УДК 621.316.7 Белов Денис Владимирович магистрант группы АУ-1-М-09 Научный руководитель:
advertisement

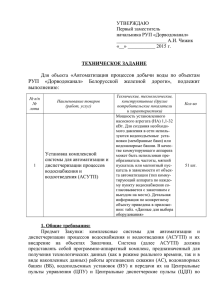
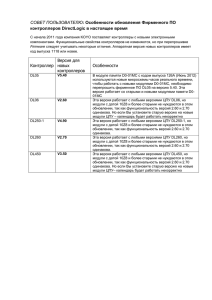
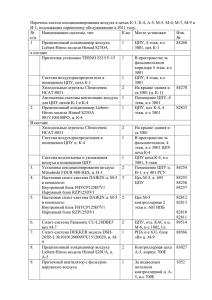
УДК 621.316.7 Белов Денис Владимирович магистрант группы АУ-1-М-09 Научный руководитель: Грошев Валерий Александрович доц., к.т.н. Московский государственный горный университет ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛОВЫХ ПЕРЕМЕЩЕНИЙ ДЛЯ ОПРЕДЕЛЕНИЯ КООРДИНАТ ПОЛОЖЕНИЯ КОВША ЭКСКАВАТОРА-ДРАГЛАЙНА DIGITIZER OF ANGULAR MOVINGS FOR DEFINITION OF COORDINATES OF POSITION OF A LADLE OF A DREDGEDRAGLINE Растущий уровень автоматизации управления и контроля различными объектами и массовое применение при этом микропроцессорных систем и ПК определили широкое развитие цифровых преобразователей угла (ЦПУ) одного из ведущих классов аналого-цифровых преобразователей информации, От качества ЦПУ во многом зависит уровень технических характеристик и эффективность функционирования автоматических систем, в которых они применяются, например, в системах числового программного управления металлорежущими станками, координатно-отсчетных устройствах для аварийной системы защиты рабочего оборудования экскаватора-драглайна и роботизированных системах. Одним из наиболее перспективных и широко применяемых в настоящее время типов ЦПУ являются ЦПУ с прямым преобразованием фазы в код (ЦПУ ППФК), в которых в качестве первичных преобразователей угла используются фазовращатели на основе сельсинов, вращающихся трансформаторов, индуктосинов, растровых решеток и др [1]. В настоящее время известны три разновидности классического ЦПУ ППФК: с преобразованием фазового сдвига между двумя синусоидальными напряжениями во временной интервал и заполнением его импульсами эталонной частоты с последующим их подсчетом счетчиком в определенной системе счисления; с получением временного сигнала кодовой маски и считыванием кода в определенные моменты времени; с преобразованием фазового сдвига во временной интервал и квантованием приращений этого интервала с помощью временной импульсной последовательности. Для разработки цифрового преобразователя угла вала во временной интервал использовался метод с преобразованием фазового сдвига во временной интервал и квантованием приращений этого интервала с 6 помощью временной импульсной последовательности, который обладает следующими преимуществам: простота осуществления многоканального преобразования; простота соединения первичного преобразователя угла с электронной схемой; возможность создания для электронной схемы комфортных условий; высокий уровень унификации и технологичности; высокая помехозащищённость и точность преимущественно за счёт фазового параметра; Для повышения статической точности отсчетной части ЦПУ ППФК использовался метод автоматической коррекции систематических и случайных погрешностей. Суть данного алгоритма состоит в обработки сигнала методом цифрового интегрирования для которого используются qв выборок из результатов преобразования ЦПУ ППФК, в каждой из которых получается некоторое значение выходного кода Nк. При цифровом интегрировании на выходе ЦПУ ППФК происходит суммирование этих кодов, и деление этой суммы на qв. Известно, что дисперсия погрешности при цифровом интегрировании в qв раз меньше дисперсии единичного результата [1] . На рис.1 приведена структурная схема разработанного цифрового преобразователя угла поворота вала во временной интервал с усреднением результатов измерения методом цифрового интегрирования. Рис.1 Преобразователь работает следующим образом. Генератор импульсов (ГИ) вырабатывает прямоугольные импульсы типа "меандр" с частотой 7 1МГц, поступающие на входы делителей частоты (ДЧ) ДЧ1 и ДЧ2. ДЧ 1 осуществляет деление этой частота на 256, а ДЧ2 на 3. С выхода ДЧ1 на вход фазорасщепителя (ФР) поступают прямоугольные импульсы с частотой 1МГц/256. ФР. также осуществляет деление частоты этих импульсов на 6, и на его трех выходах образуется трехфазная система прямоугольных импульсов типа "меандр", сдвинутых друг относительно друга на треть периода, с частотой 1 МГц/1536. С помощью усилителя мощности (УМ) импульсы на выходе ФР усиливаются и записываются в роторные обмотки фазовращателей (ФВ) ФВ1 и ФВ2. В качестве ФB1 и ФВ2 используются стандартнее бесконтактные сильсины типа БД404Н Кл. 1, работающие в режиме фазовравщателей с круговым вращающимся магнитив полем. На выходах ФВ1 и ФВ2 образуется "квазигармонические" сигналы. Фильтры (Ф) Ф1 и Ф2, включенные к статорным обмоткам сельсинов, выделяет первые гармоники "квазигармонические" сигналов, несущие информацию об угловых положениях роторов ФВ1 и ФВ2. Нуль-органы (НО) Н01 и Н02 выделяют переходы гармонических сигналов с Ф1 и Ф2 при переходе их через нулевые положения с положительным градиентом). Частота гармонических сигналов на выходах Ф1 и Ф2 равна 651 Гц. Прямоугольные импульсы типа "меандр" с выходов H01 и Н02 поступают на вторые входы преобразователей фазы во временной интервал (ПФВИ) ПФВИ1 и ПФВИ2, на первые «входы которых поступают прямоугольные опорные импульсы с выхода ДЧ2 с частотой 1 МГц/3. На третьи входы ПФВИ1 и ПФВИ2 поступают прямоугольные опорные импульсы с третьего выхода ФР частота которых равна 651 Гц. На четвертые входы ПФВИ1 и ПФВИ2 поступают импульсы "Запрет" с выхода схемы управления (СУ). С выходов ПФВИ1 и ПФВИ2 на входы двоичных счетчиков импульсов СТ21 я СТ22 поступают на восемь пачек прямоугольных импульсов с частотой 1 МГц/3. Число импульсов в каждой пачке пропорционально угловым положениям роторов ФВ1 и ФВ2 ( α1 и α2 ). CT21 и СТ22 подсчитывают число импульсов в восьми пачках, после этого под воздействием сигнала "Запись" СУ происходит запись результатов измерения из СТ21 и СТ22 в регистры (Per.) Per.1 и Per.2.При этом результаты переписываются без учета трех младших разрядов CT21 и СТ22, что автоматически приводит к делению (усреднению) результатов измерения за восемь циклов на восемь. Блоки индикации (БИ) БИ1 и БИ2 осуществляют индикацию Per.1 и Per,2 в двоичном коде. При создании новых типов ЦПУ ППФК важнейшей задачей является выбор наиболее рациональной структурной схемы из большого числа существующих или вновь предлагаемых. Для решения этой важнейшей задачи были разработаны удобные для практики модели оценки статической точности ЦПУ ППФК на этапе структурного проектирования. Под статической погрешностью ЦПУ ППФК будем понимать полную погрешность преобразования E= E1+E2, выраженную в единицах входной угловой величины, E1- погрешность квантования по уровню, E2- погрешность воспроизведения уровней квантования. Статическая точность ЦПУ ППФК характеризуется величиной погрешности. Эта погрешность образуется из 8 различных составляющих как систематических, так и случайных. Исключать систематическую составляющую погрешности с помощью коррекции можно лишь тогда, когда она намного превышает случайную составляющую[3]. На основе проведённого анализа были получены следующие соотношения: 1) установлены аналитические зависимости, связывающие между собой среднеквадратичные случайные погрешности основных узлов и всего ЦДУ ППФК в целом, позволяющие на этапе структурного проектирования ЦПУ ППФК определить его статическую точность, если известны точностные параметры его основных узлов, либо определить требования к точности его основных узлов, если задана точность всего ЦПУ ППФК; накопительного типа; последовательного типа; - период частоты генератора - суммарная фазовая погрешность БП, ФВ, фильтров, линии связи и др; - коэффициент деления делителя частоты; – временная погрешность соответственно НО1 и НО2 2) получены зависимости СКП от СКП рис.2 – для ЦПУ ППФК ЦПУ ППФК последовательного типа; для накопительного типа; 3) установлена теоретическая зависимость P(E) от параллельного и рис.3; Рис.2 Рис.3 Разработанный двухканальный цифровой преобразователь угла поворота вала в код, может использоваться в составе системы аварийной 9 защиты рабочего оборудования экскаватора-драглайна, как первичный преобразователь для измерения длин подъёмных и тяговых канатов. Аналитические зависимости полученные в результате исследования могут применяться на практике для оценки статической точности ЦПУ ППФК на этапе структурного проектирования, что позволит определить статическую точность ЦПУ ППФК в целом, если известны точностные параметры его основных узлов, либо определить требования к их точности. Литература 1. Домрачеев В.Г., Мейко Б.Р. Цифровые преобразователи угла: Принципы построения, теория точности, методы контроля. – М.: Энергоатомиздат, 1989. – 380 с. 2. Высокоточные угловые измерения / Д.А. Аникст, К.М. Константинович, И.В. Меськин и др., под ред. Ю.Г. Якушенкова. – М.: Машиностроение, 1987. – 480 с. 3. Основы метрологии и организации метрологического контроля / Д.А.Иванников, Е.Н.Фомичев: учебное пособие. – Н.Новгород: Изд-во НГТУ, 2006. – С. 47. Аннотация В данной статье рассмотрены особенности построения цифровых преобразователей угла поворота вала подъёмных и тяговых механизмов экскаватора-драглайна с использованием алгоритма преобразования уголфаза-временной интервал-код. Рассмотрена методика оценки статической точности ЦПУ ППФК на этапе структурного проектирования. In given article features of construction of digitizers of an angle of rotation of a shaft in a code with use of algorithm of transformation a corner-phase-time an interval-code are considered. The technique of an estimation of static accuracy digital converter of the angle of at a stage of structural designing is considered. Ключевые слова цифровой, преобразователь, угол, фаза, код, аварийный режим, экскаватор-драглайн, погрешность, статическая, точность, digital, the converter, a corner, a phase, a code, emergency operation, dragline excavator, an error, static, accuracy 10