ВОЗМОЖНЫЕ ВИДЫ ВЕКТОРНЫХ ДИАГРАММ ЗУБЧАТЫХ ПАР
advertisement

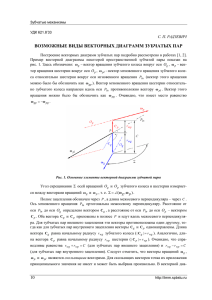
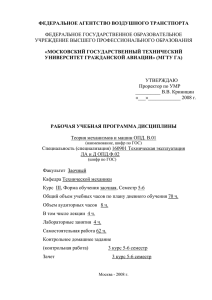
Зубчатые механизмы УДК 621.8’33 С. П. РАДЗЕВИЧ ВОЗМОЖНЫЕ ВИДЫ ВЕКТОРНЫХ ДИАГРАММ ЗУБЧАТЫХ ПАР Построение векторных диаграмм зубчатых пар подробно рассмотрено в работах [1, 2]. Пример векторной диаграммы некоторой пространственной зубчатой пары показан на рис. 1. Здесь обозначено: ωg вектор вращения зубчатого колеса вокруг оси Og , ω p вектор вращения шестерни вокруг оси O p , ω pl вектор мгновенного вращения зубчатого колеса относительно шестерни вокруг оси мгновенного вращения Pln (вектор этого вращения можно было бы обозначить как ω gp ). Вектор мгновенного вращения шестерни относительно зубчатого колеса направлен вдоль оси Pln противоположно вектору ω pl . Вектор этого вращения можно было бы обозначить как ω pg . Очевидно, что имеет место равенство ω gp ω pg . Рис. 1. Основные элементы векторной диаграммы зубчатой пары Угол скрещивания осей вращений Og и O p зубчатого колеса и шестерни измеряется между векторами вращений ω g и ω p , т. е. (ω g , ω p ) . Полюс зацепления обозначен через P , а длина межосевого перпендикуляра – через C . Ось мгновенного вращения Pln ортогональна межосевому перпендикуляру. Расстояние от оси Pln до оси Og определено вектором Cg , а расстояние от оси Pln до оси O p – вектором C p . Оба вектора Cg и C p приложены в полюсе P и идут вдоль межосевого перпендикуля- ра. Для зубчатых пар внешнего зацепления эти векторы противоположны один другому, тогда как для зубчатых пар внутреннего зацепления векторы Cg и C p однонаправлены. Длина вектора Cg равна начальному радиусу r wg зубчатого колеса ( | Cg | r wg ). Аналогично, длина вектора C p равна начальному радиусу r wp шестерни ( | C p | r wp ). Очевидно, что справедливы равенства r wg r wp C (для зубчатых пар внешнего зацепления) и r wg r wp C (для зубчатых пар внутреннего зацепления). Следует отметить, что векторы вращений ω g , ω p и ω pl являются скользящими векторами. Для скользящих векторов точка их приложения принципиального значения не имеет и может быть выбрана произвольно. В векторной диа- 10 http://tmm.spbstu.ru Возможные виды векторных диаграмм зубчатых пар грамме зубчатых пар (см. рис. 1) векторы ω g , ω p и ω pl приложены в точках на линии вдоль межосевого перпендикуляра – так удобнее. В качестве еще одного примера на рис. 2 показана векторная диаграмма винтовой зубчатой пары, наложенная непосредственно на эту пару. Рис. 2. Векторная диаграмма винтовой зубчатой пары Важным представляется выявление всех возможных видов векторных диаграмм зубчатых пар, разработка их научной классификации и последующий анализ всех возможных видов векторных диаграмм с целью рационального использования потенциальных возможностей зубчатых пар разного вида. Ранее выполненное исследование [1, 2] позволяет подразделить векторные диаграммы зубчатых пар на три основные вида, а именно, на векторные диаграммы зубчатых пар: внешнего зацепления; псевдо-реечного зацепления; внутреннего зацепления. Эти три основных вида векторных диаграмм зубчатых пар приведены на рис. 3. Они формируют первый уровень научной классификации возможных видов векторных диаграмм зубчатых пар (рис. 4). Здесь векторным диаграммам, показанным на рис. 3, a, b и c, присвоены номера 1, 2 и 3 соответственно. Аналитическим признаком векторных диаграмм внешнего зацепления (рис. 3, a) является выполнение неравенства cr . Критическое значение cr угла находится из условия перпендикулярности векторов вращений ω g и ω pl , т. е. из условия ω pl ω g . Исходя из выполнения этого условия ( ω pl ω g ), для расчета угла cr выведена формула 2 2 ω p ωg cr arcsin ωp Теория Механизмов и Машин. 2009. №2. Том 7. . (1) 11 Зубчатые механизмы Частота вращения зубчатого колеса ( ωg | ωg | ) не превышает частоту вращения шестерни ( ω p | ω p | ), т. е. всегда имеет место неравенство ωg ω p . С учетом этого неравенства находятся наибольшее и наименьшее критические значения угла перекрещивания осей вращений зубчатого колеса и шестерни. a) b) c) Рис. 3. Три основные разновидности векторных диаграмм зубчатых пар Если ω g ω p (передаточное число u зубчатой пары в этом случае равно единице ( u ω p / ω g 1 ), тогда из формулы (1) следует, что cr 180 . Если же ω g равно нулю ( g 0 ), тогда cr 90 . Таким образом критическое значение угла cr находится в интервале 90 cr 180 . (2) Для зубчатых пар внешнего зацепления (рис. 3, a) интервал допускаемых значений угла , заданный неравенством (2), может быть разделен на три угловых сектора. Параметры этого разбиения задаются неравенствами 90 cr , 90 , 90 180 . (3) В первом случае ( 90 cr ) сумма углов ( g 90 ) и p пространственной зубчатой пары равна некоторому тупому углу. Здесь угол между векторами вращений ω g и ω pl обозначен через g , а угол между векторами вращений ω p и ω pl обозначен через p . Векторным диаграммам зубчатых пар этого вида присвоен номер 1.1. Во втором случае ( 90 ) сумма углов ( g 90 ) и p пространственной зубчатой пары равна прямому углу. Векторным диаграммам зубчатых пар этого вида присвоен номер 1.2. И, наконец, в третьем случае ( 90 180 ) сумма углов ( g 90 ) и p пространственной зубчатой пары равна некоторому острому углу. Векторным диаграммам зубчатых пар третьего вида присвоен номер 1.3. Возможные виды пространственных зубчатых пар внешнего зацепления исчерпываются тремя видами, обозначенными 1.1, 1.2 и 1.3. Эти три вида векторных диаграмм входят во второй уровень классификации возможных видов векторных диаграмм зубчатых пар (рис. 4). 12 http://tmm.spbstu.ru Возможные виды векторных диаграмм зубчатых пар Рис. 4. Классификация возможных видов векторных диаграмм зубчатых пар ( * 180 cr ) Второй уровень классификации не исчерпывается только векторными диаграммами видов 1.1, 1.2 и 1.3. Для псевдо-реечных пар (рис. 3, b), так же как и для зубчатых пар внутреннего зацепления (рис. 3, c) могут быть составлены соответствующие векторные диаграммы, относящиеся ко второму уровню классификации. В отличие от пространственных зубчатых пар внешнего зацепления, возможность варьирования углом в псевдо-реечной передаче жестко ограничена. Характерным признаком псевдо-реечной передачи является выполнение равенства cr . Поэтому второй уровень классификации дополнен единственно возможной векторной диаграммой пространственной псевдо-реечной передачи, которой присвоен номер 2.1 (см. рис. 4). Для пространственных зубчатых пар внутреннего зацепления могут быть построены векторные диаграммы трех видов, аналогично тому, как это имеет место для пространственных зубчатых пар внешнего зацепления. Пространственным зубчатым парам внутреннего зацепления присвоены номера 3.1, 3.2 и 3.3 соответственно (см. рис. 4). Таким образом, второй уровень классификации векторных диаграмм образован векторными диаграммами семи видов 1.1, 1.2, 1.3, 2.1, 3.1, 3.2 и 3.3 (см. рис. 4). Как и в первом уровне, векторные диаграммы всех зубчатых пар, входящих во второй, соответствуют пространственным зубчатым парам. Каждая из семи векторных диаграмм второго уровня характеризуется, в частности, двумя важными параметрами: (a) углом скрещивания осей вращений зубчатого колеса и шестерни и (b) межосевым перпендикуляром C некоторой длины. Представляет интерес изучение векторных диаграмм зубчатых пар в случаях, когда один из двух параметров ( Теория Механизмов и Машин. 2009. №2. Том 7. 13 Зубчатые механизмы или C ) принимает некоторое экстремальное значение. При таком подходе формируется третий уровень классификации возможных видов векторных диаграмм зубчатых пар. Продолжим рассмотрение вопроса о классификации векторных диаграмм со случаев, при которых C 0 . Для этого в каждой из семи векторных диаграмм второго уровня положим, что пространственная зубчатая пара общего вида упрощается к виду, для которого оси вращений зубчатого колеса и шестерни пересекаются одна с другой. По своей природе, зубчатые пары такого вида остаются пространственными, т. к. зацепление профилей зубьев происходит на сфере с центром в точке пересечения осей Og и O p . Последнее дает основание называть зубчатые пары такого типа сферическими1. Возможно только семь видов векторных диаграмм сферических зубчатых пар. По аналогии с векторными диаграммами второго уровня, сферическим зубчатым парам очевидным путем присвоены номера 1.1.1, 1.2.1, 1.3.1, 2.1.1, 3.1.1, 3.2.1 и 3.3.1 (см. рис. 4). Если длина межосевого перпендикуляра не равна нулю ( C 0 ), то возможные различные виды зубчатых пар будут отличаться величиной угла . Как не трудно видеть, есть только шесть видов зубчатых пар такого типа: 1.1.2, 1.2.2, 1.3.2, 3.1.2, 3.2.2 и 1.3.2. Все они являются винтовыми зубчатыми парами. В винтовых зубчатых парах зубчатые венцы могут располагаться симметрично относительно межосевого перпендикуляра или на некотором удалении от него. В любом случае, эти зубчатые пары не перестают быть винтовыми зубчатыми парами. Векторные диаграммы сферических и винтовых зубчатых пар формируют третий уровень классификации (см. рис. 4). Этот уровень образован векторными диаграммами тринадцати видов, каждому из которых присвоен соответствующий номер: 1.1.1, 1.1.2, 1.2.1, 1.2.2, 1.3.1, 1.3.2, 2.1.1, 3.1.1, 3.1.2, 3.2.1, 3.2.2, 3.3.1, 3.3.2. Если рассматривать зубчатые пары с параллельными осями ( 180 ), для которых C 0 , то несложный анализ показывает, что физически возможно только два варианта зубчатых пар такого вида, а именно: 1.3.2.1 и 3.3.2.1 (см. рис. 4). Эти зубчатые пары соответствуют цилиндрическим зубчатым парам внешнего (1.3.2.1) и внутреннего (3.3.2.1) зацепления. И последнее, если допустить, что ωg 0 , цилиндрическая зубчатая пара вида 1.3.2.1, так же как и пара вида 3.3.2.1, вырождается в реечную пару 1.3.2.1.1 (либо 3.3.2.1.1) (см. рис. 4). Из разработанной классификации естественно следуют три возможных пути образования реечной пары: 1.3.2.1.1, 3.3.2.1.1 и 2.1.1.1. Третий путь образования реечной зубчатой пары как вырожденного случая псевдо-реечной пары становится очевидным, если допустить, что в псевдо-реечной паре ωg 0 . Последний из рассмотренных вариантов образования реечной пары (2.1.1.1) предпочтительнее. Он позволяет прийти к реечной паре более коротким путем – уже на четвертом уровне, а не на пятом, как в случаях 1.3.2.1.1 и 3.3.2.1.1 (см. рис. 4). Поэтому варианты 1.3.2.1.1 и 3.3.2.1.1 из рассмотрения исключаются. Реечная зубчатая пара 2.1.1.1 расположена в четвертом уровне классификации возможных видов векторных диаграмм зубчатых пар. В целом, разработанная классификация возможных видов векторных диаграмм зубчатых пар представлена на рис. 4. Она может быть использована для анализа работы отдельных зубчатых пар, для синтеза кинематических цепей в т. ч. и при разработке CAD/CAM систем соответствующего назначения. Классификация (см. рис. 4) позволяет формализовать информацию о зубчатых парах и представить ее в форме, удобной для обработки в компьютере. Одним из очевидных путей развития этой классификации является возможность разра- 1 Широко распространенное название “конические зубчатые пары” применительно к сферическим зубчатым парам, по мнению автора, неудачно. 14 http://tmm.spbstu.ru Возможные виды векторных диаграмм зубчатых пар ботки на ее основе научной классификации собственно зубчатых пар2 и впоследствии классификации возможных видов зубчатых колес, что имеет важное прикладное значение как для конструирования зубчатых передач, так и для разработки методов и инструментов для обработки зубчатых колес. Обсуждаемый векторный подход к представлению зубчатых пар полезен не только тем, что его применение позволяет научно классифицировать возможные виды зубчатых пар. Возможности использования векторного подхода значительно шире. В частности, векторное представление зубчатых пар полезно при разработке определения термина “зубчатая пара”. С одной стороны здесь, казалось бы, все ясно: зубчатая пара – это смонтированная на стойке механическая структура, состоящая из двух находящихся в зацеплении зубчатых колес, имеющих возможность вращения вокруг своих осей и предназначенная для передачи и трансформации движения от одного звена к другому. Как будет показано ниже, такое определение понятию “зубчатая пара” не является завершенным и потому допускает по крайней мере двоякое толкование. В качестве примера рассмотрим зубчатую передачу, схематически показанную на рис. 5. Эта передача известна автору из [3], где указано, что зубчатая передача такой конструкции разработана в МВТУ им. Н. Э. Баумана. Не вдаваясь в детали, отметим, что особенностью зубчатой передачи внешнего зацепления (см. рис. 5) является возможность передачи вращения между двумя осями без изменения направления вращения входного и выходного звеньев (см. рис. 1.22 на С. 42 в [3]), т. е. противоположно тому, что имеет место в зубчатых парах обычной конструкции. Аналогичное справедливо по отношению к подобным зубчатым передачам внутреннего зацепления (см. рис. 1.23 на С. 43 в [3]), особенностью которых является изменение направления вращения входного и выходного звеньев, т. е. опять-таки противоположно тому, что имеет место в обычных зубчатых парах, для которых разработано векторное представление в форме [1] и [2]. Логично предположить, что обычные зубчатые пары и зубчатые передачи вида (см. рис. 5) – разные по природе. Это различие удобно продемонстрировать, используя для этой цели векторное представление зубчатых пар. Здесь уместно вспомнить, что прародителями обычных зубчатых пар были не только аналоги цевочных передач, но и диски трения. Вращение от одного из двух поджатых один к другому фрикционных дисков передается за счет сил трения. Силы трения в этом случае могут быть интерпретированы как результат зацепления микронеровностей на рабочих поверхностей дисков. Естественно, чтобы увеличить плотность мощности, передаваемой дисками трения, требуется увеличить силу трения между дисками, увеличить размеры и прочность каждой микронеровности. Таким путем пришли к зубчатым колесам сначала с некоторой неконтролируемой формой профиля зубьев, что впоследствии позволило оптимизировать геометрию зубьев и прийти, в частности, к эвольвентному зацеплению. Для дальнейшего рассмотрения важно то, что, как и в дисках трения, для передачи вращения в обычных зубчатых парах используется сила, линия действия которой перекрещивается под прямым углом с осью зубчатого колеса/шестерни. Именно на этом принципе сконструированы зубья обычных зубчатых пар: зубья колес проектируются так, чтобы для передачи вращения максимально использовать именно тангенциальную составляющую силы трения. Вследствие нерегулярности микронеровностей, направленная вдоль оси составляющая силы от каждой микронеровности нерегулярна, а их сумма от всех взаимодействующих микронеровностей практически равна нулю (направленные вдоль оси составляющие силы практически полностью уравновешивают себя). Последнее очевидно настолько, что, с точки 2 Для этого, в частности, необходим критерий, позволяющий отличать одну от другой зубчатые пары, векторные диаграммы которых сходны. Например, (a) винтовые зубчатые пары от червячных пар; (b) винтовые зубчатые пары, составленные из цилиндрических колес, от аналогичных пар, составленных из конических колес и т.п. Теория Механизмов и Машин. 2009. №2. Том 7. 15 Зубчатые механизмы зрения автора, не требует какой-либо графической иллюстрации. Направленная вдоль оси зубчатого колеса составляющая силы часто остается без заслуживающего того внимания. Рис. 5. Зубчатая передача [3] Перейдем к рассмотрению вопроса о разложении нагрузки в зубчатой паре. Результирующая сила F в зубчатой паре ортогональна оси мгновенного вращательного движения Pln (рис. 6, a). В плоскости, проходящей через вектор F и межосевой перпендикуляр, век- тор F разложен на две составляющие F r и F t . Составляющая F r направлена вдоль межосевого перпендикуляра. Эту составляющую часто называют радиальной силой. Составляющая F r силы F вращение не передает. Вторая составляющая F t перпендикулярна оси мгновенного вращения Pln . Именно эта составляющая передает вращение в зубчатой паре. В плоскости, перпендикулярной межосевому перпендикуляру, действующая на зуб колеса составляющая F t представлена в виде суммы двух компонент F tg и F ag (рис. 6, b). Составляющая F tg перекрещивается под прямым углом с вектором вращения ω g (с осью вращения зубчатого колеса Og ). Именно эта составляющая передает вращение в зубчатой паре обычной конструкции. Составляющая F ag направлена параллельно вектору вращения ω g (параллельно оси зубчатого Og ). Эта составляющая вращение не передает и в зубчатой паре обычной конструкции обычно является вредной. Далее в плоскости, перпендикулярной межосевому перпендикуляру, действующая на зуб шестерни составляющая F t представлена в виде суммы двух компонент F tp и F ap (рис. 6, c). Составляющая F tp перекрещивается под прямым углом с вектором вращения ω p (с осью вращения шестерни O p ). Именно эта составляющая передает вращение в зубчатой паре обычной конструкции. Составляющая F ap направлена параллельно вектору вра- 16 http://tmm.spbstu.ru Возможные виды векторных диаграмм зубчатых пар щения ω p (параллельно оси шестерни O p ). Она не передает вращение зубчатой паре обычной конструкции и обычно является вредной. a) b) c) Рис. 6. Разложение нагрузки в зубчатой паре В зубчатых парах обычной конструкции зубья колеса и шестерни проектируются так, чтобы максимально эффективно передавать вращение за счет составляющих F tg и F tp . Вместе с тем, нет физического запрета на то, чтобы вращение передавалось за счет составляющих F ag и F ap . Именно на этом принципе работает передача, показанная на рис. 5. Зубья передачи спроектированы так, чтобы максимально эффективно передавать вращение за счет составляющих F ag и F ap . Очевидно, что зубчатые пары обычной конструкции и зубчатые передачи вида (см. рис. 5) отличаются принципом передачи вращения. Поэтому векторные диаграммы, разработанные для обычных зубчатых пар, неприменимы для передач вида (см. рис. 5). Для последних может быть разработан свой вид векторного представления. И последнее, рассмотрение принципа передачи движения в зубчатых парах обычной конструкции и в зубчатых передачах вида (см. рис. 5) позволяет уточнить приведенное выше определение понятию зубчатая пара: Зубчатая пара – это смонтированная на стойке механическая структура, состоящая из двух находящихся в зацеплении зубчатых колес, имеющих возможность вращения Теория Механизмов и Машин. 2009. №2. Том 7. 17 Зубчатые механизмы вокруг своих осей и предназначенная для передачи и трансформации движения от одного звена к другому за счет тангенциальной составляющей результирующей силы взаимодействия зубьев колес. Зубчатые передачи вида (см. рис. 5) не следует называть зубчатыми парами в общепринятом смысле этого термина. Для них следует предложить другое название. Выводы В статье разработана научная классификация возможных видов векторных диаграмм зубчатых пар. Классификация может быть использована для анализа работы отдельных зубчатых пар, для синтеза кинематических цепей, в т. ч. и при разработке CAD/CAM систем соответствующего назначения. Классификация позволяет формализовать информацию о зубчатых парах и представить ее в форме, удобной для обработки в компьютере. Одним из очевидных путей развития этой классификации является возможность разработки на ее основе научной классификации собственно зубчатых пар и впоследствии классификации возможных видов зубчатых колес, что имеет важное прикладное значение как для конструирования зубчатых передач, так и для разработки методов и инструментов для обработки зубчатых колес. Выполненный анализ сил, действующих в зубчатой паре, позволил уточнить определение понятия “зубчатая пара”. СПИСОК ЛИТЕРАТУРЫ 1. 2. 3. Радзевич С.П. Векторное представление зубчатых пар. Часть 1 // Теория механизмов и машин. 2008, №2(12), С. 74–81. Радзевич С.П. Векторное представление зубчатых пар. Часть 2 // Теория механизмов и машин. 2009, №1(13), С. 17–26. Dooner, D.B, Seireg, A.A. The Kinematic Geometry of Gearing: A Concurrent Engineering Approach, John Willey & Sons, Inc., New York, 1995, 450 p. Поступила в редакцию 13.04.2009 18 http://tmm.spbstu.ru