного поля в контрольных точках a, b, c напротив трехфазных шин прямоугольного сечения A, B, C при расположении прямоугольных шин широкой стороной h к контрольным точкам a, b, c , что отражено геометрической моделью (рис. 1). IB IA А IC B RA,a φC,b y i HB,a HC,a Ha,Σ φB,c φA,c φA,b b HA,b HB,b Hb,Σ х RC,c RB,b HA,a φC,a φB,a a C HB,c HC,b HC,c c HA,c Hc,Σ Р и с. 1. Геометрическая модель расположения шин A, B, C с токами IA , IB , IC , направленных к плоскости контрольных точек a, b, c широкой стороной h В представленной на рис. 1 геометрической модели расположения шин и контрольных точек a, b, c для расчета напряженностей магнитного поля H , А/м от симметричных токов ось расположения шин в горизонтальной плоскости примем за ось x . Изменения значений напряженности магнитного поля от центра шины A к контрольной точке a примем за ось y . Контрольные точки a, b, c, i будем располагать на плоскости x , параллельной плоскости расположения центров шин с симметричными токами. 140 При выполнении расчетов будем рассматривать напряженности магнитного по ля H , А/м, направленные по нормалям H h или H b к сторонам шин прямоугольного сечения ограниченной длины [5] и в произвольном направлении к плоскости оси y , определяемые по выражениям: – по оси координаты x : I 0,15 (ln L 3,11) , А/м; H I( h,i) 2 R1I ,,4i (5) I 0,12 (ln L 3,29) , А/м; H I(b,i) 2 R1I ,,4i (6) – по оси координаты y : – в плоскости y : H I(, ih) H I( h, i) H I(b,i) 2 2 , А/м, (7) H I( h,i) sin 2 I ,i H I(b, i) cos 2 I ,i где H I( h, i) – напряженность магнитного поля в воздушном пространстве по оси нор- I , А/м; H I(b, i) – напряженность магнитного поля в воздушном пространстве по оси нормали узкой стороны прямоугольной шины с током I , А/м; H I(, ih ) – напряженность магнитного поля в воздушном пространстве от центров шин к контрольным точкам, А/м; I – ток в шинах A, B, C прямоугольного сечения, A; L – длина прямоугольной шины с током ( L 1ì ), м; RI , i – расстояние от центра прямоугольной шины с током до мали широкой стороны h прямоугольной шины с током контрольной точки i , м. Расстояние RI( h, i) , м от центра прямоугольной шины с током I до контрольной точки i определяется углом (Ih, i) между вектором (расстоянием) Rx( h,i) , м, направленным вдоль оси нормали широкой стороны шины h с координатами x, i , т. е. по оси y , и вектором (расстоянием) R x , i , м, направленным по оси x , с координатами x, i , т. е. по выражению RI( h,i) Rx( h,i) / cos (Ih,i) , (8) где cos (Ih,i) Rx,i / Rx,i – косинус угла сдвига вектора (расстояния) Rx( h,i) по оси y в направлении контрольной точки i . Следует отметить, что значения напряженности магнитного поля H I(, ih ) , А/м, полученные по выражению (7) в контрольных точках i , например, a, b, c , будут находиться в плоскости, перпендикулярной направлению векторов (расстояний) Ri . 141 Для приведения указанных значений H I(, ih ) к общей плоскости, в частности, по оси x , для их последующего сложения по выражению (4) необходимо воспользоваться следующим выражением: H I( h,i) H I( h, i) cos (Ih, i) . (9) На основании представленных выражений в трехфазных электрических сетях и в распределительных устройствах с симметричными токами была разработана методика расчета значений напряженностей магнитного поля как от отдельных шин с током H ( h ) , H ( h ) , H ( h ) , так и результирующих (суммарных) значений H в окруA, i B,i ,i C ,i жающем пространстве (в контрольных точках). С использованием выражений (4…9) были определены мгновенные значения напряженностей магнитного поля от трехфазных симметричных токов (шины А: H ( h ) ; шины B: H ( h ) ; шины С: H ( h ) ) в контрольной точке a и других, а также их A, a B, a C,a результирующих значений H (h) , в плоскости широких сторон h прямоугольных шин, которые на интервале периода промышленной частоты (0,02 с.) показаны на рис. 2…4. Р и с. 2. Мгновенные значения напряженностей магнитного поля в контрольной точке a в плоскости широких сторон h прямоугольных шин при R A, a = 0,6 м На основании рассмотренных выражений был выполнен расчет значений суммарных напряженностей магнитного поля H ( h, a) ; H ( h,b) ; H ( h, c) , А/м на расстоянии R x , i , м для ряда контрольных точек по оси y [6] от симметричных трехфазных токов A, B, C прямоугольных шин в плоскости их широких сторон h . В частности, для расстояния между шинами d 0,2 м, определяемого условиями электродинамической устойчивости шин, результаты расчетов суммарных напряженностей магнитного поля H (h) ( H ( h, a) , H ( h,b) , H ( h, c) ) в контрольных точках напротив шин с трехфазными токами I , I , I сведены в табл. 1. A 142 B C Р и с. 3. Мгновенные значения напряженностей магнитного поля в контрольной точке b в плоскости широких сторон h прямоугольных шин при RB , b = 0,6 м Hh,c,∑ 300 214,672 Hh,c,C Hh,c,B 200 Hh,c,A Hh,c,∑ 100 0 100 214,672 200 300 0 10 20 n 0 30 24 Р и с. 4. Мгновенные значения напряженностей магнитного поля в контрольной точке c в плоскости широких сторон h прямоугольных шин при RC , c = 0,6 м Из рис. 2…4 и табл. 1 следует, что наибольшие значения H (h) присутствуют в контрольной точке a : H ( h, a) и в точке c : H ( h,b) , пространства напротив крайних шин с токами I и I . Это объясняется комбинацией фазовых сдвигов между напряженA C ностями от токов отдельных фаз и их значениями в контрольной точке в зависимости от расстояния. При этом характер изменения суммарных значений напряженностей магнитного поля напротив шины A – H ( h) в контрольных точках на расстоянии R , м от ши, a A, a ны A для ряда значений симметричных токов I A IÂ IÑ = 1000; 2000; 3000 А (при d 0,2 м) в графическом виде показан на рис. 5. 143 Таблица1 ( h) (h) ( h) Значения суммарных напряженностей магнитного поля H (h) ( H , a , H , b , H , c ) в контрольных точках i для симметричных токов А, В, С в прямоугольных шинах H (h) для IA IB IC 1000 A , d 0,2 м Ось x , м 0 Rx,i , м H ( h, a) 0,1 0,2 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1 1720 546,7 256 140 82,6 52,2 34,5 23,7 16,8 12,2 0,05 0,1 0,15 0,2 0,25 0,3 0,35 H ( h,b) 1171 462 224 122 71 44 27 19 14 10 640 368 187 99,5 56,6 34,3 21,9 14,6 10,2 7,3 1117 385 163 79 42 25 16 10 7 5 1629 426 157 70,5 36,3 20,6 12,6 8,2 4,6 3,9 0,4 H ( h, c) 1117 385 163 79 42 25 16 10 7 5 640 368 187 99,5 56,6 34,3 21,9 14,6 10,2 7,3 1171 462 224 122 71 44 27 19 14 10 1720 546,7 256 140 82,6 52,2 34,5 23,7 16,8 12,2 ( h) Рис. 5. Изменения значений суммарных напряженностей магнитного поля H , a в кон- трольных точках на расстоянии R A, a , м от шины A при токах I A I В I С = 1000; 2000; 3000 А Аппроксимирующие выражения кривых значений H ( h, a) (при d 0,2 м), показанных на рис. 5, имеют вид: – для IA IB IC =1000 А: 144 H ( h, a) 14,1 / R A2,,38 a , А/м, (10) – для IA IB IC =2000 А: H ( h, a) 28,4 / R A2,,37 a , А/м, (11) – для IA IB IC =3000 А: H ( h, a) 42,4 / R A2,,38 a , А/м. (12) Полученные аппроксимирующие выражения для группы токов позволяют получить общее выражение суммарных значений напряженностей магнитного поля от симметричных токов для наибольших значений (напротив крайних шин) системы трехфазных шин для случая расположения трехфазных шин прямоугольного сечения широкой стороной h – H ( h, a) к контрольным точкам пространства: 0,014 I , А/м, H ( h, a) ( I ) R A2,,38 a (13) где I – ток шины прямоугольного сечения, А; R A, a – расстояние от контрольной точки a напротив крайней шины до центра прямоугольной шины A по нормали ее широкой стороны h . Аналогичные расчеты суммарных значений напряженностей магнитного поля были выполнены и для случая расположения трехфазных шин прямоугольного сечения узкой стороной b – H (b, a) к контрольным точкам пространства (при d 0,2 м) для наибольших значений (напротив крайних шин) системы трехфазных шин. Для их определения можно использовать выражение 0,009 I , А/м, H (b, a) ( I ) RA2,,45 a (14) где R A, a – расстояние от контрольной точки a напротив крайней шины до центра прямоугольной шины A по нормали ее узкой стороны b . Для системы трехфазных шин круглого сечения D напряженность магнитного поля H ( D ) для наибольших значений (напротив крайних шин) можно определить по , a выражению (при d 0,2 м) 0,011 I , А/м, H ( D, a) ( I ) RA2,,44 a (15) где R A, a – расстояние от контрольной точки a напротив крайней шины до центра круглой шины A сечением D . В результате расчетов было получено, что наибольшие значения суммарных напряженностей магнитного поля промышленной частоты в контрольных точках пространства на одинаковом расстоянии от трехфазных шин с симметричными токами присутствуют при направлении к контрольным точкам шин прямоугольного сечения широкой стороной h – H ( h) ( I ) , наименьшие – при направлении к кон, a трольным точкам шин прямоугольного сечения узкой стороной b – H (b, a) ( I ) , при этом расхождения между суммарными значениями напряженности магнитного поля 145 составляют 35%. Промежуточные значения суммарных значений напряженности магнитного поля создают трехфазные шины круглого сечения D – H ( D ) ( I ) . , a БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. 2. 3. 4. 5. 6. Защита биосферы от влияния электромагнитных полей: Учеб. пособие для вузов / Е.С. Колечицкий, В.А. Романов, В.Г. Карташов. – М.: Издательский дом МЭИ, 2008. Салтыков В.М., Самолина О.В., Павлов А.В. Электромагнитные поля трансформаторных подстанций промышленных предприятий с позиции электромагнитной безопасности // Проблемы электротехники, электроэнергетики и электротехнологии. Тр. Всерос. науч.-техн. конф. Ч. 1. – Тольятти: ТГУ, 2004. – С. 163-170. Салтыков В.М., Сайдова Н.В. Анализ электромагнитных полей главной понизительной подстанции 110/35/6 кВ // Экология и ресурсо- и энергосберегающие технологии на предприятиях народного хозяйства (промышленность, транспорт, сельское хозяйство). Сб. ст. VI Всерос. науч.-практ. конф. – Пенза: Приволжский дом знаний, 2006. – С. 23-26. Салтыков В.М., Сайдова Н.В., Булохов Д.В., Муштаков А.И. Исследование электромагнитных полей промышленной частоты характерных объектов электростанций и способы их защиты // Перенапряжения и надежность эксплуатации электрооборудования. Тр. Междунар. науч.-техн. конференций. – СПб.: ПЭИПК, 2008. – С. 164-166. Салтыков В.М., Безменова Н.В. Учет длины проводника с током промышленной частоты при определении напряженности магнитного поля // Энергосбережение, электромагнитная совместимость и качество в электрических системах. II Международная науч.-практ. конференция. 20 февраля 2011. – Пенза: Приволжский дом знаний, 2011. – С. 3-5. Салтыков В.М., Безменова Н.В. Оценка допустимых расстояний в распределительных устройствах напряжением 6-10 кВ при обеспечении нормируемых уровней магнитных полей промышленной частоты 50 Гц // Технологии электромагнитной совместимости. – 2011. – № 1. – С. 14-18. Статья поступила в редакцию 28 февраля 2011 г. UDK 681.3.06 THREE-PHASE SUPPLIED INDUSTRIAL FREQUENCY MAGNETIC FIELDS CALCULATION METHOD V.M. Saltykov, N.V. Bezmenova Samara State Technical University 244, Molodogvardeyskaya str., Samara, 443100 The work shows analytical forms and graphic model of ouerall three-phase symmetric current magnetic field strength change depending on distance between bus rods and control point of possible devices locations. Keywords: switchboard, magentic field, three-phase balanced currents, busbars. 146 V.M. Saltykov – Doctor of Technical Sciences, Professor. N.V. Bezmenova – Senior Lecture. УДК 681.5+519.217 МОДЕЛИРОВАНИЕ АВТОМАТИЗИРОВАННОЙ СТАНОЧНОЙ СИСТЕМЫ Е.А. Чеканина Московский государственный технологический университет «Станкин» 127994, г. Москва, Вадковский пер., 3А E-mail: eugene-ch@mail.ru Рассматривается способ моделирования технологического процесса с помощью марковской цепи, позволяющий определить основные технические характеристики производственной системы. Этот метод позволит представить технологический процесс в виде системы с причинно-следственными связями между ее составными элементами и установить степень их влияния на конечный результат работы производственной системы. Ключевые слова: машиностроение, автоматизация, производственная система, технологический процесс, моделирование, марковская цепь, состояние, граф, переходная вероятность. Моделирование автоматизированной станочной системы целесообразно проводить на основе теории случайных процессов. Класс марковских процессов является простейшим и наиболее исследованным [1]. При разработке крупных автоматизированных комплексов возникают проблемы, в меньшей степени связанные с рассмотрением свойств и законов функционирования и в большей – с выбором наилучшей структуры, оптимальной организации взаимодействия элементов, определением требуемых режимов функционирования системы. Описание метода моделирования автоматизированной станочной системы. Рассматривая производство как систему, необходимо выявить причинноследственные связи основных ее подсистем и установить их влияние на конечный результат деятельности системы. Исследуя производственную систему как объект, необходимо выделить ряд формальных признаков и свойств, которые характеризуют производство с системных позиций. Рассмотрим некоторую производственную систему (рис. 1) обработки (сборки) технологического объекта (ТО). Необходимо построить математическую модель этой системы и определить ее основные технические характеристики. Р и с . 1. Производственная система обработки В состав системы входят: загрузочный бункер (ЗБ), размещающий ТО для последующей транспортировки с помощью транспортного робота; транспортный робот Евгения Александровна Чеканина – аспирант. 147 (ТР), обеспечивающий перемещение ТО от ЗБ к буферному накопителю; буферный накопитель (БН); станок, принимающий ТО для обработки с БН. Опишем процесс работы приведенной производственной системы. Под тактом операции будем понимать время, в течение которого выпускается предмет труда или осуществляется процесс операции. Объекты обработки, находящиеся на ЗБ, готовы в любой момент времени к перемещению с помощью ТР. Если транспортный робот свободен, то захватывает очередной ТО из бункера и через период, длящийся два такта, передает его в БН при наличии в нем свободных мест, после чего принимает новый объект. Если накопитель полностью заполнен, то транспортный робот блокируется по входу. При этом робот удерживает ТО до тех пор, пока не освободится место в БН, после чего ТР разблокируется, освобождаясь от объекта, и может захватывать новый ТО из загрузочного бункера. Бункерный накопитель имеет ограниченную емкость, достаточную для хранения n технологических объектов. Объект, поступающий на станок, проходит обработку, которая проводится в течение одного такта. В процессе обработки с вероятностью p 0 возможен сбой в работе станка. Наличие сбоя выявляется контрольной аппаратурой, при этом обработка технологического объекта повторяется до получения требуемого изделия. Будем полагать, что контрольная аппаратура работает безотказно. Рассмотрим возможные состояния системы, которые определяются состояниями ее элементов: транспортного робота, буферного накопителя и станка. Состояние БН определяется числом i объектов, находящихся в нем. Возможное число состояний транспортного робота равно трем. Первое состояние будем определять в случае его блокировки, т. е. невозможности перемещать объекты. Это состояние определяется как j 0 . Если ТР взял объект из бункера, то его передача осуществляется в течение двух тактов, поэтому целесообразно выделить две фазы перемещения ТО. Первая фаза характеризуется тем, что транспортный робот взял объект и может переместить его в БН только через два такта. Условно это состояние определим как j 1 . Состояние, соответствующее второй фазе перемещения ТО, будем определять как j 2 . Если робот находится в состоянии j 2 , то через один такт он перемещает объект в накопитель. Технологическое устройство станка может принимать два возможных состояния: k 0 (станок свободен) и k 1 (станок обрабатывает объект). Таким образом, состояние рассматриваемой системы будем описывать трехмерным вектором i, j , k , где i 0, n , j 0,2 , k 0,1 . Построим граф функционирования системы и определим переходные вероятности. Начнем построение графа с состояния n, 0, 1 , когда станок находится в состоянии работы, накопитель переполнен, отсюда транспортный робот заблокирован. Предположим, что в работе станка произойдет сбой с вероятностью p 0 . При этом обработка ТО на станке повторяется, а состояние системы не меняется. С вероятностью 1 p 0 через один такт станок закончит обработку объекта и мгновенно примет новый ТО из накопителя, поэтому состояние станка k 1 остается тем же. На освободившееся место в накопителе с помощью транспортного робота поступает новый ТО, при этом число объектов в накопителе сохраняется равным n . При этом робот разблокируется по входу и возьмет новый объект из бункера, переходя в состояние первой фазы передачи. ТР может его переправить в БН при наличии в нем свободных мест только через два такта. Состояние робота изменилось и приняло значение 148 j 1 . Таким образом, с вероятностью 1 p 0 произошел переход системы из состояния n, 0, 1 в состояние n, 1, 1 . Рассмотрим возможные переходы из состояния n, 1, 1 . С вероятностью p 0 через один такт при обработке объекта на станке произойдет сбой, при этом обработка повторяется и состояние станка вновь сохраняется. Остается неизменным и состояние накопителя, поскольку станок не может принять новый ТО. Состояние же транспортного робота меняется и становится равным j 2 , так как меняется фаза прохождения ТО. В результате с вероятностью p 0 осуществляется переход из состояния n, 1, 1 в состояние n, 2, 1 . С вероятностью 1 p 0 станок через один такт закончит обработку ТО и примет следующий объект из накопителя. При этом станок вновь окажется в состоянии работы k 1 , но в БН останется n 1 ТО. Транспортный робот перейдет в состояние k 2 . Таким образом, с вероятностью 1 p 0 произошел переход системы из состояния n, 1, 1 в состояние n 1, 2, 1 . Аналогично определяются остальные переходные вероятности. Размеченный граф [2] рассматриваемой производственной системы обработки показан на рис. 2. Р и с . 2. Размеченный граф производственной системы обработки Для определения стационарных вероятностей нахождения системы в каждом состоянии составим систему уравнений: p n, 0, 1 p0 p n,0,1 p0 p n, 2, 1 , p n, 1, 1 1 p0 p n,0,1 1 p0 p n, 2, 1 p0 p n1, 2, 1 , p n, 2, 1 p0 p n,1,1 , .................................................................................................................................... pi, 1, 1 1 p0 pi,2,1 p0 pi 1, 2, 1 , pi, 2, 1 1 p0 pi 1,1,1 p0 pi, 1, 1 , i 1, n 1 , .................................................................................................................................... p0, 1, 1 1 p0 p0,2,1 p0, 2, 0 , p0, 2, 1 1 p0 p1,1,1 p0 p0, 1, 1 , p0, 2, 0 1 p0 p0,1,1 , n 2 1 pijk 1 . i 1 j 0 k 0 149 Введем следующие обозначения: p0 , 1 p0 тогда после подстановки принятых обозначений в систему уравнений находим: K2 K3 1 K p , p1, 2, 1 p, p0, 1, 0 p , p 0, 2, 1 p , p1, 1, 1 1 p0 1 p0 1 p0 1 p0 ............................................................................................................................ K 2i K 2i 1 p i , 1, 1 p , p i , 2, 1 p, 1 p0 1 p0 ............................................................................................................................ K 2 n 1 K 2n K 2n 2 p n, 1, 1 p , p n , 2, 1 p , p n , 0, 1 p. 1 p0 1 p0 1 p0 Предположим, что сбои в системе отсутствуют, время обработки объекта дискретно, с вероятностью p 0 принимает значения, равные одному такту, и с вероятностью 1 p 0 – значение, равное трем тактам. В этом случае станок может принимать четыре возможных состояния: k 0 , если станок простаивает; k 1 , если станок отработал один такт времени; k 2 , если станок проработал два такта времени; k 3 , если станок заканчивает работу. Система линейных алгебраических уравнений для определения стационарных вероятностей нахождения системы в каждом состоянии имеет следующий вид: p0, 2, 0 p0 p0,1,1 ; p0, 1, 1 p0 p0, 2, 1 p0, 2, 0 ; p p0, 1, 0 и K p0, 2, 1 p0 p1, 1, 1 p1, 1, 3 ; p0, 2, 2 1 p0 p0,1,1 ; .............................................................................. pi , 1, 1 p0 pi, 2,1 pi , 2, 3 , pi, 2, 1 p0 pi 1,1,1 pi 1, 1, 2 i 1, n 1 ; pi, 1, 2 1 p0 pi 1,2,1 , pi, 1, 3 pi 1,2,2 , pi, 2, 2 1 p0 pi,1,1 i 1, n ; .............................................................................. pn, 1, 1 pn,2,3 pn, 0, 3 ; n 2 1 pijk 1 . i 1 j 0 k 0 Теперь рассмотрим эту задачу в другой постановке. Пусть время перемещения объекта с помощью робота представляет собой непрерывную случайную величину, распределенную по показательному закону с параметром 1 . Время обработки ТО на станке также непрерывно и подчиняется показательному закону с параметром 2 . Требуется построить расчетную математическую модель системы. Система может принимать n 3 возможных состояний: z 1 – в накопителе нет ТО, при этом робот простаивает, станок находится в режиме работы; z 0 – в накопителе нет ТО, при этом транспортный робот и станок находятся в режиме работы; z i – в накопителе имеется i ТО, при этом транспортный робот и станок находятся в состоянии работы; z n – накопитель переполнен, транспортный робот и станок работают; z n 1 – накопитель занят, станок работает, ТР заблокирован. Если принять 150 1 , то предельные вероятности состояний системы будут описываться следу2 ющими выражениями: 1 p ; pi pi 1 p1 , i 0, n 1 . p 1 1 p n 3 Значения предельных вероятностей позволяют определить основные характеристики системы. Например, средняя доля времени, в течение которого транспортный робот находится в состоянии простоя, равна вероятности того, что ТР заблокирован, и определяется выражением 1 p p n1 p n 2 . n 3 1 p p Заключение. Таким образом, возможно представление технологического процесса в виде марковской цепи для определения основных технических характеристик производственной системы. БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. 2. Соломенцев Ю.М. Проблема создания компьютеризированных интегрированных производств // Автоматизация проектирования. – №1. – 1997. – С. 10-14. Зыков А.А. Основы теории графов. – М.: Наука, 1987. – 384 с. Статья поступила в редакцию 11 марта 2011 г. UDC 681.5+519.217 SIMULATION OF AUTOMATED MACHINING SYSTEMS E.A. Chekanina Moscow State Technical University «Stankin» 3A, Vadkovsky lane, Moscow, 127994 The paper considers a method of modeling the technological process using a Markov chain, technical characteristics of production systems. This method would allow submit the technological process in the form of a causal link between its constituent elements and establish the extent of their influence on the final result of the production system. Keywords: mechanical engineering, automation, industrial system, technological process, modeling, a Markov chain, a condition, a graph, transitive probability. E.A. Chekanina – Postgraduate student. 151 УДК 621.825 + 62-83 ЗАВИСИМОСТИ МОМЕНТА, ЧАСТОТЫ ВРАЩЕНИЯ И КПД ИНДУКЦИОННОЙ ЯВНОПОЛЮСНОЙ МУФТЫ СКОЛЬЖЕНИЯ С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ ОТ АКТИВНОЙ ДЛИНЫ ЯКОРЯ Д.В. Харитонов Самарский государственный технический университет, филиал в г. Сызрань 446001, г. Сызрань, Самарская область, ул. Советская, д. 45 Получены зависимости момента на ведомом валу, а также частоты вращения и КПД индукционной явнополюсной муфты скольжения с тремя степенями свободы от активной длины якоря для нагрузок различных видов при одинаковой номинальной частоте вращения. Ключевые слова: индукционная муфта, муфта скольжения, степени свободы, регулирование муфты, активная длина якоря, вариатор частоты, вариатор момента, механические характеристики, КПД муфты. В статье [1] рассмотрена работа индукционной явнополюсной муфты скольжения с тремя степенями свободы [2] как вариатора частоты. Данная муфта регулируется изменением активной длины якоря посредством перемещения якоря относительно индуктора вдоль ведомого вала. Однако работа ее как вариатора момента рассмотрена неполно, т. к. момент муфты зависит не только от активной длины якоря, но и от скольжения (см. формулу (1)). Скольжение же при изменении активной длины изменяется, причем по-разному для различных нагрузок (рис. 1). В данной работе рассматривается работа такой муфты как вариатора момента для нагрузок различных видов. а 152 Дмитрий Вячеславович Харитонов – преподаватель. б в Р и с . 1. Механические характеристики индукционной явнополюсной муфты скольжения с тремя степенями свободы и нагрузки: а – для нагрузки с линейно возрастающим моментом (q=1) при Mc=100 Нм, Mн=515,5 Нм; б – для нагрузки с постоянным моментом (q=0) при Mc=Mн=515,5 Нм; в – для нагрузки, задаваемой квадратичной функцией (q=2), при Mc=100 Нм, Mн=515,5 Нм. Общие параметры: n0=3000 мин–1; nн=2500 мин–1; D=0,32 м; =0,1610–6 Омм; Bm0=0,623 Тл; ая=0,45810–3 Гн/м; z=16 153 Уравнение вращающего момента индукционной муфты [3, с. 56]: M 2 Bm2 0 D 3l n0 s , 680 D 4 D z 3 1 z àÿ n0 s 10 zlz D 12 z 2 (1) или M 2 Bm2 0 D 3l (n0 n) , 680 D 4 D z 3 1 z àÿ (n0 n) 10 zlz D 12 z 2 (1*) где Bm0 – амплитуда первой гармоники переменной составляющей индукции магнитного поля в зазоре при s=0, т. е. без учета влияния реакции якоря на Bm; D – активный диаметр якоря; l – активная длина якоря, для явнополюсной муфты активная длина якоря равна длине зубцов (полюсов) l=lz; n0 – частота вращения (об/мин) ведущей части муфты; s=(n0–n)/n0 – скольжение муфты, n – частота вращения (об/мин) ведомой части муфты, n0–n=n0s – относительная частота вращения ведущего и ведомого валов; z – количество зубцов (полюсов); lz – длина зубцов (полюсов) индуктора; – удельное электрическое сопротивление материала якоря; àÿ – абсолютная магнитная проницаемость материала якоря на его поверхности при s=0. Уравнение нагрузки в общем виде может быть описано зависимостью [3, с. 101] q n (2) M M c ( M í M c ) , ní где M – текущее значение момента нагрузки; Mc – постоянная составляющая момента нагрузки; Mн – момент нагрузки при номинальной частоте вращения; n – текущее значение частоты вращения; nн – номинальная частота вращения нагрузки; q – показатель степени, зависящий от вида нагрузки. Уравнение (2) является приближением реальных нагрузочных характеристик и не учитывает переходные процессы при пуске привода. Механические характеристики муфты и нагрузки. На рис. 1 показаны механические характеристики индукционной явнополюсной муфты скольжения с тремя степенями свободы, построенные по (1*) при разной активной длине l якоря, и механические характеристики различных видов нагрузки, построенные по уравнению (2) при q=0, 1, 2 (т. е. в приближении, задаваемом уравнением (2)). Подобные механические характеристики обычной индукционной муфты скольжения при различных токах возбуждения и механические характеристики нагрузок приводятся в [3, с. 102, рис. 6.1]. Зависимости частоты вращения и КПД муфты от активной длины якоря. Зависимость n(l) частоты вращения ведомого вала индукционной явнополюсной муфты с тремя степенями свободы от активной длины якоря была построена в [1, рис. 4]. Так как КПД любой индукционной муфты без учета добавочных потерь n определяется по формуле , то зависимость (l) КПД муфты от активной длиn0 ны якоря является зависимостью частоты вращения от активной длины (рис. 2), уменьшенной в n0 раз (рис. 3). 154 Р и с . 2. Зависимость n(l) частоты вращения ведомого вала индукционной муфты с тремя степенями свободы от активной длины якоря: 1 – для нагрузки с линейно возрастающим моментом при Mc=100 Нм, Mн=515,5 Нм; 2 – для нагрузки с постоянным моментом при Mc=Mн=515,5 Нм; 3 – для нагрузки, задаваемой квадратичной функцией, при Mc=100 Нм, Mн=515,5 Нм. Общие параметры: n0=3000 мин–1; nн=2500 мин–1; D=0,32 м; =0,1610–6 Омм; Bm0=0,623 Тл; ая=0,45810–3 Гн/м; z=16 Р и с . 3. Зависимость (l) КПД индукционной муфты с тремя степенями свободы от активной длины якоря (все обозначения и параметры муфты и нагрузки – как на рис. 2) 155 Для сравнения КПД муфты при разных нагрузках нужно иметь для всех трех рассматриваемых случаев нагрузки одинаковую номинальную частоту вращения, иначе невозможно сравнивать. Поэтому построенный в статье [1] график n(l) для нагрузки с постоянным моментом перестроен для nн=2500 об/мин, или, соответственно, для MC=Mн=515,5 Нм (см. рис. 2, кривая 2). Из этого графика видно, что для кривой 2 рост частоты вращения ведомого вала муфты от нуля начинается при большей активной длине якоря по сравнению с другими видами нагрузки. Это объясняется тем, что механические характеристики муфты начинают пересекать механическую характеристику нагрузки при более высоком своем расположении (при больших моментах), которому и соответствует большая активная длина якоря (см. рис. 1). Зависимость момента муфты от активной длины якоря при различных видах нагрузки. Чтобы получить зависимость M (l ) момента муфты от активной длины якоря при различных видах нагрузки, нужно подставить найденные в [1] зависимости n(l ) в уравнение нагрузки (2) при разных q (с учетом равенства моментов на муфте и нагрузке). Скольжение при этом будет изменяться (см. рис. 1). 1. Для нагрузки с линейно возрастающим моментом (q=1) уравнение (2) запишется в виде n (3) M M c (M í M c ) , ní а зависимость n(l ) имеет вид (см. [1]) n k2 k1k3n0 k1k4 k3M c (k2 k1k3n0 k1k4 k3M c ) 2 4k1k3 (k2 n0 k3M c n0 k4 M c ) 2k1k3 . (4) «Коэффициенты» в (4) находятся по формулам D z 2 2 3 M Mc D z 1 ; k2 aÿ 1 ; k4 4 .(5) k1 í Bm0 D l ; k3 12000 z 2 zl ní 680 D l На рис. 4 (кривая 1) приводится график зависимости M(l) момента на ведомом валу муфты от активной длины якоря для нагрузки с линейно возрастающим моментом, построенный по (3) и (4) с «коэффициентами» (5). Этот график можно также построить по точкам, получающимся при пересечении механических характеристик муфты и нагрузки (см. рис. 1, а): видно, что при увеличении активной длины (через 0,08 м) момент растет не прямо пропорционально, а медленнее. От l=0 до l=0,044 м момент муфты меньше постоянной составляющей Mc момента нагрузки, поэтому скорость ведомого вала равна нулю (см. рис. 2, кривая 1). В этом интервале оба момента равны моменту на муфте, определяемому формулой (1*) при n=0 (этот график показан точками на рис. 4). 2. Для постоянной нагрузки (q=0) уравнение (2) запишется в виде M Mí , (6) или M Mñ. (7) Тогда если n0, то при любой активной длине момент на муфте будет постоянным M (l ) M í M ñ const (рис. 1, б; рис. 4, кривая 2), но частота вращения будет изменяться по формуле (см. [1]) 156 M í k3n0 M í k4 k2n0 (8) M í k3 k2 с «коэффициентами» (5) (рис. 2, кривая 2). На рис. 4 точками (ромбиками) показана зависимость M(l) момента муфты по (1*) при n=0 (до начала вращения ведомого вала). Использование уравнения (2) не позволяет рассматривать переходные процессы при пуске привода с постоянной нагрузкой. 3. Для нагрузки, задаваемой квадратичной функцией (q=2), уравнение (2) запишется в виде n 2 n (9) M M c ( M í M c ) . ní При этом виде нагрузки формула для определения частоты вращения является решением кубического уравнения (см. [1]) an3 bn2 cn d 0 , (10) где обозначено kk k (11) a 1 3 ; b k4 k3n0 1 ; c M c k3 k2 ; d k2 n0 M c k3n0 M c k4 . ní ní Два корня уравнения (10) являются посторонними. Третье решение (громоздкое выражение) при подстановке в (9) с учетом (11) и (5) дает график (рис. 4, кривая 3). Р и с . 4. Зависимость M(l) момента индукционной муфты с тремя степенями свободы от активной длины якоря: 1 – для нагрузки с линейно возрастающим моментом при Mc=100 Нм, Mн=515,5 Нм; 2 – для нагрузки с постоянным моментом при Mc=Mн=515,5 Нм; точками показана зависимость M(l) момента муфты по (1*) при n=0 (до начала вращения ведомого вала); 3 – для нагрузки, задаваемой квадратичной функцией при Mc=100 Нм, Mн=515,5 Нм. Общие параметры: n0=3000 мин–1; nн=2500 мин–1; D=0,32 м; =0,1610–6 Омм; Bm0=0,623 Тл; ая=0,45810–3 Гн/м; z=16 157 В данном случае про интервал от l=0 до l=0,044 м можно сказать все то же, что и для нагрузки с линейно возрастающим моментом. Область применения. Рациональной областью применения обычных индукционных муфт скольжения являются механизмы с моментом нагрузки, пропорциональным квадрату скорости вращения [4, с. 203]. При такой нагрузке приводы с муфтами скольжения часто оказываются более экономичными в сравнении с другими системами регулируемого привода [3, с. 7]. Из анализа рис. 2, 3, 4 можно сделать следующие выводы. Как вариатор частоты индукционная явнополюсная муфта скольжения с тремя степенями свободы лучше всего подходит для нагрузки с линейно возрастающим моментом и хуже всего – для нагрузки с постоянным моментом (см. рис. 2). Как вариатор момента такая муфта почти одинаково подходит как для нагрузки, задаваемой квадратичной функцией, так и для нагрузки с линейно возрастающим моментом, а для нагрузки с постоянным моментом регулирования момента не требуется (см. рис. 4). С точки зрения КПД такую муфту, так же как и обычную индукционную, наиболее рационально использовать для нагрузки, задаваемой квадратичной функцией, а наиболее неэкономично ее использование при нагрузке с постоянным моментом (см. рис. 3). Таким образом, область применения индукционной муфты с тремя степенями свободы – вариатор момента и частоты для нагрузки, задаваемой квадратичной функцией, и для нагрузки с линейно возрастающим моментом. В заключение заметим, что требуется экспериментальная проверка полученных в работе результатов, а также исследование картины магнитного поля в индукционной муфте с тремя степенями свободы. Картина магнитного поля в обычной индукционной явнополюсной муфте хорошо известна (см. рисунки аналога и прототипа в [2]). Однако при выдвижении якоря из индуктора и, тем самым, уменьшении активной длины якоря от ее максимального (т. е. соответствующего обычной индукционной муфте) значения возможны искажения магнитного поля в плоскостях, проходящих через ось вращения. Эти искажения могут сказаться на исследованных в работе зависимостях. Кроме того, наличие на торце якоря кольца из немагнитного материала также может локально искажать картину магнитного поля. Поэтому не исключено, что конструкция муфты потребует доработки. Представляет интерес исследование распределения плотности тока в кольце из немагнитного материала и в якоре с таким кольцом с учетом поверхностного эффекта, а также вычисление тепловой мощности токов, текущих в немагнитном кольце. БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. 2. 3. 4. Харитонов Д.В. Анализ работы индукционной явнополюсной муфты скольжения с тремя степенями свободы // Вестник СамГТУ. Сер. Технические науки. – 2010. – № 2 (26). – С. 162-170. Патент на ПМ № 94779, МПК H02K 49/00. Индукционная явнополюсная муфта скольжения с тремя степенями свободы (варианты) / Д.В. Харитонов (RU). – Заявка 2009132325/22, 26.08.2009; опубл. 27.05.2010, Бюл. № 15. Щетинин Т.А. Электромагнитные муфты скольжения. – М.: Энергоатомиздат, 1985. – 272 с. Поляков В.С., Барбаш И.Д., Ряховский О.А. Справочник по муфтам / Под ред. В.С. Полякова. 2-е изд., испр. и доп. – Л.: Машиностроение, Ленингр. отд-е, 1979. – 344 с. Статья поступила в редакцию 7 сентября 2011 г. 158 UDC 621.825 + 62-83 DEPENDENCES OF THE TORQUE, FREQUENCY OF ROTATION AND EFFICIENCY OF INDUCTION CLUTCH WITH THREE DEGREES OF FREEDOM FROM ACTIVE LENGTH OF AN ARMATURE D.V. Haritonov Samara State Technical University, branch to Syzran 45, Soviet st., Syzran, 446001 The paper refers to dependences of the torque on main shaft, and also frequencies of rotation and efficiency of induction clutch with three degrees of freedom from active length of an armature for loadings of various kinds are received at equal nominal frequency of rotation. Keywords: an induction clutch, degrees of freedom, regulation of clutch, active length of an armature, a variator of frequency, a variator of the torque, speed-torque characteristics, efficiency of clutch. D.V. Haritonov – Senior Lecture. 159