Модель формирования карты местности в процессе активного
advertisement

СЕКЦИЯ 9
Ю. ЛАМПИНЕН1, М.А. ШЕВЧЕНКО1, М.В. ПЕТРУШАН2,
А.И. САМАРИН2
1Хельсинский
технический университет, Финляндия
государственный университет
{J.Lampinen, mash}@hut.fi; samarin@krinc.ru
2Ростовский
МОДЕЛЬ ФОРМИРОВАНИЯ КАРТЫ МЕСТНОСТИ
В ПРОЦЕССЕ АКТИВНОГО ВЗАИМОДЕЙСТВИЯ РОБОТА
СО СРЕДОЙ
Аннотация
Разработана биологически правдоподобная модель формирования
карты местности в процессе активного поведения робота в среде. Модель
базируется на выделении устойчивых признаков во внешней среде с
использованием первичной обработки воспринимаемого яркостного
массива (фильтр Габбора), контекстном описании этих признаков с
использованием, так называемого, фовеального сенсора и поиском
одноименных признаков на исходном и смещенном, в результате
направленного перемещения робота, изображениях.
Составление карты местности рассматривается как переход из
описания среды в системе координат робота к описанию в системе
координат среды.
Введение
Исследования последних лет нейрофизиологических коррелятов
поведенческих реакций [1] привели к обнаружению в гиппокампе мозга
нейронов, импульсная активность которых связана с нахождением
животного в определенном месте заранее обследованной внешней среды.
Возникновение этой активности не зависит от того, из какого места и куда
животное направляется при реализации текущего поведенческого акта.
Этот факт позволил говорить о наличии в структурах мозга, так
называемых, «нейронов места», которые реализуют функцию ориентации
в зрительном пространстве по результатам формирования некоторой
умозрительной карты местности.
Подобного рода исследования приобретают особую актуальность и в
задачах робототехники, когда возникает необходимость формирования
роботом карты местности при планировании им траектории движения и
ориентации в произвольной естественной среде.
УДК 004.032.26(06) Нейронные сети
155
СЕКЦИЯ 9
Предполагается, что робот не имеет исходной привязки к внешней
среде в виде совокупности маяков и реперов.
Первичная зрительная информация представляется массивом
распределения яркостей на рецепторной поверхности визуального сенсора
в зависимости от того, где находится робот и в каком направлении
относительно своего корпуса он смотрит. С другой стороны, это
распределение яркостей зависит от того, что, где и как расположено в том
месте внешнего мира, куда робот смотрит. Внешний мир S представляет
собой совокупность объектов Oi, характеризующихся некоторыми
физическими параметрами (цвет, форма, отражательная способность), а
также их местоположением и ориентацией в абсолютной системе
координат, которая роботу не известна.
При движении робота на плоской сцене описание среды можно
записать как S: S{Oi(xi,yi,γi)}; где xi, yi – соответственно неизвестные
роботу координаты объектов, и γi – параметр, характеризующий
ориентацию объекта в пространстве. Положение робота Rk во внешней
среде характеризуется координатами Xk,Yk и ориентацией в пространстве
βк: Rk = Rk (Xk, Yk, βк). Текущее изображение зрительной сцены Vk(S,Rk)
проецируемое на воспринимающую поверхность сенсора, представляется
матрицей распределения яркостей Ek (m, n) в координатах (m, n) сенсора.
Если текущее воспринимаемое изображение окружения робота Ek =
= Ek (Vk (S, Rk)), то описание внешнего мира S должно находиться по
совокупности его текущих изображений Ep и координат сенсора робота
Rp, где p – точки нахождения робота в среде.
Тогда задача построения модели среды формулируется как задача
нахождения преобразования:
[{Ep} , {Rp}] → S{Oi};
т.е. по совокупности изображений, полученных сенсором робота из
различных точек его нахождения в среде, сформировать описание этой
среды в некоторой определяемой роботом системе координат среды.
Задача ориентации робота в среде формулируется в виде обратной
задачи:
[Ek , S{Oi}] → Rk или [Xk, Yk, βk];
т.е. по единственному изображению, полученному в k-й точке
нахождения робота, и сформированной карте местности определить
координаты этой k-ой точки и ориентацию робота.
Текущие собственные координаты роботу не известны, и исходно все
признаки внешней среды роботом могут описываться только в его
системе координат {Li, αi} (на каком расстоянии Li от робота, и в каком
УДК 004.032.26(06) Нейронные сети
156
СЕКЦИЯ 9
направлении αi относительно направления «прямо перед собой» находятся
выделяемые в поле зрения признаки). Без реализации процедуры перехода
из одной системы координат в другую ни первая, ни вторая задача не
могут быть решены.
Предполагается, что робот снабжен дальнометрической системой
зрения с реализацией механизма фиксации направления взгляда на
целевой локальной области изображения сцены. Кроме того, робот имеет
одометр, выражающий пройденный путь в собственных единицах пути
(шаг, оборот колеса).
Точность измерения расстояния до объектов внешней среды
определяется
устойчивостью алгоритмов выделения достаточно
локальных зрительных признаков этих объектов и эффективностью самих
измерительных процедур.
Выделение локальных признаков зрительной сцены
Предлагаемая процедура выделения первичных признаков на
зрительной
сцене
использует
утверждение,
что
наиболее
информативными участками изображения являются области с
максимальным разнообразием пространственных частот.
Для получения этой характеристики достаточно часто используется
методика выделения данного типа информации при помощи фильтров
Габора с различными параметрами частоты и направления периодической
составляющей [2, 3, 4]:
G f , ( x , y )
f2
f 2 ( x2 y2 )
2
(e if ( x cos() y sin())
2
2
e
e );
(1)
2 2
f – центральная частота; Θ – направление волны; σ – стандартное
отклонение Гауссиана, модулирующего периодическую функцию;
определяет вид боковых волн фильтра; для задач зрительного анализа
/2.
В формуле (1) удалена постоянная составляющая фильтра Габора (DCкомпонента) с целью обеспечить устойчивость процедуры обработки
изображения в условиях изменяющегося общего уровня яркости. В работе
использовался набор фильтров G f k , j восьми различных масштабов f k и
восьми ориентаций j .
УДК 004.032.26(06) Нейронные сети
157
СЕКЦИЯ 9
π
π
(2)
; θ j ( j 1);
k , j 1...8;
2
4
Величина отклика на ту или иную частоту в каждой точке
изображения
вычисляется
путем
пространственной
свертки
соответствующего ядра фильтра с массивом исходного изображения.
f k kf0 2 ; f 0
J k , j ( x, y) G fk ,θ j ( x, y) I ( x, y) ; x, y {1.. S} ,
(3)
SxS – размер изображения.
Оценка разнообразия пространственных частот в некоторой точке
производится определением количества абсолютных значений откликов
фильтра Габора в данной точке, которые превосходят уровень порога,
устраняющего шум и одиночные ориентации.
ψ( x, y )
1, J k , j ( x, y ) t ns ;
0, J k , j ( x, y ) t ns .
k , j 1
8
(4)
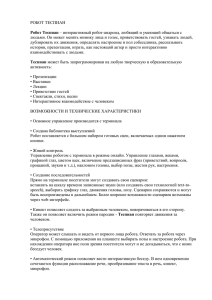
Пример исходного изображения зрительной сцены и выделенные
области с высоким разнообразием пространственных частот представлены
на рис. 1.
Рис. 1. Исходное изображение и пространственное распределение -функции
Следующий шаг заключается в определении позиций локальных
максимумов в пределах аттрактивных областей, координаты которых
далее будут использоваться в качестве особых точек при выделении
зрительных признаков для определения их координат и визуального
описания сцен. Основа процедуры это рекурсивное разделение областей
УДК 004.032.26(06) Нейронные сети
158
СЕКЦИЯ 9
высокого разнообразия частот с плавающим локальным порогом
фильтрации. Пример реализации такой процедуры локализации
информативных зон изображения приведен на рис. 2.
Рис. 2. Динамика аттрактивных зон при поиске локальных пиков
В случае, когда текущий регион является однородным либо вырожден
в одну точку, вычисляется центр симметрии данной области, который и
представляет собой позицию локального максимума:
Всё множество особых точек, найденных для тестовой сцены,
представлено на рис. 3.
Рис. 3. Особые точки на зрительной сцене
Измерение расстояний до объектов в системе координат робота
УДК 004.032.26(06) Нейронные сети
159
СЕКЦИЯ 9
Существует ограниченное число методов определения расстояния до
объектов внешней среды с использованием собственно системы
зрительного восприятия, без применения механизмов активной локации.
В основном применяются три метода.
Первый метод – стереокинетическоe восприятиe, базируется на
анализе проекционных отношений одноименных особых точек
изображения до, и после смещения робота или сенсора на определенное
расстояние. Максимальный удельный вес вычислений при таком способе
измерения расстояний приходится на идентификацию одноименных
особых точек и поиск их координат в оптической проекции изображения
сцены на воспринимающей поверхности сенсора. Сложности
использования такого метода связаны с необходимостью предварительной
оценки возможных нелинейностей оптической системы сенсора и со
сложностью интерпретации информации о внешнем мире при
исчезновении (заслонение) или слиянии поименованных точек. Метод
реализуется только при движении робота.
Второй метод – метод эталонных размеров, базируется на
использовании информации о характеристических размерах объектов на
заданных расстояниях от сенсора. Процедура может применяться в
условиях стационарного положения робота, но требует изначального
распознавания объектов внешнего мира и позволяет определить
расстояние до объекта по отношении размеров его текущей проекции к
эталонной.
Наиболее перспективным, простым в реализации и универсальным как
для стационарного положения робота, так и для динамического режима
измерений, может быть метод триангуляционного измерения. Метод
использует известные тригонометрические отношения синусов углов и
противолежащих сторон треугольника, когда по заданной базе между
точками нахождения сенсора и двум углам определяется расстояние до
объекта. Этот метод требует наличия подвижного сенсора, реализующего
функцию нацеливания оптической оси на выделенную особую точку
зрительной сцены, и датчик угла поворота.
Возможны два варианта реализации метода:
бинокулярный, с двумя сенсорами и измерением угла их конвергенции
при слиянии фрагментов изображения в центральной (фовеальной) части
воспринимающей матрицы при известном расстоянии между сенсорами;
монокулярный, с одним подвижным сенсором, отслеживающим
целевой объект (особую точку) в процессе движения робота, при этом
регистрируется величина пройденного пути.
УДК 004.032.26(06) Нейронные сети
160
СЕКЦИЯ 9
Монокулярный метод триангуляционных измерений для определения
расстояний до целевых объектов сцены может применяться и в условиях
стационарного положения робота. В этом случае визуальная система
робота должна обладать двумя угловыми степенями подвижности
(поворот «глаза» и поворот «головы»), что для систем зрительного
восприятия высокоорганизованных животных выполняется всегда и
может быть достаточно просто реализовано в робототехнических
системах. В этом случае базовым расстоянием для вычислений является
расстояние между осями поворота головы и глаза. В начале определяется
угол нацеливания сенсора относительно направления ориентации головы,
а потом, при удержании особой точки объекта в фовеальной части поля
зрения, поворачивается голова до момента зануления угла нацеливания
сенсора. Измеряемые угол нацеливания сенсора при нулевом угле
поворота головы и угол поворота головы при нулевом угле нацеливания в
конечном положении дают возможность определить местоположение
рассматриваемого
объекта (расстояние и направление) в системе
координат робота. Если фиксировать одну из этих степеней подвижности
и отслеживать целевой объект при перемещения робота, то точность
локализации этого объекта может быть значительно повышена.
Описанный метод определения положения объектов в полярной системе
координат робота дает значения угловых направлений αi как измеряемых
величин, а значения расстояний до объектов Li как вычисляемых величин.
Система координат среды и формирование карты местности
Как отмечалось во введении, формирование карты местности или
модели среды должно осуществляться по совокупности изображений,
получаемых сенсором робота в процессе его перемещения в среде. Эта
модель должна содержать описание объектов среды, их местоположение и
ориентацию. Сама по себе задача объектной интерпретации некоторого
массива интенсивностей оптического потока или, так называемого,
объектного восприятия изображений является одной из сложнейших
задач, как когнитивной психологии [5], так и зрения роботов.
Предполагается, что объектное восприятие должно формироваться
роботом самостоятельно в процессе его активного взаимодействия со
средой.
Один из возможных вариантов формирования такого восприятия
может происходить в процессе построения роботом модели среды. Можно
предположить, что, если в системе координат робота выделяемые особые
УДК 004.032.26(06) Нейронные сети
161
СЕКЦИЯ 9
точки находятся в одном месте среды, то они принадлежат одному
объекту. Если осуществить переход их системы координат робота в
систему координат внешней среды, то локализацию этого объекта можно
осуществить по оценке положения совсем других особых точек,
полученных из другого (может быть противоположного) ракурса
восприятия в том же самом месте пространства. Эта процедура позволяет
сегментировать зрительную сцену на объекты по характеристикам
пространственного положения выделяемых особых (информативных)
точек изображения независимо от ракурса восприятия. Возможность
такой локализации произвольной области внешней среды появляется в
результате формирования роботом некоторой внешней системы
координат. Алгоритм формирования роботом внешней полярной системы
координат (, ) заключаются в следующем.
На первом шаге робот, находясь в произвольном месте внешней среды
при произвольной его ориентации, выделяет в поле зрения две
разнесенные особые точки или компактные группы точек и определяет их
координаты в собственной системе координат (L0, 0 и L1, 1).
Местоположение первой точки, вернее, объекта, которому принадлежит
первая точка, принимается за начало системы координат О0 (0 = 0, 0 =
0). Местоположение второй точки О1 определяется исходя из условия, что
вторая точка в системе координат первой точки имеет нулевое
направление 1 = 0 и расстояние от первой до второй точки определяется
как:
1 L20 L12 2 L0 L1 cos( 0 1 ) ;
Таким образом, задана внешняя система координат , .
Координаты начального местоположения робота в этой системе
координат определяются как:
ρr(0) = L0; φr(0) = arcsin(L1/ρ1sin(α1 – α2)); βr(0) = 2π – φr(0) – α1.
Следует отметить, что строится модель среды, в которой объекты и
робот не точки, а пространственные тела, поэтому координаты объектов в
плоской среде описываются не парой, а тройкой координат, (i, i, γi) для
i-х объектов и (r, r, βr)k для k-й точки фиксации положения робота в
пространстве.
Тогда базовой ориентацией объекта О0 будет угол, под которым робот
в системе координат среды смотрит на этот объект из исходного
положения γ0 = φr(0); Базовая ориентация объекта О1, по положению
УДК 004.032.26(06) Нейронные сети
162
СЕКЦИЯ 9
которого вычисляется направление орты полярной системы координат
среды определяется как: γ1 = 2π – φr(0) – (α0 – α1).
На втором шаге робот совершает перемещение в направлении β к(1) на
расстояние Lr(1). По тройке координат робота в начальном положении,
направлению и расстоянию перемещения вычисляются координаты
робота (r, r, βr)k при k = 1. Из этого положения визуальной системой
фиксируются новые оптические неоднородности, определяются их
координаты в системе координат О0 , О1.
В результате последовательных перемещений робота в среде
формируется перечень координат особых точек и перечень ракурсных
индексов этих точек. Под ракурсным индексом подразумевается
направление в системе координат среды взгляда сенсора робота, при
котором происходило определение местоположения этой точки. На
последнем этапе построения карты местности осуществляется
пространственная кластеризация особых точек, каждый кластер получает
имя объекта, координатами объекта считаются координаты центров
тяжести кластеров, ориентация объекта определяется по направлению
взгляда сенсора при идентификации местоположения первой особой
точки в кластере.
Заключение
В изложенном докладе представлена лишь первая часть работы,
посвященная проблеме познавательной деятельности робота в
незнакомом окружении. На этом этапе формируется не модель среды в
базисе визуальных признаков, а карта местности. Карта местности в
отличие от модели среды оперирует с некоторыми символьными,
поименованными объектами, главной характеристикой которых является
нахождение в определенном месте среды. Вместе с тем, полученной
информации о контекстных характеристиках откликов фильтра Габбора в
особых точках, информации об их устойчивости при разных ракурсах
восприятия достаточно для формирования зрительных описаний этих
объектов. При наличии таких описаний можно говорить о построении
модели среды в визуальном базисе и о решении задачи ориентации робота
на местности по единственному изображению, поступающему на его
сенсор.
Список литературы
УДК 004.032.26(06) Нейронные сети
163
СЕКЦИЯ 9
1. Dragoi G., Harris K.D., Buzsaki G. Place Representation within Hippocampal Networks
Modified by Long-Term Potentiation. Neuron. Vol. 39. 2003. 1-20.
2. Marcelja S. Mathematical description of the responses of simple cortical cells. J. Opt. Soc.
Am., 70/11:1297-1300, 1980.
3. Jones J.P. and Palmer L.A. An evaluation of the two-dimensional gabor filter model of simple receptive fields in cat striate cortex. J. Neurophysiol., 58(6):1233-1258, 1987.
4. Lampinen J., Shevchenko M. Landmark detection with regions of maximal feature diversity.
In proc. of STEP’04, September 2004.
5. Найссер У. Познание и реальность. Смысл и принципы когнитивной психологии. М.:
Прогресс. 1981. 230 с.
УДК 004.032.26(06) Нейронные сети
164