Математическое моделирование движения пластинчатого
advertisement

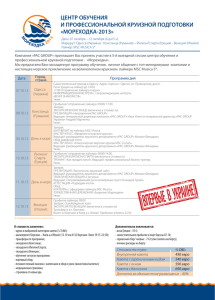
Математическое моделирование движения пластинчатого лайнера… М.П. ГАЛАНИН, А.П. ЛОТОЦКИЙ1, А.С. РОДИН Институт прикладной математики им. М.В. Келдыша РАН, Москва 1 ГНЦ РФ Троицкий институт инновационных и термоядерных исследований, Московская обл. МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ДВИЖЕНИЯ ПЛАСТИНЧАТОГО ЛАЙНЕРА В МАГНИТНОМ КОМПРЕССОРЕ Рассмотрен магнитный компрессор (МК), который является одним из усилительных каскадов мощности в установке «МОЛ» («Магнитное обжатие лайнеров»). Работа МК основана на сжатии магнитного потока металлическим лайнером, ускоренным электродинамическими силами до скорости 1 км/с. Проведено математическое моделирование движения лайнера в различных двумерных приближениях. Построены модели, в которых лайнер считается упругим телом, упругопластическим телом и вязкой жидкостью. Проведена серия расчетов и выполнен сравнительный анализ поведения лайнера для разных моделей. Постановка задачи. Установка «МОЛ» предназначена для исследования работы всех ступеней модуля установки «Байкал» и генерации электрического импульса мегаджоульного уровня. Для третьего усилительного каскада «МОЛ» разработан макет усилительного каскада мощности (магнитный компрессор – МК) [1], работа которого основана на сжатии магнитного потока лайнером, ускоренным электродинамическими силами до скорости 1 км/с. а б Рис. 1. Эскиз основных деталей МК (а); схема продольного сечения МК плоскостью y = const и присоединенные внешние электрические цепи (б) На рис. 1,а показан эскиз основных деталей МК: индуктора и лайнера. В данном случае лайнер представляет из себя плоскую ленту из алюминия, расположенную в виде двойной полосковой линии. В торцах устройства помещены контактные площадки (призмы) с целью предотвращения обрыва ленты (и токовой цепи лайнера) при ее удлинении в процессе ускорения. На рис. 1,б схематично изображено продольное сечение устройства плоскостью y = const и присоединенные внешние электрические цепи. Лайнер, индуктор и относящиеся к ним элементы и величины помечены соответствующими индексами A и B. МК работает следующим образом: в начальный момент времени конденсатор СВ в цепи индуктора заряжен до некоторого начального напряжения. После замыкания цепи ключом КВ по индуктору (и лайнеру) начинает течь разрядный ток. Созданное им в зазоре ускорителя магнитное поле взаимодействует с протекающим по лайнеру током, ускоряя лайнер вдоль оси х. В процессе ускорения лента лайнера ложится на наклонную поверхность призм (см. рис. 1,б), расположенных в торцевых частях компрессора. Левая призма сделана из проводящего материала, а правая – из непроводящего. Для замыкания цепи лайнера на правой призме, соответствующей «открытому» концу витка лайнера, установлена металлическая проводящая накладка. Размер накладки взят меньшим, чем расстояние между пластинами, так что лента лайнера, ложась на призму, достигает проводника и происходит замыкание цепи лайнера. Схемотехнически это соответствует включению коммутатора тока КА. Соответствующий ток протекает по пластине и создает внутри полости лайнера дополнительное магнитное поле. Ускорившись, лайнер сжимает это поле, которое окончательно и выводится из системы в виде импульса тока во внешней цепи лайнера. Математическое моделирование движения пластинчатого лайнера… Перед проектированием и созданием полномасштабного усилителя мощности МК установки «МОЛ» необходимо иметь представление о масштабе вероятных неоднородностей, возникающих при разгоне и торможении плоского лайнера с конечными размерами в магнитном поле. Это и явилось причиной создания экспериментального макета МК, а также постановки задач математического и численного моделирования работы МК. Используемые математические модели. В связи со сложностью изучаемых процессов принято решение о построении различных двумерных моделей. Модель, соответствующую сечению исходной пространственной области плоскостью y = const, будем называть «продольной», а модель, соответствующую сечению плоскостью z = const, – «поперечной». Двумерные приближения предполагают формально бесконечную протяженность ускорительной системы в третьем направлении. Но в моделях учитывается «эффективная» протяженность системы в данном направлении, которая в значительной степени определяет процесс перекачки энергии из внешней электрической цепи в кинетическую энергию лайнера. Поперечное сечение имеет две оси симметрии, поэтому задача решается в одной четвертой части всего сечения; продольное сечение имеет одну ось симметрии, поэтому расчетная область соответствует половине сечения. Электромагнитные поля описаны с помощью системы уравнений Максвелла в МГДприближении. Для описания внешних цепей использованы уравнения Кирхгоффа. Из-за ограниченности объема экспериментальных данных существует значительная неопределенность в том, как ведет себя материал, из которого изготовлена пластина. Поэтому применены три способа описания лайнера [3–4]: он рассматривается как термоупругое тело, как упругопластическое тело (в обоих случаях использованы модели для произвольных деформаций) или как вязкая несжимаемая жидкость. Для математических моделей созданы численные модели, основанные на применении метода Галеркина с использованием конечных элементов первого и второго порядка, и реализованные в виде программного комплекса. Экспериментальные результаты. Процесс ускорения лайнера занимает короткий промежуток времени (порядка сотни микросекунд), а в результате торможения большая часть ленты превращается в порошок. Одними из наиболее важных экспериментальных результатов являются фотографии теневой съемки лайнера в процессе его движения, приведенные в работе [2]. Данные фотографии показывают, что профиль лайнера вплоть до момента сжатия магнитного потока остается относительно тонким и пластины совершают практически плоскопараллельное движение. В [2] также приведены данные об эффективной ширине лайнера, полученные по измерению «следов» пластины лайнера, падающей на клиновые скосы, расположенные в зоне закрепления концов ленты. Следы пластины заметно приближаются к средней плоскости витка по мере движения ленты, т.е. эффективная ширина лайнера уменьшается. Рис. 2. Продольная модель. Положение пластического (жидкого) лайнера в процессе движения (для половины продольного сечения) Результаты расчетов. Проведенные расчеты позволяют сделать следующие выводы: поведение жидкого и пластического лайнеров соответствует фотографиям, полученным во время эксперимента. В продольном сечении лента лайнера ложится на поверхность призмы, при этом центральная часть ленты совершает плоскопараллельное движение и не претерпевает больших продольных изгибов (рис. 2, оттенки серого отражают величину вертикальной компоненты скорости). При качественном сходстве результатов двух моделей наблюдаются Математическое моделирование движения пластинчатого лайнера… количественные различия: скорость жидкого лайнера больше скорости пластического тела. В поперечном сечении ширина лайнера уменьшается за счет деформации его краев, но сам процесс деформации для двух моделей происходит по-разному: в жидком лайнере наблюдается образование галтелей на краях; края пластического лайнера образуют отчетливый загиб. Процесс деформации существенно зависит от соотношения ширины лайнера и индуктора. На рис. 3 показано движение пластического лайнера, ширина которого превышает ширину индуктора; поведение упругого лайнера не соответствует экспериментальным данным: по пластине бегут упругие волны; в продольном сечении лента контактирует только с верхней частью призмы, под действием упругих сил пластина останавливается и начинает двигаться в противоположном направлении. В поперечной модели, несмотря на то, что форма ленты для различных моделей Рис. 3. Положение лайнера в разные существенно отличается, интегральные моменты характеристики (скорость и координаты времени (сверху вниз), показана половина центра масс лайнера, интегральная сила одной ленты Лоренца и т.д.) очень хорошо совпадают. Такие значительные деформации концов лайнера связаны с тем, что плотность тока в пластине распределена существенно неравномерано: наибольшая плотность сосредоточена именно на краях пластины. Расчеты для продольной модели показали, что, как и было предсказано в [2], максимальные напряжения в упругопластическом лайнере сосредоточены вблизи движущейся границы контакта лайнера и призмы. На участке ленты, растянутом по призме, достигнуто максимально возможное для данного материала значение напряжение; именно на этом участке происходит пластическое деформирование лайнера, в то время как в центральной части ленты пластические деформации не образуются. Для поперечной модели замыкание цепи лайнера приводит, как и полагалось из исходных предпосылок [2], к появлению сжимаемого магнитного потока внутри лайнера и полному торможению пластины (за исключением ее краев в жидком и пластическом лайнере). Для продольной модели в силу геометрических особенностей расчетной области захвата потока магнитного поля из контура ускорения не происходит. Но сжимаемый пластинами лайнера магнитный поток можно создать искусственно с помощью задания начального напряжения U A0 на обкладках конденсатора в цепи лайнера. Таким образом, данная модель также описывает процесс торможения ленты магнитным полем и этим процессом сравнительно легко управлять. Более подробно полученные результаты описаны в [2–4]. Работа выполнена при частичной финансовой поддержке РФФИ (проект № 09-01-00151). СПИСОК ЛИТЕРАТУРЫ 1. Азизов Э.А., Алиханов С.Г., Велихов Е.П. и др. // Вопросы атомной науки и техники. Сер. «Термоядерный синтез». 2001. №. 3. С. 3. 2. Галанин М.П., ЛотоцкийА.П. // Радиотехника и электроника. 2005. Т. 50. № 2. С. 256. 3. Галанин М.П., Лотоцкий А.П., Родин А.С., Щеглов И.А. // Препринт ИПМ им. М.В. Келдыша РАН. № 58. М., 2009. 4. Галанин М.П., Лотоцкий А.П., Родин А.С. // Препринт ИПМ им. М.В. Келдыша РАН. № 57. М., 2009.