СОВМЕЩЕНИЕ ЭКСТРЕМАЛЬНОГО И ОПТИМИЗАЦИОННОГО
advertisement

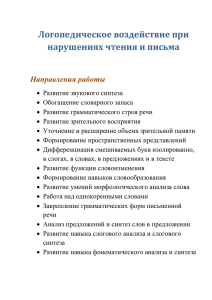
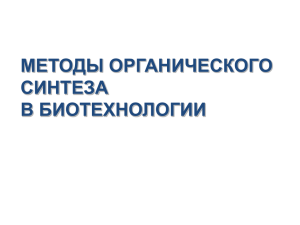
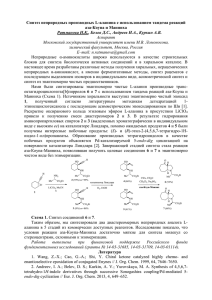
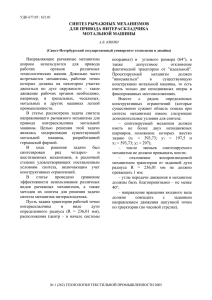
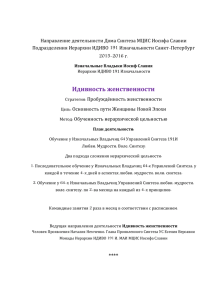
Совмещение экстремального и оптимизационного синтеза при проектировании ... УДК 621.01 К. Ц. ЕНЧЕВ, С.Б.СТОЙКОВ СОВМЕЩЕНИЕ ЭКСТРЕМАЛЬНОГО И ОПТИМИЗАЦИОННОГО СИНТЕЗА ПРИ ПРОЕКТИРОВАНИИ НАПРАВЛЯЮЩЕГО МЕХАНИЗМА ПОРТАЛЬНОГО КРАНА1 1. Введение В классическом синтезе механизмов, который проводится методами кинематической геометрии Бурместeра [1], как правило, синтезированный механизм – четырехзвенный (чаще всего шарнирный четырехзвенник). Вычислению этими методами подвергаются m 5 параметров, а значения остальных его параметров задаются предварительно (свободно или часть из них находятся по некоторым другим требованиям, за пределы предстоящих для реализации с использованием кинематической геометрии). Если шарнирный четырехзвенник (рис. 1) синтезируется как передаточный механизм [для реализации (аппроксимирования, приближения к) данной передаточной функции Рис. 1. Схема шарнирного четырехзвенника при его синтезе как передаточный механизм ψ ψ() ] и порядок m решаемой задачи является наиболее высоким ( m 5 ), длина (как алгебраическое число) стойки d OC принимается свободно (точнее, задается по конструктивным соображениям). Остальные 5 параметров механизма , r OA , l AB , R CB и 0 ψ0 вычисляются (отрезки направлены, а углы – ориентированы). Если шарнирный четырех- звенник (рис. 2) синтезируется также при m 5 , как направляющий (для реализации траектории q , заданной своим уравнением), предварительно задаются координаты xO и yO не- подвижной точки O , абсцисса xQр точки Q , чертящей траекторию, в специально выбранном еë положении Qр (узел аппроксимации) и длины r OA и a AQ соответствующих отрезков (общее число предварительно задаваемых параметров, в этой задаче почти всегда свободно – 5). Вычисляются 5 остальных параметров l AB , b BQ , R CB , xC и yC механизма. Положение механизма, для которого Q Qр , называется расчетным, так как для этого положения вычисляются (делается расчет) значения искомых параметров. Видно, что в классическом синтезе при реализации данной зависимости (передаточной функции, траектории и др.) всегда в наличии предварительно задаваемые параметры. Статья имеет научно-популярный и обзорный характер, но в ее конце сделаны и некоторые новые выводы. 1 Теория Механизмов и Машин. 2008. № 2. Том 6. 35 Синтез механизмов Рис. 2. Схема шарнирного четырехзвенника при его синтезе как направляющий механизм Их значения нужно задать произвольно, чтобы потом было применять аппарат кинематической геометрии. Обратите внимание – с помощью этих параметров нельзя увеличить число m положений, соседних или бесконечно близких, по которым проводится синтез, и таким образом увеличить степень получаемой аппроксимации. Рассматриваемое обстоятельство кажется недостатком кинематической геометрии. В связи с этим задача синтеза передаточного шарнирного четырехзвенника как будто отличается большим совершенством с точки зрения формулировки по сравнению с задачей синтеза направляющего шарнирного четырехзвенника. И действительно, при второй задаче число предварительно задаваемых параметров (как уже было упомянуто – значения которых чаще всего принимаются произвольно) больше, что как будто только излишне усложняет схему. 2. Экстремальный синтез. Экстремальный синтез механизмов (Е–синтез) [2] может рассматриваться как высшая стадия кинематической геометрии Бурместера, так как при нем для числа подвергающихся вычислению параметров при синтезе восьмизвенного механизма имеем m 9 (Е0–синтез) или m 10 (Е000–синтез) и при синтезе четырнадцатизвенного механизма – m 15 . Это означает, что с его помощью порядок m решаемой задачи, т.е. число положений, по которым проводится синтез (при Е–синтезе они всегда бесконечно близки), число общих бесконечно близких точек данной и реализованной зависимостей в узле аппроксимации (он является единственным и имеет высокую кратность – m ) и получаемая степень аппроксимации значительно повышаются. Е–синтез обладает уникальным свойством. Задача синтеза механизма (восьмизвенного или четырнадцатизвенного) распадается на несколько простых задач последовательного синтеза шарнирных четырехзвенников. По этой причине расчетная процедура в качественном отношении имеет сложность процедуры как в кинематической геометрии Бурместера. Усложнение является только количественным, поскольку вместо одного синтезируются несколько четырехзвенников. Однако и при экстремальном синтезе указанный выше кажущийся недостаток кинематической геометрии (наличие предварительно задаваемых параметров) остается, даже углубляется. Например, когда синтезированный механизм – восьмизвенный, задача синтеза распадается на три задачи последовательного синтеза трех шарнирных четырехзвенников, названных соответственно нулевым, первым и вторым. Однако лишь синтез первого и второго шарнирного четырехзвенника, которые связаны последовательно в т. н. замыкающем 36 http://tmm.spbstu.ru Совмещение экстремального и оптимизационного синтеза при проектировании ... шестизвенном механизме, способствует реализации заданных m бесконечно близких положений. Синтез нулевого шарнирного четырехзвенника, хотя и осуществляется с помощью аппарата кинематической геометрии Бурместера, обеспечивает лишь необходимые условия проведения затем Е-синтеза шестизвенного механизма, и поэтому все его параметры в вышеупомянутом смысле можно считать предварительно заданными. 3. Оптимизационный синтез Недостаток кинематической геометрии и ее высшей стадии, Е-синтеза, проистекающий из наличия задаваемых заранее параметров, значительная часть которых – произвольно, как уже было упомянуто, только мнимый. В сущности, это было недостатком в недалеком прошлом, когда не было мощных компьютеров, и поэтому было затруднено использование вычислительной процедуры синтеза механизмов, которую называем оптимизационным синтезом. Очевидно, что свойства одного механизма зависят от значений всех его параметров, и полученная при синтезе степень аппроксимации определяется не только числом положений, по которым проводится синтез, т.е. числом параметров, значения которых вычисляются, как было принято до сих пор, но и значениями тех предварительно задаваемых параметров, которые принимаются произвольно. Нужно лишь найти способ вычисления тех значений свободных параметров, которые приводят к добавочному повышению степени аппроксимации. Это может произойти, если свободные параметры станут варьируемыми и будут многократно изменяться в процессе решения задачи. Полученные результаты нужно оценивать с точки зрения достигнутой аппроксимации при каждом наборе значений свободных (варьируемых) параметров; необходимо найти лучшее (оптимальное) решение. При этом надо придерживаться определенной стратегии варьирования. Иными словами, это может произойти, если аппарат кинематической геометрии (экстремального синтеза) и оптимизационный синтез используются совместно. В численных примерах диссертации [2] также имеется варьирование свободных параметров, но оно очень ограничено и соответствует возможностям вычисления калькулятором. Оптимизационный синтез, требующий значительного варьирования всех свободных параметров и связанный с огромным объемом расчетных (вычислительных) процедур, возможен лишь при использовании мощных современных компьютеров, как было уже отмечено. Разумеется, оптимизационный синтез способствует не только дополнительному увеличению степени аппроксимации, которая является лишь одним, хотя и основным, условием синтеза механизма. Оптимизационный синтез также способствует, путем „включения в работу“ свободных параметров, удовлетворению ряда дополнительных требований синтеза, связанных с наиболее эффективным практическим функционированием механизма в реальных условиях. И в связи с этим существование многих свободных параметров в экстремальном синтезе (их число приблизительно равно числу вычисляемых параметров) уже не является его недостатком, а серьезным преимуществом. В настоящей статье проиллюстрируем совмещение экстремального синтеза с оптимизационным. Нас снова интересует только степень полученной при синтезе аппроксимации. Однако, на решенных численных примерах (решенных в других работах с участием обоих авторов, где удовлетворены и значительные дополнительные условия синтеза) покажем, что с помощью оптимизационного экстремального синтеза (ОЕ-синтеза) получаются очень хорошие результаты по отношению к степени аппроксимации. Из-за ограниченного объема статьи мы рассмотрим только полученные результаты при различных вариантах решения одной единственной задачи. Теория Механизмов и Машин. 2008. № 2. Том 6. 37 Синтез механизмов 4. Синтез восьмизвенного прямолинейно-направляющего механизма стрелы портального крана Мы располагаем примерами, изложенными в [5] и [6], которые относятся к синтезу восьмизвенных укосин портальных кранов. В этих примерах благодаря ОЕ-синтезу получены весьма высокие (мы могли бы даже позволить себе нескромность сказать – фантастично высокие) степени аппроксимации. В качестве укосины портального крана в практике используют шарнирный четырехзвенник (на рис. 3 OK c Qc Lc M c , изображенный пунктирной линией; индекс „с“ в его обозначении имеет смысл „существующий практически“). Рис. 3. Схемы существующего 4звУМ-а (пунктирной линией) и спроектированного с помощью ОЕ0-синтеза 8звУМ-а (сплошной линией) 38 http://tmm.spbstu.ru Совмещение экстремального и оптимизационного синтеза при проектировании ... В состав последнего входят следующие звенья: укосина (стрела) OK c , хобот K cQc Lc и обтяжка M c Lc . В точке Qc в схеме четырехзвенного укосинного механизма (4звУМ) подвешен полезный груз G, переносимый краном. В него включается и вес грузозахватного устройства. Механизм синтезируется как прямолинейно-направляющий, и основным требованием его синтеза является аппроксимация траектории q( 4 ) c точки Qc данной горизонтальной прямой q на рабочем участке Q1Q2 крана. Этим уменьшается приведенный к стреле 1 момент M G груза G , что разгружает двигатель, движущий стрелу. Кроме того, удаляется опасность ускорения механизма (опять из-за момента M G ) и опрокидывания крана в аварийной ситуации (при эвентуальном аварийном прерывании связи между двигателем и стрелой). Уменьшается и энергия EG 0 груза G при его переносе от одного крайнего положения механизма до другого, которая периодически нагружает или помогает двигателю (энергия EG равна суммарной работе груза G , принятой знаком “+” как при спуске груза по траектории q( 4 ) c вниз, так и при его поднятии вверх). Ее уменьшение приводит к большей равномерности энергетического потока, который отдает двигатель. Улучшается его режим работы, что, вместе с меньшим моментом M G , позволяет использование двигателя меньшей мощности и приводит к экономии электроэнергии. При полном совпадении кривой q (4)c с прямой q момент M G и энергия EG равны нулю. Степень аппроксимации прямой q траектории q (4)c не очень большая, хотя на практике соглашаются с ней, используя более мощный двигатель для привода стрелы и рассчитывая на мощные тормоза в аварийной ситуации. Упомянутая степень невелика, так как число параметров шарнирного четырехзвенника сравнительно мало. В работе [4] ее автор решил задачу усовершенствования шарнирно-сочлененной укосины портального крана, синтезируя четырехзвенник по двум бесконечно близким положениям (с помощью аппарата кинематической геометрии Бурместера при m 2 ) и находя значения восьми варьируемых параметров оптимизационным путем. В дальнейшем все развилось более радикально. В работе [5] предлагается заменить 4звУМ портального крана восьмизвенным укосинным механизмом (8звУМ) целесообразно подобранной структуры. Эта структура должна сохранять характерную конфигурацию 4звУМ, принятую в практике по эксплуатационным соображениям, и позволить определить параметры 8звУМ с помощью ОЕ-синтеза. Упомянутая структура получается следующим образом (см. изображенную сплошной линией схему на рис. 3): 4звУМ OKQLM встраивается в новую структуру и уже называется базовым механизмом (нулевым шарнирным четырехзвенником); шарнир M обтяжки ML освобождается от своей неподвижности и в схему механизма добавляется новое, короткое (около 10% длины стрелы OK ) звено FM с новым неподвижным шарниром F ; одна из двух степеней свободы, которые имеет полученный пятизвенный механизм OKQLMF , отнимается путем соединения стрелы OK и нового звена FM (т.е. путем замыканием пятизвенного механизма) с малогабаритным шестизвенным механизмом, образованным путем последовательного соединения двух шарнирных четырехзвенников OABC (первый) и CDEF (второй). Узел аппроксимации, определяющий расчетное положение при ОЕ-синтезе восьмизвенного механизма, обозначен (как и раньше) Qр . Синтез нулевого шарнирного четырехзвенника совершается при m0 2 по двум бесконечно близким положениям, несмотря Теория Механизмов и Машин. 2008. № 2. Том 6. 39 Синтез механизмов на то, что Е-синтез возможен еще и при m0 4 , но требуемая по эксплуатационным соображениям конфигурация базового шарнирного четырехзвенника не может быть сохранена [4]. Синтез первого и второго шарнирных четырехзвенников совершается при m1 m2 4 с помощью аппарата соответственно экстремальной кинематической геометрии, разработанной первым из авторов [2], и аппарата кинематической геометрии Бурместра. Этим узлу Qр обеспечивается кратность 7, т.е. бесконечно близкие общие точки реализованной траектории q (8) (точки Q синтезированного 8звУМ ) и прямой q в узле 7. Проведенный экстремальный синтез замыкающего шестизвенного механизма OABCDEF представляет собой Е0-синтез. Общее число параметров 8звУМ весьма велико – 24. Значения четырех из них (переносимый груз G и его ход Δs , как и длины стоек d1 OC и d 2 CF первого и второго шарнирных четырехзвенников) всегда даны ( d1 и d 2 принимаются по конструктивным соображениям). Число варьируемых параметров – 12 ( smin , sр , H , r0 OK , q0 KQ , χ 0 , l0 KL , R0 ML , xF , yF , θ1 , θ 2 ), а вычисляемых – 8 ( xM , yM , r1 OA , l1 AB , R1 CB , r2 CD , l2 DE , R2 FE ). При решении задачи синтеза 8звУМ удобно использовать прототип. Это существующий портальный кран, значения основных эксплуатационных характеристик G и s которого близки к данным в задаче значениям этих же величин. Его 4звУМ служит базовым механизмом создаваемого нового 8звУМ. Интервальные ограничения варьируемых и вычисляемых параметров нулевого шарнирного четырехзвенника на первом этапе оптимизационного поиска, описанного в [4], в таком случае могут соответствовать специально подобранным окрестностям параметров базового механизма. Это означает, что вновь созданный кран будет просто усовершенствованным вариантом прототипа. Ценным в этой идее является то, что при синтезе совсем нового 8звУМ, т.е. когда в практике нельзя найти подходящий базовый механизм, то последний может быть принят (начерчен) теоретически, без апроксимационного синтеза – только по эксплуатационным и конструктивным соображениям. Потом он же может послужить практически несуществующим прототипом в решаемой задаче синтеза 8звУМ. Возникает еще одна очень полезная идея [6]. Так как вычисляемых параметров нулевого шарнирного четырехзвенника только два (координаты точки M в расчетном положении), то становится возможным модернизация существующего и работающего на практике портального крана по описанной здесь методике. При модернизации звенья базового шарнирного четырехзвенника сложной конструкции и большой металлоемкости (стрела и хобот) сохраняются неизменными, и их параметры r0 , q 0 , χ 0 и l 0 из варьируемых становятся данными, т.е. только число данных параметров увеличивается с 4 до 8, а число варьируемых параметров уменьшается с 12 до 8. Методика синтеза 8звУМ не изменяется. Модернизация состоит в монтировании в кране обтяжки ML новой длины и с новым положением шарнира M и малогабаритного замыкающего шестизвенного механизма OABCDEF с его определенными при ОЕ0-синтезе размерами. Модернизацию существующего и работающего на практике портального крана можно сделать, не усложняя структуру шарнирно-сочлененной укосиной, т.е. если она останется четырехзвенной. Так сделано в работе [4], где указанным способом модернизован портальный кран, изготовленный на Русенском судостроительном заводе. Для оценки степени аппроксимации прямой q траектории q ( 4 ) c (или q ( 4) в случае эвентуального усовершенствования 4звУМ), соответственно q (8) , вычисляется отклонение соответствующей точки Q от прямой для ряда положений 4звУМ, соответственно 8звУМ 40 http://tmm.spbstu.ru Совмещение экстремального и оптимизационного синтеза при проектировании ... в их рабочем интервале. Определяется его максимальное абсолютное значение max . Показателями этой степени аппроксимации являются также максимальное абсолютное значение M G ,max приведенного к стреле момента M G и значение энергии EG соответствующего механизма. Величины max , M G ,max и EG – одновременно показатели совершенства в работе каждого портального крана. Так как оптимизационная задача, которая решается, имеет лишь один критерий, то критерием оптимальности может служит любой из этих трех показателей, и в [5] таким предлагается момент M G ,max . Остальные два показателя, как и минимальное значение γ min угла передачи движения в каждом из трех шарнирных четырехзвенников, мы рассматриваем как посткритерии. Для варьирования свободными параметрами принят метод Монте-Карло. На рис. 3 пунктирной линией изображен в масштабе существующий 4звУМ (только кривые q ( 4 ) c и q (8) на этой рисунке ввиду очень малого вертикального диапазона их изменения, принципиальны), изготовленного на Русенском судостроительном заводе портального крана, упомянутого выше. На рис. 4 показан сплошной линией и опять же в масштабе Рис. 4. Схемы 4звУМ-а (пунктирной линией) и 8звУМ-а (сплошной линией), модернизирующие базовый механизм 8звУМ, модернизирующий этот кран, параметры которого вычислены с помощью ОЕ0синтеза. Снова на рис. 3 сплошной линией приведен вновь спроектированный 8звУМ (с вычислением также параметров стрелы и хобота), при синтезе которого вышеупомянутый су- Теория Механизмов и Машин. 2008. № 2. Том 6. 41 Синтез механизмов ществующий 4звУМ служит прототипом. На рис. 4 пунктирной линией изображен 4звУМ ( OK y Ly M y ), модернизующий тот же кран (индекс „у“ означает „усовершенствованный“). Значения показателей совершенства работы этих кранов вписаны ниже в таблице. В ее конце сопоставлены разные варианты решения, из чего видно преимущество синтезированных с помощью ОЕ0-синтеза восьмизвенных направляющих механизмов по сравнению с использованным традиционно шарнирным четырехзвенником. Результаты действительно фантастичны. Результаты, с помощью которых сравниются существующий 4звУМ и синтезированные в работах с участием авторов 4звУМ и три 8взУМ Русенский судостроительный завод Показатели сoвeршенствa Портальный кран (G=200 kN, Δs =26,5 m) Δ max kN.m γ B , min γ E , min γ L , min сm EG kN.m deg deg deg 2117,0 68,3 309,2 – – 19,9 562,0 73,7 235,0 – – 21,8 66,7 6,0 13,1 30,5 45,2 23,0 12,3 1,2 2,7 26,5 34,5 30,9 23,5 1,6 49,1 32,2 21,7 а) б) 3,8 0,9 1,3 – – – б) в) 8,4 12,3 17,9 – – – в) д) 2,8 3,8 1,8 – – – б) г) 45,7 61,4 87,0 – – – а) г) 172,1 56,9 114,5 – – – в) г) 5,4 5,0 4,9 – – – а) с существующим 4звУМ, служащим базовым механизмом или прототипом б) с модернизированным 4звУМ в) с 8звУМ-ом, модернизирующим базовый механизм и спроектированным с помощью ОЕ0-синтеза г) с 8звУM-ом, новопроектированным по прототипу с помощью ОЕ0-синтеза д) с 8звУM-ом, модернизирующим базовый механизм и спроектированным с помощью О-синтеза (см. дальше) Достигнутое уменьшение (улучшение); во сколько раз M G , max 7,2 У 8звУМ-а, спроектированного по прототипу, качество работы выше (в 5 раз) по сравнению с качеством работы 8звУМ-а, как модернизирующего базовый механизм. Объяснение является очень простым – в первом случае число варируемых параметров на 4 больше. 42 http://tmm.spbstu.ru Совмещение экстремального и оптимизационного синтеза при проектировании ... На рис. 5 для наглядности построены диаграммы ( s ) и M G M G ( s) для укосинного механизма крана соответственно как базовый механизм или прототип ( c и M G ,c ), как модернизованный 4звУМ ( м 4 и M G ,м 4 ), как 8звУМ, модернизирующий базовый механизм ( м8 и M G ,м8 ), как 8звУМ, новопроектированный по прототипу ( н и M G ,н ). Рис. 5. Диаграммы для отклонения Δ точки Q от прямой q и для приведенного к стреле момента M G переносимого полезного груза G как функции перемещения s [smin , smax ] 5. Оптимизационный синтез без участия кинематической геометрии Рассмотренные примеры наглядно иллюстрируют, что экстремальный синтез, безусловно, нуждается в совмещении с оптимизационным синтезом. Однако, верно ли утверждение, что оптимизационный синтез также нуждается в совмещении с экстремальным синтезом? Может быть, возможно лишь с помощью чистого оптимизационного синтеза (О–синтеза), т.е. без участия кинематической геометрии в синтезе, при решении задач в упомянутых выше примерах, получить близкие и даже лучшие результаты, чем те, которые уже приводили? Для того чтобы ответить на этот вопрос, мы создали подходящий софт для О–синтеза 8звУМ. При этом синтезе мы сохранили без изменения критерий оптимальности, посткритерии, необходимые функциональные ограничения в качественном и количественном отношении, а также и стратегию поиска оптимального решения. Все параметры механизма, за исключением данных, мы приняли за варьируемые. За интервалы изменения параметров на первом этапе процедуры поиска, описанной в [5], приняли интервальные ограничения при ОЕ0–синтезе в указанных выше примерах и синтезировали механизм как модернизацию базового механизма. Показатели качества крана, соответствующего этому решению, приведе- Теория Механизмов и Машин. 2008. № 2. Том 6. 43 Синтез механизмов ны в таблице под обозначением (д), а сам механизм изображен в масштабе на рис. 6 при пр ср , где угол пр ср 1 1 2 равен углу р при ОЕ0–синтезе на рис. 3 (индекс 2 обозначения пр ср нужно понимать как «приблизительно среднее»). Однако на рис. 6 (см. и увеличенный фрагмент рис. 6 ) замечается что-то странное – прямая, проведенная через центры шарниров O и A , почти проходит и через центр шарнира B , т.е. шарнирный четырехзвенник OABC находится почти в мертвом (особом) положе- Фрагмент с рис. 6 Рис. 6. Схема 8звУМ-а, модернизующего базового механизма и синтезированного с помощью О-синтеза, и построение в монографии проф. Лихтенхельдта. нии, как при ОЕ0–синтезе. Та же особенность фигурирует и при всех решениях на последнем этапе поиска. На первый взгляд, этот результат нелогичен – при О–синтезе не предусмотрено ограничение получения мертвого положения шарнирного четырехзвенника OABC при пр ср , как при ОЕ0–синтезе, а такое мертвое положение наблюдается при полученном решении. Монография [3] проф. Лихтенхельдта помогает нам найти логическое объяснение этого смущающего феномена (и обнадеживающего автора Е–синтеза). На рис. 216 (с. 127) этой монографии показано графическое правило нахождения масштабной схемы укосинного шарнирного четырехзвенника с высокой степенью аппроксимации прямой q траектории q( 4) ( q ( 4 ) c на рис. 3) в одной приблизительно средней части данного хода s с помощью поворотного круга w звена 7. Очевидно, что оптимизационный процесс делает „колоссальные усилия“, добиваясь этого решения. Однако ему „мешает“ дополнительный замыкающий шестизвенный механизм OABCDEF , и поэтому он „стремится остановить“ его движение в уже упомянутой средней части того же хода. А это с известным приближением может произойти, если шарнирный четырехзвенник OABC находится в мертвом положении. И так как возможных мертвых положений четырехзвенника – два, то процесс „предпочитает“ более благоприятное из них в связи со „своими целями“, т.е. положение, в котором три характерные точки располагаются в порядке O , B , A , как показано на рис. 6. В этом случае окружность с центром B и радиусом BA l1 (см. фрагмент с 44 http://tmm.spbstu.ru Совмещение экстремального и оптимизационного синтеза при проектировании ... рис. 6) лучше прилипает к окружности с центром O и радиусом OA r1 , что задерживает более длительное время точку B , а значит и весь замыкающий шестизвенный механизм, приблизительно неподвижным при непрерывном вращении точки A . На рис. 6 показано, что действительно оптимизационный процесс успел приблизительно „добраться“ до графического построения на рис. 216 упомянутой монографии. Прямая OK и перпендикуляр к прямой q , проходящий через точку Q , пересекаются в одной точке (в полюсе P ) и отрезок QP является диаметром поворотного круга w . Тогда прямая ML согласно построению должна пройти также через полюс P , и она действительно проходит через него. Точки пересечения X K и X L окружности с прямыми через точку Q , параллельными соответственно прямым OP и MP , определяют прямые OX K и MX L и их точки пересечения YK и YL с диаметром QP (последние две точки в случае почти сливаются). Перпендикуляры через точки YK и YL соответственно к прямым OP и MP должны были бы пересекать эти прямые в точках K и L , что на рис. 6 не совсем так. Это можно объяснить тем обстоятельством, что, принимая пр ср (р из рис. 3), мы не попали точно в мертвое положением шарнирного четырехзвенника OABC , а также и обстоятельством, что все–таки нет 100-процентного „устанавливания“ замыкающего шестизвенного механизма. Читатель сам бы мог убедиться в том, что описанное графическое построение может быть более удачно сделано на рис. 3 и рис. 4, где шарнирный четырехзвенник OABC , благодаря Е–синтезу, стоит точно в мертвом положении. При движении точки Q по рассматриваемой средней части хода s замыкающий шестизвенный механизм не идеально неподвижен, и это способствует, хотя и незначительно, дополнительному улучшению и без этого хорошей степени аппроксимации. Однако, после того как точка Q покинет эту среднюю часть, с той или иной стороны, тогда уже шестизвенный механизм решительно вмешивается в „исправление“ уже „искривляющихся“ частей траектории точки Q. Использованные в этом пункте слова в кавычках способствуют достижению образности при описании наблюдаемого явления, не лишенной известной дозы эмоциональности. Эта образность приводит к краткости, наглядности и лучшей ясности описания. Продолжая в этом же духе, можно еще добавить, что человек с эмоциональным мышлением не может не удивляться невероятному „разуму“ оптимизационного процесса, который, как казалось ему, поступает как умное живое существо – в поиске оптимального решения оптимизационный процесс „сам намечает“ рациональный путь его получения, при этом „не зная“ того, что писал проф. Лихтенхельдт в своей монографии и без прямого алгоритма. Мы решили снова задачу, причем критерием оптимальности приняли отклонение max . В оптимальном решении, которое мы нашли, шарнирный четырехзвенник OABC при пр ср , уже не находится в мертвом положении и построение в монографии проф. Лихтенхельдта не актуально. Сделанный нами анализ полученных механизмов при обоих оптимальных решениях, соответственно с главным критерием M G , max и max , показывает, что в обоих случаях есть различное по виду приближение траектории q(8) к прямой q . В первом случае прямая является касательной кривой (траектории) в точке, для которой пр ср (и там M G 0 ), а во втором наблюдается приближение кривой к прямой чебышевского типа. Мы заметили тоже, что во втором случае аппроксимация прямой немного лучше – получили max 1,42 см , однако более неблагоприятным является значение посткритерия ЕG , для которого нашли 14,6 кНм, и очень велико значение посткритерия M G , max , для которого в данном случае имеем 179,3 кНм. Все-таки мы считаем, что миниТеория Механизмов и Машин. 2008. № 2. Том 6. 45 Синтез механизмов мизация моментa M G , max предпочтительна, поскольку она приводит не только к минимизации работы груза G , но и к удалению опасности от опрокидывания крана от этого момента. А это лучше соответствует требованиям задачи, которую мы решаем. 6. Заключение Непосредственно видно, что оптимизационный синтез при главном критерии M G , max не должен быть использован без эсктремального синтеза, потому что ему нужно мертвое положение первого шарнирного четырехзвенника, и вместо того, чтобы он „трудился упорно” с целью его обеспечения, лучше, чтобы один экстремальный синтез „преподнес его на готовое”. Кроме того, принципиально имеет значение то, что участие экстремального синтеза направляет и ускоряет оптимизационный процесс и быстро проводит процесс в зону лучших решений (чему, очевидно, способствует и почти в два раза уменьшенное число варьируемых параметров). При чистом оптимизационном синтезе процесс идет медленно, и необходимо много поисков, чтобы добиться хорошего результата. Крайный вывод, что совмещение экстремального и оптимизационного синтеза целесообразно и можно рекомендовать. То же самое заключение можно сделать и в случае, когда совмещается классическая кинематическая геометрия Бурместера с оптимизационным подходом в синтезе (см., например, работу [7], в которой замыкающий механизм – шарнирный четырехзвенник с мертвым положением). СПИСОК ЛИТЕРАТУРЫ 1. Артоболевский И.И., Н.И.Левитский, С.А.Черкудинов. Синтез плоских механизмов. – М.: Физматгиз, 1959. –1084 с. 2. Енчев, К.Ц. Екстремен синтез на механизмите. Дисертация, ВТУ”А.Кънчев”. – Русе/Болгария: 1985. – 451с. 3. Лихтенхельдт. В. Синтез механизмов (перевод с немецкого Я. Л. Геронимуса). – М.: Наука, 1964. –227 с. 4. Стойков, С. Върху синтеза на праволинейно направляващия стрелови шарнирен четиризвенник на порталния кран. // Механика на машините. 2004. ТУ–Варна/ Болгария. Год. XII. Кн. 4. С.185-192. 5. Стойков С., Енчев К., Коев П., Антонов А. Оптимизационен екстремен синтез на нов тип праволинейно направляващ осемзвенен стрелови механизъм на портален кран (I част). // Механика на машините. 2005. ТУ–Варна/Болгария. Год. XIII, кн. 2. С.25-33. 6. Стойков, С. Оптимизационен екстремен синтез на нов тип праволинейно направляващ осемзвенен стрелови механизъм на портален кран (II част). // Механика на машините. 2005. ТУ–Варна/Болгария. Год. XIII, кн. 2. С.34-37. 7. Стойков С., Енчев К., Коев П. Оптимизационен синтез на шестзвенен направляващ механизъм на портален кран. // Механика на машините. 2006. ТУ–Варна/Болгария. Год. XIV, кн. 2. С.25-28. Поступила в редакцию 14.06.2008 ОТ РЕДАКЦИИ 9 сентября 2008 г. во время научной конференции «Дни механики в городе Варна» после трагического инцидента в море скончался д.т.н. проф. Кирилл Цветанов Енчев. Редак- 46 http://tmm.spbstu.ru Совмещение экстремального и оптимизационного синтеза при проектировании ... ция выражает глубокое соболезнование родным и близким К.Ц. Енчева и приводит выдержки из двух писем. Первое письмо было получено от проф. К.Ц. Енчева вместе с настоящей статьёй, а второе – от зав. кафедрой ТММ университета г. Руссе доц. О. Алипиева. Статья «Совмещение экстремального и оптимизационного синтеза при проектировании направляющего механизма портального крана» опубликована в последней авторской редакции с сохранением стилистических особенностей авторов. «… Я позволю себе считать, что экстремальный синтез – мое важное научное достижение. Я посвятил всю свою жизнь разработке теории экстремального синтеза. На многих международных конференциях пытался объяснить коллегам его сущность, но, как мне кажется, не успел сделать это вполне удовлетворительно. Теперь моя надежда на Ваш чудесный журнал. С совершенным уважением Ваш Кирил Енчев.» «… 9 сентября 2008 г. на 74-м году жизни скончался проф. д.т.н. Кирил Цветанов Енчев. В продолжение 44 лет проф. Енчев преподавал дисциплину «Теория механизмов и машин» в Русенском университете, долгие годы был руководителем кафедры. Он оставил глубокий след в памяти тысяч студентов своим высоким педагогическим мастерством. Проф. Кирил Енчев – известный учёный в области синтеза рычажных механизмов не только в Болгарии, но и в России, Германии, Румынии, Англии. Несколько мандатов он был членом комиссии машинных наук ВАК. Заведующий кафедрой ТММ университета города Русе доцент Огнян Алипиев.» Теория Механизмов и Машин. 2008. № 2. Том 6. 47