Учебное пособие (часть 2).
advertisement
.")
Н. Б. ЛЕВЧЕНКО
СОПРОТИВЛЕНИЕ МАТЕРИАЛОВ
ЧАСТЬ 2
Санкт-Петербург
2011
2
Министерство образования и науки Российской Федерации
Санкт-Петербургский государственный архитектурно-строительный
университет
Автомобильно-дорожный факультет
Кафедра сопротивления материалов
Н. Б. ЛЕВЧЕНКО
СОПРОТИВЛЕНИЕ МАТЕРИАЛОВ
Учебное пособие по выполнению расчетно-графических
работ для студентов всех специальностей и форм обучения
ЧАСТЬ 2
Задачи № 12–24, 26, 27
Под редакцией д-ра техн. наук, проф. В. Д. Харлаба
Санкт-Петербург
2011
3
УДК 539.3/8(07)
Сопротивление материалов: Учебное пособие по выполнению расчетно-графических работ для студентов всех специальностей и форм
обучения. Ч. 2 / Н. Б. Левченко; СПбГАСУ. СПб., 2010. с.
В пособии даны краткие сведения из теории, необходимые для
решения задач, и приводятся примеры решения задач, входящих в
расчетно-графические работы, по теме "Изгиб" с подробными объяснениями.
Ил. 55. Табл. 3. Библиогр. 7 назв.
Рецензенты:
д-р техн. наук, проф. В. З. Васильев (Санкт-Петербургский государственный университет путей сообщения);
д-р техн. наук, проф. В. В. Улитин (Санкт-Петербургский государственный университет низкотемпературных и пищевых технологий)
Рекомендовано Редакционно-издательским советом СПбГАСУ в
качестве учебного пособия
© Н. Б. Левченко, 2011
© Санкт-Петербургский государственный
архитектурно-строительный университет, 2011
4
ОБЩИЕ УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ РАСЧЕТНО-ГРАФИЧЕСКИХ
РАБОТ
В процессе изучения курса "Сопротивление материалов" студенты выполняют расчетно-графические работы (РГР). Количество РГР и
задач, входящих в каждую из этих работ, зависит от специальности и
количества часов, отведенных в учебном плане на изучение курса.
Цель РГР – сознательное усвоение теоретического курса и приобретение навыков решения задач, имеющих как академический, так и
практический характер.
Данное учебное пособие предназначено для оказания помощи
студентам при выполнении расчетно-графических работ. Номера задач, решение которых объясняется в данном пособии, соответствуют
номерам задач в методических указаниях [4], по которым студенты
выбирают схемы решаемых задач.
В данном пособии приводятся краткие теоретические сведения и
основные формулы, необходимые для выполнения задач, объясняются
смысл и порядок решения задач. Решение одних задач сопровождается численными расчетами, решение других приведено в общем виде.
Ни в коем случае не следует копировать решение задач, не разобравшись со смыслом того, что вы делаете. Пособие не заменяет учебник,
поэтому перед выполнением задач прочитайте те разделы учебников,
которые приведены в перечне литературы по изучаемой теме. В процессе расчетов обращайте внимание на единицы измерения величин,
входящих в формулы. Не забывайте писать, в каких единицах Вы получили результат. Рекомендуемые единицы измерения приведены в
перечне используемых обозначений. Все арифметические вычисления
следует выполнять с точностью до трех значащих цифр – точностью,
достаточной для инженерных расчетов.
Расчетно-графические работы оформляются на одной стороне
стандартных листов писчей бумаги формата А-4 (210х297). Перед решением задачи необходимо нарисовать расчетную схему задачи в
масштабе в соответствии со своими данными. Решение задачи должно
сопровождаться короткими пояснениями, рисунки желательно делать
карандашом, на листах должны быть оставлены поля для замечаний
5
преподавателя. После выполнения всех задач, входящих в расчетнографическую работу, листы с решением следует сброшюровать и
снабдить титульным листом.
ИСПОЛЬЗУЕМЫЕ ОБОЗНАЧЕНИЯ
Нагрузки:
F – сосредоточенная сила, кН;
M – сосредоточенная пара сил (момент), кНм;
q – интенсивность распределенной по длине стержня нагрузки, кН/м.
Обозначение осей:
x – продольная ось стержня;
y , z – главные центральные оси инерции поперечного сечения стержня.
Геометрические характеристики поперечного сечения стержня:
A – площадь поперечного сечения, см2;
Sy, Sz – статические моменты относительно осей y, z , см3;
Iy, Iz – осевые моменты инерции относительно осей y, z , см4;
Ip– полярный момент инерции, см4.
Внутренние усилия:
N – продольная сила, кН;
Qy , Qz , (Q) – поперечные силы, кН;
My , Mz, (M) – изгибающие моменты кНм;
Mк – крутящий момент, кНм.
Напряжения:
x , y , z , () – нормальные напряжения, МПа;
xy , yz , zx , () – касательные напряжения, МПа;
1 , 2 , 3 , (гл) – главные напряжения, МПа.
Деформации и перемещения:
x , y , z , () – относительные линейные деформации;
xy , yz , zx , () – угловые деформации (углы сдвига);
l – абсолютная деформация стержня при растяжении-сжатии (перемещение точек оси вдоль оси x), см;
v, w – прогибы оси стержня (балки) при изгибе (перемещения точек оси
вдоль осей y, z), см;
– угол поворота оси стержня (балки) при изгибе, рад;
– угол закручивания стержня (вала) при кручении, рад.
6
Характеристики материала:
пц – предел пропорциональности, МПа;
т – предел текучести, МПа;
в – временное сопротивление (для хрупких материалов рв – предел
прочности при растяжении, св – предел прочности при сжатии), МПа;
[], [] – допускаемые напряжения, МПа;
E – модуль упругости, МПа;
– коэффициент Пуассона;
– коэффициент линейного температурного расширения, 1/град.
7
4. ИЗГИБ
Основные понятия и формулы
Изгиб – такой вид деформации стержня, при котором его ось
искривляется. Стержень, подверженный изгибу, называется балкой.
Конструкция, состоящая из нескольких изгибаемых стержней, соединенных между собой чаще всего под углом 90, называется рамой. В
данном разделе рассматриваются балки и рамы, подверженные плоскому поперечному изгибу. В этом случае вся нагрузка приложена перпендикулярно оси стержня в одной плоскости, совпадающей с плоскостью симметрии поперечного сечения; изогнутая ось является
плоской кривой. При плоском поперечном изгибе в балке возникают
два вида внутренних усилий: поперечная сила Q и изгибающий момент M. В раме при плоском поперечном изгибе возникают три усилия: продольная N, поперечная Q силы и изгибающий момент M.
Правила знаков для поперечной силы и изгибающего момента
зависят от вида рассматриваемой конструкции (прямолинейная балка,
рама, криволинейный стержень) и приведены в соответствующих разделах.
Перед тем, как использовать метод сечений для определения
внутренних усилий, как правило, надо найти опорные реакции, возникающие в закреплении стержня. Если опорные реакции и внутренние усилия можно найти из уравнений статики, то конструкция называется статически определимой. Чаще всего мы встречаемся с тремя
видами опорных закреплений стержней: жестким защемлением (заделкой), шарнирно-неподвижной опорой и шарнирно-подвижной
опорой. На рис. 4.1 показаны эти закрепления. Для неподвижной
(рис 4.1, б) и подвижной (рис. 4.1, в) опор приведены два эквивалентных обозначения этих закреплений. Напомним, что при действии
нагрузки в одной плоскости в заделке возникают три опорных реакции (вертикальная, горизонтальная реакции и сосредоточенный реактивный момент) (рис. 4.1, а); в шарнирно-неподвижной опоре – две
8
а
МА
б
HA
RA
А
А
А
HA
в
А
А
HA
RA
RA
RA
RA
Рис. 4.1. Опорные реакции:
а – в заделке; б – в шарнирно-неподвижной опоре;
в – в шарнирно-подвижной опоре
реактивные силы (рис. 4.1, б); в шарнирно-подвижной опоре – одна
реакция – сила, перпендикулярная плоскости опирания (рис. 4.1, в).
После определения опорных реакций внутренние усилия в статически определимых конструкциях определяем с помощью метода
сечений. Подробно процесс определения внутренних усилий рассматривается при решении конкретных задач.
Когда внутренние усилия найдены, можно определить напряжения в поперечном сечении изгибаемого стержня. В произвольной точке поперечного сечения возникают нормальное и касательное напряжения, которые для прямолинейных стержней находятся следующим
образом:
*
нормальные напряжения в балке определяются по формуле1
Mz
x
,
(4.1)
Iy
где М – величина изгибающего момента в рассматриваемом сечении; z
– координата той точки поперечного сечения, в которой определяется
, в главной центральной системе координат; I y – осевой момент
инерции относительно главной центральной оси y. Распределение
нормальных напряжений по высоте сечения показано на рис. 4.2, а.
Ось y, на которой нормальные напряжения равны нулю, называется
нейтральной осью;
В рамах при наличии продольной силы к нормальным напряжениям добавляется слагаемое N A .
1
9
касательные напряжения определяются по формуле Журавско-
го :
2
xz
QS oy ( z )
.
(4.2)
I y b( z )
В формуле Журавского Q – значение поперечной силы в рассматриваемом сечении; S oy ( z ) – статический момент отсеченной части сечения, зависящий от того, в какой точке определяется касательное
напряжение; b(z) – ширина сечения на уровне точки, в которой находится напряжение. Например, на рис. 4.2, б заштрихована отсеченная
часть сечения и показана ширина b(z) при определении касательных
напряжений в точках, удаленных от оси y на расстояние z.
а
б
y
y
z
zmax
z
max
Mz
Iy
z
z
b(z)
Эпюра
Рис. 4.2. К определению напряжений при изгибе:
а – распределение нормальных напряжений по высоте балки;
б – определение отсеченной части сечения в формуле Журавского
Из формулы (4.1) следует, что максимальные нормальные
напряжения действуют в точках, наиболее удаленных от оси y
(нейтральной оси). Для определения максимальных напряжений из
формулы (4.1) можно получить
Заметим, что формула Журавского для стержней массивного поперечного сечения дает величину не полного касательного напряжения x, а его проекции на ось z (xz). Для тонкостенных стержней (двутавр, швеллер) по формуле
Журавского можно найти полное касательное напряжение x в любой точке поперечного сечения.
2
10
max
M
Wy
,
(4.3)
где W y I y z max – момент сопротивления балки при изгибе. Для балок круглого и прямоугольного сечений моменты инерции и моменты
сопротивления находятся по формулам
bh3
r 4
;
;
(4.4)
Iy
Iy
4
12
r 3
bh 2
;
.
(4.5)
Wy
Wy
4
6
Закон распределения касательных напряжений, определяемых по
формуле Журавского, зависит от формы поперечного сечения. Для балок круглого и прямоугольного сечений касательные напряжения изменяются по высоте балок по закону квадратной параболы
(рис. 4.3, а). Они равны нулю в точках, наиболее удаленных от
нейтральной оси y, и максимальны в точках, лежащих на оси y. Из
формулы (4.2) для балок круглого и прямоугольного сечений следуют
формулы для определения максимальных касательных напряжений
4Q
3Q
;
.
(4.6)
max
max
3A
2A
Очень часто употребляемым сечением для балок является двутавр. Касательные напряжения в полках и стенках двутавровой балки
распределяются по разным законам. Наиболее важными при проверке
прочности являются касательные напряжения в стенке двутавра. На
рис. 4.3, б показана эпюра распределения касательных напряжений в
стенке двутавра. Максимальные касательные напряжения в двутавровой балке так же, как и в балках круглого и прямоугольного сечений,
действуют в точках, лежащих на нейтральной оси y. Об определении
касательных напряжений в двутавре подробно будет сказано при решении задачи о проверке прочности двутавровой балки.
11
max
б
а
h/2
y
h/2
r
z
y
b/2 b/2
y
max
Эпюра
z
Эпюра
z
Рис. 4.3. Распределение касательных напряжений по высоте:
а – балок круглого и прямоугольного сечений;
б – двутавровой балки
Основной задачей расчета конструкций явxz =
ляется обеспечение их прочности. Известно, что
условие прочности в точке тела зависит от матеx =
риала и от вида напряженного состояния в этой
точке. Напряженное состояние произвольной точРис. 4.4. "Балочное"
ки стержня при изгибе (балки) показано на
напряженное
рис. 4.4. Назовем такое напряженное состояние
состояние
"балочным". Это частный случай плоского
напряженного состояния, которое отличается от
общего случая отсутствием на площадках, перпендикулярных оси z, нормальных напряжений. Для "балочного"
напряженного состояния из теорий прочности получены частные
формулы проверки прочности. Для хрупких материалов справедливы:
*
вторая теория прочности
1
1
2 4 2 [ ] р ;
(4.7)
2
2
*
теория Мора ( k рв св )
1 k
1 k
2 4 2 [ ] р ;
(4.8)
2
2
для пластичных материалов используются
12
*
третья теории прочности
(4.9)
*
2 4 2 [ ] ;
четвертая теория прочности
2 3 2 [] .
(4.10)
13
4.1. РАСЧЕТ СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ БАЛОК
Рекомендуемая литература
Александров А. В., Потапов В. Д., Державин Б. П. Сопротивление материалов. М.: Высш. шк., 1995. Гл. 2 ( § 2.4–2.5), гл. 4 (§ 4.1, 4.2), гл. 6 (§ 6.1–6.3),
гл. 7 (§ 7.1, 7.2), гл. 8 (§ 8.1–8.5, 8.9).
Гастев В. А. Краткий курс сопротивления материалов. М.: Физматгиз,
1977. Гл. 5 (§ 21–25), гл. 15, гл. 8.
Дарков А. В., Шпиро Г. С. Сопротивление материалов. М.: Высш. шк.,
1989. Гл. 5 (§ 5.1–5.5), гл. 7 (§ 7.1–7.8, 7.10, 7.13–7.14), гл. 11 (§ 11.4, 11.5).
Основные определения
Статически определимая балка – балка, в которой опорные
реакции, а, следовательно, и внутренние усилия можно найти из одних уравнений статики.
Осваивать расчет статически определимых балок удобно, рассматривая по очереди следующие вопросы:
Определение внутренних усилий в балках.
Проверка прочности балок.
Определение перемещений и проверка жесткости балок.
Решение этих вопросов получим в соответствующих разделах на
примере конкретных задач.
Примеры решения задач
4.1.1. Определение внутренних усилий в балках
при плоском поперечном изгибе (задачи № 12–15)
Рекомендуемая литература
Александров А. В., Потапов В. Д., Державин Б. П. Сопротивление материалов. М.: Высш. шк., 1995. Гл. 2 (§ 2.5).
Гастев В. А. Краткий курс сопротивления материалов. М.: Физматгиз,
1977. Гл. 5 (§ 22).
Дарков А. В., Шпиро Г. С. Сопротивление материалов. М.: Высш. шк.,
1989. Гл. 7 (§ 7.1–7.5).
14
Как было сказано выше, при плоском поперечном изгибе в балке
возникают два внутренних усилия: поперечная сила Q и изгибающий
момент M. В соответствии с методом сечений из уравнений отсеченной части балки следует, что поперечную силу можно найти как сумму проекций всех внешних сил, взятых с одной стороны от сечения,
на ось, перпендикулярную оси стержня (ось z). Изгибающий момент
численно равен сумме моментов всех внешних сил, взятых с одной
стороны от сечения, относительно оси, проходящей через центр тяжести рассматриваемого сечения (оси y).
Введем правила знаков для поперечной силы и изгибающего момента. Поперечная сила считается положительной, если она обходит сечение по часовой стрелке (т. е. сила, находящаяся слева от сечеa
Q>0
б
M>0
M>0
Q>0
Рис. 4.5. Правило знаков: а – для поперечной силы;
б – для изгибающего момента в балке
ния и направленная вверх, или сила, находящаяся справа от сечения и
направленная вниз, – положительны) (рис. 4.5, а). Изгибающий момент положителен, если он изгибает балку выпуклостью вниз. Обращаем внимание на то, что знак внутреннего усилия – изгибающего
момента – зависит от того, с какой стороны от сечения находится момент3. Как видно из рис. 4.5, б момент, находящийся слева от сечения,
действует по часовой стрелке, а момент, расположенный справа от сечения, – против часовой стрелки. И оба они положительны.
При построении эпюр Q и М договоримся на эпюре Q положительные значения откладывать сверху нулевой линии. На эпюре М у
Не следует путать правило знаков для внешних моментов, которое используется при составлении уравнений равновесия и часто зависит от желания
составителя уравнения, с правилом знаков для изгибающего момента – внутреннего усилия.
3
15
строителей принято откладывать положительные ординаты снизу. Такое правило построения эпюры М называется построением эпюры со
стороны растянутых волокон, т. е. положительные значения М откладываются в сторону выпуклости изогнутой балки.
Известно [2], что изгибающий момент М, поперечная сила и интенсивность распределенной нагрузки q связаны между собой такими
дифференциальными зависимостями:
dM
Q,
(4.11)
dx
dQ
q
(4.12)
dx
и, как следствие (4.11) и (4.12),
d 2M
q .
(4.13)
dx 2
При выводе формул (4.11)–(4.13) нагрузка q считалась положительной, если она направлена вниз.
Из определений для поперечной силы и изгибающего момента,
а также из дифференциальных зависимостей (4.11)–(4.13) вытекают
следующие правила проверки правильности построения эпюр Q и М:
На эпюре Q под сосредоточенной силой имеет место скачок на величину этой силы. На эпюре М в этом сечении должен быть перелом,
т. е. резкое изменение угла наклона прямой (или касательной к кривой).
На эпюре М скачок имеет место под сосредоточенной парой на величину этой пары.
Из зависимостей (4.11), (4.12) можно определить вид функций Q и
М:
если на участке отсутствует распределенная нагрузка (q = 0),
то Q const , а М – линейная функция x;
если на участке действует равномерно распределенная
нагрузка (q = const), то Q – линейная функция, а М – квадратная парабола;
16
если на участке действует линейно распределенная нагрузка,
то соответственно Q является квадратной параболой, а М – кубической.
3. Характер поведения функции на участке (то есть ее возрастание или убывание) зависит, как известно, от знака первой производной функции. И из дифференциальных зависимостей (4.11), (4.12)
следует:
если на участке распределенная нагрузка q > 0 (действует
вниз), то поперечная сила Q на этом участке является убывающей
функцией;
если на участке поперечная сила положительна, то функция
М(x) возрастает;
если на участке в каком-то сечении x 0 функция Q ( x0 ) 0 , то
на эпюре М в этом сечении имеет место экстремум.
4. По знаку второй производной функции определяется выпуклость функции. Из зависимости (4.13) вытекает, что эпюра М всегда
имеет выпуклость в сторону действия распределенной нагрузки (q –
вниз, выпуклость – вниз и наоборот). По знаку второй производной от
Q можно определить выпуклость эпюры Q. Из (4.11)
d 2Q
dq
dx
dx 2
d 2Q
0 и эпюра Q имеет
и, если q(x) – возрастающая функция, то
dx 2
выпуклость вверх.
6. Из (4.11) следует, что
M
x2
x1
x2
Q( x)dx .
x1
Это означает, что приращение изгибающего момента М на участке
между сечениями х1 и х2 равно площади эпюры Q на указанном
участке.
7. Из (4.12) получим:
17
x2
Q x q ( x)dx .
x2
1
x1
То есть приращение поперечной силы Q на участке между сечениями х1 и х2 равно площади графика q(x) на этом участке. Например,
если нагрузка q является равномерно распределенной, то площадь
графика q равна q l , где l – длина участка, на котором действует q.
Примечание. Зависимости (4.11) и (4.12) и перечисленные правила справедливы, если начало отсчета x вести слева направо и эпюру
М строить со стороны растянутых волокон.
Рекомендуем после построения эпюр обязательно проанализировать результаты, проверив выполняются ли все перечисленные правила в решенной Вами задаче.
18
Пример 1
Условие задачи
Дана балка с действующими на нее нагрузками (рис. 4.6, а). Требуется определить внутренние усилия – поперечную силу Q и изгибающий момент М в балке, построить графики их изменения вдоль
оси стержня (эпюры Q и М).
а
x1
x2
q1=15 кН/м
F2=30 кН
x3
М= 60 кНм МА=5 кНм
B
А
F1=20 кН
a=2 м
б
20
q2=10 кН/м
b=1 м
c=1 м
RA=30 кН
Эпюра Q
10
x0=1,33 м
30
40
25
Mmax=13,3
кНм
10
Эпюра М
5
35
Рис. 4.6. К решению примера 1 по построению эпюр Q и М:
а – схема балки с нагрузками;
б – эпюры поперечной силы и изгибающего момента
19
Решение
Прежде всего, найдем опорные реакции. Балка имеет жесткое
защемление на правом конце4 и в этом закреплении при заданной вертикальной нагрузке возникают две опорные реакции: вертикальная
реакция RA и реактивный момент MA. Горизонтальная реакция при
действии вертикальной нагрузки равна нулю. Это следует из уравнения равновесия "сумма проекций всех сил на горизонтальную ось
равна нулю". Определим RA и MA, используя два других уравнения
статики. Желательно составлять такие уравнения, в каждое из которых входит только одна неизвестная. В данном случае такими уравнениями являются "сумма проекций всех сил на вертикальную ось (ось
z) равна нулю" и "сумма моментов всех сил относительно точки А
равна нулю":
z 0 ; F1 F2 q1a q2b R A 0 ;
mA 0 ;
F1 (a b c) F2 (b c) q1a(a / 2 b c) q2b(b / 2 c) M M A 0.
Из первого уравнения найдем RA = 30 кН, из второго – МА =5 кНм.
Полученные положительные знаки опорных реакций подтверждают
выбранные нами направления опорных реакций: RA – вверх, а МА –
против часовой стрелки. Для проверки рекомендуем использовать
любое другое уравнение равновесия, например mB 0 :
– 302 – 1521 – 60 + 1012,5 + 304+5 = – 150 + 150 = 0.
Теперь определяем внутренние усилия: поперечную силу Q и изгибающий момент М. В соответствии с методом сечений рассекаем
балку на каждом участке (в данной задаче их три) произвольным сечением и рассматриваем все силы, расположенные с одной стороны от
сечения: слева или справа. Удобно рассматривать все силы с той стороны от сечения, где сил меньше. Начало отсчета координаты x на
каждом участке можно выбирать произвольным образом. Например,
В балке с заделкой можно строить эпюры Q и М без определения опорных реакций, рассматривая все силы с одной стороны от сечения – со свободного конца. Но студенту, только начинающему осваивать построение эпюр, рекомендуем все же реакции находить. Это дополнительная проверка правильности решения задачи.
4
20
на рис. 4.6, а начало отсчета x на каждом участке – свое и находится в
начале участка. Запишем выражения для Q и М на каждом участке.
Участо к 1: 0 x1 a .
Рассмотрим силы, расположенные слева от сечения. По определению поперечной силы и с учетом правила знаков для Q (см.
рис. 4.5, а):
Q( x1 ) F1 q1 x1 .
Здесь q1 x1 – равнодействующая равномерно распределенной нагрузки, действующей слева от сечения.
По определению изгибающего момента и с учетом правила знаков для М (см. рис. 4.5, б):
M ( x1 ) F1 x1 q1 x1 x1 2 ,
где во втором слагаемом x1 2 – плечо равнодействующей равномерно
распределенной нагрузки ( q1 x1 ), взятой слева от сечения (равнодействующая приложена по середине длины отсеченной части балки x1).
Для построения эпюр найдем значения Q и М на границах участка:
в начале участка (х1 = 0) Q F1 , а M 0 ;
в конце участка ( x1 a ) Q F1 q1a ; M F1a q1 a 2 2 .
Участо к 2 : 0 x2 b .
Снова рассмотрим все силы, расположенные слева от сечения.
Q( x2 ) F1 q1a F2 q2 x2 ;
M ( x2 ) F1 (a x2 ) q1a(a 2 x2 ) F2 x2 q1 x2 x2 2 .
Граничные значения Q и М:
в начале участка ( x 2 0 ) Q F1 q1a F2 ;
M F1a q1 a 2 2 ,
в конце участка ( x 2 b ) Q F1 q1a F2 q2 b ;
M F1 ( a b) q1a ( a 2 b) F2 b q2 b 2 2 .
Участо к 3 : 0 x3 c .
Теперь рациональнее рассмотреть все силы справа от сечения.
Тогда
Q ( x3 ) R A ;
21
M ( x3 ) M A R A x3 .
Из этих выражений следует, что поперечная сила на третьем
участке – постоянная величина, а изгибающий момент меняется по
линейному закону и на границах участка имеет следующие значения:
в начале участка ( x3 0 ) M M A ,
в конце участка ( x3 c ) M M A R Ac .
Запишем результаты определения внутренних усилий в таблицу,
сосчитав численные значения Q и М на границах участков (табл. 1).
Таблица 1
Пределы
Выражения для Q и М
изменения
х на
участке
Участок 1 Q( x1 ) 20 15x1 ;
0 x1 2 M ( x ) 20x 7,5x 2
1
1
1
Участок 2 Q( x 2 ) 40 10x 2 ;
0 x 2 1 M ( x ) 10 40 x 5 x 2
2
2
2
Участок 3 Q( x 3 ) 30 ;
0 x 3 1 M ( x 3 ) 5 30 x 3
Граничные значения
Q, кН
М, кНм
в начале в конце в начале в конце
участка участка участка участка
20
– 10
0
10
– 40
– 30
– 30
10
– 25
5
35
– 30
Из таблицы видно, что поперечная сила на первом участке меняет свой знак, т. е. график Q пересекает нулевую линию. Это значит,
что изгибающий момент на этом участке имеет экстремум. Найдем
максимальное значение М на этом участке. Сначала определим то значение координаты х1, при котором поперечная сила равна нулю. Обозначим это значение координаты х0 (см. рис. 4.6).
Q ( x0 ) 20 15x0 0
х0 = 1,33 м.
Чтобы найти максимальное значение изгибающего момента,
подставим х0 в выражение для М на первом участке:
M max M ( x0 ) 20 1,33 7,5 1,332 13,3 кНм.
По результатам вычислений в таблице строим эпюры Q и М на
каждом участке (см. рис. 4.6, б). Не забываем после построения эпюр
22
проанализировать результаты по тем правилам проверки правильности построения эпюр, которые перечислены ранее.
Пример 2
Условие задачи
На балку кроме равномерно распределенной нагрузки действует
линейно распределенная (треугольная) нагрузка (рис. 4.7, а). Построим эпюры распределения поперечной силы и изгибающего момента,
обращая внимание на определение Q и М на участке с треугольной
нагрузкой.
Решение
Найдем опорные реакции. Балка имеет шарнирное опирание и
для определения двух не равных нулю опорных реакций RA и RB (горизонтальная реакция HA = 0) составим два независимых уравнения
статики. Рациональными уравнениями, в каждое из которых входит
одна неизвестная реакция, в данном случае являются:
a
b 2
m A 0 ; q1a q2 b Fb M RB (b c) 0 ,
2
2 3
a
b b
mB 0 ; q1a ( b c) q2 ( c) Fc M R A (b c) 0 .
2
2 3
Напомним как определяется момент от треугольной нагрузки.
Равнодействующая от треугольной нагрузки равна площади треугольника q2 b 2 и приложена в центре тяжести треугольника, поэтому
плечо этой равнодействующей относительно точки А равно (2 3) b , а
относительно точки В – (b 3) c . Из этих уравнений найдем RA = –
31,9 кН, RB = – 18,1 кН. Отрицательные знаки показывают, что обе реакции направлены не вверх, как показано на рис. 4.7, а, а в противоположную сторону. Для проверки опорных реакций составим уравнение равновесия "сумма проекций сил на вертикальную ось z равна нулю":
z 0 ; 10 1 40 4 2 20 31,9 18,1 80 80 0 .
Определение внутренних усилий производим, записывая выражения для Q и М в таблицу (табл. 2).
23
Поясним выражения для Q и М на втором участке, а именно третьи слагаемые в этих выражениях, учитывающие треугольную
нагрузку. Чтобы найти равнодействующую от треугольной нагрузки,
расположенной слева от рассматриваемого сечения на участке длиной
х2, определим интенсивность распределенной нагрузки в сечении х2,
которая на рис. 4.7, а обозначена q x . Для этого составим пропорцию:
40 x2
q x q2 x 2 b , откуда q x
. Тогда равнодействующая этой рас4
x
40 x 2 x 2
. Она
пределенной нагрузки на участке длиной х2 q x 2
2
4
2
приложена в центре тяжести треугольника, и изгибающий момент, соx
40 x22 x2
здаваемый этой нагрузкой, равен
, где 2 – плечо равнодей3
8
3
ствующей.
Таблица 2
Пределы
изменения х на
участке
Выражения для Q и М
Участок 1 Q( x1 ) 10x1 ;
0 x1 1 M ( x1 ) 10x1 x1 2
Участок 2
x2 x2
;
Q
(
x
)
10
31
,
9
40
2
0 x2 4
4 2
Граничные значения
Q, кН
М, кНм
в нав
в нав
чале конце чале конце
участка участка участка участка
0
– 10
0
–5
– 41,9 38,1
x 22 x 2
M ( x 2 ) 10( 0,5 x 2 ) 31,9 x 2 40
8 3
Участок 3 Q( x 3 ) 18,1 ;
0 x 3 2 M ( x 3 ) 30 18,1 x 3
–5
18,1
– 66,1
18,1
– 30 – 66,1
Поскольку поперечная сила на втором участке меняет знак, найдем
экстремальное значение изгибающего момента в сечении х0 на этом
участке (рис. 4.7, б). Определим величину х0, приравняв выражение
для поперечной силы на втором участке нулю:
24
40 x02
Q( x0 ) 41,9
0 , откуда х0 = 2,89 м. Тогда
8
40 2,893
M max M ( x2 x0 ) 10(0,5 2,89) 31,9 2,89
24
86,0 кН м
По полученным в таблице выражениям строим эпюры внутренних усилий. Напомним, что выпуклость эпюры М направлена в сторону распределенной нагрузки. Выпуклость эпюры Q на втором
а
x2
x1
F=20 кН
q1 = 10 кН/м
A
x3
M = 30 кНм
qx
B
RA = –31,9 кН
b=4 м
a=1 м
б
q2 = 40 кН/м
c=2 м
RB = –18,1 кН
38,1
18,1
Эпюра Q
10
41,9
x0=2,89 м
Mmax = 86,0
66,1
5
30
Эпюра M
Рис. 4.7. К решению примера 2 по построению эпюр Q и М:
а – схема балки с нагрузками;
б – эпюры поперечной силы и изгибающего момента
25
участке можно определить по знаку второй производной
d 2Q dx 2 dq dx . В данном случае функция q(x ) является убывающей, следовательно dq dx 0 , а d 2Q dx 2 0 . Это означает, что
эпюра Q имеет выпуклость вниз. Можно определить выпуклость
эпюры поперечной силы и по-другому. В сечении, где интенсивность
распределенной нагрузки равна нулю (начало второго участка в данной задаче), угол наклона касательной к кривой Q(x) должен равняться нулю, так как в этом сечении dQ dx 0 . Это возможно тогда, когда
функция Q(x) имеет выпуклость вниз.
После того, как Вы нарисовали эпюры, рекомендуем обязательно
проанализировать их по правилам проверки правильности построения
эпюр.
4.1.2. Проверка прочности балок при плоском поперечном
изгибе (задачи № 16–19)
Рекомендуемая литература:
Александров А. В., Потапов В. Д., Державин Б. П. Сопротивление материалов. М.: Высш. шк., 1995. Гл. 6 (§ 6.1–6.3), гл. 7 (§ 7.1, 7.2), гл. 4 (§ 4.1, 4.2).
Гастев В. А. Краткий курс сопротивления материалов. М.: Физматгиз,
1977. Гл. 5 (§ 23–24), гл. 15.
Дарков А. В., Шпиро Г. С. Сопротивление материалов. М.: Высш. шк.,
1989. Гл. 7 (§ 7.6–7.8, 7.10), гл. 5 (§ 5.1–5.5).
Если Вы научились строить эпюры Q и М, то можете приступать
к проверке прочности балок. Задача о проверке прочности балки чаще
всего сводится к решению двух вопросов:
*
подбору сечения балки, т. е. определению таких минимальных
размеров поперечного сечения, которые удовлетворяют условиям
прочности в опасных точках;
*
определению грузоподъемности балки, т. е. нахождению такой
максимальной нагрузки (допускаемой нагрузки) на балку, при которой удовлетворяются условия прочности во всех опасных точках.
Рассмотрим примеры проверки прочности балок круглого или
прямоугольного сечений, двутавровых балок и балок произвольного
моносимметричного сечения.
26
Пример 1
Условие задачи
На балку круглого поперечного сечения действует нагрузка, показанная на рис. 4.8, а. Требуется подобрать размеры поперечного сечения (или определить грузоподъемность балки) так, чтобы выполнялись условия прочности во всех опасных точках.
Решение
Строим эпюры Q и М (рис. 4.8, б). Эпюры Q и М нужны для того, чтобы найти положение опасных сечений и опасных точек в балке.
Найдем положение опасных сечений для этой балки. Опасными сечениями в балках круглого и прямоугольного сечений являются:
*
сечение, где действует максимальный по модулю изгибающий
момент (сечение а–а на рис. 4.8, в);
*
сечение, где действует наибольшая по абсолютной величине поперечная сила (сечение b–b на рис. 4.8, в).
В опасных сечениях находятся опасные точки – точки, в которых действуют либо максимальные нормальные, либо максимальные
касательные напряжения. Чтобы найти положение опасных точек, посмотрим на эпюры распределения нормальных и касательных
напряжений по высоте балки, которые построены на рис. 4.8, в. Из
эпюры видно, что наибольшие нормальные напряжения действуют в
точках, наиболее удаленных от нейтральной оси y. Таким образом,
опасными точками с максимальными нормальными напряжениями
являются точки 1, 1, расположенные в сечении а–а (рис. 4.8, в). В одной точке действуют максимальные растягивающие напряжения, в
другой – максимальные сжимающие. В данной задаче в сечении а–а
максимальный момент положителен, т. е. он изгибает балку выпуклостью вниз, поэтому в точке 1 действуют растягивающие, а в точке 1 –
сжимающие напряжения. Если допускаемые напряжения при растяжении и сжатии материала балки одинаковы (дерево или пластичный
материал), то обе точки являются равноопасными. Опасная точка с
максимальными касательными напряжениями, как видно из эпюры ,
27
расположена на оси балки в сечении b–b, где действует наибольшая
поперечная сила (точка 2 на рис. 4.8, в).
а
q1=15 кН/м
М= 60 кНм МА=5 кНм
F2=30 кН
А
F1=20 кН
a=2 м
б
20
q2=10 кН/м
b=1 м
c=1 м
RA=30 кН
Эпюра Q
10
x0=1,33 м
30
40
25
Mmax=13,3
кНм
Эпюра М
5
10
35
в
b
2
b
a
1
1
a
y
z
Эп. Эп.
Рис. 4.8. К решению примера 1 о проверке прочности балки:
а – схема балки с нагрузками; б – эпюры внутренних усилий;
в – опасные сечения и опасные точки
Запишем условия прочности в опасных точках. Начнем с рассмотрения опасных точек 1, 1, так как именно эти точки чаще всего
бывают наиболее опасными. Эти точки находятся в линейном напря-
28
женном состоянии (рис. 4.9, а) и условие прочности в этих точках записывается так же, как при растяжении-сжатии:
max [] ,
где максимальные напряжеa
max
б
ния определяем по формуле
1
max
(4.3). Тогда условие прочности
2
в точках 1, 1 будет иметь вид
max
M max
[ ] .
1
Wy
Если стоит з адача п одРис. 4.9. Напряженное состояние опасных
бо р а сечени я , то из этого
точек
условия находим требуемый
момент сопротивления балки:
M
W yнеобх max ,
[ ]
а, зная момент сопротивления, по формулам (4.5) определяем размеры
поперечного сечения балки. Например, для балки круглого поперечного сечения необходимый радиус r 3 4W yнеобх . Для деревянных
балок диаметр ходовых бревен ограничен и не должен быть больше
26 см. Для бревна с радиусом 13 см момент сопротивления равен 1725
см3 . Если полученное из условия прочности значение необходимого
момента сопротивления будет больше 1725 см3, то следует подобрать
сечение из нескольких бревен. В рассматриваемом примере для дере-
3500 см3. Товянной балки с [] = 10 МПа = 1кН/см2 найдем Wy
гда количество бревен 3500/1725 = 2,1 3 (Округляем всегда в большую сторону). Момент сопротивления одного из трех бревен
W y 3500 / 3 1167 см3 и
радиус
каждого
бревна
будет
необх
r 3 4 1167 / = 11,4 12 см. Заметим, что полученный результат
(сечение из трех бревен с радиусом 12 см) справедливо, если все
бревна располагать горизонтально, перпендикулярно плоскости изгиба.
29
Если требуется определить грузо п одъемно сть балки, то из
условия прочности в точках 1, 1 находим максимальное значение изгибающего момента:
M max W y [] ,
которое зависит от нагрузки. Зная эту зависимость из эпюры М,
найдем значение допускаемой нагрузки.
Решение задачи будет закончено только тогда, когда мы убедимся, что полученный размер поперечного сечения балки (или найденная допускаемая нагрузка) удовлетворяют условию прочности во второй опасной точке. Поскольку в точке 2 действуют только касательные напряжения (нормальные напряжения в точках, лежащих на оси
балки, равны нулю – это видно из эпюры на рис 4.8, в), то напряженное состояние этой точки – чистый сдвиг (рис. 4.9, б). Если неизвестно опытное значение допускаемого касательного напряжения, то
условие прочности при чистом сдвиге записывается по соответствующей материалу балки теории прочности. Например, для пластичного
материала из формул (4.9), (4.10) для чистого сдвига можно записать
такие условия прочности для точки 2:
max [] – по третьей теории и
2
– по четвертой теории прочности.
max []
3
Для деревянной балки, а дерево – анизотропный материал, теории прочности, полученные для изотропных материалов, не справедливы. В этом случае для проверки прочности необходимо знать допускаемое значение касательного напряжения [], полученное на основании опытных данных. Тогда для деревянной балки условие прочности в точке 2 записывается так:
max [] .
Здесь максимальное касательное напряжение max определяем в зависимости от формы поперечного сечения по формулам (4.6). Например,
для рассматриваемой балки с подобранным сечением из трех бревен
радиусом 12 см
30
max
4 40
0,039 кН/см2,
3 3 12
что меньше [] = 2 МПа = 0,2 кН/см2.
Если условие прочности в точке 2 выполняться не будет, то
необходимо подобрать сечение или найти грузоподъемность балки из
условия прочности в этой точке.
2
Пример 2
Условие задачи
Стальная прокатная двутавровая балка загружена нагрузками,
показанными на рис. 4.10, а. Подберем номер двутавра так, чтобы выполнялись условия прочности во всех опасных точках.
Решение
Строим эпюры Q и М. По построенным эпюрам Q и М
(рис. 4.10, б) найдем положение опасных точек в двутавровой балке.
Сначала покажем на фасаде балки опасные сечения. Кроме опасных
сечений, где действуют максимальный изгибающий момент (сечение
а–а на рис. 4.10, в) и наибольшая поперечная сила (сечение b–b на
рис. 4.10, в), в двутавровой балке существует еще одно опасное сечение – это сечение, где Q и М одновременно имеют большие значения.
В рассматриваемом примере это сечение с–с на рис. 4.10, в. В опасных сечениях находятся опасные точки. В сечении а–а – точки 1, 1 с
максимальными нормальными напряжениями, в сечении b–b – точка
2, в которой действует наибольшее касательное напряжение. Особенностью проверки прочности двутавровой балки является появление
новых по сравнению с балками круглого и прямоугольного сечений
опасных точек. Это связано с особенностью эпюры распределения касательных напряжений по высоте двутавра. Точки 3, 3, находящиеся в
сечении с–с и расположенные в крайних точках стенки на сопряжении
с полкой (рис. 4.10, в), опасны, так как в них одновременно действуют большие нормальные и большие касательные напряжения.
Подберем размер двутавра (номер двутавра) из условия прочности в точках 1, 1 – именно эти точки являются, как правило, наиболее
31
опасными, а затем проверим прочность в остальных опасных точках.
Точки
1, 1 находятся в линейном напряженном состоянии
(рис. 4.9, а) и условие прочности в этих точках имеет вид
M max
[ ] .
Wy
Отсюда определяем необходимый момент сопротивления
W yнеобх . По таблице сортамента прокатной стали (например, в [1])
подбираем номер двутавра, у которого момент сопротивления W y
имеет близкое к W yнеобх значение. (Обратите внимание, что в таблице
а
M = 30 кНм
q1 = 10 кН/м
A
F = 20 кН
B
q2=40 кН/м
RA = –31,9 кН
b=4 м
a=1 м
c=2 м
б
RB = – 18,1 кН
38,1
18,1
Эпюра Q
10
x0=2,90
41,9
Mmax = 86,0
66,1
30
5
в
Эпюра M
b
2
b
a
1
1
a
c
3
3
c
y
z
Эп.
Эп.
Рис. 4.10. К решению примера 2 о проверке прочности двутавровой балки:
а – схема балки с нагрузками; б – эпюры внутренних усилий;
в – опасные сечения и опасные точки
32
сортамента – другое обозначение осей и принятому нами обозначению W y там соответствует W x ). Для балки, изображенной на
рис. 4.10, выполненной из стали с допускаемым напряжением
160 МПа,
8600
537,5 см3,
16
и в соответствии с ГОСТ 9239–89 подбираем двутавр № 33, у которого W y 597 см3.
W yнеобх
После того, как найден номер двутавра, необходимо убедиться,
что выполняются условия прочности в остальных опасных точках.
Точка 2, в которой нормальные напряжения равны нулю, а касательные – максимальны, находится в напряженном состоянии "чистый
сдвиг" и условие прочности в ней записывается по теории прочности,
справедливой для пластичных материалов (4.9) или (4.10). Максимальные касательные напряжения находим по формуле Журавского
(4.2). Рассмотрим подробно как находить статический момент отсеченной части S оy ( z ) , входящий в формулу Журавского. Статический
момент отсеченной части зависит от того, где находится точка, в которой определяется касательное напряжение. Чтобы найти отсеченную
часть, надо мысленно
разрезать
а
б
поперечное сечение
через точку, в котоs
3
рой ищем , пер
s
h
h
пендикулярно
y
2
y
направлению касательного напряжеt
t
ния. Любая из "отz
z
резанных" частей
b
b
может
считаться
отсеченной.
Для
Рис. 4.11. Отсеченные части сечения:
точки 2 отсеченная
а – для точки 2;
часть сечения покаб – для точки 3
33
зана на рис. 4.11, а (заштрихованная часть) – это половина сечения.
Для простых фигур (прямоугольник, круг), положение центра тяжести
которых известно, статический момент находится по формуле
S y A zц т ,
где А – площадь фигуры; zц т – координата центра тяжести (при вычислении статического момента отсеченной части знак координаты не
учитывается, в этом случае zц т – это расстояние от центра тяжести
отсеченной части до оси y). Для вычисления статического момента
отсеченной части, показанной на рис. 4.11, а , разобьем ее на два прямоугольника: полку и половину стенки. Для каждого прямоугольника
находим площадь и расстояние от центра тяжести до оси y. Тогда
h t
h
1 h
S оy bt ( ) ( t ) s ( t ) .
2 2
2
2 2
В этой формуле первое слагаемое – статический момент полки, а
второе – статический момент половины стенки. Заметим, что для
стандартных двутавров статический момент половины сечения задан
в сортаменте (обозначен S x ) и для найденного двутавра № 33
S оy 339 см3. В формуле Журавского (4.2) для точки 2 b( z ) s – тол-
щина стенки двутавра, I y – осевой момент инерции находим по таблице сортамента прокатных двутавров (обозначен I x ) . Подставляя
данные для двутавра № 33, получим
41,9 339
max
2,06 кН/см2.
9840 0,7
Сравнивая максимальное касательное напряжение согласно третьей теории прочности с [] 2 8 кН/см2 , убеждаемся, что условие
прочности в точке 2 выполняется.
Проверим прочность в точках 3, 3, которые находятся в "балочном" напряженном состоянии (см. рис. 4.4). Найдем напряжения, действующие в точке 3. Нормальное напряжение ищем по формуле (4.1).
Координата точки 3 z (h 2 t ) и
6610 ( 16,5 1,12)
10,3 кН/см2.
9840
34
Положительный знак полученного напряжения показывает, что в
точке 3, расположенной выше нейтральной оси, действует растягивающее напряжение. Для определения касательного напряжения по
формуле Журавского получим сначала статический момент отсеченной части. Отсеченной частью сечения для точки 3 будет полка (см.
рис. 4.11, б) и
S оy 14 1,12 (16,5 1,12 2) 250 см3.
Так как точка 3 находится в стенке двутавра, то b( z) s 0,7 см.
Тогда касательное напряжение в точке 3
38,1 250
1,38 кН/см2.
9840 0,7
Подставляя найденные значения и в условие прочности по
третьей теории (4.9), убеждаемся в том, что оно удовлетворяется:
10,32 4 1,382 10,7 < 16 кН/см2.
На этом процесс подбора двутавра заканчивается.
Примечание. В условии задачи № 17 есть пункты 7 и 8 [4].в которых требуется исследовать напряженное состояние произвольной точки двутавра. (Выполнение этой части задачи необязательны для студентов заочной формы обучения, студенты дневной и вечерней форм обучения могут выполнять эти пункты по требованию преподавателя) Эта часть задачи не имеет отношения к проверке прочности двутавра, носит академический характер и необходима для
лучшего освоения теории изгиба. После того, как Вы выбрали произвольную
точку, расположенную в сечении, где и Q, и М не равны нулю, найдите нормальное и касательное напряжения в этой точке по формулам (4.1), (4.2), используя те навыки, которые Вы приобрели при определении напряжений в
опасных точках. Выделите вокруг исследуемой точки элементарный параллелепипед (элемент) и покажите на рисунке действующие на гранях элемента
напряжения с учетом их знаков. Дальше определите главные напряжения и положение главных площадок, применяя знания, полученные при изучении разд.
2 "Исследование плоского напряженного состояния" в [5]. Поверните на рисунке элемент по главным направлениям и покажите на его гранях главные напряжения.
35
Пример 3
Условие задачи
На балку моносимметричного сечения, выполненную из чугуна,
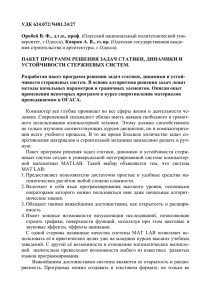
действует нагрузка, показанная на рис. 4.12, а. Поперечное сечение
балки изображает рис. 4.13. Надо найти грузоподъемность балки, т. е.
значение допускаемой нагрузки, при которой обеспечена прочность
балки.
Решение
Найдем геометрические характеристики заданного поперечного
a
q
l
F=ql/4
б
ql/4
Эпюра Q
3ql/4
ql2/4
ql2/32
в
Эпюра M
4
1 a
3
2
b
1 a
b
y
z
Эп.
Эп.
Рис. 4.12. К решению примера 3 о проверке прочности балки:
а – схема балки с нагрузками;
б – эпюры поперечной силы и изгибающего момента;
в – опасные сечения и опасные точки
36
сечения: осевые моменты инерции относительно главных центральных осей. Сечение имеет только одну ось симметрии, эта ось является
одной из главных осей инерции. Обозначим ее z. Вторая главная ось y
проходит через центр тяжести сечения. Определим положение центра
тяжести сечения по формуле
S
zц т a .
A
Статический момент S a определяем относительно произвольной оси а–а, перпендикулярной оси z (оси симметрии), как сумму статических моментов фигур, составляющих заданное поперечное сечение. В данном случае сечение разбиваем на три прямоугольника и
площадь сечения состоит из площадей трех фигур: двух стенок Ас
y0
t/2
и полки Ап: A 2 Ac Aп . Ось а–а
a
t a
p
zц т=h2 z max
рационально расположить так,
y
чтобы статический момент одной
h1
h
из фигур равнялся нулю. Это проy0
zсmax
h-t
изойдет, если ось а–а провести
2
через центр тяжести какой-то фиz
гуры, например, через центр тяжести полки (см. рис. 4.13). Тогда
b
статический момент полки равен
нулю и полный статический моРис. 4.13. Поперечное сечение
мент Sa равен удвоенному статибалки
ческому моменту стенки:
ht t
S a 2( h t ) (
).
2
2
Здесь первый множитель – удвоенная площадь стенки, второй – координата центра тяжести стенки5.
Найдя положение центра тяжести сечения, проведем через него вторую главную ось y (см. рис. 4.13). Рекомендуем рисовать сечение в масштабе, тогда по масштабу можно проконтролировать праПри вычислении статического момента не забывайте учитывать знаки
координат центра тяжести.
5
37
вильность определения центра тяжести сечения. В данном случае
очевидно, что центр тяжести должен быть смещен к полке.
Теперь определим осевой момент инерции относительно оси y.
Находим его как сумму моментов инерции трех фигур: двух стенок
( I c ) и полки ( I п ). Для определения момента инерции каждой фигуры
используем формулу
I y I y0 A a 2 .
Здесь I y 0 – момент инерции фигуры относительно оси y0, проходящей через центр тяжести фигуры и параллельной оси y, а – расстояние между осями y и y0. Таким образом,
I y 2( I сy 0 Aс h12 ) I пy 0 Aп h22 .
Расстояния h1 и h2 показаны на рис. 4.13. Моменты инерции
полки и стенки относительно собственных осей y0 находим по формуле, справедливой для прямоугольника (4.4),
bh 3
,
I y0
12
где b – ширина прямоугольника (параллельна оси y0); h – его высота.
Например, для полки
bt 3
п
.
I y0
12
Примечание. Рекомендуем для тренировки аналогично найти
момент инерции поперечного сечения относительно оси z, несмотря
на то, что в проверке прочности этой балки он не участвует.
Строим эпюры поперечной силы и изгибающего момента, выражая ординаты через неизвестный параметр нагрузки (в данной задаче
через q – см. рис. 4.12, б).
Прежде чем находить положение опасных сечений и опасных
точек по эпюрам Q и М, выясним как рационально расположить поперечное сечение балки: полкой вверх или полкой вниз. Поскольку чугун – хрупкий материал и прочность при растяжении у него меньше
прочности при сжатии, оптимальным положением сечения является
такое положение, при котором максимальные растягивающие напряжения будут меньше максимальных по модулю сжимающих напряже-
38
ний. В рассматриваемом примере максимальный изгибающий момент
отрицателен, то есть балка в сечении, где действует M max , изгибается
выпуклостью вверх и растягивающие напряжения будут в верхних волокнах. Поэтому располагаем поперечное сечение так, чтобы центр
тяжести сечения был ближе к верхним волокнам, т. е. полкой вверх.
Найдем положение опасных сечений и опасных точек так же, как
в двутавровой балке (см. рис. 4.12, в). Поскольку максимальная поперечная сила и наибольший изгибающий момент действуют в данном
примере в одном сечении, то опасные точки 1, 1, 2 и 3 расположены
в одном сечении а–а. Особенностью расчета балок из хрупкого материала является то обстоятельство, что точки 1 и 1 не являются равноопасными. Так как хрупкий материал имеет разную прочность при
растяжении и сжатии, то проверять прочность надо как в точке 1, в
которой действуют максимальные растягивающие напряжения, так и
в точке 1 с наибольшими сжимающими напряжениями. Если эпюра
изгибающих моментов меняет свой знак, как в рассматриваемом примере, то появляется еще одна опасная точка – точка 4 (см. рис. 4.12, в).
В этой точке действуют растягивающие напряжения, и поскольку она
расположена дальше от нейтральной оси, чем точка 1, величина растягивающего напряжения в точке 4 может оказаться больше, чем в
точке 1 несмотря на то, что изгибающий момент в сечении b–b меньше, чем в сечении а–а.
Определим допускаемую нагрузку из условия прочности в точке
1, где действуют максимальные растягивающие напряжения:
M
рmax max []р ,
Wр
откуда
M max Wр []р .
Здесь Wр
Iy
р
z max
р
– момент сопротивления растяжению; z max
– рас-
стояние до наиболее растянутого волокна показано на рис. 4.13. Для
рассматриваемого примера ql 2 / 4 Wр []р и q 4 Wр []р / l 2 .
39
Проверим прочность в остальных опасных точках, используя
найденное значение допускаемой нагрузки. В точке 1 с наибольшими
сжимающими напряжениями
M
cmax max []c ,
Wc
Iy
c
где Wс
– момент сопротивления сжатию. (Расстояние z max
с
z max
показано на рис. 4.13.)
Для рассматриваемого примера опасной является и точка 4.
Условие прочности в этой точке:
M b b z ( 4) M b b
( 4)
[ ] р .
Iy
Wc
Чтобы проверить прочность в точке 2 с максимальными касательными напряжениями, находящейся в напряженном состоянии
"чистый сдвиг", необходимо применить теорию прочности, справедливую для хрупкого материала. Например, из теории Мора (4.8) для
чистого сдвига получим следующее условие прочности:
[ ] р
max
,
1+ k
где максимальное касательное напряжение max определяем по формуле Журавского (4.2), в которой статический момент S оy находим для
отсеченной части, расположенной по одну (любую) сторону от
нейтральной оси.
Наконец, условие прочности в точке 3, где действуют и нормальные (растягивающие), и касательные напряжения, записываем по
теории прочности для "балочного" напряженного состояния, справедливой для хрупкого материала, например по теории Мора (4.8). Нормальные и касательные напряжения в этой точке определяем по формулам (4.1) и (4.2).
Если в какой-то точке условие прочности не будет выполняться,
необходимо найти новое значение допускаемой нагрузки из условия
прочности в этой точке.
40
Примечание; В рассматриваемой задаче, кроме условия прочности, должно выполняться и условие жесткости, т. е. максимальный
прогиб не должен превосходить значения допускаемого прогиба. Эта
часть задачи является необязательной. Вопрос о нахождении прогибов решается в следующем разделе "Определение перемещений и
проверка жесткости балок".
4.1.3. Определение перемещений и проверка жесткости
балок (задачи № 19, 20)
Рекомендуемая литература
Александров А. В., Потапов В. Д., Державин Б. П. Сопротивление материалов. М.: Высш. шк., 1995. Гл. 8 (§ 8.1–8.5, 8.9).
Гастев В. А. Краткий курс сопротивления материалов. М.: Физматгиз,
1977. Гл. 5 (§ 25), гл. 8.
Дарков А. В., Шпиро Г. С. Сопротивление материалов. М.: Высш. шк.,
1989. Гл. 7 (§ 7.13–7.14), гл. 11 (§ 11.4, 11.5).
Основные определения
Под действием нагрузки происходит деформация балки: ось балки искривляется, точки оси балки перемещаются по вертикали6, сечения балки, оставаясь после деформации перпендикулярными изогнутой оси, поворачиваются. Вертикальное перемещение произвольной
точки оси балки, то есть перемещение вдоль оси z , будем называть
прогибом и обозначать w(х). Угол поворота произвольного сечения
обозначим (х). Очевидно, что угол поворота произвольного сечения
равен углу поворота оси балки в сечении x . Прогибы и углы поворота
трех балок показаны на рис. 4.14. Известно, что функции w(х) и (х)
связаны между собой такой зависимостью:
dw
( x )
w( x ) .
(4.14)
dx
При проектировании конструкций часто ограничивают не только
напряжения (требуется удовлетворить условию прочности), но и деформации (требуется обеспечить выполнение условия жесткости).
Перемещения точек оси по горизонтали гораздо меньше вертикальных
перемещений и ими будем пренебрегать.
6
41
Для балок условием жесткости является условие, ограничивающее
максимальный прогиб, т. е.
wmax [ w] ,
(4.15)
где [w] – допускаемый прогиб, который задается в долях от длины
пролета балки l и в зависимости от типа проектируемой конструкции
может находиться в пределах от l 100 до l 1000 .
Рассмотрим два наиболее часто используемых способа определения перемещений балок (прогибов и углов поворота): способ, основанный на интегрировании приближенного дифференциального уравa
х
A
w(x)
(x)
l
z
б
(x)
x
0
A
B
w(x)
(x)
l
z
x
в
w(x)
A
w0
B
(x)
0
a
l
a
z
Рис. 4.14. Деформации балок при изгибе
wmax
42
нения изогнутой оси балки, называемый аналитическим способом, и
метод Максвелла – Мора.
Аналитический способ определения перемещений
Аналитический способ основан на интегрировании приближенного дифференциального уравнения изогнутой оси балки
(4.16)
EIw( x) M ( x) .
Здесь EI – жесткость балки при изгибе, то есть произведение модуля
упругости на момент инерции. Предполагается, что эта величина не
меняется по длине балки; M (x) – изгибающий момент в произвольном сечении балки.
Интегрируя уравнение (4.16), мы получим умноженные на жесткость угол поворота произвольного сечения
EIw( x ) M ( x )dx C
(4.17)
и прогиб произвольного сечения
EIw( x ) M ( x )dxdx Cx D .
(4.18)
В формулах (4.17), (4.18) С и D – произвольные постоянные, которые находятся из граничных условий, зависящих от условий закрепления балки. Для каждой статически определимой балки можно
записать два граничных условия для определения двух
<0
w<0
произвольных постоянных.
w>0
x
Введем правило знаков
для прогиба и угла поворота
в аналитическом методе опре>0
z
деления
перемещений.
Рис. 4.15. Правило знаков для перемещений
Рис. 4.15 поясняет это правив аналитическом методе
ло знаков. Согласно этому
правилу прогиб вниз (по
направлению оси z) считается
положительным. Знак угла поворота зависит от того, где находится
начало отсчета х. Если начало отсчета х находится слева, как показано
43
на рис 4.15, поворот сечения по часовой стрелке считается положительным7.
Если балка имеет n участков, то функция изгибающего момента M (x) на каждом участке своя. В этом случае надо интегрировать n
дифференциальных уравнений и определять 2 n произвольных постоянных, что очень громоздко. Если использовать специальные правила
записи и интегрирования дифференциального уравнения, которые
называются правилами Клебша, то число произвольных постоянных
можно свести к двум, независимо от количества участков в балке. Перечислим эти правила:
1. Начало координат для всех участков должно быть единым и
находиться на конце балки (левом или правом) (рис. 4.16).
2. При составлении выражения для изгибающего момента на
каждом участке рассматриваем всегда все силы с той стороны от сечения, где находится начало координат.
3. Если на балку действует распределенная нагрузка, которая обрывается в каком-то сечении балки, то ее следует продолжить до конца балки и приложить на участке, где добавлена нагрузка, распределенную нагрузку той же интенсивности, но противоположного знака
(см. рис. 4.16). (Конец балки всегда противоположен выбранному
началу координат.)
4. Если к балке приложена сосредоточенная пара сил M 0 , то в
выражение для изгибающего момента она входит с множителем
( x a ) 0 , где а – расстояние от начала координат до места приложения
пары сил (см. рис. 4.16).
Вспомнив, что w ( x ) , можно сказать, что угол поворота положителен, если функция w ( x ) является возрастающей на рассматриваемом участке.
Такая формулировка правила знаков для угла поворота не зависит от того, где
находится начало отсчета x (слева или справа).
7
44
5. Интегрирование ведется без раскрытия скобок, то есть
( x a ) k 1
k
.
( x a ) dx
k 1
x
Примечание. Правиx
F
ла Клебша справедливы,
q
если функция q(x ) , опиx
M0
В
А
сывающая распределенa
RA
RB ную нагрузку, является
линейной (в частном слуb
чае постоянной величиl
ной).
При использовании
Рис. 4.16. Иллюстрация некоторых правил
правил Клебша изгибаюКлебша
щий момент на каждом
последующем участке равен моменту на предыдущем участке плюс некоторая добавка, поэтому выражение для изгибающего момента принято для всех участков
записывать в одну строку, отделяя участки чертой. Например, выражение для изгибающего момента в балке, показанной на рис. 4.16, с
учетом правил Клебша будет выглядеть следующим образом:
2
q( x b) 2
0 q( x a )
.
M ( x) R A x I M 0 ( x a)
F ( x b)
2
2
II
III
Такая запись означает, что выражение для изгибающего момента
на первом участке ( 0 x a ) содержит одно слагаемое, функция изгибающего момента на втором участке ( a x b ) имеет уже три слагаемых и, наконец, в выражение для изгибающего момента на третьем
участке ( b x l ) входят все пять слагаемых. Римская цифра в низу
разделяющей черты показывает номер участка. В общем случае все
члены, находящиеся левее черты с номером участка, входят в выражение для момента на указанном участке. Подставляя выражение для изгибающего момента в дифференциальное уравнение (4.16) и интегрируя его, найдем прогиб и угол поворота произвольного сечения. Две
произвольные постоянные, возникающие при интегрировании, находим из граничных условий.
45
Приведем примеры записи граничных условий для разных балок. В балке, изображенной на рис. 4.16, на левом и правом ее концах
находятся шарнирные опоры, которые запрещают вертикальные перемещения. Поэтому прогибы в точках A и B равны нулю и граничные условия для этой балки (так же, как и для балки на рис 4.14, б)
будут такими:
w A w( x 0) 0 ;
wB w( x l ) 0 .
Сечение А балки на рис. 4.14, а, в котором расположено жесткое
защемление, не может ни перемещаться по вертикали, ни поворачиваться, поэтому граничные условия для этой балки
w A w( x 0) 0 ;
A w( x 0) 0 .
Для консольной балки, показанной на рис. 4.14, в, следует записать такие граничные условия:
w A w( x a ) 0 ;
wB w( x a l ) 0 .
Можно показать, что для балки с произвольным числом участков
при использовании правил Клебша произвольные постоянные C и D
имеют следующий геометрический смысл:
C EIw0 EI 0 ;
(4.19)
D EIw0 ,
(4.20)
где w0 и w0 0 соответственно прогиб и угол поворота балки в
начале координат. Знание геометрического смысла постоянных С и D
позволяет рационально выбирать начало отсчета х и анализировать
результаты. Например, при выборе начала отсчета координаты х следует помещать начало координат в тот конец балки, где есть какоенибудь закрепление. Так, в балке на рис. 4.14, а, где начало координат
помещено в точку А с жестким защемлением, следует ожидать, что
произвольные постоянные С и D будут равны нулю, так как в точке А
не возможны никакие перемещения ( 0 w0 0 ). У балки, показанной на рис. 4.14, б, начало отсчета х находится в шарнирной опоре,
поэтому произвольная постоянная D будет равна нулю ( w0 0 ), а так
как сечение в шарнире А поворачивается по часовой стрелке, то сле-
46
дует ожидать, что постоянная С будет положительна. Наконец, согласно рис. 4.14, в точка оси, расположенная в начале координат перемещается вниз, а сечение в начале отсчета х поворачивается против
часовой стрелки, поэтому в соответствии с геометрическим смыслом
произвольных постоянных в данной балке должно получиться, что С
0, а D 0.
Метод Максвелла – Мора определения перемещений
Метод Максвелла – Мора определения перемещений является
универсальным методом, справедливым, в отличие от рассмотренного
выше аналитического способа, не только для балок, но и для любых
стержневых систем. Чтобы понять сущность метода Максвелла – Мора, введем понятия обобщенной силы и обобщенного перемещения
[2]. Обобщенной силой называется любое однопараметрическое силовое воздействие: это может быть и сосредоточенная сила, и сосредоточенный момент, и распределенная нагрузка, и группа сил, связанных между собой. Обобщенным перемещением, соответствующим
заданной обобщенной силе, называется
то перемещение, на котором обобщен- а
F–о.с.
ная сила совершает работу. Приведем
A
w-о.п.
два самых важных для практики примера. Если обобщенной силой (о.с.) явля- б
М–о.с.
ется вертикальная сосредоточенная сиB
ла, приложенная в точке А балки, то соответствующим этой силе обобщенным
-о.п.
перемещением (о.п.) является перемеРис. 4.17. Два варианта
щение по направлению этой силы, то
обобщенных сил
есть прогиб в точке А (рис. 4.17, а), так
и соответствующих им
как именно на таком перемещении сила обобщенных перемещений
F совершает работу. Если обобщенной
силой является сосредоточенная пара сил, приложенная в точке В, то
обобщенным перемещением, соответствующим этой обобщенной силе, будет угол поворота в сечении В (рис. 4.17, б).
Запишем приближенную формулу Максвелла – Мора, которая
используется для определения перемещений в изгибаемых плоских
47
стержневых системах и не учитывает влияния на перемещения продольной и поперечной сил:
M Mi
i
dx .
(4.21)
EI
В этой формуле i – искомое обобщенное перемещение (это может быть и прогиб, и угол поворота любого сечения); М – изгибающий момент от заданной нагрузки; Мi – изгибающий момент, вызванный единичной обобщенной силой, соответствующей искомому перемещению; EI – жесткость стержня при изгибе (произведение модуля
упругости на момент инерции). Интегрирование в формуле Максвелла
– Мора ведется по длинам всех стержней конструкции (по длинам
всех участков балки).
Таким образом, чтобы воспользоваться формулой Максвелла –
Мора, надо:
1) определить изгибающий момент на каждом участке от заданной нагрузки;
2) освободить конструкцию от заданной нагрузки и загрузить ее
единичной обобщенной силой, соответствующей искомому перемещению, то есть:
если мы хотим определить вертикальное перемещение какой-то точки, то в этой точке следует приложить сосредоточенную силу, положить ее равной единице и найти изгибающий момент, вызванный действием только этой силы;
если требуется найти угол поворота какого-то сечения, то в
этом сечении надо приложить сосредоточенную пару, равную единице, и найти изгибающий момент от этой пары;
3) подставить произведение изгибающих моментов от нагрузки и
от единичной обобщенной силы в интеграл (4.21) и проинтегрировать
по всей длине конструкции.
Введем правило знаков в методе Максвелла – Мора: полученный
по формуле Максвелла – Мора положительный знак перемещения показывает, что искомое перемещение происходит по направлению, совпадающему с принятым направлением единичной обобщенной силы,
отрицательный знак перемещения говорит о том, что точки оси пере-
48
мещаются (сечения поворачиваются) в сторону, противоположную
направлению единичной обобщенной силы.
Очень распространенным способом интегрирования формулы
Максвелла – Мора является способ графического интегрирования,
называемый правилом Верещагина. Для того, чтобы воспользоваться
правилом Верещагина, надо построить графики функций М и M i ,
входящих в подынтегральное выражение формулы Максвелла – Мора.
Такими графиками являются эпюры М и M i . Операция интегрирования формулы Максвелла – Мора с помощью правила Верещагина носит название "перемножение эпюр". Правило Верещагина состоит в
следующем:
1. Разбиваем эпюру М на простые фигуры, для которых известно
положение центра тяжести (прямоугольники, треугольники и т. п.)8.
2. Находим площади этих фигур k . При определении площадей
учитываем знаки ординат.
3. Под центрами тяжести этих фигур находим ординаты k на
эпюре M i (с учетом знаков).
4. Искомый интеграл будет равен (при постоянной жесткости
балки EI const ) сумме произведений площадей k на соответствующие им ординаты под центрами тяжести k , то есть
1
1 n
(4.22)
i
k k ,
M M i dx
EI
EI k 1
где n – количество фигур, на которые разбита эпюра М.
Примечание. Та эпюра (чаще всего M i ), на которой ищем ординату под центром тяжести, должна быть обязательно линейна на всем
участке перемножения.
Если обе перемножаемые эпюры линейны, то безразлично, какую эпюру
разбивать на простые фигуры – М или Мi.
8
49
В заключение приведем некоторые формулы, которые удобно
использовать при перемножении эпюр. Если на участке балки действует равномерно распределенная нагрузка, то, как известно, эпюра
изгибающих моментов на этом участке является квадратной параболой. Площадь сегмента, ограниченного квадратной параболой и показанного на рис. 4.18, а, вычисляется по формуле
ql 3
,
(4.23)
12
а центр тяжести этой фигуры находится посередине, независимо от
а
б
q
Эпюра М
a
l
Эпюра М
b
l
Ц.т.
l/2
ql 3
12
c
Эпюра Мi
d
l
2ac 2bd ad bc
6
Квадратная
парабола
Рис. 4.18. Некоторые полезные формулы для перемножения эпюр
угла наклона секущей. Если обе перемножаемые эпюры линейны и
представляют собой трапеции (рис. 4.18, б), то, чтобы не разбивать
эти трапеции на треугольники и прямоугольники, удобно воспользоваться формулой перемножения трапеций
l
2ac 2bd ad bc ,
(4.24)
6
где ординаты a, b, c и d на эпюрах М и Мi показаны на рис. 4.18, б (берутся с учетом знаков); l – длина перемножаемого участка эпюр.
50
a
b
M1
M(x)
M0
x
Эпюра М
M2
Mi1 Эпюра М
i
Mi2
Mi0
l/2
l/2
Вторым способом графического
интегрирования формулы Максвелла –
Мора является способ, использующий
формулу Симпсона. Эта формула получена из известной в математике формулы Симпсона приближенного интегрирования путем деления участка интегрирования на два отрезка. Если
подынтегральные функции М и Мi –
линейные или квадратные параболы, то
формула Симпсона дает точное значение интеграла. Приведем эту формулу,
применяемую для перемножения эпюр,
Рис. 4.19. Пояснения к формуле
Симпсона
b
l
(4.25)
6
a
В написанной формуле l b a – длина участка интегрирования;
M 0 , M i 0 и M 2 , M i 2 – значения крайних ординат на эпюрах М и Мi;
M 1 , M i1 – ординаты на эпюрах М и Мi, вычисленные в середине участка пере-
M M i dx M 0 M i 0 4 M 1M i1 M 2 M i 2 .
множения (рис. 4.19).
Примеры решения задач
Определение перемещений в балках аналитическим способом
Пример 1
Условие задачи
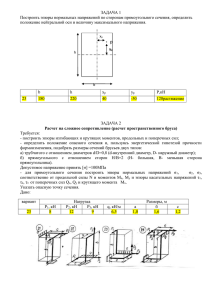
Для балки, показанной на рис. 4.20, а, требуется найти прогиб в
сечении С, угол поворота в сечении В аналитическим способом и
проверить условие жесткости, если допускаемый прогиб равен l/100.
Балка выполнена из дерева и имеет поперечное сечение из трех бревен радиусом 12 см. (Подбор сечения этой балки см. в разд. 4.1.2,
пример 1.)
51
Решение
Для определения перемещений балки аналитическим способом
составим дифференциальное уравнение изогнутой оси (4.16), используя правила Клебша записи выражения для изгибающего момента.
Начало координат в рассматриваемой задаче рациональнее выбрать
справа (в заделке). Распределенную нагрузку q2 , которая не доходит
до левого конца балки, продлим до сечения С (рис. 4.20, в). Выражение для изгибающего момента будет иметь такой вид:
( x 1) 2
M ( x ) M A R A x I M ( x 1) q2
2
F2 ( x 2)
0
( q1 q2 )( x 2)
2
II
2
.
III
Подставим это выражение в дифференциальное уравнение (4.16) и
проинтегрируем его два раза:
( x 1) 2
EIw( x ) M A R A x I M ( x 1) q2
2
F2 ( x 2)
0
( q1 q2 )( x 2)
2
II
2
;
III
x2
( x 1)3
EIw( x ) C M A x R A
M ( x 1) q2
2
6
I
( x 2) 2 ( q1 q2 )( x 2) 3
F2
2
6
2
II
;
III
3
x
x
EIw( x ) D Cx M A
RA
2
6
( x 2) 3 ( q1 q2 )( x 2) 4
F2
6
24
I
.
III
( x 1) 2
( x 1) 4
M
q2
2
24
II
52
а
q1=15 кН/м
М= 60 кНм МА=5 кНм
F2=30 кН
F1=20 кН
б
А
В
С
q2=10 кН/м
b=1 м
a=2 м
c=1 м
RA=30 кН
20
Эпюра Q
10
30
40
x0 = 1,33 м
25
Mmax=13,3
кНм
Эпюра М
5
10
в
35
х
q2
х
М
F2
q1
х
А
В
С
МА
q2
F1
a=2 м
c=1 м
b=1 м
RA
г
Точки перегиба
B
wC
C
B
A
Рис. 4.20. К решению примера 1 аналитическим способом:
а – схема балки с нагрузками; б) эпюры Q и М;
в – иллюстрация правил Клебша; г – изогнутая ось балки
53
Для определения постоянных С и D запишем граничные условия: в заделке (в сечении А, где находится начало координат) угол поворота и прогиб балки равны нулю, то есть
A ( x 0) w( x 0) 0 и wA w( x 0) 0 .
Подставляя эти условия в выражения для угла поворота и прогиба на
первом участке, найдем, что
C 0 и D 0.
Теперь можно определить заданные перемещения. Для определения угла поворота в сечении В подставим в выражение для угла поворота на первом участке (только до черты с номером I) значение
x 1м:
12
30
EI B EIw( x 1) M A 1 R A 5
20 кНм2.
2
2
В соответствии с правилом знаков отрицательный знак угла поворота для выбранного начала координат х справа означает, что поворот сечения происходит по часовой стрелке.
В сечении С, где требуется найти прогиб, координата х равна
4 м , и это сечение находится на третьем участке балки, поэтому подставляем х = 4 м в выражение для прогибов, используя слагаемые на
всех трех участках:
42
43
32
34
23
EIwC EIw( x 4) M A
RA
M
q2
F2
2
6
2
24
6
24
( q1 q2 )
67,1кН·м3.
24
Знак минус у найденного прогиба показывает, что сечение С перемещается вверх. Покажем найденные перемещения на изогнутой оси
балки. Чтобы нарисовать ось балки после деформации, построим
эпюру изгибающих моментов (рис. 4.20, б). Положительный знак
эпюры М на участке показывает, что балка на этом участке изгибается
выпуклостью вниз, при отрицательном знаке М изогнутая ось имеет
выпуклость вверх. Кроме того, деформированная ось балки должна
удовлетворять условиям закрепления: в нашем случае на правом конце балка имеет жесткое защемление, и, как уже отмечалось при записи граничных условий, прогиб и угол поворота в защемлении должны
54
равняться нулю. На рис. 4.20, г изображена ось рассматриваемой балки после деформации, удовлетворяющая этим условиям. На изогнутой
оси показаны найденные прогиб в сечении С и угол поворота сечения
В с учетом их знаков.
В заключение сосчитаем прогиб балки в сантиметрах, угол поворота в радианах и проверим условие жесткости. Найдем жесткость
ЕI рассматриваемой деревянной балки из трех бревен радиусом 12 см.
Момент инерции поперечного сечения
r 4
3,14 124
I 3
3
48833 см4.
4
4
Модуль упругости дерева Е = 104 МПа = 103 кН / см2. Тогда
EI 103 48833 48,8 106 кН·см2.
Прогиб балки в сечении С
67,1 106
wC
1,38 см,
6
48,8 10
а угол поворота сечения В
20 104
2
B
0
,
410
10
рад.
6
48,8 10
Очевидно (см. рис. 4.20, г), что найденный прогиб балки в сечении С является максимальным, поэтому для проверки условия жесткости сравним его с допускаемым прогибом. Для балки длиной l 4 м
допускаемый прогиб согласно условию [ w] 400 100 4 см. Таким
образом, максимальный прогиб wmax wC 1,38 см меньше допускаемого, и условие жесткости выполняется.
Пример 2
Условие задачи
В балке с двумя консолями, показанной на рис. 4.21, а надо
найти угол поворота сечения А и прогиб сечения D, используя аналитический способ. Сечение балки – двутавр № 24.
55
Решение
Выберем начало отсчета координаты х на левом конце балки в
точке А и запишем выражение для изгибающего момента на всех
участках с учетом правил Клебша :
M ( x ) 0 I RB ( x 1) M ( x 1) 0 RC ( x 5) III .
II
Подставим это выражение в дифференциальное уравнение изогнутой оси (4.16) и проинтегрируем его дважды:
( x 1) 2
( x 5) 2
;
EIw( x ) C I RB
M ( x 1) RC
2
2
II
III
x
а
x
x
A
B
1м
F=20кН
M=40 кН.м
RB=15кН
4м
C
RC=35кН
D
1м
б
20
Эпюра Q
15
20
Эпюра М
в
A
40
wA
wD
Рис. 4.21. К решению примера 2 аналитическим способом:
а – схема балки с нагрузками;
б – эпюры внутренних усилий;
в – изогнутая ось балки
56
( x 1) 3
( x 1) 2
EIw( x ) D Cx I RB
M
6
2
II
( x 5) 3
RC
6
.
III
Найдем произвольные постоянные С и D из граничных условий.
В точках В и С, где находятся опоры, прогибы не возможны. Поэтому
EIwB EIw( x 1) D C 1 0 ,
43
42
EIwC EIw( x 5) D C 5 15 40 0 .
6
2
Получили систему из двух уравнений с двумя неизвестными С и D.
Решая эту систему, найдем С = 40 кН·м2, D = – 40 кН·м3. Проанализируем результат, используя геометрический смысл произвольных постоянных С и D. На рис. 4.21, в показана изогнутая ось балки, соответствующая эпюре изгибающих моментов и условиям закрепления.
Точка А, находящаяся в начале координат, перемещается вверх, и поэтому следует ожидать, что D EIw0 EIw A будет иметь в соответствии с правилом знаков отрицательный знак. Сечение в точке А поворачивается
по
часовой
стрелке,
поэтому
постоянная
C EI 0 EI A должна быть положительна. Полученные знаки С и
D не противоречат проведенному анализу.
Теперь можно найти искомые перемещения. Угол поворота сечения А определим, подставив в выражение для w(x ) на первом участке
значение х = 0, то есть
EI A EIw( x 0) C 40 кН·м2.
Чтобы найти прогиб в точке D, в выражение для прогибов w(x )
подставляем x 6 м, используя все слагаемые этого выражения, так
как точка находится на последнем третьем участке:
53
52
13
EIwD EIw( x 6) 40 40 6 15 40 35 6,67 кН·м3.
6
2
6
Разделим полученные результаты на жесткость балки, чтобы сосчитать угол поворота в радианах, а прогиб в сантиметрах. Жесткость
стальной двутавровой балки № 24:
EI 2 104 3460 6,92 107 кН·см2.
Угол поворота сечения А
57
A
40 104
6,92 107
5,78 10 3 рад.
Прогиб точки D
wD
6,67 106
0,0964 см.
6,92 10
Положительные знаки полученных перемещений свидетельствуют о том, что поворот сечения А происходит по часовой стрелке, а
точка D перемещается вниз. Изогнутая ось балки с найденными перемещениями и точкой перегиба показана на рис. 4.21, в.
7
Определение перемещений в балке методом Максвелла – Мора
Пример 1
Условие задачи
Найдем перемещения – прогиб сечения С и угол поворота сечения В в балке, показанной на рис. 4.20, а, методом Максвелла – Мора
и сравним их с теми же перемещениями, найденными ранее аналитическим способом.
Решение
В соответствии с методом Максвелла – Мора перемещения находим по формуле (4.21). Рассмотрим два варианта использования этой
формулы:
*
аналитическое интегрирование формулы;
*
интегрирование с помощью правила Верещагина.
Вариант 1. Аналитическое интегрирование формулы
Максвелла – Мора
Для определения перемещений по формуле (4.21) выпишем выражения для изгибающих моментов в балке от заданной нагрузки на
каждом участке балки. Начало координат х можно выбирать произвольным образом, например, так, как показано на рис. 4.22, а. Тогда
выражения для изгибающих моментов на трех участках будут такими:
58
x1
а
q1=15 кН/м
x3
x2
F2=30 кН
М= 60 кНм
МА=5 кНм
А
В
С
F1=20 кН
a=2 м
б
x1
q2=10 кН/м
b=1 м
x2
c=1 м
RA=30 кН
x3
1
MA=1
x1
в
В
x2
x3
1
MA=4 м
С
RA=1
Рис. 4.22. К решению примера 1 методом Максвелла – Мора:
а – заданная нагрузка на балку;
б – обобщенная сила, соответствующая углу поворота в точке В;
в – обобщенная сила, соответствующая прогибу в точке С
участок 1: 0 x1 a ;
M ( x1 ) F1 x1 q1 x1 x1 2 ;
участок 2 : 0 x2 b ;
M ( x2 ) F1 (a x2 ) q1a(a 2 x2 ) F2 x2 q2 x2 x2 2 ;
участок 3 : 0 x3 c ;
M ( x3 ) M A R A x3 .
Найдем сначала угол поворота сечения В балки. Загрузим балку
в сечении В единичной обобщенной силой, соответствующей искомому перемещению, то есть парой сил, равной единице (рис. 4.22, б).
Запишем выражения для изгибающих моментов M 1 ( x ) на каждом
участке от единичной пары сил. Начало отсчета координаты х должно
59
быть таким же, как при записи выражений для изгибающих моментов
от заданной нагрузки (см. рис. 4.22, б). Тогда:
участок 1: 0 x1 a ; M 1 ( x1 ) 0 ;
участок 2 : 0 x2 b ; M 1 ( x2 ) 0 ;
участок 3 : 0 x3 c ; M 1 ( x3 ) 1 .
Подставим записанные выражения в интеграл Максвелла – Мора
(4.21) и проинтегрируем (на первых двух участках интегралы в рассматриваемом примере равны нулю):
1 c
1
c2
1
12
1 B
( M A R A x3 ) 1dx3 ( M Ac R A ) (5 1 30 )
EI 0
EI
2
EI
2
20 кН м 2
=
.
EI
Чтобы найти прогиб сечения С , приложим в точке С новую единичную обобщенную силу – сосредоточенную силу, положив ее равной единице (рис. 4.22, в). Выражения для изгибающих моментов
M 2 ( x ) на каждом участке от единичной сосредоточенной силы будут
такими:
участок 1: 0 x1 a ;
M 2 ( x1 ) 1 x1 ;
участок 2 : 0 x2 b ;
M 2 ( x2 ) 1 (2 x2 ) ;
M 2 ( x3 ) 4 1 x3 .
участок 3 : 0 x3 c ;
После подстановки функций M (x) и M 2 ( x ) в интеграл (4.21) и
интегрирования на каждом участке получим
q1 x12
1 a
2 wC
{ ( F1 x1
)( 1 x1 )dx1
EI 0
2
b
q2 x 22
F1 ( a x 2 ) q1a ( a / 2 x 2 ) F2 x 2
( 1)( 2 x 2 )dx2
2
0
67,1 кН м 3
( M A R A x3 )( 4 1 x3 )dx3 }
.
EI
0
Величины найденных перемещений совпадают с результатами,
полученными ранее аналитическим способом, а знак у угла поворота
другой. Это следствие разных правил знаков в аналитическом методе
c
60
и методе Максвелла – Мора. Обсудим полученные знаки перемещений. Положительный знак угла поворота показывает, что поворот
происходит по направлению обобщенной силы. Поскольку единичная
пара принята направленной по часовой стрелке, то и сечение В поворачивается по часовой стрелке. Отрицательный знак прогиба означает, что сечение С перемещается в сторону, противоположную принятому направлению единичной силы, то есть вверх. Таким образом, результаты решения полностью совпадают с полученными ранее аналитическим методом.
Вариант 2. Интегрирование формулы Максвелла – Мора с помощью
правила Верещагина
Как отмечалось раньше, процесс интегрирования формулы
Максвелла – Мора с помощью правила Верещагина (или Симпсона)
называется "перемножением эпюр". Чтобы "перемножить эпюры",
построим их. Сначала построим эпюру изгибающих моментов от заданной нагрузки (рис. 4.23, а). Разобьем эпюру М на 6 простых фигур:
три треугольника 1 , 2 и 3 , два сегмента, ограниченных квадратной параболой, 4 и 5 и трапецию 6 . Порядок разбивки эпюры
моментов на составляющие фигуры на втором участке поясняет
рис. 4.249. Найдем площади этих фигур:
10 2
25 1
1
10 кН·м2,
2
12,5 кН·м2,
2
2
10 1
15 2 3
2
3
5 кН·м ,
4
10 кН·м2,
2
12
3
35 5
10 1
5
6
1 20 кН·м2.
5
кН·м2,
2
12
6
Эпюру М на втором участке можно разбить и на две фигуры: трапецию,
у которой основания имеют разные знаки (10 и –25) и сегмент 5 . В этом случае удобно воспользоваться правилом перемножения трапеций (4.24).
9
61
а
q1=15 кН/м
М= 60 кНм МА=5 кНм
F2=30 кН
А
В
С
F1=20 кН
a=2 м
q2=10 кН/м
1/2 м
4
б
2
5
1
1м
c=1 м
b=1 м
2/3 м
1/3 м
10
3
25
Эпюра М
5
6
35
1/3 м
1
В
в
RA=30 кН
МА=1
6
Эпюра М1
1
1
МА=4 м
С
4
1
3
2
6
RA=1
4
Эпюра М2
5
Рис. 4.23. Эпюры моментов: а – от заданной нагрузки;
б – от единичной обобщенной силы, соответствующей углу поворота сечения В;
в – от единичной обобщенной силы, соответствующей прогибу в точке С.
Для определения площадей 4 и 5 использована формула
(4.23). Затем строим эпюры моментов от единичных обобщенных сил,
соответствующих искомым перемещениям. Чтобы определить угол
поворота сечения В, приложим в точке В балки пару сил, равную
единице, и построим эпюру изгибающих моментов М1 от этой пары
сил (рис. 4.23, б). Найдем ординату под центром тяжести площади 6 .
62
25
2
=
10
b=1м
25
1/3 b 2/3 b
+
2/3 b
1/3 b 10
5
+
3
1/2 b
1/2 b
Рис. 4.24. Разбивка эпюры М на втором участке на три площади
Независимо от положения центра тяжести трапеции (а оно не определено) ордината под центром тяжести равна единице, так как изгибающий момент М1 на участке перемножения является постоянной величиной, всюду равной единице. То есть 6 1 . Поскольку на всех
остальных
участках
изгибающий
момент
М1 =
0
и
1 2 3 4 5 0 , то по формуле (4.22) искомое перемещение
20 кН м 2
1
1
.
1 B
6 6
20 1
EI
EI
EI
Полученная величина угла поворота совпадает с найденной ранее аналитическим методом. Положительный знак говорит о том, что
поворот сечения В происходит по направлению обобщенной силы, то
есть в соответствии с принятым на рис. 4.23, б направлением единичной пары по часовой стрелке. Теперь будем искать прогиб сечения С.
Загрузим балку новой обобщенной силой, соответствующей прогибу в
точке С. Такой обобщенной силой будет сосредоточенная сила, равная
единице и приложенная в точке С. Эпюра изгибающих моментов М2
от этой единичной силы показана на рис. 4.23, в. Согласно формуле
(4.22) искомый прогиб
1 6
2 wC
k k .
EI k 1
Найдем ординаты на эпюре М2, расположенные под центрами
тяжести шести фигур, на которые разбита эпюра М. Положение центров тяжестей всех фигур, кроме 6 , показано на рис. 4.23, а. Ординату на эпюре М2, расположенную под центром тяжести какой-то фи-
63
гуры, можно найти либо из подобия треугольников, либо как изгибающий момент от единичной силы под центром тяжести рассматриваемой фигуры. Используем второй вариант вычисления ординат. Изгибающий момент под центром тяжести треугольника 1 равен значению силы (1), расположенной слева от сечения, умноженной на плечо
( 4 3 м), со знаком минус. То есть
4
1 м.
3
Аналогично ордината под центром тяжести треугольника 2
равна силе (1), умноженной на плечо (2 +2/3 = 8/3 м), со знаком минус. И так же для остальных фигур, положение центров тяжести которых известно:
8
7
5 2,5 м.
2 м,
3 м,
4 1 м,
3
3
Поскольку положение центра тяжести трапеции 6 не определено и невозможно в этом случае найти ординату под центром тяжести,
воспользуемся на этом участке формулой перемножения трапеций
(4.24):
1
6 6 2 35 ( 3) 2 5 ( 4) 35 ( 4) 5 ( 3) 67,5 кН·м3.
6
Искомое перемещение – прогиб в точке С
1
4
8
7
5
2 wC
[10( ) ( 12,5)( ) 5( ) 10( 1) ( )( 2,5)
EI
3
3
3
6
67,1 кН м3
.
67,5]
EI
Результат совпадает с найденным ранее прогибом в точке С аналитическим способом. Отрицательный знак перемещения показывает,
что точка С перемещается в сторону, противоположную выбранному
направлению единичной силы (см. рис. 4.23, в), то есть вверх.
64
Пример 2
а
F=20кН
.
A
B
1м
M=40 кН м
RB=15кН
C
4м
RC=35кН
4/3 м
D
1м
20 3
2
Эпюра М
б
40
1
1
1/4
1
4/3 м
2
2/3 м
1/4
Эпюра М1
1
в
1
1/4
1
2
5/4
1 3
Эпюра М2
Рис. 4.25. Эпюры моментов: а – от заданной нагрузки;
б – от единичной обобщенной силы,
соответствующей углу поворота сечения А;
в – от единичной обобщенной силы,
соответствующей прогибу в точке D
Условие задачи
Определим
угол поворота
сечения А и
прогиб сечения
D в балке, показанной
на
рис. 4.21, а, методом Максвелла – Мора с использованием
правила Верещагина (перемножением
эпюр).
Ранее
эти перемещения
были
найдены аналитическим методом,
сравним
результаты, полученные двумя
способами.
Решение
Построим
эпюры изгибающих моментов
от заданной нагрузки (рис. 4.25, а) и от единичных обобщенных сил,
соответствующих искомым перемещениям (рис. 4.25, б, в). Разобьем
эпюру моментов от заданной нагрузки на три треугольника и найдем
их площади:
65
40 4
20 4
80 кН·м2;
2
40 кН·м2;
2
2
20 1
3
10 кН·м2.
2
Для определения угла поворота сечения А перемножим эпюры
М и М1. Для этого найдем ординаты на эпюре М1, расположенные под
центрами тяжести треугольников:
2
1
1 ; 2 ; 3 0 .
3
3
Тогда угол поворота сечения А согласно формуле (4.22)
1
1
1
2
1
A
M
M
dx
(
)
(
80
40
)
1
1 1
2 2
3 3
EI
EI
EI
3
3
40 кН м 2
.
EI
Положительный знак угла поворота показывает, что поворот сечения А происходит по направлению обобщенной силы, то есть в соответствии с показанной на рис. 4.25, б единичной парой сил по ходу
часовой стрелки. Результат совпадает с полученным ранее аналитическим способом.
Чтобы найти прогиб сечения D, используем при перемножении
эпюру М2. Ординаты на эпюре М2 под центрами тяжести треугольников будут такими:
1
2
2
1 м;
2 м; 3 м.
3
3
3
Найдем прогиб сечения D по формуле (4.22):
1
1
wD
M M 2 dx (11 2 2 33 )
EI
EI
1
1
2
2
6,67 кН м3
.
( 80 40 10 )
EI
3
3
3
EI
Прогиб сечения D получился положительным. Это означает, что
точка D перемещается по направлению единичной силы. Поскольку
единичная сила показана на рис. 4.25, в направленной вниз, то и перемещение точки D происходит вниз. Полученный результат совпадает с тем, который был получен ранее аналитическим способом.
1
66
4.2. РАСЧЕТ СТАТИЧЕСКИ ОПРЕДЕЛИМЫХ РАМ
Рекомендуемая литература
Александров А. В., Потапов В. Д., Державин Б. П. Сопротивление материалов. М.: Высш. шк., 1995. Гл. 2 (§ 2.6), гл. 8 (§ 8.9).
Дарков А. В., Шпиро Г. С. Сопротивление материалов. М.: Высш. шк.,
1989. Гл. 11 (§ 11.4, 11.5).
Основные определения
Статически определимая рама – конструкция, состоящая из
нескольких изгибаемых стержней, закрепленных так, что опорные реакции и внутренние усилия можно найти с помощью уравнений статики. Чаще всего стержни рамы соединены между собой жестким образом, так, что в процессе деформации угол между стержнями не меняется. Мы будем рассматривать только плоские рамы, стержни которых расположены под углом 90°. Вертикальные стержни рамы принято называть стойками, горизонтальные – ригелями. В стержнях плоских рам возникают три внутренних усилия: продольная и поперечная
силы и изгибающий момент.
Внутренние усилия в рамах определяются методом сечений, и
порядок их нахождения тот же, что и для балок. Напомним, что согласно методу сечений:
*
продольная сила N равна сумме проекций всех сил, действующих с одной стороны от сечения, на ось стержня;
*
поперечная сила Q равна сумме проекций всех сил, действующих с одной стороны от сечения, на ось, перпендикулярную оси
стержня;
*
изгибающий момент M равен сумме моментов всех сил, действующих с одной стороны от сечения, относительно оси, проходящей через центр тяжести рассматриваемого сечения.
Правила знаков для продольной и поперечной сил те же, что и
раньше: растягивающая продольная сила положительна, поперечная
сила положительна, если она обходит сечение по ходу часовой стрелки. Правило знаков для изгибающего момента в рамах следующее:
момент считается положительным, если он изгибает стержень рамы
67
выпуклостью вовнутрь10. На эпюрах N и Q положительные значения
принято откладывать снаружи, на эпюре М – внутри – со стороны растянутых волокон.
От действия трех внутренних усилий в стержнях рамы возникают напряжения: нормальные и касательные. Нормальные напряжения
определяются как сумма напряжений от продольной силы ( N / A ) и от
изгибающего момента по формуле (4.1). Касательные напряжения
находят по формуле Журавского (4.2).
Перемещения точек оси рамы определяются, как правило, методом Максвелла – Мора по формуле (4.21). Заметим, что произвольная
точка оси рамы в отличие от точки оси балки может перемещаться не
только по вертикали, но и по горизонтали. Будем обозначать линейные перемещения точек оси рамы буквой , отмечая направление перемещения индексом сверху: верти гор. Углы поворота сечений рамы,
как и балок, обозначаем буквой .
Примеры решения задач
4.2.1. Определение внутренних усилий в рамах
(задачи № 21, 22)
Условие задачи
Рассмотрим раму, показанную на рис. 4.26, и определим в ней
внутренние усилия, то есть построим эпюры N, Q и М.
Решение
Найдем три опорные реакции, используя три уравнения статики.
Желательно составлять такие уравнения, чтобы в каждое из них входила бы только одна неизвестная реакция. В данном примере это такие уравнения (предполагаемые направления реакций показаны на
рис. 4.27, а):
Для некоторых рам невозможно определить, где внешняя часть рамы, а
где внутренняя. В этом случае знак изгибающего момента не определяется и
эпюра изгибающих моментов строится со стороны растянутых волокон без знака.
10
68
М=30 кНм
mA 0 ;
F 3 M q 4 2 H B 2 0;
q=20 кН/м
H B 35 кН;
B
проекций сил на вертикальную
2м
ось равна 0; F R A 0 ;
F=20 кН
R A 20 кН;
А
F 3 M H A 2 0;
mC 0 ;
H A 45 кН.
3м
Для проверки используем уравнение
"сумма проекций сил на горизонтальРис. 4.26. Схема рамы
ную ось равна нулю":
с нагрузками
H A H B q 4 45 35 20 4 0 .
Находим внутренние усилия, используя метод сечений. Рама
имеет три участка. Заметим, что если для балки границей между
участками считалось сечение, где появлялся новый силовой фактор,
то для рам границей между участками является также и узел, где соединяются соседние стержни рамы (стойка и ригель). Рассечем
стержни рамы на трех участках и выберем начало отсчета х на каждом
участке (удобно начало отсчета выбирать в начале участка –
рис. 4.27, а). Запишем выражения для продольной, поперечной сил и
2м
а
x2
б
М=30 кНм
в
40
20
35
E
D
г
70
20
q=20 кН/м
C
B
F=20 кН
x1
A
RA
HA
x3
35
20
HB
20
2,25 м
35
Mmax=50,6
45
Эпюра N
Эпюра Q
Эпюра M
Рис. 4.27. Определение внутренних усилий в раме:
а – схема рамы с нагрузками; б, в, г – эпюры внутренних усилий
69
изгибающего момента на каждом участке, используя вышеприведенные определения этих усилий и правила знаков для них:
участо к 1:
0 x1 4 м;
N ( x1 ) R A 20 кН;
Q( x1 ) H A q x1 45 20 x1 ;
qx12
M ( x1 ) H A x1
45 x1 10 x12 ;
2
участо к 2:
0 x2 3 м;
N ( x2 ) H A q 4 35кН;
Q( x2 ) R A 20 кН;
M ( x2 ) H A 4 q 4 2 R A x2 45 4 20 8 20 x2
20 20 x2 ;
участо к 3:
0 x3 2 м;
N ( x3 ) F 20 кН;
Q ( x3 ) H B 35 кН;
M ( x3 ) H B x3 35 x3 .
Строим эпюры усилий, используя написанные выражения
(рис. 4.27, б, в, г). Значение максимального момента определяем так
же, как в балках.
Проверку правильности построения эпюр в рамах производим,
проверяя равновесие узлов. Для этого вырезаем узлы (в рассматриваемой раме их два: D и E) и прикладываем к сечениям, примыкающим
к узлам, все внутренние усилия согласно построенным эпюрам.
Направление усилий должно соУзел D
Узел Е
ответствовать их знакам. На
30
20
рис. 4.28 показаны вырезанные
20
35
35
из рамы узлы D и E вместе с дей35
40 20
35 ствующими в сечениях, примы20 кающих к узлам, внутренними
20
усилиями. Видно, что узлы нахо20
70
дятся в равновесии. Из условия
равновесия узлов следует, что,
Рис. 4.28. Проверка равновесия узлов
если в узле не приложена внеш-
70
няя пара сил (узел D), то изгибающие моменты в сечениях, примыкающих к узлу, обязательно одинаковы. То есть, зная изгибающий момент в угловой точке для стойки, можно получить графически ординату М в угловой точке для ригеля, проведя циркулем дугу из вершины угла, как из центра. Если в узле действует сосредоточенная пара
сил, то значения изгибающих моментов в примыкающих сечениях отличаются на величину этой пары.
4.2.2. Определение перемещений в рамах (задачи № 21, 22)
Условие задачи
Для рамы, показанной на рис. 4.26, найдем вертикальное перемещение точки В и угол поворота сечения А. Жесткость стержней рамы будем считать одинаковой ( EI const ). Перемещения ищем методом Максвелла – Мора, интегрируя формулу Максвелла – Мора аналитически и графически (с помощью правила Верещагина).
Решение
Будем искать первое обобщенное перемещение – вертикальное
перемещение точки В. В соответствии с методом Максвелла – Мора
для определения этого перемещения приложим в точке В единичную
вертикальную сосредоточенную силу (рис. 4.29, а) и найдем изгибах2
a
б
х3
В
1
х1
х2
3/2
1/2
х1
1/2 А
А
х3
В
1
3/2
1
Рис. 4.29. Рама под действием единичной обобщенной силы:
верт
а – соответствующей B
; б – соответствующей A
71
ющий момент, вызванный этой нагрузкой (координаты x1 , x 2 , x 3
должны отсчитываться так же, как при определении момента от заданной нагрузки):
участо к 1:
0 x1 4 м;
M 1 ( x1 ) H A x1 3 / 2 x1 ;
0 x 2 3 м;
участо к 2:
M 1 ( x2 ) H A 4 R A x2 6 1 x2 ;
0 x3 2 м;
участо к 3:
M 1 ( x3 ) H B x3 3 / 2 x3 .
Аналогично для определения второго обобщенного перемещения – угла поворота сечения А – приложим в точке А сосредоточенную пару сил, равную единице (рис. 4.29, б), и определим изгибающий момент от этой пары:
участо к 1:
0 x1 4 м;
M 2 ( x1 ) H A x1 1 1 / 2 x1 1 ;
0 x 2 3 м;
участо к 2:
M 2 ( x2 ) H A 4 1 1 ;
0 x 3 2 м;
участо к 3:
M 2 ( x3 ) H B x3 1 / 2 x3 .
Вариант 1. Аналитическое интегрирование формулы
Максвелла – Мора
Подставим в формулу Максвелла – Мора (4.21) выражения для
изгибающих моментов от заданной нагрузки, найденные ранее при
определении внутренних усилий в рассматриваемой раме, умножим
их на выражения для изгибающих моментов от единичных обобщенных сил на всех трех участках и выполним интегрирование. Тогда,
учтя, что EI const , проинтегрируем формулу (4.21):
4
3
верт.
2 3
EI B ( 45 x1 10 x1 ) x1dx1 (20 20 x2 )(6 x2 ) dx2
2
0
0
2
3
( 35x3 ) x3dx3 250 кН·м3;
2
0
72
EI A
4
2 1
(
45
x
10
x
1
1 )( x1
2
0
3
1)dx1 (20 20 x2 )1dx2
0
2
1
( 35x3 ) x3dx3 –63,3 кН·м2.
2
0
В соответствии с правилом знаков метода Максвелла – Мора положительный знак вертикального перемещения говорит о том, что
точка В перемещается по направлению обобщенной силы, то есть
вверх. Сечение А поворачивается по часовой стрелке (в сторону, противоположную направлению единичной пары сил, так как знак угла
поворота отрицательный).
Вариант 2. Интегрирование формулы Максвелла – Мора с помощью
правила Верещагина
Построим эпюры моментов от заданной нагрузки М и от единичных обобщенных сил, соответствующих искомым перемещениям,
М1 и М2 (рис. 4.30). Для перемножения эпюр разобьем эпюру М на 4
простые фигуры: два треугольника 1 и 3, сегмент 2 и трапецию 4.
Найдем ординаты под центрами тяжести этих фигур на эпюре М1 (1,
2 и 3 на рис. 4.30, б). Эпюру М на ригеле, имеющую форму трапеции 4 с основаниями разного знака, умножаем на трапецию эпюры
М1 по правилу трапеций (4.24). Согласно правилу Верещагина
а
4
20
1
3
2
в
40
2/3м
6
4=1
3
6
70
20
8/3 м
2м
б
1
3
1
1
1=4
3=2
1=1/3
3=2/3
2=0
2=3
1
Эпюра M
Эпюра M1
Эпюра M2
Рис. 4.30. Эпюры моментов: а – от заданной нагрузки;
верт.
б – от единичной обобщенной силы, соответствующей B ;
в – от единичной обобщенной силы, соответствующей A
73
EI
верт
B
20 4
20 43
70 2
k k
4
3
2
2
12
2
k 1
4
3
( 2 20 6 2 40 3 40 6 20 3) 250 кН·м3.
6
Аналогично находим угол поворота сечения А, перемножая эпюры М и М2. Ординаты под центрами тяжести площадей 1, 2 и 3 показаны на рис. 4.30, в (1, 2 и 3). Для перемножения трапеции 4
на прямоугольник эпюры М2 нет необходимости пользоваться правилом трапеций, так как, где бы ни находился центр тяжести трапеции,
значение 4 известно (ординаты на эпюре М2 на этом участке постоянны).
4
20 4 1 20 43
70 2 2 20 40
EI A k k
0
3 1
2
3
12
2
3
2
k 1
63,3 кН·м2.
Результаты, полученные по двум вариантам использования формулы Максвелла – Мора, совпадают.
верт.
В
B
В заключение построим деформированную ось рамы так, чтобы она
A
А
удовлетворяла эпюре изгибающих моментов и условиям закрепления рамы
(рис. 4.31). На рис. 4.31 показаны поРис. 4.31. Изогнутая ось рамы
лученные перемещения – верт.
, А в
B
соответствии с их направлениями. Точка перегиба (крестик) изогнутой оси ригеля имеет место в сечении, где меняет знак изгибающий
момент. Углы рамы в процессе деформации не меняются.11
.
Для наглядности на изогнутой оси перемещения показаны преувеличенно большими (использован разный масштаб для изображения оси рамы и
перемещений). В связи с этим на рис. 4.31 для изображения подвижной опоры
применено другое обозначение.
11
74
4.3. РАСЧЕТ СТАТИЧЕСКИ НЕОПРЕДЕЛИМЫХ БАЛОК И РАМ
Рекомендуемая литература
Александров А. В., Потапов В. Д., Державин Б. П. Сопротивление материалов. М.: Высш. шк., 1995. Гл. 9 (§ 9.1–9.3).
Гастев В. А. Краткий курс сопротивления материалов. М.: Физматгиз,
1977. Гл. 9.
Дарков А. В., Шпиро Г. С. Сопротивление материалов. М.: Высш. шк.,
1989. Гл. 12 (§ 12.1–12.6).
Основные определения
Статически неопределимые балки и рамы – конструкции, в
которых уравнений статики недостаточно для определения опорных
реакций и внутренних усилий. Число связей, наложенных на статически неопределимую систему, больше того количества связей, которые
обеспечивают геометрическую неизменяемость конструкции. Такими
связями могут быть как опорные связи, так и стержни самой конструкции. Будем рассматривать балки и простые рамы, то есть такие
конструкции, в которых связями, обеспечивающими геометрическую
неизменяемость, являются опорные закрепления (опорные связи). Для
обеспечения геометрической неизменяемости балки (рамы) в плоскости достаточно трех связей. Каждая связь запрещает какое-то перемещение. Шарнирно-подвижная опора запрещает перемещение по
направлению, перпендикулярному плоскости опирания, и является
одной связью. Шарнирно-неподвижная опора делает невозможными
линейные перемещения по двум взаимно-перпендикулярным направлениям (вертикальному и горизонтальному) и соответствует двум связям, наложенным на конструкцию. Наконец, при наличии жесткого
защемления на конце стержня становятся невозможными все перемещения: и вертикальное, и горизонтальное, и угол поворота, поэтому
жесткое защемление представляет собой три связи, обеспечивающие
геометрическую неизменяемость балки (рамы). Каждая дополнительная связь сверх трех для плоских систем превращает конструкцию в
статически неопределимую. Такие дополнительные связи, которые не
являются необходимыми для обеспечения геометрической неизменяемости конструкции, называются лишними.
75
Перед расчетом статически неопределимой конструкции необходимо сначала определить степень статической неопределимости
рассматриваемой системы. Для балок и простых рам степень статической неопределимости равна числу лишних опорных связей. В каждой связи возникает опорная реакция, поэтому степень статической
неопределимости можно найти, сосчитав разность между количеством неизвестных опорных реакций и числом независимых уравнений статики. Например, балка на рис. 4.32, а является один раз статиа
б
А
В
в
А
wB 0
А
В
Х
Х
В
A 0
Рис. 4.32. К расчету статически неопределимой балки:
а – заданная статически неопределимая балка;
б – основная система и условие совместности деформаций (вариант 1);
в – основная система и условие совместности деформаций (вариант 2)
чески неопределимой, так как имеет 4 связи и 4 неизвестные опорные
реакции, а количество независимых уравнений равновесия – 3. В раме, показанной на рис. 4.34, а, число наложенных связей и опорных
реакций в них равно 5, и эта рама является дважды статически
неопределимой (в ней две лишние связи). Если в один из стержней
балки (рамы) врезан шарнир, то количество связей уменьшается на
единицу, так как становится возможным взаимный поворот сечений,
примыкающих к шарниру. Появляется дополнительное уравнение для
определения опорных реакций: "изгибающий момент в шарнире равен нулю" или можно сказать по-другому: "сумма моментов всех сил,
расположенных слева (или справа) от шарнира, равна нулю". Так,
балка с врезанным в точке Е шарниром, показанная на рис. 4.33, а, является один раз статически неопределимой: от 5 опорных связей надо
вычесть одну связь, связанную с наличием дополнительного шарнира
в точке Е. Из четырех оставшихся связей одна является лишней.
Можно сосчитать степень статической неопределимости этой балки и
76
а
б
A E
B
C
в
A E
D
B
A E
D
C
X
B
X
C
D
X
wD 0
.
вз
C 0
Рис. 4.33. К расчету статически неопределимой балки с шарниром:
а – заданная статически неопределимая балка;
б – основная система и условие совместности деформаций (вариант 1);
в – основная система и условие совместности деформаций (вариант 2)
а
б
B
в
X1 B
C
X2
B
C
C
гор
B 0
А
А
верт
С
0
X1
А
гор
X2
A 0
A 0
Рис. 4.34. К расчету статически неопределимой рамы:
а – заданная статически неопределимая рама;
б – основная система и условия совместности деформаций (вариант 1);
в – основная система и условия совместности деформаций (вариант 2)
иначе: для определения пяти опорных реакций можно составить четыре уравнения статики (дополнительное уравнение "изгибающий
момент в шарнире Е равен нулю"). Разность между числом реакций и
количеством уравнений статики равна единице, то есть балка один раз
статически неопределима.
Рассмотрим один из способов расчета статически неопределимых балок и рам, а именно тот, который основан на том же принципе,
что и расчет рассмотренных ранее статически неопределимых стержневых конструкций, работающих на растяжение-сжатие, кручение.
Согласно этому способу для определения всех неизвестных к необхо-
77
димым уравнениям равновесия добавляются уравнения совместности
деформаций. При определении деформаций в уравнениях совместности деформаций используются физические уравнения (закон Гука). Из
решения полученной системы уравнений можно найти все неизвестные реакции и определить внутренние усилия.
Для уменьшения в системе уравнений количества неизвестных,
которые определяются в первую очередь, при расчете балок и рам чаще всего используют прием, связанный с выбором основной системы.
Основная система – это статически определимая конструкция, полученная из заданной системы путем отбрасывания лишних связей. Реакции в отброшенных связях принято называть лишними неизвестными и обозначать Хi. Решение задачи (раскрытие статической
неопределимости) сводится сначала к определению лишних неизвестных. Для их нахождения используются уравнения совместности деформаций – это условия кинематической эквивалентности основной и
заданной систем, то есть равенства, приравнивающие нулю деформации по направлению отброшенных в основной системе связей. Количество уравнений совместности деформаций равно степени статической неопределимости. Зная величины лишних неизвестных, можно
найти из уравнений равновесия остальные реакции. Обсудим подробно, как выбирать основную систему и записывать уравнения совместности деформаций.
На рис. 4.32, б, в – 4.34, б, в показаны по два варианта основных
систем, выбранных для заданных систем, изображенных на
рис. 4.32, а – 4.34, а. Балка на рис. 4.32, а один раз статически
неопределима, для выбора основной системы необходимо отбросить
одну связь. В первом варианте основной системы, изображенном на
рис. 4.32, б, отброшена подвижная опора в точке В. Вертикальная реакция в отброшенной связи (лишняя неизвестная) обозначена буквой
Х. Условие совместности деформаций для этого варианта основной
системы: wB 0 – это условие, приравнивающее нулю вертикальное
перемещение (прогиб) в точке В балки, так как в заданной системе
этот прогиб был невозможен. Во втором варианте на рис. 4.32, в жесткое защемление заменено шарнирно-неподвижной опорой. Лишней
неизвестной является реактивный момент. Поскольку в точке А стал
78
возможным поворот сечения, то условие совместности деформаций
полагает этот угол поворота равным нулю: A 0 .
Для выбора основной системы в дважды статически неопределимой раме на рис. 4.34, а требуется отбросить две связи. На
рис. 4.34, б, в лишние неизвестные обозначены Х1 и Х2. В основной
системе, показанной на рис. 4.34, б, стали возможны по сравнению с
заданной системой горизонтальное перемещение в точке В – гор
и
B
вертикальное перемещение в точке С – Cверт , поэтому эти перемещения необходимо приравнять нулю. Это и есть условия совместности
деформаций для варианта основной системы, показанной на
рис. 4.34, б:
верт
(4.26)
гор
0.
B 0; C
Аналогично для основной системы, изображенной на рис. 4.34, в,
условия совместности деформаций следующие: гор
A 0; A 0 .
Обсудим еще вариант 2 основной системы, показанный на
рис. 4.33, в. В точке С сделан разрез стержня и между соседними сечениями вставлен шарнир. Лишней неизвестной в этом случае является изгибающий момент, возникающий в сечении С при отсутствии
шарнира. Этот изгибающий момент изображен на рис. 4.33, в в виде
двух одинаковых пар сил Х. Чтобы записать уравнение совместности
деформаций, надо понять, чем отличается деформация заданной системы от деформации рассматриваемой основной системы. В заданной системе поворот соседних сечений, расположенных бесконечно
близко слева и справа от точки С, возможен на
один и тот же угол (сечения "склеены"). После
вз
C
разреза и добавления шарнира соседние сечения
могут поворачиваться относительно друг друга на
угол Cвз (рис. 4.35). Этот взаимный угол поворота соседних сечений в точке С мы и должны положить равным нулю при записи условия совРис. 4.35. Взаимный
вз
местности деформаций: C
0.
угол поворота
Для определения лишних неизвестных необсечений
ходимо найти деформации в условиях совместнооколо шарнира
79
сти деформаций любым способом. Как правило, деформации находят
методом Максвелла – Мора с использованием правила Верещагина.
Удобно искать деформации отдельно от заданной нагрузки (P) и от
лишних неизвестных ( X i ) . Например, условия совместности деформаций (4.26) можно записать так:
гор
гор
гор
(4.27)
гор
B B ( P) B ( X 1 ) B ( X 2 ) 0 ;
(4.28)
Cверт Cверт ( P) Cверт ( X 1 ) Cверт ( X 2 ) 0 .
Таким образом, для дважды статически неопределимой системы
получаем систему уравнений из двух уравнений с двумя неизвестными, из которых и находим лишние неизвестные. После определения
X 1 и X 2 находим остальные неизвестные реакции и строим окончательные эпюры внутренних усилий N, Q и М, используя уравнения
статики.
Окончательную эпюру изгибающих моментов для один раз статически неопределимой системы можно проверить, перемножив ее с
эпюрой моментов от единичной силы12. Результатом этого перемножения должен быть ноль, то есть
M M1
dx 0 .
(4.29)
EI
Условие (4.29) – это условие совместности деформаций, подтверждающее равенство нулю деформаций по направлению лишней неизвестной.
Если конструкция два раза статически неопределима, то результат перемножений эпюры М и эпюр М1 и М2 должен равняться нулю.
12
80
Примеры решения задач
4.3.1. Расчет статически неопределимой балки
(задача № 23)
Условие задачи
М
A E
C
B
D
Балка, показанная на рис. 4.36, с шарниром в точке Е загружена сосредоточенной
парой М. Требуется определить внутренние
усилия и построить изогнутую ось балки.
Решение
Как было показано выше, заданная
Рис. 4.36. Заданная балка балка является один раз статически неопределимой. Выберем основную систему, отбросив одну лишнюю связь, например, подвижную опору в точке D
(рис. 4.37). Опорную реакцию в точке D бу- М
дем считать лишней неизвестной и обознаD
A E B C
чим буквой Х. Уравнением для определения
Х
лишней неизвестной является уравнение
a a
a
a
совместности деформаций. Для выбранной
основной системы это условие, приравнивающее нулю прогиб балки в точке D:
Рис. 4.37. Основная
wD 0 . Прогиб в точке D можно найти как
система
сумму прогиба, вызванного заданной
нагрузкой (парой сил М) и прогиба от лишней неизвестной Х, т. е.
условие совместности деформаций можно записать так:
wD wD ( M ) wD ( X ) 0 .
Будем искать прогиб методом Максвелла – Мора с использованием правила Верещагина. Сначала найдем wD (M ) . Для этого построим
в основной системе эпюры изгибающего момента от заданной нагрузки (пары М в данной задаче) – ММ и изгибающего момента от единичной обобщенной силы, соответствующей искомому перемещению, –
М1. Чтобы построить эпюру ММ, найдем опорные реакции. Горизонтальная реакция НА в балках при отсутствии горизонтальной состава
а
а
а
81
ляющей нагрузки всегда равна нулю – это следует из уравнения равновесия "сумма проекций всех сил на горизонтальную ось равна нулю". Для определения трех других опорных реакций RA, RB и RC составим три уравнения равновесия:
RA M / a ;
m Eслева 0 ; M R Aa 0 ;
M R A 2a RC a 0 ;
RC M / a ;
mB 0 ;
M R A 3a RB a 0 ;
RB 2 M / a .
mC 0 ;
При составлении уравнеа
RB= 2M/a
М
ний статики было принято, что
HA=0 A E B C
все реакции действуют вверх,
полученные знаки учтены в
направлении
реакций
на
RC= M/a
RA= M/a
а
а
а а
рис. 4.38, а. Первое уравнение
равновесия связано с наличием
М
б
шарнира в точке Е балки и поэпюра ММ казывает, что изгибающий моМ
в
мент в шарнире равен нулю, то
HA=0 A E
есть сумма моментов всех сил
B C D 1
слева (или справа) от шарнира
равна нулю. Эпюра изгибающих
RC= 2
RA= 0
RB= 1
моментов ММ от заданной
а
г
эпюра М1 нагрузки
показана
на
д
рис. 4.38, б. Чтобы построить
HA=0 A E
эпюру изгибающих моментов от
B C D
единичной обобщенной силы,
Х
приложим эту силу к балке. ПоRC= 2X
RA= 0
RB= X
скольку определяем прогиб в
е
эпюра МХ точке D, то согласно методу
Максвелла – Мора прикладываХа
ем в точке D сосредоточенную
Рис. 4.38. Схемы балки и эпюры
силу,
равную
единице
изгибающих моментов:
(рис. 4.38, в). Находим опорные
а, б – от заданной нагрузки;
реакции и строим эпюру М1
в, г– от единичной силы;
аналогично выполненному рад, е– от лишней неизвестной
нее построению эпюры ММ
82
(рис. 4.38, г). Вычисляем прогиб в точке по формуле Максвелла – Мора, перемножая эпюры ММ и М1:
M M M1
1 M a a Ma 2
.
wD ( M )
dx
EI
EI 2 3 6EI
Теперь ищем прогиб в точке D от лишней неизвестной Х –
wD ( X ) . Строим эпюру МХ (рис. 4.38, е) и перемножаем ее с эпюрой
М1, пользуясь правилом Верещагина:
M X M1
1 Xa a 2
2 Xa 3
.
wD ( X )
dx
a2
EI
EI 2 3
3EI
Складываем wD (M ) и wD ( X ) , находим полное перемещение и
в соответствии с условием совместности деформаций приравниваем
его нулю:
Ma 2 2 Xa 3
wD
0.
6EI
3EI
M
Отсюда X
.
4a
Итак, мы нашли лишнюю неизвестную Х из условия совместности деформаций. ПрикладыM
ваем ее к заданной системе,
a A E
B C D
не меняя направления, так
как значение Х получилось
X= M/4a
положительным.
Строим
RA= M/a
RB= 9M/4a
окончательные эпюры внута RC= 3M/2a
а
а
а
ренних усилий и от задан5M/4a
ных нагрузок (пары сил М),
б
M/4a
и от лишней неизвестной Х.
Эпюра Q
M/a
Эти эпюры показаны на
M
рис. 4.39, б, в.
в
Эпюра М
Заканчиваем решение
M/4
M
проверкой результатов. Часто
можно
обнаружить
Рис. 4.39. Окончательные эпюры
ошибку, если построить изовнутренних усилий в заданной балке
гнутую ось балки. Изогнутая
ось должна удовлетворять
83
как эпюре моментов, которая показывает, в какую сторону направлена
выпуклость оси балки после изгиба, так и условиям закрепления балки. На рис. 4.39, а показана деформированная ось балки, удовлетворяющая указанным условиям. Заметим, что из-за наличия шарнира
возможен перелом изогнутой оси в точке Е, так как сечения, примыкающие к шарниру поворачиваются на разные углы. Если не удается
построить изогнутую ось так, чтобы она удовлетворяла всем условиям, то следует искать ошибку. Эта проверка носит качественный характер и не всегда дает возможность найти ошибку в вычислениях.
Проверкой, подтверждающей правильность вычисления лишней неизвестной, является условие (4.29), то есть результатом перемножения
окончательной эпюры М с эпюрой изгибающих моментов от единичной обобщенной силы М1 (по правилу Верещагина) должен быть ноль.
Делая эту проверку, мы еще раз проверяем равенство нулю прогиба в
точке D в нашей задаче, поскольку смыслом этого перемножения является согласно методу Максвелла – Мора определение перемещения
по направлению обобщенной силы (прогиба в точке D в решаемой задаче). Проверим решение нашей задачи:
M M1
1 M a2
a
M
Ma 2 Ma 2
dx
a 2 a Ma
0.
EI
EI 4 2 3
6
4
12EI 12EI
4.3.2. Расчет статически неопределимой рамы
(задача № 24)
Условие задачи
В раме, показанной на рис. 4.40, требуется определить внутренние усилия и построить ось рамы после деформации. Жесткость всех
стержней рамы одинакова и равна EI.
Решение
Рассматриваемая рама является один раз статически неопределимой и для выбора основной системы требуется отбросить одну
лишнюю связь. Такой лишней связью будем считать шарнирно-
84
подвижную опору в точке В. Основная система с отброшенной
М=30 кН·м
лишней связью показана на
3м
рис. 4.41. Лишняя неизвестная, то
есть реакция в отброшенной лишF=20 кН
ней связи, обозначена буквой Х.
Условие совместности деформаций
для выбранной основной системы –
3м
это условие, приравнивающее нулю
горизонтальное перемещение точки
А
В: гор
B 0 . Это перемещение складывается из перемещения, вызван3м
ного всей заданной нагрузкой
гор
Рис. 4.40. Схема рамы с нагрузками B ( P ) , и перемещения от лишней
В
неизвестной гор
В Х
B ( X ) . Тогда условие
совместности деформаций запишем так:
М=30 кН·м
гор
гор
B ( P) B ( X ) 0 .
Будем искать перемещения метоF=20 кН
дом Максвелла – Мора с использованием правила Верещагина. Для этого построим три эпюры изгибающих моментов в основной системе: от заданной
нагрузки (рис. 4.42, а), от единичной сиА
лы, соответствующей горизонтальному
перемещению в точке В (рис. 4.42, б), и
от лишней неизвестной Х (рис. 4.42, в).
Для определения гор
B ( P ) перемножим
Рис. 4.41. Основная система
эпюры МР и М1:
M P M1
1
30 3
90 3
гор
(
P
)
dx
(
30
3
1
,
5
30
3
3
4
5)
B
EI
EI
2
2
1260
.
EI
85
б
а
в
В
1
Х
М=30 кНм
3м
F=20 кН
3м
3м
А
1
6
НА=20 кН
МА=90 кНм
30
Х
6Х
30
30
3
3
3Х
3Х
3
90
3Х
6
6Х
Эпюра МР
Эпюра МХ
Эпюра М1
Рис. 4.42. Эпюры изгибающих моментов: а – от заданной нагрузки;
б – от единичной силы; в – от лишней неизвестной Х
В Х=12,72 кН
12,72
30
М=30 кНм
F=20 кН
8,16
12,72
8,16
А
НА=7,28 кН
МА=13,68 кНм
8,16
7,28
Эпюра N
13,68
Эпюра Q
Эпюра М
Рис. 4.43. Окончательные эпюры внутренних усилий
86
Горизонтальное перемещение точки В от лишней неизвестной Х
M X M1
1 3X 3
3
гор
(
X
)
dx
[
2
3
X
3
3
(2 6 X 6 2 3 X 3
B
EI
EI
3
6
99 X
6 X 3 3 X 6)]
.
EI
Подставим найденные перемещения в условие совместности деформаций и найдем значение лишней неизвестной:
1260 99 X 0 , откуда X 12,72 кН.
Строим окончательные эпюры внутренних
усилий, приложив к основной системе все
нагрузки, включая найденное значение Х
(рис. 4.43). Выполним проверку, перемножив
эпюру М с эпюрой М1.
30 3
8,18 3
13,64 3
8,18 3
1
2 8,18 3 3
5
4
2
2
2
2
=147,24 – 147,3 0.
Изогнутая ось рамы, соответствующая
эпюре изгибающих моментов (рис. 4.43, г), и
условиям закрепления показана на рис. 4.44.
Рис. 4.44. Изогнутая Крестиками на рисунке отмечены точки перегиось рамы
ба оси.
87
4.4. РАСЧЕТ ПЛОСКОГО ТРУБОПРОВОДА
НА ТЕМПЕРАТУРНОЕ ВОЗДЕЙСТВИЕ И
ВНУТРЕННЕЕ ДАВЛЕНИЕ
Рекомендуемая литература
Камерштейн А. Г., Рождественский В. В., Ручинский М. Н. Расчет трубопроводов на прочность: Справочная книга. М.: Недра, 1969. Гл. 21, 27.
Основные определения
Известно, что в статически неопределимых стержневых конструкциях возникают напряжения в результате температурного воздействия. Температурные напряжения особенно велики в стержне,
защемленном по двум концам (см., например, решение задачи № 4 об
определении температурных напряжений [5]). Для уменьшения температурных напряжений в такого рода конструкциях (например, в
трубопроводах) используются температурные компенсаторы, которые
увеличивают свободу деформаций за счет изгиба. Температурные
компенсаторы представляют собой статически неопределимые рамы с
двумя заделками по концам (рис. 4.45). В данном разделе рассматривается расчет плоских статически неопределимых рам (плоских труа
б
Рис. 4.45. Температурные компенсаторы
бопроводов) на температурное воздействие по методу упругого центра. Предполагается, что стержни рамы соединены между собой
жестким образом под углом 90, все стержни имеют одинаковую
жесткость.
Рассматриваемые рамы являются три раза статически неопределимыми системами. Выберем основную систему для рамы, показанной на рис. 4.45, а, отбросив левую заделку (рис. 4.46). Лишними неизвестными являются реакции в защемлении: Х1, Х2 и Х3. В точке О
88
поместим начало декартовой системы координат хОy. Положительное
направление силы Х1 должно совпадать с направлением оси х, силы
Х2 – с направлением оси y. Положительное направление пары сил Х3
должно соответствовать направлению поворота оси х к оси y. Можно
показать, что решение канонической системы уравнений метода сил
для выбранной основной системы дает такие формулы для определения лишних неизвестных:
( I y C Lx I x C y C L y )
X1
TEI ;
(4.30)
I xC I yC I xC yC 2
X2
( I x C L y I x C y C Lx )
I xC I yC I xC yC 2
TEI ;
(4.31)
X 3 xc X 2 y c X 1 .
(4.32)
В этих формулах Т – изменение температуры; – коэффициент
линейного температурного расширения; EI – жесткость стержней раа
y
y
l4
X3
O
X1
X2
yc
б
l1
l2
l3
x
xc
X3
O
X1
X2
D
B C y
c
l3
l2
l1 A
xc l4
x
Рис. 4.46. К расчету трубопровода:
а – основная система;
б – точка С – упругий центр
мы; Lx, Ly – суммарные длины стержней рамы, параллельных осям х и
y. При вычислении длины стержня учитывается направление обхода
по длине стержня от начала координат. Если обход осуществляется по
направлению оси, то длина участка рамы считается положительной, в
противном случае – отрицательной. Например, для рамы, показанной
на рис. 4.46, Ly = 0, так как обход левой стойки рамы от начала координат происходит по направлению оси y, а обход правой стойки –
против направления оси.
89
Чтобы пояснить, что такое хс, yc, I x C , I y C и I x C y C , будем рассматривать раму как плоскую фигуру, состоящую из прямоугольников.
Одна сторона каждого прямоугольника равна длине участка рамы, а
другая сторона (толщина) всегда равна 1. Например, рама на рис. 4.46
считается плоской фигурой, состоящей из пяти прямоугольников с
длинами соответственно l1, l2, l3 и 2l4 и толщиной всех прямоугольников, равной 1. Тогда хс, yc – координаты центра тяжести этой плоской
фигуры в системе координат xОy. Центр тяжести фигуры (точка С на
рис. 4.46, б) называется упругим центром. Через упругий центр проведем центральные оси xc, yc, параллельные осям x, y. В формулах
(4.30), (4.31) I x C , I y C и I x C y C – осевые и центробежный моменты
инерции рассматриваемой плоской фигуры относительно центральных осей xc, yc.
Напомним некоторые формулы. Координаты центра тяжести
плоской фигуры находим так:
Sy
S
xc
; yc x ,
(4.33)
A
A
где А – площадь фигуры. В данном случае, так как толщина всех прямоугольников равна единице, площадь равна сумме длин всех участков рамы. Для рамы на рис. 4.46 A l1 l2 l3 2 l4 ; Sx, Sy – статические моменты фигуры относительно осей x, y, которые находятся
как суммы статических моментов каждого прямоугольника относительно осей x, y. Статический момент каждого прямоугольника равен
произведению площади прямоугольника на координату центра тяжести прямоугольника в системе координат хОy.
Моменты инерции плоской фигуры вычисляются как суммы моментов инерции простых фигур, составляющих данную фигуру, в рассматриваемом случае момент инерции всей фигуры равен сумме моментов инерций прямоугольников единичной толщины. Для каждого
прямоугольника справедливы формулы
(4.34)
I xпC I xп0 Aп a 2 ;
I пy C I пy 0 Aп b2 ;
(4.35)
90
I xпC y C Aп ab ,
(4.36)
где Aп h li – площадь прямоугольника ( 1 , h li ); a, b – координаты центра тяжести прямоугольника в системе координатных
осей xc, yc; I xп0 , I пy 0 – моменты инерции прямоугольника относительно
собственных центральных осей x0, y0, параллельных осям xc, yc. Если
ось x0 (или y0) расположена вдоль рассматриваемого участка трубопровода, то есть параллельна стороне прямоугольника li, то можно
считать I xп0 0 (или I пy 0 0 ). Если же ось x0 (или y0) перпендикулярна
li3
стороне li, то
. В формуле (4.36) учтено, что центробеж12
ный момент инерции прямоугольника I xп0 y 0 относительно собственI xп0
I пy 0
ных осей x0, y0 равен нулю, так как эти оси являются главными осями
инерции прямоугольника.
После определения величин лишних неизвестных по формулам
(4.30) – (4.32) строим эпюры внутренних усилий в основной системе,
как в обычной статически определимой раме. Эпюру изгибающих
моментов можно проверить следующим образом. В упругом центре
приложим найденные силы Х1 и Х2, нарисовав их в масштабе. Определим графически равнодействующую этих сил. Точки пересечения
линии действия этой равнодействующей с осью рамы – это точки, в
которых изгибающий момент должен равняться нулю (точки A, B, D
на рис. 4.46, б).
Построив эпюры внутренних усилий, проверим прочность конструкции, имея в виду, что поперечное сечение стержней рамы – труба и, кроме температурного воздействия, труба испытывает действие
внутреннего давления. Максимальные нормальные напряжения х,
действующие на площадках, перпендикулярных оси трубы, находим,
складывая напряжения от продольной силы и максимального изгибающего момента в опасном сечении рамы13:
При определении напряжений от изгиба на криволинейных участках
трубы в местах сопряжения вертикальных и горизонтальных стержней рамы не
13
91
N M max
.
(4.37)
A
W
Для проверки прочности трубы из пластичного материала по
формуле (4.37) находим максимальное по модулю напряжение. Если
труба выполнена из хрупкого материала, при проверке прочности важен знак напряжений. Кольцевое напряжение , возникающее от
внутреннего давления q, определяем по формуле
qR
,
(4.38)
где R и – соответственно внешний радиус и толщина трубы. Напряжение всегда растягивающее. На рис 4.47, а показана эпюра распределения напряжений х в опасном сечении при положительной
продольной силе. Рис. 4.47, б изображает напряженное состояние
опасных точек 1, 1. Так как касательные напряжения на площадках
x
а
cmax
1
Mmax
б
1
Mmax
x
q
N
N
1
рmax
1
cmax
рmax
Рис. 4.47. К определению напряжений в трубе:
а – распределение напряжений х в опасном сечении;
б – напряженное состояние опасных точек
элементов, показанных на рис. 4.47, б, отсутствуют, то эти площадки
являются главными. Проверку прочности в опасных точках осуществляем по теории прочности, соответствующей материалу трубы.
учитываем эффект Кармана, связанный со сплющиванием поперечного сечения
трубы и приводящий к уменьшению изгибных напряжений.
92
Пример расчета трубопровода (задача № 26)
Условие задачи
Трубопровод, показанный на рис. 4.48, а, нагревается на Т градусов и подвержен действию внутреннего давления q. Труба имеет
внешний радиус поперечного сечения R и толщину . Известен материал трубы. Требуется найти напряженное состояние и обеспечить
выполнение условия прочности трубопровода.
Решение
l4=1м
а
б
y
y
X2
l3=2м
X3
X1
l2=2м
4
yc
xc
O
l1=1м
в
х
3
O
1
C
yc
х
хc
2
Рис. 4.48. К примеру расчета трубопровода: а – заданная система;
б – основная система;
в – положение упругого центра
Выберем основную систему, отбросив левое закрепление и приложив реактивные силы (лишние неизвестные) Х1, Х2 и Х3
(рис. 4.48, б). Для определения значений лишних неизвестных по
формулам (4.30) – (4.32) найдем сначала положение упругого центра и
геометрические характеристики I x C , I y C и I x C y C .
Координаты упругого центра в системе координат xОy сосчитаем
по формулам (4.33), где
A l1 l2 l3 l4 6 м.
Статический момент относительно оси х равен сумме статических моментов четырех прямоугольников единичной толщины:
93
S x S x(1) S x( 2) S x(3) S x( 4) .
Статический момент третьего участка трубопровода (третьего
прямоугольника) S x(3) 0 , так как центр тяжести этого прямоугольника лежит на оси х, а статические моменты остальных прямоугольников найдем следующим образом:
S x(1) l1 ( l1 / 2) 1 ( 0,5) 0,5 м2,
где l1 1 l1 – площадь первого прямоугольника, а (– l1 / 2 ) – координата центра тяжести. Аналогично
S x( 2) l2 ( l1 ) 2 ( 1) 2 м2,
S x( 4) l4 l3 / 2 1 1 1 м2.
Таким образом,
1,5
0,250 м.
6
Вторая координата упругого центра
0 2 1 2 2 1 2,5
xc
1,42 м.
6
Отложим эти координаты на рисунке и покажем точку С – упругий центр. Проведем через точку С центральные оси xc, yc
(рис. 4.48, в). Найдем моменты инерции фигуры относительно этих
осей. Момент инерции относительно оси хс равен сумме моментов
инерции четырех прямоугольников:
I x C I x(1) I x( 2 ) I x( 3) I x( 4 ) .
yc
C
C
C
C
Сосчитаем момент инерции первого прямоугольника относительно оси хс по формуле (4.34). Для рассматриваемого прямоугольника собственная ось х0 перпендикулярна стороне l1, поэтому первый
член в (4.34) (момент инерции первого прямоугольника собственной
оси х0 ) не равен нулю. Таким образом, момент инерции относительно
оси хс
l13
13
(1)
(1) 2
Ix
A a(1) 1 0,252 0,146 м3.
C
12
12
Для второго прямоугольника момент инерции относительно
оси хс
94
I x( 2) A( 2) a(22) 2 0,752 1,125 м3.
C
Поскольку ось х0 параллельна стороне прямоугольника l2, то первое слагаемое в формуле (4.34) отсутствует ( I x( 2 ) 0 ). Аналогично
0
находим моменты инерции остальных прямоугольников:
23
( 3)
Ix
2 0,252 0,792 м3;
C
12
I x( 4 ) 1 1,252 1,562 м3.
C
I xC
И полный момент инерции относительно оси хс равен
3,625 м3. Так же вычислим момент инерции относительно оси yc
каждого прямоугольника:
I (y1) A(1) b(21) 1 1,422 2,016 м3;
C
I (y2)
C
l2 3
23
( 2)
2
A b( 2)
2 0,422 1,020 м3;
12
12
I (y3) A( 3)b(23) 2 0,582 0,673 м3;
C
l4 3
13
( 4)
2
A b( 4) 1 1,082 1,249 м3.
12
12
Полный момент инерции относительно оси yc равен сумме моментов инерции всех прямоугольников I y C 4,958 м3.
I (y4)
C
Найдем центробежный момент инерции. Момент инерции каждого прямоугольника определим по формуле (4.36). Обратим внимание на то, что, если при вычислении осевых моментов инерции знаки
координат а и b можно опускать, так как они входят в формулы (4.34),
(4.35) в квадрате, то при вычислении центробежного момента инерции
эти знаки следует обязательно учитывать. Тогда
I x(1)y 1 ( 0,25) ( 1,42) 0,355 м3;
C
C
I x( 2)y 2 ( 0,75) ( 0,42) 0,630 м3;
C
C
I x( 3)y 2 0,25 0,58 0,29 м3;
C
C
I x( 4)y
C C
1 1,25 1,08 1,35 м3.
95
Полный центробежный момент инерции I x C y C 2,625 м3.
Длины трубопровода вдоль осей х и y: L x 3 м, L y 1 2 1м.
Подставляя найденные геометрические характеристики в формулы
(4.30)–(4.32), сосчитаем значения лишних неизвестных:
X1
1,58 м–2;
TEI
X2
1,04 м–2;
TEI
X3
1,87 м–1.
TEI
Нарисуем основную систему и приложим в точке О найденные
опорные реакции. Так как все лишние неизвестные оказались положительными, то сохраняем выбранное ранее направление всех неизвестных (рис. 4.49, а). Построим эпюры продольных сил и изгибающих
моментов в долях от TEI (рис. 4.49, б, в). На рис. 4.49, в показана
равнодействующая сил Х1 и Х2, приложенных в упругом центре. Видl4=1м
l4=1м
а
б
в
1,58
X2=1,04
X3=1,87
l1=1м
О
l3=2м
1,37
yc
1,87
1,04
X1=1,58
хc
C
1,04
l2=2м
0,33
0,29
1,58
1,79
Рис. 4.49. Определение внутренних усилий в трубопроводе:
а – основная система с найденными реакциями в долях от TЕI;
б – эпюра продольных сил N в долях от TЕI;
в – эпюра изгибающих моментов М в долях от TЕI
но, что на линии действия этой равнодействующей изгибающий момент равен нулю.
Теперь можно решать вопрос о проверке прочности трубы. По
эпюрам N и М находим опасное сечение. У нас это сечение в точке О
96
(рис. 4.49, а). 14 В этом сечении действуют одновременно максимальный изгибающий момент и растягивающая продольная сила:
M max 1,87TEI , N 1,04TEI . Напряжения в опасных точках
вычисляем по формулам (4.37) и (4.38). Для удобства расчетов приведем формулу (4.37) к другому виду. Максимальное напряжение от изгиба
M max 1,87TEI
M
max
1,87TER ,
W
W
так как момент сопротивления W I R . Нормальное напряжение, вызванное продольной силой, найдем так:
N 1,04TEI
R2
r
N
1,04TE
[1 ( ) 2 ] ,
A
A
4
R
где учтено, что для трубы
r
R 4 r 4 R 4
r
I
[1 ( ) 4 ] , A R 2 r 2 R 2 [1 ( ) 2 ] ,
R
4
4
4
R
r – внутренний радиус трубы. Суммарные напряжения на площадках,
перпендикулярных оси х, находим согласно (4.37), складывая N и
M
.
max
Отметим особенность решаемой задачи об определении температурных напряжений в статически неопределимой раме: чем больше
размер поперечного сечения (больше радиус трубы), тем больше возникающие в конструкции температурные напряжения. Это связано с
тем, что с увеличением радиуса увеличивается жесткость рамы и
уменьшается свобода деформаций, что и приводит к увеличению
напряжений.
Вычисляя напряжения в опасных точках, обратите внимание на
единицы измерения величин, входящих в формулы для напряжений. В
M
формуле для определения max
число 1,87 имеет размерность м–1, в
формуле для N число 1,04 измеряется в м–2. Таким образом, подставляя R в метрах, получим величину напряжения в тех же единицах
В рассматриваемом примере опасным сечением может быть также сечение, в котором действуют усилия M 1,79TEI и N 158
, TEI .
14
97
измерения, что и модуль упругости Е. При проверке прочности в
опасных точках трубы используйте знания, полученные при изучении
разд. 2 "Исследование плоского напряженного состояния. Проверка
прочности для сложного напряженного состояния" [5]. Если условие
прочности выполняться не будет, следует уменьшить радиус трубы и
добиться удовлетворения условия прочности.
98
4.5. ОПРЕДЕЛЕНИЕ НАПРЯЖЕНИЙ И ДЕФОРМАЦИЙ
В КРИВОЛИНЕЙНОМ СТЕРЖНЕ
Рекомендуемая литература
Александров А. В., Потапов В. Д., Державин Б. П. Сопротивление материалов. М.: Высш. шк., 1995. Гл. 2 (§ 2.6), гл. 6 (§ 6.10).
Гастев В. А. Краткий курс сопротивления материалов. М.: Физматгиз,
1977. Гл. 11 (§ 46, 47).
Дарков А. В., Шпиро Г. С. Сопротивление материалов. М.: Высш. шк.,
1989. Гл. 10 (§ 10.1–10.3).
Беляев Н. М. Сопротивление материалов. М., 1976.§ 132–139.
Основные определения
В плоском криволинейном стержне так же, как в плоской раме,
состоящей из прямолинейных стержней, возникает три внутренних
усилия: N, Q и М. Процесс определения внутренних усилий в криволинейном стержне тот же, что и в раме. Особенность состоит в новом
правиле знаков для изгибающего момента: изгибающий момент
считается положительным, если он увеличивает кривизну стержня15.
Правила знаков для продольной и поперечной сил те же, что и при их
определении в плоских рамах.
При чистом изгибе в криволинейных стержнях возникают нормальные напряжения, которые вычисляются по формуле
M z0 z
,
(4.39)
Az 0 R z
где R – радиус кривизны оси стержня; z 0 – величина смещения
нейтральной оси от главной центральной оси сечения в сторону центра кривизны (точка С на рис. 4.50); z – координата той точки, в которой мы ищем напряжения в главной центральной системе координат.
Для того, чтобы формула (4.39) при определении напряжений праЕсли рассматриваемый стержень имеет и прямолинейный, и криволинейный участки, то для того, чтобы не было противоречия из-за разного правила знаков для изгибающего момента в прямолинейной и криволинейной частях
стержня, принято строить эпюру изгибающего момента со стороны растянутых
волокон без определения знака.
15
99
вильно давала знак напряжений, ось z следует направлять в сторону
от центра кривизны. Формула (4.39) показывает, что нормальные
напряжения в поперечном сечении криволинейного стержня распределяются не по линейному закону, как в прямолинейном стержне, а по
гиперболическому. Эпюра нормальных напряжений в криволинейном
стержне при чистом изгибе показана на рис. 4.50.
Для определения величины z 0 существуют разные пути. Будем
делить криволинейные стержни в
z
M
зависимости от отношения R c
y
(где с – расстояние от центра тяz0
жести сечения до крайнего внутреннего волокна) на стержни
Эпюра
R
большой
( R c 4 ),
средней
С
( 4 R c 10 ) и малой кривизны
Рис. 4.50. Распределение напряжений
( R c 10 ). Для стержней большой
в сечении кривого бруса при чистом
кривизны при определении z 0 реизгибе
комендуем использовать точные
формулы для простых форм сечений (прямоугольник, круг), полученные в [2, § 46]. Если поперечное сечение имеет более сложную форму,
то при определении величины z 0 для стержней большой и средней
кривизны можно использовать либо приближенные формулы [2, § 46],
либо таблицы, приведенные в [7, § 139]. Для стержней малой и средней кривизны допустимо использовать приближенную формулу
Iy
z0
.
(4.40)
RA
Если в сечении, кроме изгибающего момента, действует продольная сила, то в формулу (4.39) добавляется слагаемое N A . Касательные напряжения от поперечной силы в практических расчетах для
криволинейных стержней обычно не учитывают.
Для определения перемещений точек оси криволинейных стержней большой кривизны используется метод Максвелла – Мора, согласно которому обобщенное перемещение i находится по формуле
[2]
100
NN i
MM i
NM i MN i
(4.41)
ds
ds
ds ,
EA
EAz 0 R
EAR
где N, M – продольная сила и изгибающий момент от заданной
нагрузки, N i , M i – продольная сила и изгибающий момент, вызванные обобщенной силой, соответствующей искомому перемещению.
Интегрирование ведется по длине дуги оси стержня ( ds – дифференциал дуги). Для криволинейных стержней малой и средней кривизны
допустимо определять перемещения по формуле Максвелла – Мора
для прямолинейных стержней, заменяя dx на ds :
NN i
MM i
i
ds
ds .
(4.42)
EA
EI
Видно, что формула (4.41) отличается от формулы Максвелла – Мора
для прямолинейных стержней (4.42) знаменателем второго слагаемого
( EAz 0 R вместо EI ) и наличием третьего слагаемого. Влияние поперечной силы на перемещения в обеих формулах не учитывается.
i
Пример расчета криволинейного стержня (задача № 27)
Условие задачи
Рассмотрим стержень, показанный на рис. 4.51. Определим максимальные нормальные напряжения в криволинейной части стержня,
если
R 2 м,
l 2 м,
F
F 40 кН,
M 40 кНм.
Стержень имеет прямоугольR
М
ное поперечное сечение с выh
сотой h 0,4 R 0,8 м, отноR
R
l
шение h b 2 . Найдем также
b
горизонтальное перемещение
Рис. 4.51. Схема стержня с нагрузками
левой подвижной опоры.
101
Решение
Прежде всего, построим эпюры внутренних усилий в стержне.
Сначала определим опорные реакции обычным путем, составляя три
уравнения равновесия. Найденные опорные реакции показаны на
рис. 4.52. Для определения внутренних усилий рассечем стержень на
трех участках. На пряF=40кН
молинейной части фиксируем сечение коордих
M=40кН·м
2 HB=40кН натой х, на криволиней1
A
B
ной части – углом
(см. рис. 4.52). В соотRA=20кН
RB=20кН
ветствии с методом сечений находим усилия,
Рис. 4.52. Определение внутренних усилий
рассматривая все силы с
одной стороны от сечения:
участо к 1: 0 x l ;
N ( x) 0 ;
Q( x ) R A 20 кН;
M ( x ) M R A x 40 20 x ;
участо к 2: 0 1 2 ;
N (1 ) R A cos 1 20 cos 1 ;
Q(1 ) R A sin 1 20 sin 1;
M (1 ) M R A l R(1 cos 1 ) 40(1 cos 1 ) ;
участо к 3: 0 2 2 ;
N ( 2 ) RB cos 2 H B sin 2 20 cos 2 40 sin 2 ;
Q( 2 ) RB sin 2 H B cos 2 20 sin 1 40 cos 2 ;
M (2 ) RB R(1 cos 1 ) H B R sin 2 40(1 cos 2 )
80 sin 2 .
По этим выражениям строим эпюры N, Q и М. В криволинейной
части стержня считаем величины усилий, задавая значения 1 (или
2 ) через определенные промежутки (например, через 30°). Внесем
результаты вычислений в таблицу (табл. 3).
102
Таблица 3
Пределы
изменения х
( ) на участке
Участок 1:
0 x 2м
Участок 2:
0 1 / 2
Участок 3:
0 2 / 2
Значение
х ( ),
м (град)
0
2
0
30
60
90
0
30
60
90
N,
кН
Q,
кН
M,
кНм
0
0
20
17,3
10
0
– 20
– 37,3
– 44,6
– 40
– 20
– 20
0
– 10
– 17,3
– 20
40
24,6
2,7
– 20
40
0
0
5,4
20
40
0
34,6
49,2
40
Отложим значения усилий в криволинейной части стержня в радиальном направлении, соединим ординаты плавными кривыми и получим эпюры N, Q и М (рис. 4.53). Эпюры штрихуем в радиальном
направлении. Заметим, что так же, как и в прямолинейных стержнях,
в сечении, где Q = 0, на эпюре М имеет место экстремум. Найдем экстремальное значение момента:
Q(*) 20 sin * 40 cos * 0 ,
отсюда * arctg2 6330 .
M max 40(1 cos 6330) 80 sin 6330 49,4 кНм.
В сечении 2 * 6330 действует так же продольная сила
N = – 44,7 кН.
Построим эпюру нормальных напряжений, определив значения
напряжений в трех точках (a, b, c на рис. 4.54) опасного сечения по
формуле (4.39), добавив в нее напряжения от продольной силы. Так
как рассматриваемый криволинейный стержень является стержнем
средней кривизны (R/c = R.2/h = 4/0,8 = 5), то допустимо искать величину z 0 по приближенной формуле (4.40)
bh 3 0,4 0,83
Iy
0,01707м4;
12
12
103
10
17,3
20
44,6
40
17,3
Эпюра N
2,7
24,6
10
37,3
20
20
20
Эпюра Q
6330
40
40 Mmax=49,4
49,2
20
5,4
40
34,6
Эпюра M
6330
Рис. 4.53. Эпюры внутренних усилий
A bh 0,32 м2;
0,01707
z0
0,0267 м. 16
0,32 2
В точке a координата z 0,4 м и напряжение в этой точке
N M z0 z
44,7
49,4
0,0267 0,4 4
a
(
)10
A Az 0 R z
0,32 0,32 0,0267 2 0,4
= (– 140 + 1027)10–4 = 0,0887 кН/см2.
Аналогично в точке b z 0,4 м и
44,7
49,4
0,0267 0,4 4
b (
)10 (140 1349)10 4
0,32 0,32 0,0267 2 0,4
= – 0,149 кН/см2.
Наконец, в точке с, находящейся в центре тяжести сечения, напряжение
Отметим, что по точной формуле, приведенной в [2, § 46], величина
z 0 = 0,0269 м.
16
104
44,7
49,4
0,0267 4
)10 0,00628кН/см2.
0,32 0,32 0,0267 2
Эпюра напряжений построена на рис. 4.54.
c (
z
0,887
a
h/2=0,4 м
c
y
0,0628
h/2=0,4 м
b
1,49
Эпюра , МПа
Рис. 4.54. Эпюры напряжений в опасном сечении:
– по формуле для криволинейных стержней;
– по формуле для прямолинейных стержней
м3;
Найдем напряжения
в точках а и b по формуле
для
прямолинейных
стержней
N M
a ,b max
A
Wy
и сравним их с напряжениями, вычисленными по
формуле для криволинейных стержней.
bh 2 0,4 0,82
Wy
0,0427
6
6
44,7
49,4
140 1157 1017 кН/м2 = 0,102 кН/см2;
0,32 0,0427
44,7
49,4
b
140 1157 1297 кН/м2 = – 0,130 кН/см2.
0,32 0,0427
Разница между напряжениями, вычисленными по разным формулам,
составляет около 15 %. Напомним, что в рассматриваемом стержне
отношение R c 5 . Разница между напряжениями, вычисленными по
разным формулам, уменьшается с увеличением отношения R c . Для
стержней малой кривизны ( R c 10 ) можно вычислять по теории
прямолинейных стержней.
Найдем теперь горизонтальное перемещение левой опоры. Для
этого приложим в точке А горизонтальную единичную силу
(рис. 4.55), найдем опорные реакции и запишем выражения для продольной силы и изгибающего момента, вызванных этой единичной
силой, на каждом участке:
участо к 1: 0 x l ;
a
105
N1 ( x ) 1 ;
M1 ( x) 0 ;
участо к 2: 0 1 2 ;
N1 (1 ) 1sin 1 ;
M 1 (1 ) 1 R sin 1;
участо к 3: 0 2 2 ;
N1 ( 2 ) 1sin 2 ;
M 1 ( 2 ) 1 R sin 2 .
При определении перех
мещений используем форму2
HB=1
лу (4.42) для прямолинейных 1 A
1
B
стержней. Подставим в нее
RA=0
RB=0
выражения для продольной
Рис. 4.55. Стержень под действием
силы и изгибающего момента
единичной силы, соответствующей
от заданной нагрузки и от
горизонтальному перемещению точки А
единичной силы и, принимая
во внимание, что на прямолинейном участке интеграл в рассматриваемом примере равен нулю и ds Rd , получим
1 /2
гор
a
20 cos 1 ( 1) sin 1Rd1
EA 0
1 /2
40(1 cos 1 ) R sin 1Rd1
EI 0
1 /2
20(cos 2 2 sin 2 )( 1) sin 2 Rd 2
EA 0
1 /2
40[(1 cos 2 ) 2 sin 2 ]R sin 2 Rd 2 .
EI 0
Используя известные значения определенных интегралов
/2
/2
/2
0
0
0
sin d 1 ;
/2
cos d 1 ;
sin d / 4 ;
2
0
2
cos d / 4 ;
/2
sin cos d 1 / 2 ,
0
найдем
гор
A
20 80 82,8 171,2 62,8 251,2
.
EA EI EA
EI
EA
EI
106
Как легко выяснить, числитель первого слагаемого измеряется в
кНм, а числитель второго – в кНм3. Найдем жесткости стержня при
растяжении и изгибе:
EA 2 104 0,32 104 0,64 108 кН;
EI 2 104 0,01707 108 3,41 1010 кНсм2
и сосчитаем горизонтальное перемещение точки А:
62,8 102 251,2 106
гор
A
= 10–4(0,98 + 73,66) =
6
10
64 10
3,41 10
= 74,610-4см.
Первое слагаемое в сумме показывает вклад продольной силы в
перемещение. Видно, что он незначителен.
В заключение найдем горизонтальное перемещение точки А по формуле
для криволинейных стержней (4.41). Сосчитаем значение третьего интеграла в
(4.41):
/2
( NM1 N1 M ) Rd 20 cos1 R sin 1 Rd1
0
/2
/2
0
/2
0
40(1 cos1 )( 1) sin 1 Rd1
20(cos 2 2 sin 2 ) R sin 2 Rd 2
40[(1 cos 2 ) 2 sin 2 ]( 1) sin 2 Rd 2 = – 251,2 кНм2.
0
Таким образом, по формуле для криволинейных стержней
гор
A
62,8
EA
251,2
EAz0 R
251,2 10
251,2
EAR
4
10
62,8 10
64 10
4
251,2 10
2
6
6
2 10 0,32 0,0267 2 10
4
(0,98 73,50 1,96) 72,5 10
4
8
см.
2 10 0,32 2 10
Полученный результат показывает, что влияние кривизны стержня на перемещение меньше 3 % и значительно меньше, чем влияние на напряжения.
Поэтому для стержней малой и средней кривизны при определении перемещений можно использовать формулу Максвелла – Мора, относящуюся к прямолинейным стержням и учитывающую влияние на перемещения только изгибающего момента.
4
6
107
СПИСОК ЛИТЕРАТУРЫ
Основная
1. Александров А. В., Потапов В. Д., Державин Б. П. Сопротивление материалов. М.: Высш. шк., 1995.
2. Гастев В. А. Краткий курс сопротивления материалов. М.: Физматгиз,
1977.
3. Дарков А. В., Шпиро Г. С. Сопротивление материалов. М.: Высш. шк.,
1989.
4. Сопротивление материалов: Метод. указания и схемы заданий к расчетно-графическим работам для студентов всех специальностей / СПбГАСУ;
Сост: И. А. Куприянов, Н. Б. Левченко, Г.С. Шульман. СПб., 2010.
5. Сопротивление материалов: Учебное пособие по выполнению расчетно-графических работ. Ч. 1. / Н. Б. Левченко, Л. М. Каган-Розенцвейг,
И. А. Куприянов, О. Б. Халецкая. СПбГАСУ; СПб., 2011.
Дополнительная
6. Камерштейн А. Г., Рождественский В. В., Ручинский М. Н. Расчет трубопроводов на прочность: Справочная книга. М.: Недра, 1969.
7. Беляев Н. М. Сопротивление материалов. М., 1976.
108
СОДЕРЖАНИЕ
Общие указания по выполнению расчетно-графических работ.......................
Используемые обозначения........................................................................................
4. ИЗГИБ....................................................................................................................
4.1. Расчет статически определимых балок.....................................................
Примеры решения задач.......................................................................................
4.1.1. Определение внутренних усилий в балках (задачи № 12–15)..............
Пример 1............................................................................................................
Пример 2............................................................................................................
4.1.2. Проверка прочности балок при плоском поперечном изгибе (задачи № 16–19).......................................................................................................
Пример 1...........................................................................................................
Пример 2. .........................................................................................................
Пример 3...........................................................................................................
4.1.3. Определение перемещений и проверка жесткости балок (задачи № 19, 20)........................................................................................................
Примеры решения задач
Определение перемещений в балках аналитическим способом....................
Определение перемещений в балках методом Максвелла – Мора................
4.2. Расчет статически определимых рам........................................................
Примеры решения задач...................................................................................
4.2.1. Определение внутренних усилий в рамах (задачи № 21, 22)...............
4.2.2. Определение перемещений в рамах (задачи № 21, 22).........................
4.3. Расчет статически неопределимых балок и рам......................................
Примеры решения задач...................................................................................
4.3.1. Расчет статически неопределимой балки (задача № 23).......................
4.3.2. Расчет статически неопределимой рамы (задача № 24).......................
4.4. Расчет плоского трубопровода на температурное воздействие и
внутреннее давление.........................................................................................................
Пример расчета трубопровода (задача № 26)......................................................
4.5. Определение напряжений и деформаций в криволинейном
стержне...
Пример расчета криволинейного стержня (задача № 27)...................................
Список литературы.....................................................................................................
109
Нина Борисовна Левченко
СОПРОТИВЛЕНИЕ МАТЕРИАЛОВ
Часть 2
Редактор
Корректор К.И. Бойкова
Компьютерная верстка И.А. Яблоковой
ЛР № 020282 от 24.12.96
Подписано к печати. Формат 60х84 1/16. Бум. офсетная.
Усл. печ. л. . Уч.-изд. л. . Тираж 500. Заказ . "С"
Санкт-Петербургский государственный архитектурно-строительный
университет. 198005, Санкт-Петербург, 2-я Красноармейская ул., д. 4.
Отпечатано на ризографе. 198005, Санкт-Петербург, 2-я Красноармейская ул., д. 5.