Матем-анализ
advertisement

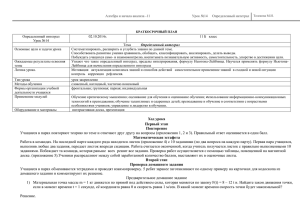
Интегральное исчисление функции нескольких переменных. § 1. Двойной интеграл. 1. Геометрическая задача, приводящая к понятию двойного интеграла. Пусть на замкнутой области D R² задана непрерывная функция z = f (x;y), f (x;y) ≥ 0 для ( x; y ) D . В системе координат 0XYZ функция z = f (x;y) задает некоторую поверхность. Из каждой граничной точки области D восстанавливаем перпендикуляры к плоскости 0XY до пересечения с поверхностью z = f (x;y). При этом в пространстве R³ получаем объемное цилиндрическое тело, у которого нижним основанием является область D, верхним – часть поверхности z = f (x;y) и боковая поверхность параллельна оси 0Z. Такое тело будем называть цилиндроидом. Ставим задачу: вычислить объем этого цилиндроида (рис. 1). С этой целью проведем следующие операции: а) область D разделим на n частей (произвольно) – D1 , D2 , D3 ,...Dn ; б) обозначим площади каждой из этих частей S1 , S2 , S3 , , Sn ; в) на каждой из частей разбиения рис. 1 области D выберем точку M i ( xi ; yi ) и строим ряд цилиндрических «столбиков», имеющих основаниями Di и высоты hi f ( M i ); г) вычислим объемы полученных «столбиков»: Vi f ( xi ; yi )Si д) в результате построено тело, состоящее из n «столбиков», объем которого равен: n n V f ( x ; y )S i i 1 i i 1 i приближенно равное объему цилиндроида. n е) для повышения точности равенства: V Vi будем уменьшать размеры i 1 частей разбиения области D, увеличивая их количество, то есть n → ∞, но при условии стремления к нулю max ∆Si, стягивающегося в точку. Тогда можно записать точное равенство: ж) этот предел и дает объем заданного цилиндроида. 2. Определение двойного интеграла. n Определение 1. Сумма f ( x ; y )S i 1 i i i , построенная в п. 1 называется интегральной суммой для функции f (x; y) на замкнутой области D. Определение 2. Двойным интегралом от функции f (x;y) по замкнутой n области D называется предел интегральной суммы условиях: а) n → ∞ и max ∆Si → 0 (стягиваясь в точку); f ( x ; y )S i 1 i i i при б) этот предел существует и не зависит ни от способа разбиения области D на части, ни от выбора на этих частях точек M i ( xi ; yi ) Di Обозначение двойного интеграла: Теорема (достаточное условие существования двойного интеграла). Если в замкнутой области D R² функция z = f (x;y) непрерывна, то двойной интеграл от этой функции по области D существует. 3. Геометрический смысл двойного интеграла. 1) Если z = f (x;y) непрерывна в области D R² и f (x;y) ≥ 0, то двойной интеграл от этой функции по области D равен объему цилиндроида, у которого нижнее основание – область D OXY , верхнее – часть поверхности z = f (x;y) и боковая поверхность цилиндроида параллельна 0Z, т.е. 2) Если f ( x; y ) 1 для любых ( x; y ) D , то двойной интеграл от z = 1 по области D равен площади области D: S D dxdy D 4. Основные свойства двойного интеграла. 1) Пусть функция z = f (x;y) непрерывна в области D R², причем D D1 D2 , тогда D1 D2 Это свойство, как и последующие, можно доказать путем рассмотрения интегральных сумм и затем перехода к пределам. 2) Постоянный множитель выносится за знак двойного интеграла: k f ( x; y)dS k f ( x; y)dS D D 3) Двойной интеграл от суммы конечного числа функций равен сумме двойных интегралов от этих функций: 4) Если для двух непрерывных в области D функций f(x;y) и g(x;y) выполняется неравенство f (x;y) ≤ g (x;y), то f ( x; y)ds g ( x; y)ds D D 5) Теорема (о среднем значении двойного интеграла). Если функция z = f (x;y) непрерывна в замкнутой области D, то внутри ( x0 ; y0 ) , в которой выполняется области D найдется, хотя бы одна точка равенство: f ( x; y)ds f ( x ; y ) S 0 0 D, D где SD – площадь области D. Доказательство: По свойству непрерывной функции в замкнутой области, функция z = f (x;y) в области D достигает своих наименьшего (m) и наибольшего (M) значений. Значит: m ≤ f (x;y) ≤ M для ( x; y ) D . ( xi ; yi ) D можно записать m f ( xi ; yi ) M , Тогда для всех где Умножая последнее неравенство на ∆Si > 0, получим: m Si f ( xi ; yi )Si M Si Суммируем все n неравенств n n n m S f ( x ; y )S M S i 1 i i 1 i i i i 1 i Вынесем m и М за знаки сумм (как постоянные величины) и перейдем к пределам при n → ∞ и max ∆Si → 0 (стягиваясь в точку): Ссылаемся на определение двойного интеграла и получаем: m f ( x; y)ds D SD M По свойству непрерывной в замкнутой области функции, функция z = f(x;y) в области D принимает все промежуточные значения между наименьшим (m) и наибольшим (М) значениями. Следовательно, существует точка ( x0 ; y0 ) D , в которой: f ( x0 ; y0 ) f ( x; y)ds D SD S D f ( x; y)ds f ( x0 ; y0 ) S D D Теорема доказана. Геометрический смысл теоремы о среднем значении двойного интеграла. Если f (x;y) ≥ 0 в области D, то объем цилиндроида V f ( x; y )dS D можно заменить на объем цилиндра, у которого основаниями верхним и нижним будет область D и высотой f ( x0 ; y0 ) . 5. Вычисление двойного интеграла в декартовых координатах. Определение 1 Замкнутая область D называется правильной в направлении оси 0y (или 0x), если любая прямая, проходящая через внутреннюю точку области D и параллельная оси 0y (или 0x), пересекает границу области D только в двух точках. Рис.2 Рис.3 Рис.4 Рис.5 На рисунках: 2 – D правильная в направлении 0y; 3 – D правильная в направлении 0x; 4 – D правильная в направлении 0x, но неправильная в направлении 0y; 5 – D правильная в направлении 0y, но неправильная в направлении 0x. При вычислении двойного интеграла используют правила сведения этого интеграла к повторному. При этом область D должна быть правильной в направлении, например оси 0y и границы ее должны описываться непрерывными функциями, причем D и y 2 ( x ) - любого x a; b . y 1 ( x) - нижняя граница области верхняя граница области D, т.е. 1 ( x) 2 ( x) для Если эти условия на область D не выполняются, то ее разбивают на части, на которых эти условия выполняются, и интегрируют по каждой из частей, а затем результат суммируют. Далее рассматривают при некотором фиксированном значении x a; b интеграл от функции f (x;y) по y 1 ( x);2 ( x) : Тогда объем цилиндроида, который равен D 2 ( x ) f ( x; y )dxdy S ( x)dx f ( x; y )dy dx a a 1 ( x ) b b 2 ( x ) При этом f ( x; y )dy вычисляется при фиксированном 1 ( x) называется внутренним интегралом, а х. Он – внешним интегралом. интеграл. Его вычисление начинается с вычисления внутреннего интеграла при х = const, затем от полученной функции S(x) вычисляется внешний b интеграл S ( x)dx . a Рассмотрим случай сведения двойного интеграла к повторному, если область D правильная в направлении оси 0x и границы ее заданы непрерывными функциями: x=ψ2(y) - правая граница области D и x=ψ1(y) - левая граница области D, т.е. ψ1(y) ≤ ψ2(y) для любого y [c;d]. Далее рассматривают при некотором фиксированном значении y [c;d] интеграл от функции f (x;y) по x [ψ1(y);ψ2(y)] : Тогда объем цилиндроида, который равен: D При 2 ( y) f ( x; y )dxdy S ( y )dy f ( x; y )dx dy c c 1 ( y ) этом d d вычисляется при фиксированном значении y. Он называется внутренним интегралом, а внешним интегралом. Правило вычисления этого повторного интеграла аналогично: сначала вычисляют внутренний интеграл по х при y = const, затем – внешний интеграл по y. Замечание 1. Если область D является правильной в направлении обеих осей и границы описываются следующим образом: нижняя граница: y 1 ( x) ; верхняя граница: y 2 ( x) ; x [a;b]; левая граница: x 1 ( y) ; правая граница: x 2 ( y ) ; y [c;d], то выполняется равенство: Общеупотребительна другая запись повторных интегралов: 2 ( x ) b 2 ( x ) a ( x ) f ( x; y)dy dx a dx ( x ) f ( x; y)dy 1 1 b или Замечание 2. При представлении двойного интеграла в виде повторного, пределы внешнего интеграла всегда постоянные, а пределы внутреннего интеграла, как правило, переменные. Только в случае если область D – прямоугольник и a xb , c y d , то внешний и внутренний интегралы имеют постоянные пределы: b d a c f ( x; y)dxdy dx f ( x; y)dy. D Замечание 3. прямоугольник: Если f ( x; y) f1 ( x) f 2 ( y) a xb, c y d , и область D – то двойной интеграл от f (x;y) по такой области D равен произведению определенных интегралов: f ( x) f 1 D 2 b d a c ( y )dxdy f1 ( x)dx f 2 ( y )dy a x b D : c y d Примеры: 1. Вычислить повторный интеграл: 2 x 2 1 2 x 1 y dx 0 dx 2 xydy 0 x x 2 2 x 2 2 2 1 1 x 2 x 4 4 x x 2 x5 x x dx x dx 2 2 2 2 0 0 1 1 1 3 5 2x x x 2 2 2 x 2 x dx x 2 2 0 0 3 1 3 0 x 1 4 8 0 x 6 12 2 1 1 24 16 3 2 27 18 9 3 1 3 8 12 24 24 24 8 1 dx Ответ: 0 2 x xydy x2 3 8. 2. Расставить пределы интегрирования в одном и другом порядке: f ( x; y)dxdy , D если область D ограничена линиями: y = 2x; y = x; x = 1. 0 1) Чертеж области D: 2) Область D правильная относительно 0y для x [0;1] . Нижняя граница D : y = x; верхняя граница D : y = 2x. Поэтому : 1 2x 0 x f ( x; y)dxdy dx f ( x; y )dy . D 3) Область D правильная относительно 0X, но для y 0;1 левая граница D: x y ; 2 правая граница D: x y , y ; 2 а для y 1; 2 левая граница D: x правая граница D: x 1. Поэтому область D в этом случае разбиваем на две области прямой y=1: D1 ( y 0;1) и D2 ( y 1; 2) , интеграл по D представляем суммой по D1 и D2 : 1 y 2 1 0 y 2 1 y 2 1 2x 1 y 2 1 0 x 0 y 2 1 y 2 f ( x; y)dxdy dy f ( x; y)dx dy f ( x; y)dx D Ответ: f ( x; y)dxdy dx f ( x; y)dy dy f ( x; y)dx dy f ( x; y)dx D 3. Изменить порядок интегрирования: 1 1 x dx 0 1 x f ( x; y )dy . Чертеж области D: 0 x 1 , нижняя граница области D: y 1 x , верхняя – y 1 x. (рис. 6) Чтобы изменить порядок интегрирования, надо внешний интеграл взять по y, а внутренний – по x. Область D относительно 0x правильная, но для y 0;1 левая граница области D: х = 1 – у, правая граница х = 1, а для y 1; 2 левая граница D: х = у – 1, правая – та же х = 1. рис.6 Поэтому область D разбиваем на две области прямой y=1: D1 ( y 0;1) и D2 ( y 1;2) и интеграл по области D представляем в виде суммы интегралов по D1 и D2 : 1 1 x 0 1 x dx f ( x; y )dy f ( x; y )dxdy f ( x; y )dxdy D1 D2 1 1 2 1 0 1 y 1 y 1 dy f ( x; y )dx dy f ( x; y )dx 1 Ответ: 1 x dx 0 1 x 1 1 2 f ( x; y )dy dy f ( x; y )dx dy 0 1 y 1 1 f ( x; y )dx y 1 6. Двойной интеграл в полярной системе координат. Полярная система координат считается заданной, если заданы: 1) точка 0, называемая полюсом; 2) полуось 0X, называемая полярной осью. На 0X выбрана масштабная единица. Тогда положение точки М в этой системе координат определяют две величины: – угол наклона вектора OM к полярной оси 0X и – величина вектора OM . (рис. 7) Если задать декартовую систему координат, связанную с полярной так, чтобы ось 0X совпадала с 0X – полярной и ось 0Y была перпендикулярна к 0X, то можно установить связь между Рис.7 координатами точки М в обеих системах координат: x2 y2 2 x cos y sin или y tg , x где (x;y) – координаты точки М в декартовой системе, ( ; ) - координаты той же точки М в полярной системе. Любую кривую y=f(x), заданную в декартовой системе координат можно задать в полярной системе уравнением = ( ), которое можно получить непосредственно, исходя из геометрических свойств этой кривой, либо с помощью формул перехода от прямоугольных координат к полярным. Элементарной областью D в полярной системе координат считают криволинейный сектор, ограниченный двумя лучами, исходящими из полюса под углами и к оси 0x ( = и = ), и кривой = ( ) (рис.8) рис.8 Определение. Область D в полярной системе координат называется правильной, если любой луч, исходящий из полюса и проходящий через внутреннюю точку области D, пересекает границу области D только в двух точках (рис.9) Рис.9 Замечание 1. Если полюс 0 лежит вне области D, то правильную область D в полярной системе координат можно описать, как область, ограниченную двумя лучами = и = ( < ) и кривыми 1 ( ) и 2 ( ) ( 1 ( ) 2 ( ) ) при ; ) Замечание 2. Если полюс 0 лежит внутри области D, то правильную область D в полярной системе координат можно описать неравенствами: 0 2 ; 0 ( ) . Переход от прямоугольных координат к полярным в двойном интеграле проводится для упрощения его вычисления в случае, если: 1) функция f (x;y) зависит от x 2 y 2 или от y y , т.к. x 2 y 2 2 и tg ; x x 2) если область D ограничена кривыми, уравнения которых легко преобразуются в полярные координаты. Теорема. Пусть выполнены условия: 1. f (x;y) непрерывна в замкнутой области D; 2. Область D является правильной в полярной системе координат, т.е. область D задана неравенствами: , 1 ( ) ≤ ≤ 2 ( ) ; 3. Функции 1 ( ) и 2 ( ) непрерывны при ; . Тогда справедливо равенство: 2 ( ) f ( x; y)dxdy d D 1( f ( cos ; sin ) d ) Следует помнить правило этого перехода: 1. Заменить x cos и y sin в функции f (x;y) и в уравнениях границ области D; 2. Заменить ds d d ; 3. При вычислении двойного интеграла в полярных координатах внешний интеграл вычисляется по от 2 ( ) - если полюс до , а внутренний по от 0 лежит вне области D. Если полюс 0 лежит внутри области D, то внешний интеграл по от 0 до 2 , а внутренний по от 0 до 1 ( ) (граница области D). Пример. Вычислить D 2 2 x y 2x ydxdy , если D: yx Чертеж области D: x 2 y 2 2 x x 2 y 2 2 x 0 ( x 2 2 x 1) y 2 1 ( x 1)2 y 2 1 - круг с центром в точке: (1;0) и радиусом r = 1: В полярной системе уравнение 1) x y 2 x преобразуется: 2 1 ( ) до 2 2 cos 2 2 sin 2 2 cos 2 2 cos 2cos (рис.10) 2) прямая y x 4 ; 4 4 8 8 sin cos3 d 3 3 2 sin cos d 3 2 8 3 4 2 4 3 cos d cos cos 3 2 4 2 4 2 2 2 1 cos 4 cos 4 3 3 2 6 4 2 1 Ответ: 6. 7. Интеграл Эйлера – Пуассона. x e dx 2 Определение. Несобственный интеграл называется 0 интегралом Эйлера – Пуассона. Известно, что не выражается через элементарные функции, поэтому для вычисления интеграла Эйлера – Пуассона используем двойной интеграл от функции e ( x 2 y2 ) по различным специального вида областям. Рассмотрим три области: D1 – 1-ая четверть круга радиуса R; x2+y2 ≤ R2(x ≥ 0; y ≥ 0). D2 – квадрат со стороной R в 1-ой четверти; D3 – 1-ая четверть круга радиуса x=R; y=R; x=0; y=0. R 2 : x2+y2 ≤ 2R2(x ≥ 0; y ≥ 0). ( x По каждой из этих областей вычислим двойной e 2 y2 ) dxdy . D 2 1 2 e 20 1 1 e R2 d (e 1)d 0 20 2 R 2 R2 2 0 R2 1 e 2 e Так как ( x e 2 2 ( x2 y 2 ) y2 ) (1 e ) . 4 > 0 при любых (x; y) D и D1 D2 D3 , то: dxdy < D1 R2 ( x e D2 2 y2 ) dxdy < ( x e 2 y2 ) dxdy D3 Следовательно: 4 2 x2 2 ) < ( e dx ) < (1 e 2 R ) . 4 0 R (1 e Так R2 (1 e R ) , (1 e2 R ) положительные при любых значениях R, то 2 2 2 R 1 e R 2 x e dx < 1 e2 R < 2 0 2 2 Вычислим пределы: lim R 2 2 R 1 e R 2 x2 2 R 2 lim e dx lim 1 e < R < R 2 0 R e x dx < 1 0 < lim R 0 2 0 1 0 2 x По теореме о пределе трех функций: e dx 2 . 0 2 8. Некоторые приложения двойного интеграла. 1) Площадь плоской области D: SD dxdy D 2) Объем цилиндрического тела, ограниченного сверху поверхностью z f ( x; y ) , снизу областью D на плоскости 0XY, сбоку цилиндрической поверхностью, параллельной оси 0Z: V f ( x; y)dxdy . D 3) Площадь поверхности z = f (x;y) : S 1 ( D f 2 f 2 ) ( ) dxdy , x y где D – проекция данной поверхности на 0XY. 4) Масса пластинки, занимающей область D плоскости 0XY и имеющей плотность ( x; y ) : M ( x; y)dxdy . D При этом статистические моменты пластинки, относительно осей 0X и 0Y: M x y ( x; y)dxdy ; M y x ( x; y)dxdy . D D 5) Координаты центра тяжести пластинки: x0 My M ; y0 Mx M . В случае однородной пластинки ( x; y ) Const координаты центра тяжести однородной пластинки: x0 xdxdy D dxdy D , y0 ydxdy D dxdy . D § 2. Тройной интеграл. 1. Определение тройного интеграла. Пусть задана функция u f ( x; y; z ) на замкнутой области D R3. n Определение 1. Сумма f ( x ; y ; z ) V i 1 i i i i , где точка ( xi ; yi ; zi ) Di , Vi - объем i–той части разбиения области D на , Dn , называется D1 , D2 , интегральной суммой функции f ( x; y; z ) в области D. Определение 2. Тройным интегралом от функции u = f (x;y;z)по n области D R называется предел интегральной суммы 3 f ( x ; y ; z ) V i 1 i i i i при условиях: а) n и max Vi 0 (стягиваясь в точку); б) этот предел существует и не зависит ни от способа разбиения области D на части D1 , D2 , где , Dn , ни от выбора точек ( xi ; yi ; zi ) на Di (i 1; n) . dv dxdydz - элемент области D R3. Теорема (достаточное условие существования тройного интеграла) Если функция u f ( x; y; z ) непрерывна в области D R3, то тройной интеграл от этой функции по области D существует. 2. Физический и геометрический смысл тройного интеграла. 1) Если f ( x; y; z ) 1 при ( x; y; z ) D R3, то тройной интеграл от такой функции по области D равен объему тела D: VD dxdydz D 2) Если в каждой точке объемной области D задана плотность распределения масс ( x; y; z ) , то тройной интеграл от этой плотности по области D равен массе тела D: mD ( x; y; z )dxdydz . D 3. Основные свойства тройного интеграла. 1) Пусть u f ( x; y; z ) непрерывна в объемной области D и D D1 D2 , f ( x; y; z )dv f ( x; y; z )dv f ( x; y; z )dv то D D1 D2 2) Если k постоянная величина, то k f ( x; y; z)dv k f ( x; y; z)dv D D 3) Если f1 ( x; y; z ) и f 2 ( x; y; z ) непрерывны в области D R3, то ( f ( x; y; z) f ( x; y; z))dv f ( x; y; z)dv f ( x; y; z)dv. 1 2 1 D 2 D 4) Если для любых ( x; y; z ) D R 3 f1 ( x; y; z ) f 2 ( x; y; z ) , то D выполняется неравенство: f ( x; y; z)dv f ( x; y; z)dv 1 D 2 D 5) Теорема (о среднем значении тройного интеграла) Если функция u f ( x; y; z ) непрерывна в замкнутой области D R3, то внутри области D найдется хотя бы одна точка ( x0 ; y0 ; z0 ) D , для которой выполняется равенство: f ( x; y; z)dv f ( x ; y ; z ) V 0 0 0 D , D где VD – объем тела D. 4. Вычисление тройного интеграла в декартовой системе координат. Для вычисления тройного интеграла от функции u f ( x; y; z ) по области D R3 проецируем область D на плоскость 0XY. Обозначим эту проекцию G(G ПрOXY D) Пусть область D будет такой, что любая прямая, проходящая через внутреннюю точку области D параллельно оси 0Z, пересекает поверхность S, ограничивающую область D, только в двух точках. Пусть z z1 ( x; y ) и z z2 ( x; y) – уравнения поверхностей, ограничивающих область D снизу и сверху соответственно (рис.1). Тогда можно записать: z2 ( x ; y ) f ( x; y; z)dv dxdy D G f ( x; y; z )dz z1 ( x ; y ) Если область G окажется правильной в направлении, например, оси 0Y, т.е. a x b G: , то y1 ( x) y y2 ( x) Рис.1 b y2 ( x ) f ( x; y; z )dv dx D a y1 ( x ) z2 ( x ; y ) dy z1 ( x ; y ) f ( x; y; z )dz. Замечание 1. При сведении тройного интеграла к трем повторным интегралам не обязательно проецировать область D на плоскость 0XY, можно проецировать либо на 0XZ, либо на 0YZ – как удобнее. Замечание 2. Следует сначала вычислять внутренний интеграл по z, считая x и y постоянными, а затем вычислять двойной интеграл от z2 ( x; y ) f ( x; y; z)dz по области G, тогда: полученной функции ( x; y ) z1 ( x ; y ) Пример. Вычислить dxdydz , 3 ( x y z 1) D x y z 1 где D : x 0; y 0 z 0 D: 1) x+ y+ z = 1 – плоскость, пересекает оси координат в точках (1;0;0), (0;1;0) и (0;0;1). 2) x = 0 – плоскость 0ZY, y = 0 – плоскость 0XZ, z = 0 – плоскость 0XY. рис.2 Итак: D – треугольная пирамида с основанием AOB и вершиной в точке C. Пр OXY D G – треугольник AOB. 1 x y dxdydz dxdy 3 ( x y z 1) D G 1 x y dxdy G 0 d ( z x y 1) 3 ( x y z 1) 0 dz 3 ( x y z 1) 1 dxdy ( G 2( x y z 1)2 1 x y 0 ) ( G 1 1 )dxdy 2( x y 1 x y 1)2 2( x y 1) 2 1 1 x 1 1 x 1 1 1 1 ( ) dxdy dx ( )dy 2 2 2( x y 1) 8 2( x y 1) 8 G 0 0 G: 1 ( 2 0 0 dy x y 1 1 x 0 dy )dx 8 рис.3. 1 1 ( 2 0 1 x 0 d ( y x 1) y ( y x 1) 2 8 1 x 0 1 x 1 1 1 x )dx ( )dx 0 2 y x 1 8 0 1 1 1 1 1 1 1 x ( )dx 2 1 x x 1 2 x 1 8 8 0 1 1 1 1 1 1 x 1 1 3 x ( )dx ( )dx 4 2 x 1 8 8 2 x 1 8 8 0 0 1 1 3 1 x2 ln x 1 x 0 2 8 0 16 Ответ: 1 0 1 1 3 1 1 5 ln 2 ln1 ln 2 ; 2 2 8 16 2 16 1 5 ln 2 . 2 16 5. Вычисление тройного интеграла в цилиндрических координатах. Переход от декартовых координат к цилиндрическим проводится по формулам: x cos ; y sin ; z z . (рис.4) ( 0 ; 0 2 ; z ) Тогда тройной интеграл от f ( x; y; z ) по области преобразуется следующим образом: рис.4 f ( x; y; z)dxdydz f ( cos ; sin ; z) d d dz. D D 6. Вычисление тройного интеграла в сферических координатах. Переход от декартовых координат к сферическим проводится по формулам: x cos sin ; y sin sin ; z cos (рис.5) ( 0 ; 0 2 ; 0 ) Тогда тройной интеграл от f ( x; y; z ) по области D R3преобразуется следующим образом: z рис.5 f ( x; y; z)dxdydz D f ( cos sin ; sin sin ; cos ) 2 sin d d d . D 7. Некоторые приложения тройного интеграла. 1) Объем тела, занимающего область D R3: VD dxdydz D 2) Если плотность тела ( x; y; z ) , то масса тела, занимающего область D R3: M D ( x; y; z )dxdydz D 3) Координаты центра тяжести тела, занимающего область D R3: Если тело однородное, т.е. ( x; y; z ) = Const, то координаты его центра тяжести: § 2. Криволинейные интегралы. 1. Криволинейный интегралы I рода (по длине дуги). Пусть функция z = f (x; y) определена и непрерывна в точках дуги AB гладкой кривой l, имеющей уравнение y ( x), (a x b) . Разобьем дугу произвольным AB образом на n дуг точками A A0 ; A1 ,... An B, пусть l i – длина дуги Ai 1 Ai . На каждой из n дуг выберем произвольно точку M i ( xi ; yi )(i 1; n) и умножим значение функции f ( xi ; yi ) в этой точке на длину l i . Определение 1. Интегральной суммой для функции f (x; y) по дуге AB n называется сумма вида: f ( x ; y )l i i 1 i i Определение 2. Криволинейным интегралом от функции f (x; y) по дуге AB (или криволинейным интегралом I рода) называется предел n интегральной суммы f ( x ; y )l i 1 1) n и max li 0 i i i при условиях: i 1; n 2) этот предел существует и не зависит ни от способа разбиения дуги AB на части, ни от выбора на каждой из частей точек M i ( xi ; yi ) . f ( x; y)dl AB n lim f ( x ; y )l n max li 0 i 1 i i i Криволинейный интеграл I рода вычисляется по формуле: AB b f ( x; y )dl f ( x; ( x)) 1 ( ( x)) 2 dx, a если кривая AB задана функцией y ( x), (a x b) . Если кривая AB задана параметрически: x = x(t), y = y(t), где t1 t t2 , то криволинейный интеграл I рода от функции f (x; y) по такой кривой вычисляется по формуле: t2 AB f ( x; y )dl f ( x(t ); y (t )) ( x(t )) 2 ( y(t )) 2 dt. t1 Аналогично определяется и вычисляется криволинейный интеграл от функции u f ( x; y; z ) , определенной и непрерывной в точках дуги AB гладкой пространственной кривой l. Пусть эта кривая задана параметрическими уравнениями: x = x(t), y = y(t), z = z(t)( t1 t t2 ), тогда AB t2 f ( x; y; z )dl f ( x(t ); y (t ); z (t )) ( x(t )) 2 ( y(t )) 2 ( z (t )) 2 dt. t1 Если f (x; y)>0, то криволинейный интеграл I рода представляет собой массу кривой l, имеющей переменную плотность f ( x; y ) . Основные свойства криволинейного интеграла I рода. 1) Криволинейный интеграл I рода не зависит от направления пути интегрирования: f ( x; y)dl f ( x; y)dl AB BA 2) Если дугу l интегрирования разбить на две части l1 и l2 , то: f ( x; y)dl f ( x; y)dl f ( x; y )dl. l 3) l1 l2 ( f ( x; y) f ( x; y))dl f ( x; y)dl f ( x; y)dl. 1 2 1 l 4) l 2 l k f ( x; y)dl k f ( x; y)dl , l l где k=const. 5) Если f ( x; y ) 1 для любой точки кривой AB, то dl AB – длина AB кривой AB. Примеры. 1) Вычислить длину кривой y 2 x3 от точки A (0;0) до точки B(4;8). 3 12 3 x ( y x ; y x ) 2 2 3 8 8 ( 103 1) (10 10 1). 27 27 Ответ: AB 8 (10 10 1) 27 2) вычислить ( x y)dl , если AB – отрезок прямой от точки A (0;0) до AB точки B(4;3). Прямая AB: y = kx, при x = 4 и y = 3: 3=4k k 3 3 y x ; т.е. AB: 4 4 4 4 3 3 1 25 AB ( x y)dl 0 ( x 4x) 1 ( 4 )2 dx 0 4x 16 dx 4 5 5 x2 xdx 16 0 16 2 4 0 5 . 2 5 . Ответ: 2 2. Криволинейный интеграл II рода (по координатам) Пусть в пространстве R3 задана дуга AB гладкой кривой l и на этой дуге AB задано векторное поле F ( x; y; z ) P( x; y; z )i Q( x; y; z ) j R( x; y; z )k . Точками A A0 ; A1 , A2 ,... An B дуга AB разбита на n произвольных дуг A0 A1 , A1 A2 ,... An1 An , на каждой из которых произвольно взяты точки M i ( xi ; yi ; zi )(i 1; n) . Концы дуг соединены отрезками прямых, на которых выбрано направление, т.е. l1 A0 A1; l 2 A1 A2 ,...ln An1 An . координаты: li (xi ; yi ; zi ), образованы каждый из векторы: которых имеет i 1; n Составим сумму скалярных произведений векторов F (M i ) li (i 1; n) n n F (M ) l P(M ) x Q(M ) y R(M ) z i 1 i i i 1 i i i i i i n Определение 3. Сумма F (M ) l i 1 i i называется интегральной суммой 3 для векторной функции F ( x; y; z ) по дуге AB кривой l R . Определение 4. Криволинейным интегралом II рода от векторной функции F ( x; y; z ) по дуге AB кривой l R3 называется предел n последовательности интегральных сумм 1) F (M ) l i 1 i i при условиях: n и max li 0 (i 1; n) ; 2) этот предел существует и не зависит ни от способа разбиения дуги на части, ни от выбора на каждой из этих частей точек M i . Этот криволинейный интеграл II рода обозначается: то есть: F dl P( x; y; z)dx Q( x; y; z)dy R( x; y; z)dz AB AB Теорема 1 (существование криволинейного интеграла II рода). Если вектор-функция F ( x; y; z ) непрерывна на дуге AB гладкой кривой l , то криволинейный интеграл II рода существует. Замечание 1. Если вектор-функция F ( x; y ) P( x; y )i Q( x; y ) j задана на дуге 2 AB гладкой кривой l R , то криволинейный интеграл II рода записывается следующим образом: F dl P( x; y)dx Q( x; y)dz AB AB Свойства криволинейного интеграла II рода. 1) Интеграл II рода изменяет знак на противоположный при изменении направления пути интегрирования: F d l F dl . AB 2) BA Pdx Qdy Rdz Pdx Qdy Rdz. AB AB AB AB Остальные свойства аналогичные свойствам интеграла I рода. Физический смысл криволинейного интеграла II рода. Интеграл F dl равен работе, совершаемой при перемещении AB материальной точки единичной массы из точки A в точку B по кривой l в силовом поле, создаваемом вектором F P( x; y; z )i Q( x; y; z ) j R( x; y; z )k . Вычисление криволинейного интеграла II рода. 3 Пусть дуга AB кривой l R задается параметрически: x = x(t), y = y(t), z = z(t) и точке A соответствует значение параметра t , а точке B – значение t . Тогда: P( x; y; z)dx Q( x; y; z)dy R( x; y; z)dz ( P( x(t ); y(t ); z(t )) x(t ) AB Q( x(t ); y(t ); z (t )) y (t ) R( x(t ); y (t ); z (t )) z (t )) dt. В частном случае плоского задания кривой l R 2 , например, в виде функции y (x ) от точки A( a; ( a )) до точки B(b; (b)) , интеграл II рода вычисляется по формуле: b P( x; y)dx Q( x; y)dy ( P( x; ( x)) Q( x; ( x)) ( x))dx. AB a Примеры: Вычислить: ( x y)dx ( x z)dy ydz 1) AB AB : x cos t; y sin t; z a t;0 t 2 2 ((cos t sin t ) ( sin t ) (cos t at ) cos t sin t a)dt 0 2 ( cos t sin t sin 2 t cos 2 t at cos t a sin t )dt 0 cos 2 t 2 2 0 2 2 2 0 0 0 cos 2tdt a t cos t dt a sin t dt cos 2 2 cos 2 0 1 sin 2t 2 2 2 2 0 a(t sin t cos t ) 2 0 a cos t 2 0 1 1 1 1 sin 4 sin 0 a(2 sin 2 0 cos 2 cos 0) a(cos 2 cos 0) 0. 2 2 2 2 1 ye dx xdy ( x 2 e x 2x 2 )dx 3 xy 2) AB 0 AB : y x 2 ; A(0;0); B(1;1) 1 1 1 x3 1 x3 1 2 3 1 1 1 2 1 3 2 e d ( x ) 2 x dx e x e 0 (e 1). 30 3 3 0 3 3 3 3 0 0 3) Вычислить работу силового поля F yi xj при перемещении x y a b 2 материальной точки вдоль верхней половины эллипса 2 2 2 A (a;0) в точку B (-a;0). A F dl ydx xdy AB AB 1 из точки x2 y2 x a cos t 2 2 1 b y b sin t ,0 t a (b sin t (a sin t ) a cos t b cos t )dt 0 0 0 ab(sin t cos t )dt ab dt ab t ab. 2 2 0 Замечание 2. Если кривая l , по которой проводится интегрирование, является замкнутой, то A= B (начало пути совпадает с его концом). Тогда путь интегрирования называют контуром и обозначают буквой C. При этом криволинейный интеграл обозначают: Pdx Qdy Rdz C с указанной стрелкой направления интегрирования. В таком случае интеграл называют циркуляцией вектора F по замкнутому контуру. Если стрелки нет, то вычисляют интеграл против часовой стрелки (положительное направление). 3. Формула Грина. Теорема. Пусть C – граница замкнутой области DCR 2 и функции P (x;y), Q (x;y), P Q ( x; y ) и ( x; y ) непрерывны в области D. Тогда справедлива x y формула Грина: Pdx Qdy ( C D Q P ) dxdy , x y где обход контура C осуществляется против часовой стрелки. Доказательство: Считаем область D правильной в направлениях 0X и 0Y (рис.1). рис.1 Пусть кривая AMB – график функции y y1 ( x) – дуга AMB, кривая ANB – график функции y y 2 ( x) – дуга ANB, кривая MAN - график функции x x1 ( y) – дуга MAN, кривая MBN - график функции x x2 ( y) – дуга MBN 2 y2 ( x ) P P Вычислим y dxdy dx y dy dx( P( x; y )) y ( x ) 1 D a y1 ( x ) a b y ( x) b b b b a a a dx( P( x; y2 ( x)) P( x; y1 ( x))) P( x; y2 ( x))dx P( x; y1 ( x))dx P( x; y )d x BNA P( x; y)dx P( x; y )dx, AMB C Аналогично вычислим x ( y) 2 x2 ( y ) Q Q D x dxdy m dy x ( y ) x dx m dy Q( x; y) x1 ( y ) 1 n n n (Q( x2 ( y ); y )) Q( x1 ( y ); y ))dy m n n m m Q( x2 ( y ); y )dy Q( x1 ( y ); y )dy Вычитаем (1) из (2), получим: Используя свойства двойного и криволинейного интегралов, можно записать: Теорема доказана. Замечание 1) Условия теоремы Грина обеспечивают существование всех входящих в нее интегралов. 2) Если область D не является правильной, то ее надо разбить на правильные части. Тогда: и для каждого из n слагаемых применяем формулу Грина. Пример. Вычислить по формуле Грина: P( x; y ) y Py 1 Q( x; y ) x Qx 1 Из полученного результата можно записать формулу для вычисления площади области D, у которой границей является контур C, с помощью криволинейного интеграла: (e x cos y e x cos y m)dxdy mdxdy m dxdy m S D D D a ma m R 2 m ( ) 2 . 2 4 2 Ответ: ma 2 4 . D 4. Независимость криволинейного интеграла от пути интегрирования. (плоский случай) Определение. Криволинейный интеграл II рода называется независящим от пути интегрирования, если результат интегрирования будет один и тот же по любому пути, соединяющему точки A и B, на котором функции P (x;y) и Q (x;y) непрерывны. Обозначение такого интеграла: B P( x; y)dx Q( x; y)dy . A B Теорема 1. Криволинейный интеграл P( x; y)dx Q( x; y)dy не A зависит от пути интегрирования в области D тогда и только тогда, когда: по любому замкнутому контуру C, целиком лежащему в области D. Доказательство: 1) Необходимость. Пусть A и B D . Рассмотрим две произвольные кривые l1 и l 2 , соединяющие точки A и B. Отсюда следует: Pdx Qdy Pdx Qdy 0 AmB AnB Так как кривые l1 и l 2 взяты произвольно, то и контур C=AmBnA – произвольный. Необходимость доказана. Достаточность. Возьмем произвольный контур C D и на нем две точки A и B (произвольно). (рис. 2) Тогда по свойству криволинейного интеграла можно записать: Поэтому AmBl1 Pdx Qdy Pdx Qdy AnBl2 То есть результат интегрирования по двум произвольным кривым, имеющих одно и тоже начало (A) и один и тот же конец (B) одинаковый, B следовательно Pdx Qdy не зависит от пути интегрирования. A Достаточность доказана. Теорема 2. (Критерий независимости криволинейного интеграла от пути интегрирования) Пусть функции P( x; y ), Q( x; y ), P Q ( x; y ), ( x; y ) y x односвязной области D R2. Чтобы интеграл непрерывны в P( x; y)dx Q( x; y)dy не AB зависел от пути интегрирования в области D, необходимо и достаточно выполнения равенства: P Q ( x; y) ( x; y ) в любой точке ( x; y ) D . y x Доказательство. 1) Необходимость: Доказать: P Q ( x; y) ( x; y ) в любой точке ( x; y ) D . y x Предположим, что в точке M 0 D не выполняется равенство, т.е. P Q (M 0 ) (M 0 ) y x Q P (M 0 ) ( M 0 ) 2 0. Построим окружность (C) с центром в x y точке M 0 столь малого радиуса , чтобы во всех точках круга S, Пусть ограниченного этой окружностью, выполнялось неравенство Q P . x y Это требование можно выполнить, исходя из непрерывности функции Q P . Тогда по формуле Грина: x y То есть есть замкнутый контур, принадлежащий области D, по которому интеграл не равен 0. Это противоречит условию теоремы. Следовательно, в любой точке ( x; y ) D выполняется равенство: P Q ( x; y ) ( x; y ). y x Что и требовалось доказать. 2) Достаточность: Рассмотрим любой контур C D , ограничивающий область S D (т.к. область D односвязная). Тогда по формуле Грина: Так как по условию теоремы Q P ( x; y ) ( x; y ) в любой точке ( x; y ) D , то x y Q P 0 в области S D . Следовательно, x y 0dxdy 0 S Так как контур C произвольный в области D, то Pdx Qdy в области D AB не зависит от пути интегрирования. Достаточность доказана. 5. Потенциальное поле, потенциальная функция и ее вычисление. Определение 6. потенциальным, Векторное поле F ( x; y ) P( x; y )i Q( x; y ) j называется если P( x; y)dx Q( x; y)dy не зависит от пути, AB соединяющему точки A и B. Если P( x; y)dx Q( x; y)dy не зависит от пути интегрирования, то AB Pdx Qdy 0 Pdx Qdy dU ( x; y) C При этом функция U ( x; y ) называется потенциальной функцией поля F P( x; y )i Q( x; y ) j . Вычисление потенциальной функции. Если P Q ( x; y ) ( x; y ) , то существует функция U ( x; y ) , для которой y x dU Pdx Qdy . криволинейный Для интеграл вычисления функции Pdx Qdy, не U ( x; y ) зависящий используем от пути AB интегрирования. Путь AB выбираем любой, соединяющий точки A( x0 ; y 0 ) и B ( x; y ) ; например, ломаную линию ACB, где C ( x; y0 ) (рис. 3). Тогда: x y x0 y0 Итак, U ( x; y ) P( x; y 0 )dx Q( x; y )dy. Пример. Найти потенциальную функцию U ( x; y ) по ее полному y дифференциалу: dU ( x y 1)dx (e x)dy Проверим условие полного дифференциала: P ( x y 1) Py 1 Py Q x – выполняется Q e y x Q x 1 y Способ 1. Если dU ( x y 1)dx (e x)dy , то U x2 x x y 1 U ( x y 1)dx ( y ) 2 yx x ( y )( y const ), U e y x y U x2 yx x ( y ). 2 U x ( y ) e y x ( y ) e y ( y ) e y dy e y C. y x2 yx x e y C Следовательно, U 2 Способ 2. выберем в качестве пути интегрирования ломаную OCB, где O(0;0), C ( x;0), B ( x; y ) (рис. 4) B ( x; y ) U ( x; y ) ( x y 1)dx (e y x)dy O (0;0) ( x y 1)dx (e y x)dy OC y ( x y 1) dx ( e x)dy CB y x x2 x2 y x e xy x e y xy 1; 2 2 0 0 Итак: U x2 x e y xy C 2 C – произвольная постоянная. 6. Вычисление криволинейного интеграла, независящего от пути интегрирования. Интеграл Pdx Qdy не зависит от пути интегрирования, если Py Q x . AB Тогда значение интеграла будет зависеть от координат начала пути – точка A и конца пути – точка B. При этом интеграл записывают ( x2 ; y 2 ) следующим образом: Pdx Qdy. ( x1 ; y1 ) Чтобы его вычислить, можно использовать два способа. ( x1 ; y1 ) ( x1 ; y1 ) u u ( x; y ) – потенциальная функция. Но так как ( x2 ; y2 ) то ( x2 ; y2 ) Pdx Qdy du , Способ 1. где ( x2 ; y2 ) b b a a du u u (b) u (a) , du u ( x; y ) ( x1 ; y1 ) ( x2 ; y2 ) Следовательно: ( x2 ; y2 ) ( x1 ; y1 ) u ( x2 ; y2 ) u ( x1; y1 ). Pdx Qdy u ( x2 ; y2 ) u ( x1 ; y1 ). ( x1 ; y1 ) Способ 2. Можно вычислить интеграл, выбрав путь интегрирования (любой), соединяющий точки A( x1 ; y1 ) и B( x2 ; y2 ) . Наиболее рационально выбрать путь ACB – ломаную линию, составляющие которой параллельны осям координат, т.е. взять точку C ( x2 ; y1 ) или C( x1 ; y2 ) , тогда путь интегрирования будет состоять из двух отрезков: AC и CB, при этом интеграл будет равен сумме двух интегралов по AC и CB. Пример. Вычислить интеграл: ( 2; 2 ) ( x 2 y)dx (2 x y)dy ( 0; 0 ) 2 2 x2 xdx (4 y)dy 2 0 0 y2 4y 2 0 0 2 2 2 2 8 2 8. 0 ( 2; 2 ) 2 способ. ( 2; 2 ) ( x 2 y )dx (2 x y )dy ( 0; 0 ) du u ( x; y ) ( 0; 0 ) ( 2; 2 ) ( 0; 0 ) , где u ( x; y ) : du ( x 2 y )dx (2 x y )dy. x2 u ( x 2 y )dx ( y ) 2 yx ( y )( y const ), u x x 2 y 2 u 2 x y y2 y u y 2 x ( y ) 2 x y ( y ) y ( y ) 2 ( 2; 2 ) x2 y2 2 yx ; ( x 2 y )dx (2 x y )dy Значит: u ( x; y ) 2 2 ( 0; 0 ) x2 y 2 ( 2; 2 ) ( 2 yx ) 2 8 2 8. 2 2 ( 0; 0 ) Ответ: 8. § 4. Поверхностные интегралы. 1. Поверхностный интеграл I рода. Пусть функция U U ( x; y; z ) непрерывна на гладкой поверхности S, заданной функцией z f ( x; y ) непрерывно дифференцируемой в каждой точке области D R2. Поверхностным интегралом I рода от функции U ( x; y; z ) по поверхности S называется предел интегральной суммы n U ( x ; y ; z ) S i 1 i i i i при условиях: 1) n и max S i 0 (стягиваясь в точку), 2) этот предел существует и не зависит ни от способа разбиения поверхности S на n частей, ни от выбора точек ( xi ; yi ; z i ) на этих частях, где S i – площадь i-той части поверхности S (i 1; n), dS – дифференциал z 2 z 2 dS 1 ( ) ( ) dxdy. поверхности S, вычисляемый по формуле: x y Если проекция поверхности S на плоскость OXY однозначна и совпадает с областью D, то поверхностный интеграл I рода вычисляется по формуле: U ( x; y; z)ds U ( x; y; f ( x; y)) 1 ( S D z 2 z 2 ) ( ) dxdy. x y Замечание 1. Если прямая, параллельная оси OZ и проходящая через внутреннюю точку области D, пересекает поверхность S в более чем одной точке, то поверхность S разбивается на части так, чтобы прямая параллельная OZ пересекала S только в одной точке. И интегрирование следует выполнить по каждой из полученных частей. Замечание 2. Поверхностный интеграл I рода не зависит от того, по какой стороне поверхности он берется. Замечание 3. Физический смысл поверхностного интеграла I рода зависит от физического смысла данного скалярного поля, т.е. от U U ( x; y; z ) : он может определять массу, распределенную на данной поверхности, электрический заряд и т.д. Замечание 4. Если функция U U ( x; y; z ) равна во всех точках поверхности S единице, то поверхностный интеграл I рода ds равен S площади поверхности S. Следовательно, справедлива формула: S S ds 1 ( S D z 2 z 2 ) ( ) dxdy, где D – проекция поверхности S x y на OXY, z f ( x; y ) – функция, задающая поверхность S. 2. Поверхностный интеграл II рода. Гладкая поверхность S R 3 называется двусторонней, если нормаль к этой поверхности в любой ее точке при обходе по любому замкнутому контуру, лежащему на поверхности S и не имеющему общих точек с ее границей, возвращается в первоначальное положение. Выбор определенной стороны поверхности, т.е. выбор направления нормали к поверхности, называется ориентацией поверхности. Пусть S - гладкая ориентированная поверхность и в каждой точке этой поверхности задана непрерывная функция U U ( x; y; z ) . Разобьем поверхность S на n частей произвольно и каждую часть проецируем на плоскость, например, OXY. Обозначим площадь каждой проекции S ixy (i 1; n) . На каждой из частей поверхности произвольно берем точку n M i ( xi ; yi ; z i ) и составим сумму: U ( x ; y ; z ) S i 1 i i i ixy . Поверхностным интегралом II рода называется предел интегральной n суммы U ( x ; y ; z ) S i 1 i i i ixy при условиях: 1) n и max Si 0 (стягиваясь в точку), 2) этот предел существует и не зависит ни от способа разбиения поверхности S на части, ни от выбора точек M i (i 1; n) на каждой из частей поверхности, т.е.: Аналогично можно дать определения поверхностных интегралов IIрода по другим координатам: Пусть в каждой точке ориентированной поверхности S определен вектор: F ( x; y; z ) P( x; y; z ) i Q( x; y; z ) j R( x; y; z ) k , где функции P ( x; y; z ) , Q ( x; y; z ) , R ( x; y; z ) - непрерывные функции на поверхности S. Тогда можно определить поверхностный интеграл II рода в F общем случае от векторной функции ( x; y; z ) по поверхности S : F ( x; y; z) ds P( x; y; z)dydz Q( x; y; z)dxdz R( x; y; z)dxdy, S S F ( x ; y ; z ) d s F где - скалярное произведение вектора ( x; y; z ) и ds - вектора с координатами: ds (dS yz ; dS xz ; dS xy ) (cos ds; cos ds; cos ds) (dydz; dxdz; dxdy). Следовательно, поверхностный интеграл II рода в общем случае можно записать: F ds ( P( x; y; z) cos Q( x; y; z) cos R( x; y; z) cos )ds S S P( x; y; z )dydz Q( x; y; z )dxdz R( x; y; z )dxdy. S То есть в общем случае интеграл можно записать как поверхностный интеграл I рода или как поверхностный интеграл II рода – по координатам. Поверхностный интеграл II рода называют потоком векторного поля F ( x; y; z ) через поверхность S или S . Название «поток» связано с гидромеханической задачей – вычисление количества жидкости или газа, протекающего за единицу времени в заданном направлении через поверхность S. Переход к другой стороне поверхности меняет направление нормали к поверхности, а потому и знак поверхностного интеграла II рода. Вычисление поверхностного интеграла II рода сводится к вычислению поверхностного интеграла I рода: F d s ( F n) ds S S P( x; y; f ( x; y)) cos Q( x; y; f ( x; y)) cos R( x; y; f ( x; y)) cos )ds, S где cos ; cos ; cos - направляющие косинусы вектора нормали n ; z f ( x; y ) - функция, задающая поверхность S. Или вычисление поверхностного интеграла II рода сводится к вычислению суммы трех двойных интегралов: где ПрyzS, ПрxzS, ПрxyS - проекции поверхности S на OYZ, OXZ и OXY соответственно, функции x (y;z), y (x;z) и z (x;y) – выражения, полученные из уравнения z f ( x; y ) , задающего поверхность S, с помощью разрешения x, y и z относительно соответствующих координат. F x i y j z k Пример. Вычислить поток вектора через внешнюю 1 сторону сферы, лежащей в первом октанте (рис. ): 8 x 2 y 2 z 2 R 2 x 0; y 0; z 0 Так как в первом октанте внешняя нормаль сферы со всеми осями координат образует острые углы, то все три направляющих косинуса нормали неотрицательны. Поэтому: Вычислим первый интеграл, остальные будут по величине такие же. R 3 R 3 Итак: F ds 3 6 2 . S R 3 F ds . Ответ: 2 S 3. Дивергенция векторного поля. Теорема Гаусса – Остроградского. Определение. Пусть в пространстве R 3 задан вектор F ( x; y; z ) P( x; y; z ) i Q( x; y; z ) j R( x; y; z ) k , P, Q где функции и R дифференцируемые в некоторой области D R3. Тогда F дивергенцией векторного поля ( x; y; z ) называется скалярная величина, обозначаемая divF и вычисляемая по формуле: P Q R divF . x y z Теорема Гаусса – Остроградского. Пусть задана замкнутая поверхность S , ограниченная двумя правильными по направлению оси OZ поверхностями: S1 : z z1 ( x; y) и S2 : z z2 ( x; y) . Тогда поток вектора F ( x; y; z ) P( x; y; z ) i Q( x; y; z ) j R( x; y; z ) k через поверхность S с нормалью n cos i cos j cos k , направленной из поверхности S (наружу по отношению к объему V , ограниченному поверхностью S), вычисляется по формуле: ( P( x; y; z) cos Q( x; y; z) cos R( x; y; z) cos )ds S ( V P Q R )dxdydz x y z Эту формулу можно записать в векторной форме: F dS divF dV S . V Формула Гаусса – Остроградского связывает поток вектора F через замкнутую поверхность S, ориентируемую вектором нормали n , направленный наружу по отношению к объему V, заключенному внутри поверхности S, с тройным интегралом по объему V от divF . Если вектор F является вектором скорости жидкости, протекающей через объем V, то интеграл дает количество жидкости, вытекающей из объема V через поверхность S в единицу времени. Если жидкость втекает в объем V, то тройной интеграл получается отрицательным, т.к. divF <0. div F Если =0 во всех точках объема V, то поток вектора равен 0. Это означает, что количество втекающей жидкости и вытекающей из объема V одинаковое. Пример. Определить поток вектора F x i y j z k через внешнюю 2 2 2 сторону сферы x y z 4 . P Q R 1; 1; 1. Найдем divF ; P x, Q y, R z x y z Следовательно: divF 1 1 1 3. 4. Ротор (вихрь) векторного поля. Теорема Стокса. Определение. Ротором (или вихрем) векторного поля F ( x; y; z ) P( x; y; z ) i Q( x; y; z ) j R( x; y; z ) k называется вектор, который в каждой точке дифференцируемости поля обозначается rotF и вычисляется следующим образом: Теорема Стокса. Пусть в пространстве R 3 задан замкнутый гладкий контур C, являющийся границей поверхности S, заданной непрерывно дифференцируемой функцией. Ориентация поверхности S согласуется с направлением обхода контура C «по правилу винта»: вектор нормали в каждой точке поверхности S направлен так, что если смотреть с конца вектора, то обход контура C наблюдается против часовой стрелки (в этом случае направление вектора нормали считается положительным). Тогда справедлива формула: Pdx Qdy Rdz C (( S R Q P R Q P ) cos ( ) cos ( ) cos )dS y z z x x y Эта формула устанавливает связь между криволинейным интегралом II рода по замкнутому контуру (т.е. циркуляцией вектора F ( x; y; z ) ) с поверхностным интегралом II рода от векторного поля rotF по поверхности S, ориентированной с обходом контура C «по правилу винта» (т.е. с потоком вектора rotF по поверхности, натянутой на контур C). В векторной форме формула Стокса имеет вид: F d l rot F n dS C S Замечание 1. Если рассматривать формулу Стокса в плоском случае (т.е. если z=0), то получается формула Грина. Значит формула Грина является частным случаем формулы Стокса. Замечание 2. Из теоремы Стокса следует, что потоки rotF через любые две поверхности, имеющие общий «край», равны. Пример. 2 3 x y dx dy zdz , Применяя формулу Стокса, вычислить C x 2 y 2 r 2 если контур C: (окружность на плоскости OXY) z 0 Найдем x Итак: 2 2 2 y 3 dx dy zdz 3x y dxdy S C 2 3x 2 y 2 dxdy S OXY 2 r r 3 d cos sin d 3 cos sin d 5 d 2 0 2 2 2 2 0 0 2 1 6 2 3 sin 2 d 4 0 6 r 0 r6 r6 (2 0) . 16 8 Ответ: r6 8 . 3 r6 6 8 2 2 0 2 r6 1 ( 1 cos 4 ) d ( sin 4 ) 0 16 4 0