Нахождение метода эквидистантного видоизменения
advertisement

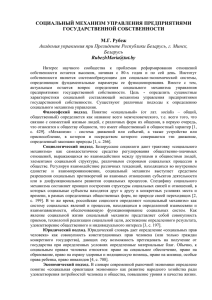
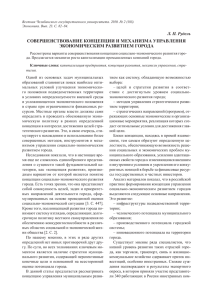
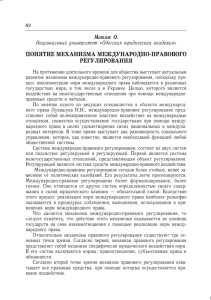
Министерство Образования Российской Федерации Иркутский Государственный Технический Университет Кафедра КСМ Отчёт о исследовательской работе «Нахождение метода эквидистантного видоизменения траекторий точек произвольно взятого механизма» 4.001.00.01 Руководитель И.Р.: доцент Иркутск 2001г. П.В.Королёв Список исполнителей Руководитель Работы: Студент группы ЭЛ-00-1 А.Е.Милов (экспериментальная часть; разделы 1,2; заключение; рисунки 1.6, 1.9, 1.14,2.4,2.13, 2.14,2.15) ответственные исполнители: студент группы ЭЛ-00-1 И.М. Рязанов (печать; введение, апробация) студент группы ЭЛ-00-1 А.В.Кулагин (введение; рисунки 1.1-1.5, 1.7,1-8, 1.10-1.13,2.1-2.3) студент группы ЭЛ-00-1 Е.О. Пискунов (набор текста; печать) студент группы СМ-00-1 И.В. Колмогорцев (рисунки 2.5-2.12; демонстрационная программа) Реферат Отчёт 63 страницы, 30 рисунков,4 источника,2 приложения Эквидистантное видоизменение, траектории точек, произвольно взятый механизм. Объектом исследования является плоский шарнирнорычажный приближённо-направляющий механизм П.Л.Чебышева. Цель работы - выявить возможности и способы эквидистантного изменения вида шатунной кривой механизма. Во введении кратко изложена история проблемы получения эквидистант в области самолётостроения. В ходе работы проводились экспериментальные исследования: 1. Влияние изменения размеров звеньев на вид шатунной кривой исходного механизма. 2. Влияние изменения закона движения второго кривошипа «составного» механизма на вид шатунной кривой. В результате исследований были выявлены два способа описания эквидистантной траектории к шатунной кривой исходного механизма. Было открыто явление получения «зеркальных» шатунных кривых, а также масштабированных шатунных кривых, получаемых на «составных» механизмах. Исследовательская работа была показана представителям инженерного состава авиакомпаний Восточно-сибирского регионального управления ГА в лице ОАО «Авиакомпания Байкал» и Западно-сибирского регионального управления ГА в лице филиала ОАО «Авиакомпании Сибирь».Отзывы о работе приведены в приложении I. В ходе проведения работы были предприняты попытки установить связь с ВУЗами России при помощи глобальной сети Internet После 73 отправленных запросов (по проблеме, рассматриваемой в исследовательской работе) чёткий контакт и взаимопонимание был установлен с представителями Московского Авиационного Института: доцентом кафедры ТММ А.Н. Евграфовым и его научным сотрудником В.И. Лебедевым . Итоговый ответ на запрос приведён в приложении I. Также была разработана демонстрационная программа, показывающая работу составного механизма(приложение II). Содержание Стр. Цель работы 2 Введение 3 1 Исследование механизмов, получаемых изменением размеров звеньев 1.1 Выбор объекта исследования 5 5 1.2 Механизмы, получаемые путём изменения размеров звеньев 9 1.3 Механизм, механизм, воспроизводящий эквидистантные кривые 27 2 Исследование составных механизмов 29 2.1 Получение составного механизма 29 2.2 Выявление зависимостей вида шатунной кривой 36 2.3 Применение зависимостей вида шатунной кривой к решению поставленной задачи 48 Заключение 54 Список литературы 56 Приложение I: отзывы о работе; описание демонстрационной программы Приложение II: демонстрационная программа (прилагается) 57 Цель работы Выявить возможности и способы эквидистантного изменения вида шатунной кривой любой точки произвольно взятого механизма. Введение В области авиационной промышленности, проблема получения эквидистантных кривых возникла в то время, как на смену ажурным ферменным конструкциям фюзеляжей открытого типа пришли цельнометаллические оболочковые конструкции со сложными внешними обводами (большое количество деталей силового набора планера любого современного летательного аппарата имеет эквидистантный профиль). Особенно остро проблема получения эквидистантных кривых встала в начале 70-х годов. Это было связано с началом эры сверхзвуковых самолётов (рисунок 1). Рисунок 1 — SR-71, типичный представитель «настоящих» сверхзвуковых Тогда возникла потребность получения деталей, отличающихся сложной формой контура и высокой степенью точности. Большое количество необходимых деталей имело эквидистантный профиль. Имеющееся в то время оборудование не позволяло обеспечить соответствие предъявляемым техническим требованием. Изготовление деталей производилось почти «вручную», по шаблонам, что многократно увеличивало их стоимость. Тогда возникла потребность в создании оборудования, позволяющего массово производить детали, имеющие эквидистантные поверхности. В настоящее время проблема построения эквидистантных кривых в массовой промышленности стала разрешимой благодаря применению электронных вычислительных машин и оборудования с числовым программным управлением. Но всё же в мелкосерийном производстве эта проблема по-прежнему существует. 1 Исследование механизмов, получаемых изменением размеров звеньев 1.1 Выбор объекта исследования Главным требованием, которому должны отвечать результаты исследований является то, что найденные в последствии законы изменения свойств механизма, приводящие к требуемому результату (т.е эквидистантному видоизменению траектории точки механизма) должны быть универсальными . То есть они должны быть применимыми к любому механизму. Значит объектом изучения может выступать любой плоский шарнирный механизм ( здесь и далее под словом "механизм" будут подразумеваться плоские шарнирные механизмы, так как именно они в настоящее время широко используются в технике для воспроизведения движения рабочих органов различных машин). Любой плоский механизм содержит в себе звенья, образующие вращательные кинематические пары в совокупности с неподвижным звеном (стойкой). Траекториями любых точек, принадлежащих такому звену, будут являться эквидистантные окружности или дуги окружностей, центр которых совпадает с центром кинематической пары (это такие звенья как кривошип и коромысло). Поэтому точки, относящиеся к коромыслам или кривошипам, не заслуживают внимания при рассмотрении данной проблемы. Нами будут изучаться траектории точек, принадлежащих звеньям, совершающим сложные плоскопараллельные движения (шатунам). Как было указано выше, траектории точек, принадлежащих шатуну, носят названия шатунных кривых. В качестве объекта исследования возьмём четырёхзвенный приближённо - направляющий механизм Чебышева ( шатунные кривые любого шарнирного алгебраическими четырёхзвенника кривыми шестого являются порядка). Его кинематическая схема приведена на рисунке 1.1 (начальное положение механизма выделено чёрным цветом) [1.]. Входным (ведущим) звеном механизма является кривошип ОА. Механизм обладает одной степенью подвижности, поэтому для решения задачи о положениях звеньев механизма (плана перемещений механизма) достаточно задать функцию перемещений кривошипа (звена ОА). Для кинематического исследования механизма достаточно считать движение входного звена происходящим с постоянной угловой скоростью. Решение задачи о положениях механизма во всех экспериментах будем производить графическим способом. M S=0,001 м/мм Рисунок 1.1- Приближённо-направляющий механизм Чебышева: а-план перемещений; б-примеры эквидистант шатунной кривой точки С Если рассматривать перманентное движение механизма (с постоянной угловой скоростью входного звена), то точка А будет последовательно занимать положения А 0,А1А2,... (для более точного соответствия с действительностью будем рассматривать двенадцать положений механизма). Определим положения точки С, принадлежащей шатуну ABC (рисунок 1.1) : С0, С1, С2 -- нетрудно заметить, что обход контура, занимаемых точкой С, положений осуществляется против направления угловой скорости входного звена (кривошипа О А). Соединяя последовательные положения точки С плавной кривой получаем шатунную кривую точки С, являющуюся характерной для выбранного механизма, рисунок 1.1 (примечание: здесь и далее последующие положения звеньев механизма обозначены зеленым цветом, исходная шатунная кривая красным, получаемая новые шатунные кривые голубым). Ниже на этом же рисунке показана шатунная кривая (к ней то и необходимо получить новые эквидистантные шатунные кривые) и приведен пример ее эквидистант. 1.2 Механизмы, получаемые путём изменения размеров звеньев Попробуем менять размеры отдельных звеньев исходного механизма и пронаблюдаем как меняется вид шатунной кривой точки С. Сначала будем менять, т.е. увеличивать или уменьшать размеры коромысла и шатуна (звенья О'В и ABC). Планы получаемых механизмов представлены на рисунках 1.2 - 1.5 . Изменение размеров звеньев произведены на одну и ту же величину. Ms = 0,001 м/мм Рисунок 1.2-Механизм,получаемый уменьшением длины коромысла(звена ОВ): а-план перемещений;б-соотношение исходной шатунной кривой с получаемой Ms=0,001 м/мм Рисунок 1.3 -- Механизм, получаемый увеличением длины коромысла (звена О'В): а-план перемещений; б-соотношение исходной шатунной кривой с получаемой Ms=0,001 м/мм Рисунок 1.4 -- Механизм, получаемый увеличением размера шатуна (расстояния АВ и ВС): а-план перемещений; б-соотношение исходной шатунной кривой с получаемой Ms=0,001 м/мм Рисунок 1.5- Механизм, получаемый уменьшением размера шатуна (расстояния АВ и ВС): а-план перемещений; б-соотношение исходной шатунной кривой с получаемой Сравнивая механизмов планы перемещений наблюдается необычное полученных побочное новых явление, представленное на рисунке 1.6 . Шатунные кривые точки С механизмов, полученных путём уменьшения длины коромысла и уменьшением увеличением длины длины шатуна, коромысла и и механизмов, длины полученных шатуна (причём изменение размеров произведено на одну и ту же величину) редставляют собой симметричные копии друг друга относительно вертикальной оси симметрии (т.е. шатунные кривые могут отображать друг друга в вертикально расположенном зеркале). Полученные шатунные кривые назовём зеркальными, а механизмы их воспроизводящие - аналоговыми. Ms=0,001 м/мм Рисунок 1.6 - «зеркальные» шатунные кривые точки С, полученные на «аналоговых» механизмах Продолжим эксперимент. Попробуем уменьшить, а затем увеличить расстояния между точками В и С шатуна (Рисунки 1.7 и 1.8). Уменьшение и увеличение расстояния ВС произведено в соответствии с размерными коэффициентами R1=0,5 и R2=2 (т.е. получаемые расстояния ВС соответственно в 2 раза меньше и больше исходного расстояния ВС). Ms=0,001 м/мм Рисунок 1.7 -Механизм, получаемый уменьшением размера шатуна (расстояния ВС): а-план перемещений; б-соотношение исходной шатунной кривой с получаемой Ms=0,002 м/мм a) б) Рисунок 1.8 -Механизм, получаемый увеличением размера шатуна (расстояния ВС): а-план перемещений; б-соотношение исходной шатунной кривой с получаемой Получаемые новые шатунные кривые подобны случаю, представленному на рисунке 1.6 (т.е. их также можно назвать зеркальными с учётом того, что их вид был определен на планах перемещений механизмов с разными масштабными коэффициентами длин, исходя из чего, их можно назвать масштабированными зеркальными шатунными кривыми). Обязательным условием получения «зеркальных» шатунных кривых, как в первом, так и во втором случаях является то, что изменение размеров звеньев исходного механизма должно быть произведено на одну и ту же величину. Зависимость между размерами масштабированных зеркальных шатунных кривых устанавливается такими же размерными коэффициентами R1* и R2, что и связь между расстоянием ВС исходного механизма и расстояниями ВС получаемых аналоговых механизмов (т.е. первая шатунная кривая в R1 раз меньше второй шатунной кривой, а вторая соответственно в R2 раз больше первой) рисунок 1.9. * Примечание: здесь и далее размерные коэффициенты являются безразмерными величинами Ms=0,001 м/мм Ms=0,002 м/мм Рисунок 1.9 - Масштабированные зеркальные кривые, полученные на аналоговых механизмах, представленных на рисунках 1.7 и 1.8 Попробуем изменить размеры кривошипа и стойки (рисунки 1.10-1.13). Мs=0,001м/мм a) б) Рисунок 1.10 —Механизм, получаемый уменьшением длины кривошипа (звена ОА): а-план перемещений; б-соотношение исходной шатунной кривой с получаемой Ms=0,001 м/мм a) б) Рисунок 1.11-Механизм, получаемый увеличением длины кривошипа (звена О А): а-план перемещений; б-соотношение исходной шатунной кривой с получаемой Мs=0,001м/мм a) б) Рисунок 1.12Механизм, получаемый уменьшением размера стойки (расстояние ОО'): а-план перемещений; б-соотношение исходной шатунной кривой с получаемой Мs=0,001м/мм a) б) Рисунок 1.13- Механизм, получаемый увеличением размера стойки (расстояние ОО'): а-план перемещений; б-соотношение исходной шатунной кривой с получаемой Как видно из планов перемещений всех полученных механизмов, простое изменение размеров звеньев не приводит к требуемому результату (т.е. получаемые новые траектории точки С не являются эквидистантами исходной шатунной кривой). В заключении о проделанном эксперименте обратимся к трудам Пафнутия Львовича Чебышева [2.,3]. Большую часть жизни П.Л.Чебышев посвятил метрическому синтезу механизмов. В своих работах он применял специально разработанную им теорию функций, наименее отклоняющихся от нуля. Сущность задач, которые он ставил перед собой, заключалась в том что требовалось построить шарнирный механизм, одна из точек которого описывает кривую, приближённо совпадающую с заданной кривой. Результатом решения задачи были найденные необходимые размеры звеньев механизма, отвечающего поставленным условиям. Очевидно, что простым изменением размеров отдельных звеньев исходного механизма (методом подбора) получить требуемую шатунную кривую (в данном случае эквидистантную к прежней) практически невозможно. 1.3 Механизм, воспроизводящий эквидистантные кривые Эквидистантная кривая к начальной кривой представляет собой геометрическое место положений равноудалённых точек. Из этого определения напрашивается довольно простое решение поставленной в исследовательской работе задачи, представленное на рисунке 1.14. К исходному механизму в точке С , описывающей требуемую шатунную кривую присоединено дополнительное звено CD кривошип. Полученный "новый" механизм обладает двумя степенями подвижности. Кривошип исходного механизма сохраняет свою угловую скорость - постоянной. Каждое занимаемое положение присоединённого звена должно быть подобрано так, что в каждый момент времени последнее звено располагается нормально к исходной шатунной кривой. Это достигается тем, что кривошип вращается в направлении, совпадающем с направлением обхода контура шатунной кривой точки С. Причём вращение кривошипа относительно шатуна ABC совершается не равномерно, а по определённому закону (т.е. значение угловой скорости кривошипа не остаётся постоянным в течение одного цикла работы механизма, более подробно принцип вращения кривошипа «по определённому» закону рассмотрен в разделе 2). Мs=0,001м/мм a) б) Рисунок 1.14 -- Механизм описывающий эквидистантные кривые: а-план перемещений; б-кривые точек С и D 2 Исследование составных механизмов 2.1 Получение составного механизма К исходному механизму (рисунок 1.1) в точке, описывающей нужную шатунную кривую, попробуем присоединить, такой же механизм. Каждая точка стойки присоединяемого механизма будет двигаться по закону точки, к которой производится присоединение, т.е. вся стойка в целом совершает поступательное движение без вращения вдоль траектории точки С. По отношению к стойке исходного механизма, стойка присоединяемого механизма оказывается мнимой, превращаясь из неподвижного звена в подвижное. Полученный "составной" механизм будет обладать двумя степенями подвижности. Зададим вращение входных звеньев исходного механизма и присоединённого так, что каждому действительному положению кривошипа исходного механизма (звена ОА) будет соответствовать такое же относительное положение кривошипа (звена CD) присоединённого механизма (т.е. оба кривошипа составного механизма будут вращаться синхронно с одинаковыми угловыми скоростями, направленными в одну сторону). План перемещений полученного механизма приведён на рисунке 2.1. M s =0,002 м/мм Рисунок 2.1-План перемещений составного механизма. Как видно из плана перемещений, точка F присоединённого механизма описывает кривую, аналогичную шатунной кривой исходного механизма. Попробуем установить зависимость между исходной шатунной кривой с получаемой. Для чего будем менять размеры присоединяемого механизма в соответствии с размерным коэффициентом К=0,5 и К=2 (размерный коэффициент устанавливает связь между размерами присоединяемого и исходного механизмов) рисунки 2.2 и 2.3. M s =0,001 м/мм Рисунок 2.2-План перемещений составного механизма (размерный коэффициент присоединяемого механизма К=0,5) Ms = 0,002 м/мм Рисунок 2.3-План перемещений составного механизма (размерный коэффициент присоединяемого механизма К=2) Из планов перемещений получаемых механизмов видно, что новые шатунные кривые в точности соответствуют исходной кривой с учётом размерного коэффициента, который определится из формулы (2.1). Мр=1+К, (2.1) Где, К - размерный коэффициент присоединяемого механизма. Для рисунков 2.1, 2.2, 2.3: Мр1=1+1=2 ; Мр2=1+0,5=1,5; Мр3=1+2=3 . Значит, получаемые новые шатунные кривые будут соответственно в 2; 1,5 и 3 раза больше исходной шатунной кривой. Масштабированные шатунные кривые эквидистантными, что видно из рисунка 2.4. не являются Ms = 0,002 м/мм Рисунок 2.4- Соотношение получаемых «масштабированных» шатунных кривых с исходной 2.2 Выявление зависимостей вида шатунной кривой составного механизма Узнаем, можно ли каким-то образом приблизить вид масштабированной шатунной кривой к эквидистантному. Заставим исходный и присоединяемый механизмы работать в разных фазах, сохраняя равенство угловых скоростей входных звеньев обоих механизмов (входное звено присоединённого механизма, вращаясь с такой же угловой скоростью что и входное звено исходного механизма, будет опережать последнее на некоторый угол, равный разности фаз, т.е. разности стартовых углов, отсчитываемых от нулевого положения кривошипа исходного механизма по направлению вращения) рисунки 2.5 - 2.10. Ms=0,002 м/мм Рисунок 2.5- План перемещений составного механизма (сдвиг по фазе 30°) Ms = 0,002 м/мм Рисунок 2.6- План перемещений составного механизма (сдвиг по фазе 60°) Ms = 0,002 м/мм Рисунок 2.7- План перемещений составного механизма (сдвиг по фазе 90°) Ms=0,002 м/мм Рисунок 2.8- План перемещений составного механизма (сдвиг по фазе 120°) Ms=0,002 м/мм Рисунок 2.9 - План перемещений составного механизма (сдвиг по фазе 150°) Ms=0,002 м/мм Рисунок 2.10 - План перемещений составного механизма (сдвиг по фазе 180°) Дальнейшее увеличение разности фаз будет приводить к тому, что будет происходить повторение вида шатунных кривых, получаемых на присоединённых составных механизмов механизмах, которых ведущие будут звенья работать в противоположных фазах (т.е. повторение произойдёт при следующих значениях разностей фаз: 30° -330°; 60° -300°; 90°270°; 120° - 240°; 150°- 210°). Попробуем изменить модуль угловой скорости ведущего звена присоединённого механизма, оставив угловую скорость кривошипа исходного механизма без изменений (рисунки 2.11, 2.12). Ms = 0,002 м/мм б) Рисунок 2.11- План перемещений составного механизма (модуль угловой скорости ведущего звена присоединяемого механизма 4 в два раза больше модуля угловой скорости исходного механизма ) M s =0,002 м/мм Рисунок 2.12- План перемещений составного механизма (модуль угловой скорости ведущего звена присоединяемого механизма 4 в два раза меньше модуля угловой скорости исходного механизма 1) Как видно из рисунка 2.13, нам не удалось получить шатунную кривую, эквидистантную к исходной кривой. Однако в результате эксперимента было открыто очень важное свойство составного механизма: видом шатунной кривой можно управлять без какихлибо изменений в структурной схеме механизма, достаточно изменять закон движения входного звена присоединённого механизма (т. е. , например, менять стартовый угол или значение угловой скорости). Мs=0,001м/мм Рисунок 2.13 - Шатунные кривые, полученные на составном механизме 2.3 Применение зависимостей вида шатунной кривой составного механизма к решению поставленной задачи Как было указано в п.2.2, видом шатунной кривой составного механизма можно управлять простым изменением закона движения входного звена, присоединённого механизма, без какихлибо изменений в структурной схеме всего составного механизма (при неизменной угловой скорости входного звена исходного механизма). Синтезируем присоединенного закон движения механизма, входного необходимы для звена , получения эквидистантной шатунной кривой, к кривой точки С. Полученный закон движения кривошипа приведен на рисунке 2.14.1 (приведены планы перемещения вращательном движении последнего кривошипа при относительно неподвижной стойки). Каждому последующему положению кривошипа исходного механизма А0, А1 А2... , соответствует последующее положение кривошипа присоединенного механизма D0, D1, D2.. Ms=0,0005 м/мм Рисунок 2.14.1 - Закон движения входного звена присоединённого механизма Как видно из рисунка 2.14.1, кривошип в течение единого цикла работы постоянно изменяет свою угловую скорость и движется под действием переменного углового ускорения. Синтез закона вращения кривошипа присоединённого механизма произведён по следующему алгоритму: а) к шатунной кривой исходного механизма графическим способом была построена эквидистантная кривая (рисунок 2.14.2), Мs=0,001м/мм Рисунок 2.14.2- Кривые получаемые на составном механизме при вращении входного звена присоединённого механизма по закону, представленному на рисунке 2.14.1 б) Соответствующие закону вращения (рисунок 2.14.1) положения кривошипа присоединённого механизма были подобраны таким образом, что точка F в каждом положении кривошипа исходного механизма принадлежала эквидистантной кривой. План перемещений составного механизма, описывающего эквидистантные шатунные кривые, приведён на рисунке 2.15. Мs=0,001 м/мм Рисунок 2.15 Заключение Из проделанной выше исследовательской работы видно, что возможности эквидистантного видоизменения траектории точек механизмов существуют. В ходе работы было выявлено два способа осуществления поставленной цели. Первый способ заключается в том, что в точке, описывающей нужную шатунную кривую присоединяется дополнительное звено кривошип, который, вращаясь по определенному закону const), 4 описывает своей крайней точкой эквидистанту к исходной кривой. Причем, при таком способе исчезает проблема "подгонки" механизма под заданную эквидистанту (т.е. под заданное расстояние отстояния последней от исходной кривой). Расстояние отстояния достаточно отложить от точки С присоединения кривошипа (звено CD), тогда на отложенном расстоянии найдется точка, описывающая требуемую эквидистанту. Второй способ к исходному механизму в точке, описывающей нужную кривую, присоединяется точно такой же механизм. Как и в первом случае, ведущее звено присоединяемого механизма, необходимо вращать по определенному закону. Недостаток второго способа заключается в том, что расстояние отстояния эквидистанты от исходной кривой зависит от размерного коэффициента присоединяемого механизма (т.е. для получения нужного расстояния отстояния необходимо подбирать размер всего присоединяемого механизма). Из двух возможных вариантов достижения цели, поставленной в исследовательской работе, вытекает новая задача-- необходимо выявить возможность и способы практического получения закона движения в первом случае кривошипа, описывающего эквидистанту, во втором случае кривошипа ведущего звена присоединяемого механизма. Список литературы 1. Чебышев Пафнутий Львович. ПЛ.Чебышева. - М.,Л-, 1945г. 192с. Научное наследие 2. Чебышев Пафнутий Львович. Полное собрание сочинений M.Л., 1948г. т.4.: Теория механизмов. 1948г. 225с. 3. Чебышев Пафнутий Львович. Теория механизмов, известных под названием параллелограммов. -М.,Л., 1949г. 80с. 4. «Отчет о научно - исследовательской работе», структура и правила оформления: ГОСТ 7.32 - 91. -.: Издательство стандартов, 1991. - 18 с. ПРИЛОЖЕНИЕ I Отзыв о исследовательской работе. Воплощение идей, высказанных в работе, в реальных механизмах предвидеть сложно, т.к. все открытые в работе свойства и зависимости не испытаны на практике. Исходя из этого, нельзя взвесить все плюсы и минусы высказанных идей. О возможной области применения данной работы сказать ничего не могу. С уважением! главный инженер ИАС ОАО «Авиакомпания «Байкал Комаров В.К. Отзыв о исследовательской работе Проанализировав возможность применения данного механизма в авиационном производстве, мы пришли к выводу, что в данный момент подобные устройства полностью не применимы в массовом производстве, из-за дороговизны его внедрения и ограниченности его технических возможностей в сравнении со станками с ЧПУ, и лазерной обработкой. Однако такое устройство может занять достойное место в производстве мелкосерийных, высокоточных деталей сложной формы, конструкции которых не позволяют применять стандартное оборудование. Изготовление таких деталей требует высококлассной работы специалистов, сравнительно больших материальных затрат, поэтому, при проектировании самолета применение таких деталей нецелесообразно. Особенно остро эта проблема стоит в современном двигателестроении. Но применение подобных механизмов в этой области самолетостроения в дальнейшем может значительно упростить производство. Генеральный директор ОАО «Авиакомпания «Байкал» Панфилов В.Г. Отзыв Проанализировав идею получения эквидистантных кривых, высказанную в исследовательской работе, я пришёл к выводу, что применение ей можно найти в области машиностроения. Действительно, в этой области промышленности возникают потребности воспроизведения эквидистант, удовлетворяющиеся применением информационных технологий (в частности, такие проблемы решаются на станках с числовым програмным управлением). Что касается «масштабированных» кривых, то приведем простой пример: при изготовлении большой детали инструмент должен обойти ее контур, и конечно, никто не будет изготавливать шаблон такого же размера. Насколько я знаю, для этого существуют копировальные устройства. По поводу «зеркальных» кривых сказать ничего не могу. Воплотится ли эта идея в жизнь, утверждать сложно. Она до конца не доработана. Желаю удачи! Главный инженер AT Восточно-Сибирского Филиала ОАО «Авиакомпания Сибирь» Петров Г.В. Представление на программу Программа демонстрирует работу составного механизма, состоящего из двух приближенно - направляющих механизмов П.Л.Чебышева. В программе наглядно показана зависимость вида шатунной кривой составного механизма от разности фаз работы механизмов, последовательно соединённых между собой. Программа написана на языке высокого уровня TURBO PASCAL 7.0 в 2001 году. Размер 40,0 кБайт Системные требования: 1. Процессор 386DX и выше 2. MS DOS 6 и выше или Windows 9X, работа под Windows NT/ 2000/ ХР не гарантирована Исполнители работы : А.Е. Милов И.В. Колмогорцев Е.О. Пискунов И.М. Рязанов А.В. Кулагин Руководитель работы; Доцент кафедры КСМ П.В. Королев Рецензия на представленную программу. Демонстрационная программа наглядно показывает: работу составного механизма - построение шатунной кривой, позволяет варьировать параметры работы механизма, не требует высокой производительности системы. Данную программу можно использовать как наглядное пособие при проведении практических занятий по дисциплине "Теория машин и механизмов". Вед. инженер кафедры КСМ В. С. Комаров 19 декабря 2001 г. Письмо,полученное по электронной почте от доцента, кафедры ТММ Московского авиационного института господина А.Н.Евграфова: Уважаемые студенты ИрГТУ! Судя по с мыслу Вашей исследовательской работы , речь идет о воспроизведении заданных траекторий с изменением масштаба. Для этих целей и спользуются и звестные в технике механизмы типа пантографов (см., напр., Крайнев А.Ф. Словарь-справочник по механизмам. -М.:Машиностроение, изда ния разных лет.). Дополнительно можем Вам рекомендовать ознакомиться с работами профес сора Пейсаха Э.Е., зани мающего ся вопросами синтеза механизмов, воспроизводящих Заданные траектории движения точек: Э. Е.Пейсах, В.А.Нестеров. Система проектирования плоск их рычажных механизмов /Под ред. К.В.Фролова.-М.:Машиностроение, 1987. -232 с.:илл. Желаем успеха. А.Н.Евграфов, В.И.Лебедев. e-mail: evgrafov@mebil. stu. neva. ru