Методические указания по выполнению домашнего
advertisement

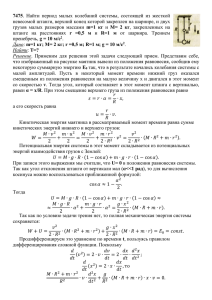
Министерство образования и науки Российской Федерации Федеральное агентство по образованию Московский государственный технологический университет “СТАНКИН” Учебно-методическое объединение по образованию в области автоматизированного машиностроения (УМО АМ) С.А. Еленев В.Г. Новиков Методические указания по выполнению домашнего индивидуального задания по статике Москва 2006 1 Данные методические указания является приложением к учебному пособию «СТАТИКА», разработанному С.А. Еленевым, В.Г. Новиковым, Г.И. Шевелевой и выпущенному Издательским Центром МГТУ «Станкин» в 2001 году. В пособии «СТАТИКА» содержится теоретический материал, примеры решения задач и 30 индивидуальных заданий. Каждое индивидуальное задание представляет собой комплект из 7-ми задач по следующим темам: 1. Равновесие твердого тела при действии плоской системы сил. 2. Равновесие плоской механической системы, состоящей из нескольких тел. 3. Степень статической неопределимости плоских механических систем. 4. Равновесие механической системы под действием пространственной системы сил. 5. Приведение пространственной системы сил к центру. 6. Центр тяжести материальной линии. 7. Центр тяжести плоской материальной пластины. Студент должен получить от преподавателя номер индивидуального задания и решить 7 задач (по одной задаче на каждую из перечисленных тем), условия которых приведены в пособии «СТАТИКА». Ниже приведен пример выполнения индивидуального задания № 30. 1. Равновесие твердого тела при действии плоской системы сил Задача 1.30. Считая указанную на Рис. 1 к задаче 1.30 нагрузку известной, составить уравнения равновесия для определения реакций. Длины отрезков AB,AC,CD заданы. 2 D F 600 M qmax C A B Рис.1 Решение. Рассмотрим равновесие тела ABCD. Распределенную по длине BC нагрузку заменим равнодействующей Q . По величине 1 1 Q qmax BC и приложена на расстояние BC от точки В. (Рис. 2) 2 3 Y D F RB 600 M YA A XA qmax C B Х Q Рис.2 Выбираем систему координат X,Y и заменяем наложенные на тело связи их реакциями: в неподвижном шарнире A- силами X A , Y A в идеальном стержне B - силой R B . Эти реакции ( X A , YA , RB ) предварительно направляем в положительные стороны координатных осей. Если величины реакций окажутся отрицательными, то это будет означать, что их истинные направления противоположны. Система сил, приложенных к данному телу, эквивалентна нулю, т.е. ( F , M , Q, X A , YA , RB )~0. 3 Так как число неизвестных ( X A , Y A , RB ) равно трем и число уравнений равновесия данной плоской произвольной системы равно трем, то задача статически определима. Составляем уравнения равновесия: F F X 0; Y 0; Y A RB F cos 60 0 Q 0 M A X A F cos 30 0 0 2 0; M F cos 30 0 CD F cos 60 0 AC Q AC BC RB AB 0 3 2. Равновесие плоской механической системы, состоящей из нескольких тел Задача 2.30. Составить уравнения равновесия для определения опорных реакций и давления во внутренних шарнирах A,B,C. (Рис.1 к заданию 2.30) Нагрузка и размеры указанны на рисунке. 2L 2L 2L 2L A D E B M 3h P q max C Рис.1 Решение. Система, изображенная на Рис.1 к задаче 2.30, находится в равновесии и состоит из четырех тел AD, DC, CE и BE, соединенных внутренними шарнирами D, C, E. Заменим заделки их реакциями: силами X A , YA , X B , YB и реактивными моментами M A , M B . Расчленим систему в шарнирах D,C,E и заменим их внутренними реактивными силами X C , YC , X C , YC , X D , YD , X D , YD , X E , YE , X E , YE По третьей аксиоме механики (действие равно противодействию) реакции X C X C , YC YC , X D X D , YD YD , X E X E , YE YE . 4 Распределенную нагрузку, приложенную к телу DC заменим одной силой Q - равнодействующей. Причем сила Q расположена на расстоянии q DC 3 1 qmax h ; DC h от точки С и равна: Q max 2 2 3 Для каждого из четырех тел системы составим по три уравнения. Условие равновесия тела AD (Рис.2 к задаче 2.30) X 0; X D X A 0 Y 0; YD YA 0 M A 0; M A YD 2 L 0 Y YD YA A 2L XA MA D XD X Рис.2 Условие равновесия тела DC (Рис.3 к задаче 2.30) X 0; X Q X 0 Y 0; Y Y 0 M 0; X 3h Q h 0 D C C C D D Y X D D YD YС q C Q XС 2h h X Рис.3 Условие равновесия тела CE (Рис.4 к задаче 2.30) 5 X 0; X X 0 Y 0; Y Y P 0 M 0; Y 4L X 3h M P 2L 0 E C E C C E E Y 2L YE 2L X E E 3h M P X С C YС X Рис.4 Условие равновесия тела BE (Рис.5 к задаче 2.30) X 0; X X 0 Y 0; Y Y 0 M 0; M Y BE 0 B E B B E B E Y YB X E E YE 2L XB X B Ì Â Рис.5 Полученная система двенадцати уравнений позволяет определить все двенадцать неизвестных реакций. 3. Степень статической неопределимости плоских механических систем Задача 3.30. Определить степень статической неопределимости плоской механической системы (Рис.1 к задаче 3.30) относительно опорных реакций. 6 A C B Рис.1 Решение. Рассмотрим равновесие тела (или тел), на которое действует активная нагрузка. В данном случае три силы и один момент действуют на одно тело ACB. В точках A и C тело опирается на ненагруженные стержни. Следовательно, в них действуют реакции стержней RA и RC (Рис.2), а в точке В опорой является неподвижный шарнир В с двумя реактивными силами X B , YB . RA A C RC YB B Рис.2 XB Таким образом, мы можем составить лишь три уравнения равновесия тела ABC, а неизвестных реактивных сил – четыре ( X B , YB , RA , RC ). Следовательно, в данной задаче степень статической неопределимости равна единице. N=4-3=1 Ответ: N=1 7 4. Равновесие механической системы под действием пространственной системы сил Задача 4.30. Составить уравнения равновесия тяжелой прямоугольной пластины АВСD весом Р, к которой приложена сила F. Пластина удерживается в равновесии при помощи сферического шарнира А, цилиндрической петли D и нити в точке В (рис.1 к задаче 4.30). Решение. Приложим в центре тяжести пластины силу Р тяжести и освободим пластину от связей, заменив их силами реакций (рис.2). Действие сферического шарнира А заменяем силами х А , у А , z А . Петлю уD , zD , заменяем силами расположенными в плоскости, перпендикулярной оси АD возможного вращения пластины. Нить заменяем силой Т натяжения, направленной вдоль нити и приложенной в точке В. Так как пластина находится в равновесии, то система сил, на неё действующая , является Рис.1 уравновешенной: ( F, P, x А , у А , z А , у D , z D , Т ) 0. Составляем 6 уравнений равновесия твердого тела (пластины АВСD), находящегося под действием пространственной системы сил: Х 0 ; ХА 0; У 0 ; У А У Д Т cos 30 F 0 ; 8 Z 0 ; Z А Z Д Т cos 60 Р 0 ; М у = 0; АВ Т cos 60 АВ 0 ; 2 АD Р z D АD 0 ; 2 М z 0 ; уD АD F АD 0 . М х = 0; Р Из составленных шести уравнений равновесия можно определить 6 неизвестных сил реакций: x А , у А , z А , у D , z D , Т . Рис.2 5. Приведение пространственной системы сил к центру Задача 5.30. На куб с длиной ребра, равной = 1 м, действует несколько сил, каждая из которых равна 1 Н, и несколько пар сил, моменты которых равны 1 Нм. Привести заданную систему сил к центру О (рис.1 к задаче 5.30). Решение. Привести заданную систему сил к центру О - это значит заменить заданную систему одной силой, равной главному вектору, и одной парой сил, момент которой равен главному моменту заданной системы сил, причем главный вектор и главный момент приложены в центре приведения (в точке О). Главный вектор Fгл равен геометрической сумме всех сил системы: 9 Fгл Fi F1 F2 F3 , или в проекциях на декартовы оси координат: Fхгл Fх F1х F2 х F3х 0 0 F3 1 Н ; Fугл Fу F1у F2 у F3у 0 F2 0 1 Н ; Fzгл Fz F1z F2 z F3z F1 0 0 1 Н . Величина главного вектора равна Fгл (Fхгл ) 2 (Fугл ) 2 (Fzгл ) 2 3 Н . Рис.1 Направление главного вектора в выбранной декартовой системе координат определяется направляющими косинусами: гл Fхгл 1 3 cos(F , i ) гл ; 3 3 F гл Fугл 1 3 ; cos(F , j) гл 3 3 F гл Fzгл 1 3 cos(F , k ) гл , 3 3 F где i , j, k орты координатных осей. Главный момент системы сил равен геометрической сумме векторовмоментов всех сил системы относительно центра приведения. Если в системе есть одна или несколько пар, то при приведении к центру нужно иметь в виду, что сумма векторов-моментов сил пары не зависит от положения центра, относительно которого она подсчитывается, и равна вектору-моменту этой пары. Поэтому, при вычислении главного момента вектор-момент пары сил следует вычислить по формуле: М гл М ( F ) М ( F ) М ( F ) М ( F ) М М 0 0 i 0 1 0 2 0 3 1 2, или в проекциях на оси координат: М хгл М х F2 М 2 cos 45 1 Ì ãë ó Ì ó F1 F3 Ì 1 Ì 2 2 2 2 2 2 cos 45 1 1 1 Нм ; 2 2 2 2 1 Íì ; 2 2 2 М zгл М z F3 1 Нм . 10 Величина главного момента равна Ì ãë 0 (Ì ) (Ì ãë 2 õ ) (Ì ãë 2 ó ) 4 2 2 Íì . ãë 2 z Направление главного момента в выбранной декартовой системе координат определяется направляющими косинусами: Ì ,i ) Ì ãë õ ãë 0 Ì , j) Ì ãë ó ãë 0 Ì ,k) Ì ãë z ãë 0 cos( Ì ãë 0 cos( Ì ãë 0 cos( Ì ãë 0 (2 2) 2 42 2 (2 2) 2 42 2 1 42 2 0,65 ; 0,65 ; 0,38 . Результаты приведения системы сил к центру О показаны Г гл R F на рис.2 к задаче 5.30.( ) Заметим, что куб не находится в равновесии, поскольку главный вектор и главный момент приложенной системы сил отличны от нуля. Рис.2 Вычислим скалярное произведение F ãë M ãë Fxãë M xãë FYãë M Yãë FZãë M Zãë . В данной задаче F ãë M ãë 0 , следовательно, система сил приводится к динамическому виду. 11 6. Центр тяжести плоской материальной линии Задача 6.30. В системе отсчета, указанной на рис.1 к задаче 6.30, определить координаты плоской материальной линии, состоящей из нескольких частей. Удельный вес всех частей одинаков, размер а считать известным. Решение. Для определения координат центра тяжести (точки С) используем метод разбиения. Рис.1 «Разобьем» заданную материальную линию на четыре части: 1 и 4 четверти окружности, а 2 и 3 - отрезки прямых (рис.2). Координаты центра тяжести заданной материальной линии в указанной на рис.1 к задаче 6.30 декартовой системе координат рассчитываются по формулам: хС уС где 1 , 2 , 3 , 4 1х С1 2 х С 2 3 х С 3 4 х С 4 1 2 3 4 1у С1 2 у С 2 3 у С 3 4 у С 4 1 2 3 4 - длины линий 1, 2, 3, 4; , , х С1 , у С1 и х С4 , у С 4 - координаты центров тяжести (С1 и С4) четвертей окружности; х С2 , у С 2 и х С 3 , у С 3 -- координаты центров тяжести (С2 и С3) отрезков 2 и 3. Центры тяжести С1 и С4 четвертей окружности лежат на биссектрисах прямых углов. Расстояние от центра окружности до центра тяжести четверти окружности равно ОС1 ОС4 а sin 2 2 , а 12 где а - радиус окружности, - угол (в радианах), равный половине центрального угла, стягивающего дугу окружности, в данном случае = 4. Центры тяжести С2 и С3 отрезков 2 и 3 лежат в серединах этих отрезков. Координаты центров тяжести линий 1, 2, 3, 4 равны: 2 2 2 2а х С1 ОС1 cos а ; 4 2 а а х С 2 0 , уС 2 ; х С3 , у С3 0 ; 2 2 2а ; 4 2а 2а , уС4 . у С1 ОС1 sin х С4 Определяем длины линий: 2а а 1 4 , 2 3 а . 4 2 Подставляя полученные выражения в расчетные формулы для координат центра тяжести линии, получаем: а . х С уС 2( 2) Рис.2 Замечание. Решение задачи значительно упрощается при использовании метода симметрии. Очевидно, что общий центр тяжести линий 1 и 4 лежит в точке О, а общий центр тяжести отрезков 2 и 3 лежит в точке С23 , находящейся в середине отрезка С2С3 (проекция точки С23 на a ось х отстоит от начала координат на расстоянии ). При этом расчетные 4 формулы упрощаются: ( 4 ) 0 ( 2 3 ) а / 4 а х С уС 1 . 1 2 3 4 2( 2) 13 7. Центр тяжести плоской материальной пластины Задача 6.60. Найти координаты центра тяжести плоской материальной фигуры (рис.1 к задаче 6.60). Удельный вес всех частей фигуры одинаков, размер а считать известным. Рис.1 к задаче 6.60 Решение. Координатная ось у является осью симметрии фигуры, следовательно, центр тяжести фигуры лежит на этой оси (хС = 0). Для решения задачи используем метод разбиения и метод отрицательных масс (отрицательных площадей). Представим фигуру состоящей из четырех частей (рис.2 к задаче 6.60): фигура 1 - треугольник с основанием 4а и высотой 2а, площадь которого равна S1 = 4а2; фигура 2 - полукруг радиуса а Рис.2 a 2 с отрицательной площадью S 2 ; 2 фигуры 3 4 - прямоугольники со сторонами а и 2а с площадями S3 S4 = 2а2. Положение центра тяжести всей фигуры определяется по формуле: уС S1у С1 (S2 ) у С 2 S3 у С 3 S4 у С 4 S1 (S2 ) S3 S4 . 14 Из рис.2 к задаче 6.60 видно, что 2 2 sin 2 sin( / 2) 4а у С1 а , уС2 а а , 3 3 3 / 2 3 у С 3 у С 4 а . Подставляя эти выражения в основную расчетную формулу, получаем положение центра тяжести фигуры на оси у: 2 à 2 4à 4à 2 à ( ) 2 2à 2 ( à ) 4à 3 2 3 óÑ . 2 16 à 2 2 4à ( ) 2 2à 2 15