Лекция 3 Условия покоя несвободного твердого тела Cтатически определимые связи.
advertisement

1
Лекция 3
Условия покоя несвободного твердого тела
Cтатически определимые связи.
Рассмотрим тело, покой которого обеспечен связями при произвольной нагрузке.
Такие связи называются достаточными.
Снимем нагрузку. Тело осталось в покое под действием реакций связей. Поскольку
покой сохраняется, то с необходимостью выполняются условия равновесия реакций: VR=0,
MoR=0. В осях x,y,z два векторных условия эквивалентны однородной системе шести
алгебраических уравнений в проекциях.
Ах=0
(1)
В статике твердого тела рассматривают только такие достаточные связи, реакции
которых исчезают при снятии нагрузки. Такие связи называются статически
определимыми. Остальные связи называются избыточными.
Таким образом, чтобы связи были статически определимыми, необходимо, чтобы
система (1) имела только тривиальное (нулевое) решение. Известно, что для этого
алгебраическая система (1) должна иметь 6 неизвестных и ее определитель должен быть
отличен от нуля. Заметим, что это условие является также и условием единственности
решения неоднородной системы при надичии нагрузки.
Ах=b
(2)
Это значит, что в квадратной матрице А не должно быть линейно зависимых столбцов.
Такие столбцы появятся только если
1) две силы реакции могут оказаться на одной прямой, или
2) два момента реакций коллениарны
Отсюда простые правила конструирования статически определимых связей:
Ставя связь, нужно позаботиться о том, чтобы:
1. Суммарное число составляющих реакций связей не превысило шести.
2. Реакция новой связи не могла оказаться на одной прямой ни с одной из реакций
ранее поставленных связей.
3. Момент реакции новой связи не смог быть параллелен моментам поставленных
ранее связей
Избыточность связей имеет простое физическое объяснение. Она возникает, когда
внешние связи дублируют внутренние связи тела, обеспечивающие неизменность расстояния
между точками тела и углов между двумя направлениями в теле. Так, ставя два сферических
шарнира, мы повторно фиксируем расстояние между точками.
Наличие избыточных связей можно выявить двумя мысленными экспериментами:
нагревая тело или немного смещая опоры. Если при этом реакции изменяются, то связи
избыточны (рис.в).
Векторные условия покоя твердого тела.
Рассмотрим покоящееся свободное твердое тело без связей. Приложим к телу систему
внешних сил {F}. Систему {F} назовем уравновешенной, если тело останется в покое.
Ë3
2
Теорема
Необходимым и достаточным условием равновесия системы сил, приложенной
к твердому телу является равенство нулю ее главного вектора и главного момента.
V=0; Mo=0 (2)
Необходимость условий (2) для любой механической системы была доказана выше.
Но для деформируемого тела они недостаточны. Так нить остается в покое под действием
двух растягивающих сил, но она сминается, если поменять направление этих сил,
хотя условия (2) останутся выполненными.
Достаточность условий для твердого тела.
Пусть условия (2) выполнены. Покажем, что после приложения системы {F} тело
останется в покое, т.е. система {F} уравновешена.
Предположим противное, т.е. что тело все-таки начнет двигаться. Чтобы остановить
движение наложим на тело статически определимые связи. Теперь тело полностью
зафиксировано и его равновесие под действием произвольной нагрузки и реакций связей
обеспечено. Значит объединенная система заданных сил {F} и реакций связей {R} является
уравновешенной и с необходимостью:
V+VR=0,
Mo+MoR=0.
Тогда ввиду (2) главный вектор и момент реакций должен быть равен нулю
VR=0 MoR=0
Поскольку связи статически определимы, то это условие означает, что все реакции равны
нулю. Таким образом, связи не нужны, а тело и так остается в покое после приложения
системы {F}. Значит условия (2) являются достаточными для равновесия системы сил {F}.
Теорема доказана.
Скалярные условия равновесия частных систем сил
а) Произвольная пространственная система сил
Хотя соотношения механики имеют векторный характер, все вычисления должны вестись
в скалярной форме. Переход к скалярной форме осуществляется проектированием
векторных соотношений на оси координат. Векторные условия равновесия V=0, Mo=0 в
проекциях на декартовы оси координат дают шесть скалярных условий:
Vx=Fkx=0;Mx=mx(Fk)=0;
Vy=Fky=0; My=my(Fk)=0;
(1)
Vz=Fkz=0; Mz=mz(Fk)=0;
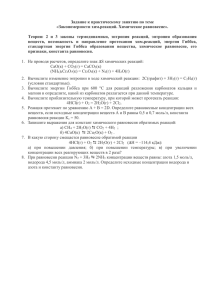
б) Пространственная система сходящихся сил.
Сходящейся называется система сил, линии действия которых пересекаются в одной
точке. Главный момент такой системы относительно точки пересечения сил О равен нулю
Mo=0. Поэтому уравнения моментов в (1) тождественно
удовлетворяются и остается три условия в проекциях:
Vx=0; Vy=0; Vz=0
(2)
O
б”) Плоская система сходящихся сил.
Рис.1
Совместим плоскость ху с плоскостью действия сил. Тогда
последнее уравнение в (2) тождественно удовлетворяется и остается два скалярных условия
Vx=0; Vy=0;
(3)
Ë3
3
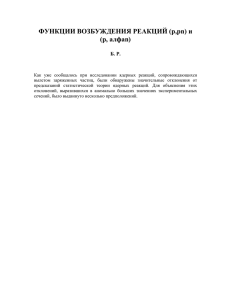
в) Пространственная система параллельных сил
Направим ось z параллельно силам. Тогда главный вектор V будет параллелен z, а
главный момент Мо, будет принадлежать плоскости x y и, значит, перпендикулярен V. Для
x
равновесия достаточно потребовать:
Fk
Vz=Fkz=0
Mx=mx(Fk)=0 My=my(Fk)=0
(4)
V
.
в”) Плоская система параллельных сил
Совместим плоскость zу с плоскостью действия сил. Тогда
Рис.2
последнее уравнение в (4) тождественно удовлетворяется и
остается два скалярных условия, причем момент относительно оси z для плоской системы
называется алгебраическим моментом относительно точки О.
Vz=Fkz=0 Mо=mо(Fk)=0
(5)
x
y
Mo
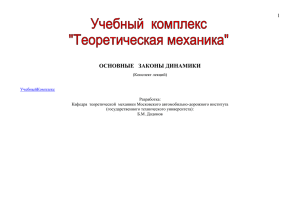
г) Плоская система сил.
В произвольной точке О плоскости сил (Рис.3) построим
систему координат xОу. Главный вектор системы лежит в
плоскости xOy, а главный момент ей перпендикулярен.
o
V
Следовательно для равновесия системы достаточно потребовать
Vx=0 Vy=0
MzMo=mo(Fk)=0
(6)
Легко показать, что справедливы еще две формы уравнений
Рис.3
равновесия для плоской системы сил:
2) Vx=0; MA=0; MB=0 (AB # x)
(7)
3) MA=0; MB=0; MC=0 (ABC- не на одной прямой)
(8)
z
Mo
.
Fk
x
y
Две задачи статики
Прямая задача. Рассматривается тело, зафиксированное статически определимыми
связями, и находящееся под действием заданной нагрузки. Требуется найти реакции связей.
В этом случае выражения (9) являются полной системой уравнений для определения
реакций. Перенеся заданные силы направо, запишем уравнения равновесия в виде
неоднородной алгебраической системы:
Rkx= Fkx=-Vxa
mx(Rk)=mx(Fk)=Mxa
Rky =-Vya
my(Rk)=Mya
(10)
a
a
Rkz =-Vz
mz(Rk)=Mz
Эту систему можно записать в матричном виде:
Ах=b
(11)
Поскольку связи статически определимые, то определитель матрицы А отличен от нуля, и
система имеет единственное решение. Такая задача называется статически определимой.
Обратная задача. Свободное покоящееся тело нагружают системой сил. Требуется
выяснить, останется ли тело в покое. Задача решается выяснением удовлетворяет ли система
сил условиям равновесия.
Эквивалентные преобразования системы сил, приложенных к твердому телу.
Теорема о статической эквивалентности двух систем сил.
Статически эквивалентными назовем нагрузки, вызывающие одинаковые реакции
статически определимых связей. Поскольку для таких связей уравнения равновесия имеют
Ë3
4
единственное решение, определяемое правой частью, в которой находятся проекции
главного вектора и момента нагрузки, то отсюда вытекает справедливость теоремы об
эквивалентности
Необходимым и достаточным условием статической эквивалентности двух систем
сил {F} и {Q} является равенство их главных векторов и главных моментов.
{F}~{Q} если V{F}=V{Q}; Mo{F}=Mo{Q}
(12)
Если существует одна сила, эквивалентная всей системе сил, то она называется
равнодействующей. Например, как следует из аксиом механики, система сил, действующих
на точку, эквивалентна равнодействующей, равной векторной сумме сил. Мы увидим, что
для твердого тела класс эквивалентных сил значительно шире.
Было показано, что уравновешенные нагрузки не вызывают реакций. Значит, все
уравновешенные системы эквивалентны друг другу и пустой системе (нулю). Например,
система сил, приложенных к мосту Рис.6 (сила тяжести автомобиля и две реакции опор)
является уравновешенной при любом положении автомобиля на мосту, т. к. мост остается в
покое.
Замена системы сил на эквивалентную систему называется эквивалентным
преобразованием системы сил. Для произвольной механической системы существует
единственное эквивалентное преобразование систем сил: сложение и разложение сил,
действующих на любую точку системы.
Модель твердого тела допускает более существенные эквивалентные преобразования,
значительно упрощающие исходную систему сил. В примере с автомобилем, движущемся
по мосту, система трех сил претерпевает эквивалентное преобразование: реакции
изменяются так, чтобы компенсировать изменение положения силы тяжести автомобиля и
оставить мост в покое.
Теорема Пуансо.
Пусть к телу приложена произвольная система сил {F}. Следующая теорема отвечает на вопрос какая
простейшая система ей эквивалентна.
Произвольная система сил {F} эквивалентна торсору {Po;m}, состоящему из одной силы Po, равной главному
вектору системы V{F}, и приложенной в произвольной точке О, - и пары{Q, Q'} с моментом m, равным главному
моменту системы Mo{F} относительно точки О.
m = Mo
{F} ~ (Po;m):
Po=V{F}; m=M o{F}
(1)
Fk
Po = V
Для доказательства теоремы вычислим главный вектор и главный момент торсора:
V{Po;Q,Q'}=Po+Q+Q'=Po=V{F}
(Q+Q'=0)
(2)
o
~ Q o Q'
Mo{Po;Q,Q'}=mo(Po)+m=m=Mo{F}
(mo(Po)=0)
Рис.1
Видим, что они соответственно равны главному вектору и
{F}~(P o ;m)
главному моменту исходной системы {F}, значит теорема верна.
Замечание о реакциях связей.
Контактное взаимодействие со связью распределено по некоторой малой площадке. Найти это распределение из
6ти уравнений статики невозможно ввиду бесконечного числа неизвестных.
Сделать число неизвестных конечным позволяет теорема Пуансо, позволяющая заменить распределенные силы одной
силой и одним моментом реакции.
Условия существования и реализуемости равнодействующей. Теорема Вариньона
Как известно, равнодействующей системы сил {F} называется одна сила R, эквивалентная системе.
Предположим, что система имеет равнодействующую R. Тогда по теореме об эквивалентности она должна быть равна
главному вектору системы
R=V{F}.
(3)
Поэтому первым условием существования равнодействующей будет существование главного вектора:
V0.
(4)
Кроме того, по той же теореме:
Момент равнодействующей относительно произвольной точки
равен главному моменту системы сил относительно той же точки.
Ë3
5
Это свойство равнодействующей называется теоремой Вариньона.
Найдем условие существования равнодействующей. Поскольку момент равнодействующей
(а значит и главный момент системы) перпендикулярен самой равнодействующей (главному вектору) то условием
существования равнодействующей будет существование главного вектора и его перпендикулярность главному вектору
системы.
V0;
MoV=0
(MxVx+MyVy+MzVz=0)
(5)
Как было показано, плоская система сил и система параллельных сил имеют взаимно перпендикулярные главный
вектор и главный момент. Значит эти системы эквивалентны равнодействующей, если V0.
Например, система реакций связей тела, нагруженного одной силой F, наверняка имеет равнодействующую,
равную F. Действительно, нагрузка может быть уравновешена только равной и противоположно направленной силой,
которая и является равнодействующей реакций.
Отметим, что равнодействующая имеет практический смысл, когда она осуществима. Это будет так, если линия
ее действия пересекает тело. Равнодействующую сил тяжести бублика легко нарисовать, но трудно реализовать.
Ë3
6
Эквивалентные преобразования силы и пары сил в твердом теле.
В произвольной механической системе силы имеют фиксированную точку
приложения, и с ними возможны лишь преобразования сложения-разложения в точке.
Только в твердом теле допустимы более значительные изменения системы сил без изменения
их воздействия на тело.
Сила.
По теореме об эквивалентности две эквивалентные силы должны быть векторно равны
и давать одинаковый момент относительно произвольного центра. Очевидно, что для этого
они должны иметь общую линию действия. Таким образом, силу в теле можно
переносить только вдоль ее линии действия.
Сила тяжести, перемещаясь вместе с автомобилем по мосту (Рис.6) изменяет реакции
опор, значит, параллельный перенос силы не является ее эквивалентным преобразованием.
Важно заметить, что перенос силы вдоль резинки изменит состояние резинки, значит,
такой перенос не является эквивалентным в деформируемом теле.
Пара сил
Главный вектор пары равен нулю, а ее главный момент не зависит от центра. Таким
образом, эквивалентны все пары с векторно одинаковыми моментами. Значит, в твердом
теле с парой можно делать все, что не изменяет вектора ее момента, в том числе:
изменять силу и плечо, не изменяя их произведение; поворачивать пару в ее плоскости и
переносить пару в параллельную плоскость.
Такие преобразования пары в деформируемом теле приведут к изменению его
состояния (деформации), а значит, не будут эквивалентными. Так перенос пары вдоль
закручиваемой резинки изменит угол ее закручивания.
Ë3