Псевдошумовые системы измерения дальности CCSDS 414.0-G-0
advertisement

Космические информационные системы
Сообщение о стандартах
ПСЕВДОШУМОВЫЕ (PN)
СИСТЕМЫ ИЗМЕРЕНИЯ
ДАЛЬНОСТИ
ПРОЕКТ ИНФОРМАЦИОННОГО СООБЩЕНИЯ
CCSDS 414.0-G-0
ПРОЕКТ ЗЕЛЕНОЙ КНИГИ
январь 2010г.
Космические информационные системы
Сообщение о стандартах
ПСЕВДОШУМОВЫЕ (PN)
СИСТЕМЫ ИЗМЕРЕНИЯ
ДАЛЬНОСТИ
ПРОЕКТ ИНФОРМАЦИОННОГО СООБЩЕНИЯ
CCSDS 414.0-G-0
ПРОЕКТ ЗЕЛЕНОЙ КНИГИ
Январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
ОТ ИЗДАТЕЛЬСТВА
Издание:
Проект Зеленой книги, Издание предвыпускное
Дата:
Январь 2010
Место:
Нордвейк, Нидерланды
(КОГДА ЭТО ИНФОРМАЦИОННОЕ СООБЩЕНИЕ БУДЕТ ЗАВЕРШЕНО, ОНО
БУДУТ СОДЕРЖАТЬ СЛЕДУЮЩЕЕ АВТОРСКОЕ УТВЕРЖДЕНИЕ)
Настоящий документ допущен к публикации Советом Управления Консультативного
Комитета по Космическим Информационным Системам (CCSDS) и представляет собой
техническое соглашение, принятое единогласно Агентствами - членами CCSDS.
Процедура рассмотрения и утверждения документов CCSDS подробно изложена в
Руководстве по процедурам Консультативного Комитета по Космическим
Информационным Системам
Настоящий документ издан и поддерживается:
Секретариатом CCSDS
Отделом космических коммуникаций и навигации, 7L70
Директората по управлению космическими полетами
Штаб-квартиры NASA
Вашингтон, DC 20546-0001, США
CCSDS 000.0-G-0
Стр. 1-0
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
ПРЕДИСЛОВИЕ
[На этом месте будет помещен текст предисловия, написанный специально для этого
документа. Ниже приведён стандартный текст.]
Ожидается, что в процессе дальнейшего развития может происходить дополнение, изменение или
изъятие данного документа. В связи с этим, настоящее Сообщение является объектом
документооборота CCSDS и подчиняется процедуре контроля изменений, определенных
Руководством по Процедурам Консультативного комитета по космическим информационным
системам.
Находящиеся в обращении версии документов CCSDS можно найти на Вебсайте CCSDS:
http://www.ccsds.org/
Вопросы, касающиеся содержания или статуса настоящего документа необходимо
направлять в Секретариат CCSDS по адресу, приведенному на странице 1-1. (раздел «от
издательства»)
CCSDS 000.0-G-0
Стр. 1-1
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
На момент публикации действующими членами CCSDS и агентствами–наблюдателями
являлись:
Агентства члены CCSDS
Итальянское космическое Агентство Agenzia Spaziale Italiana (ASI)/Италия.
Британский национальный космический центр British National Space Centre
(BNSC)/Соединенное королевство.
Космическое Агентство Канады Canadian Space Agency (CSA)/Канада.
Национальный Центр космических исследований Centre National d. Etudes Spatiales
(CNES)/Франция.
Китайская национальная Администрация по космосу China National Space
Administration (CNSA)/Китайская народная республика
Германский аэрокосмический центр Deutsches Zentrum für Luft- und Raumfahrt e.V.
(DLR)/Германия.
Европейское космическое Агентство European Space Agency (ESA)/Европа.
Национальный институт космического развития Nacional Instituto de Pesquisas
Espaciais (INPE)/Бразилия.
Национальная Администрация по аэронавтике и исследованию космоса National
Aeronautics and Space Administration (NASA)/США.
Национальное Агентство Японии по развитию космоса National Space Development
Agency of Japan (NASDA)/Япония.
Российское Космическое Агентство Russian Space Agency (RSA)/Российская
Федерация
Агентства-наблюдатели
Австрийское космическое агентство Austrian Space Agency (ASA)/Австрия.
Бельгийская Федеральная Служба научной стратегии Belgian Federal Science Policy
Office (BFSPO)/Бельгия
Центральный научно-исследовательский институт машиностроения (ЦНИИмаш)
Central Research Institute of Machine Building (TsNIIMash)/ Российская Федерация.
Центр аэрокосмической техники Centro Tecnico Aeroespacial (CTA)/Бразилия.
Китайская академия наук Chinese Academy of Sciences (CAS)/ Китай.
Китайская академия космических технологий Chinese Academy of Space
Technology (CAST)/Китай.
Объединенная научно-производственная исследовательская организация
Commonwealth Scientific and Industrial Research Organization (CSIRO)/Австралия.
Центр применения искусственных спутников Земли CSIR Satellite Applications
Centre (CSIR)/Республика Южная Африка
Датский Национальный Космический Центр Danish National Space Center
(DNSC)/Дания.
Европейская организация по использованию метеорологических спутников
European Organization for the Exploitation of Meteorological Satellites
(EUMETSAT)/Europe.
Европейская организация спутниковой связи European Telecommunications Satellite
Organization (EUTELSAT)/Европа.
Агентство по Развитию Гео - информатики и Космических Технологий GeoInformatics and Space Technology Development Agency (GISTDA)/Таиланд.
CCSDS 414.1-B-1
Стр. 1-3
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Греческий Национальный Космический Комитет Hellenic National Space
Committee (HNSC)/Греция.
Индийская Организация Космических исследований Indian Space Research
Organization (ISRO)/Индия.
Институт космических исследований (ИКИ) Institute of Space Research
(IKI)/Российская Федерация
Научно-исследовательский институт элементарных частиц и ядерной физики
Research Institute for Particle & Nuclear Physics (KFKI)/Венгрия.
Корейский Аэрокосмический исследовательский институт Korea Aerospace
Research Institute (KARI)/Корея.
Министерство связи Ministry of Communications (MOC)/Израиль.
Национальный институт техники Информации и Связи National Institute of
Information and Communications Technology (NICT)/Япония.
Национальная администрация по изучению океанов и атмосферы National Oceanic
& Atmospheric Administration (NOAA)/США.
Национальная Космическая Организация National Space Organization
(NSPO)/Китай, Тайбэй (Тайвань).
Военно-морской Центр Космических Технологий Naval Center for Space
Technology (NCST)/США.
Научно-технический исследовательский Цент Турции Scientific and Technological
Research Council of Turkey (TUBITAK)/ Турция.
Комиссия по исследованию космоса и верхних слоев атмосферы Space and Upper
Atmosphere Research Commission (SUPARCO)/Пакистан
Шведская космическая корпорация Swedish Space Corporation (SSC)/Швеция.
Геологическая служба США United States Geological Survey (USGS)/США.
CCSDS 414.1-B-1
Стр. 1-3а
январь 2010 г..
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
КОНТРОЛЬ СОСТОЯНИЯ ДОКУМЕНТА
Документ
Наименование и выпуск
CCSDS
414.0-G-0
PN Системы измерения дальности, Январь
Зеленая книга, проект,
2010 г.
Издание предвыпускное
CCSDS 000.0-G-0
Дата
Стр. 1-1
Статус
Текущий проект
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
СОДЕРЖАНИЕ
Раздел
Страница
КОНТРОЛЬ СОСТОЯНИЯ ДОКУМЕНТА ................................................................. 1-1
СОДЕРЖАНИЕ .................................................................................................................. 1-2
1 ВВЕДЕНИЕ ................................................................................................................... 1-4
1.1 ЦЕЛЬ И ВОЗМОЖНОСТИ .................................................................................. 1-4
1.2 ОБЛАСТЬ ПРИМЕНИЯ ....................................................................................... 1-4
1.3 ССЫЛКИ................................................................................................................ 1-5
1.4 ОПРЕДЕЛЕНИЯ И УСЛОВНЫЕ ОБОЗНАЧЕНИЯ .......................................... 1-7
1.4.1 ОПРЕДЕЛЕНИЯ ....................................................................................... 1-7
1.4.2 УСЛОВНЫЕ ОБОЗНАЧЕНИЯ ................................................................ 1-8
1.4.3 АББРЕВИАТУРЫ И СОКРАЩЕНИЯ .................................................... 1-8
2 РЕГЕНЕРАТИВНЫЕ PN СИСТЕМЫ ИЗМЕРЕНЯ ДАЛЬНОСТИ ................ 2-10
2.1 ОСНОВЫ СХЕМ PN ИЗМЕРЕНИЙ ДАЛЬНОСТИ ........................................ 2-10
2.2 СТРУКТУРА PN КОДА ..................................................................................... 2-12
2.2.1 ФОРМИРОВАНИЕ PN КОДА T4B ....................................................... 2-12
2.2.2 ФОРМИРОВАНИЕ PN КОДА T2B ....................................................... 2-14
2.2.3 СВОЙСТВА КОДА ................................................................................. 2-14
2.2.4 СПЕКТРАЛЬНЫЕ ДИАГРАММЫ ....................................................... 2-16
2.3 МОДУЛЯЦИЯ ..................................................................................................... 2-21
2.3.1 ЧИПОВАЯ СКОРОСТЬ РАДИОЛИНИИ «ЗЕМЛЯ-БОРТ» ............... 2-21
2.4 ВХОЖДЕНИЕ В СВЯЗЬ (СИНХРОНИЗМ) НА БОРТУ................................. 2-23
2.4.1 ПРЕДИСЛОВИЕ ..................................................................................... 2-23
2.4.2 СТРУКТУРА БОРТОВОГО ПРОЦЕССОРА ДЛЯ РЕГЕНЕР
АТИВНОГО КАНАЛА ........................................................................... 2-23
2.4.3 ОЦЕНКА ТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК ................................ 2-25
2.4.4 БОРТОВЫЕ АППАРАТНЫЕ СРЕДСТВА ПРИМЕНЕНИЕ И
ОГРАНИЧЕНИЯ ..................................................................................... 2-33
2.5 ФЛЮКТУАЦИИ ОТСЛЕЖИВАНИЯ PN КОДА НА БОРТУ ........................ 2-36
2.5.1 СЛУЧАЙ ПРЯМОУГОЛЬНО-ПРЯМОУОЛЬНОГО
СОВМЕЩЕНИЯ...................................................................................... 2-36
2.5.2 СЛУЧАЙ СИНУСОИДАЛЬНО-ПРЯМОУГОЛЬНОГО
СОВМЕЩЕНИЯ...................................................................................... 2-41
2.5.3 СРАВНЕНИЕ ХАРАКТЕРИСТИК СИНУСОИДАЛЬНОГО И
ПРЯМОУГОЛЬНОГО ФОРМИРОВАНИЯ .......................................... 2-42
2.6 ВХОЖДЕНИЕ В СВЗЬ (СИНХРОНИЗМ) НА СТАНЦИИ ............................ 2-45
2.6.1 ВВЕДЕНИЕ.............................................................................................. 2-45
2.6.2 СТРУКТУРА ПРОЦЕССОРА ОБРАБОТКИ PN СИГНАЛА
ДАЛЬОСТИ НА НАЗЕМНОЙ СТАНЦИИ........................................... 2-45
2.6.3 ОЦЕНКА ФУНКЦИОНИРОВАНИЯ .................................................... 2-46
2.7 НАЗЕМНАЯ СТАНЦИЯ И ФЛЮКТУАЦИИ СКВОЗНОГО КАНАЛА ....... 2-52
2.7.1 ВВЕДЕНИЕ.............................................................................................. 2-52
2.7.2 ХАРАКТЕРИСТИКИ СТРУКТУРЫ БЕЗ ОБРАТНОЙ СВЯЗИ ......... 2-53
2.7.3 ХАРАКТЕРИСТИКИ СКВОЗНОГО КАНАЛА ................................... 2-61
2.8 ВЗАИМНОВЛИЯНИЕ С ТЕЛЕМЕТРИЕЙ И ТЕЛЕКОМАНДАМИ ............ 2-68
2.8.1 ВВЕДЕНИЕ.............................................................................................. 2-68
CCSDS 000.0-G-0
Стр. 1-2
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
3
4
2.8.2 СОВМЕЩЕННАЯ РАДИОЛИНИЯ «ЗЕМЛЯ-БОРТ»
ТЕЛЕКОМАНДЫ И ДАЛЬНОСТЬ ....................................................... 2-68
2.8.3 СОВМЕЩЕННАЯ РАДИОЛИНИЯ «БОРТ-ЗЕМЛЯ»
ТЕЛЕМЕТРИЯ И ДАЛЬНОСТЬ ............................................................ 2-72
ТРАНСПАРАНТНЫЕ PN СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ .............. 3-1
3.1 ВВЕДЕНИЕ............................................................................................................ 3-1
3.2 ВЫБОР ПОСЛЕДОВАТЕЛЬНОСТИ T2B .......................................................... 3-1
3.3 СРАВНЕНИЕ С РЕГЕНЕРАТИВНЫМ СЛУЧАЕМ.......................................... 3-2
3.3.1 ОБРАБОТКА НА СТАНЦИИ: ЗАХВАТ И ОТСЛЕЖИВАНИЕ .......... 3-2
3.3.2 ОБРАБОТКА НА БОРТУ ......................................................................... 3-2
PN ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЧЕРЕЗ НЕКОГЕРЕНТНЫЙ
ТРАНСПОНДЕР........................................................................................................... 4-1
4.1 ПРИЕМНИК НАЗЕМНОЙ СТАНЦИИ С ПЕТЛЁЙ БЕЗ ОБРАТНОЙ
СВЯЗИ .................................................................................................................... 4-1
4.2 ПРИЕМНИК НАЗЕМНОЙ СТАНЦИИ С ЗАМКНУТОЙ ПЕТЛЁЙ
(С ФАП-ОМ) .......................................................................................................... 4-2
CCSDS 000.0-G-0
Стр. 1-3
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
1
1.1
ВВЕДЕНИЕ
ЦЕЛЬ И ВОЗМОЖНОСТИ
Потребность точного определения положения космического аппарата относительно наземной
станции слежения, другого космического аппарата, и намеченной цели его полета являются
основополагающим для космической навигации. Измерение дальности, в его классической
форме, начинается с передачи на борт, модулированного известным сигналом дальности,
сигнала радиолинии «земля-борт» затем ретрансляция его космическим аппаратом и,
наконец, выделение его из сигнала радиолинии «борт-земля» Полное время прохождения
света туда и обратно, связанное с этим циклом в результате дает измерение дальности.
В нерегенеративных методах измерения дальности, например, таких как тональные
измерения, бортовой транспондер производит только фазовую демодуляцию и перенос
модуляции несущей. Когда сигнал дальности ретранслирован или повторно передан
космическим аппаратом, переданный на борт шум также модулирует несущую радиолинии
«борт-земля», внося потери на трассе как 1/r4. Для типовых полетов в дальнем космосе,
мощность шумов в канале измерения дальности транспондера, может быть на 30 - 40 децибел
больше чем мощность сигнала дальности, таким образом ухудшается точность измерения
дальности.
Потребность в повышении точности измерений очевидна, поскольку в новых поколениях
межпланетных космических полетов необходимо формировать орбиты выведения, собирать
научные радио-данные, или осуществлять перелет к отдаленным планетам, таким образом
претерпевая большие потери на трассе. Регенеративный метод измерения дальности
обеспечивает удаление из сигнала радиолинии «борт-земля» передаваемые на борт шумовые
составляющие, таким образом увеличивая отношение С/Ш (отношение сигнала к шуму) на
наземной станции (1/r2 против 1/r4), в результате улучшая точность измерений дальности, и
давая возможность разработчику радиолинии выделить большую часть мощности для
телеметрии.
CCSDS обратился к этой проблеме, предоставляя рекомендацию для двух случаев
регенеративного измерения дальности; один, когда приоритетом является точность
измерений и, другой, когда основной интерес представляет время вхождения в связь
(захвата). Рекомендация для прозрачного (нерегенеративного) измерения дальности также
предлагается. Эти рекомендации были выбраны на основе оценки качества
функционирования системы по нескольким ключевым показателям, включая: точность
измерения дальности, время захвата, влияние на режимы телекоманд и телеметрии, а также
конструктивное исполнение аппаратных средств.
Данная Зеленая Книга является дополнительным документом к Рекомендуемому Стандарту
CCSDS «Псевдошумовые (PN) Системы измерения дальности» [26].
1.2
ОБЛАСТЬ ПРИМЕНИЯ
На основании, отмеченного в предыдущем разделе, а именно, существенного улучшения
отношения сигнал-шум (до 30 дБ) на наземной станции, предлагаемые этим стандартом два
метода регенеративного измерения дальности, особенно хорошо подходят для больших
расстояний, как для дальних космических полетов, так и для полетов в точки Лагранжа, где
существующие условия, создают низкое отношение сигнал-шум. Эти методы включают в
себя код измерения дальности Таусворта, =4 (T4B), применимый к сценариям, где
CCSDS 000.0-G-0
Стр. 1-4
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
приоритет отдается точности измерений, и код Таусворта, =2 (T2B), для измерений
дальности, где основной интерес представляет время захвата. Последний код также
рекомендуется применять для транспарантного (прозрачного) измерения дальности, или
измерений с возвратом, когда высокая точность измерений не требуется.
Эти коды не предназначены для применения в системах с многостанционным доступом и
кодовым разделением каналов (CDMA) или для уменьшения плотности потока мощности, изза мощной спектральной составляющей тактовой частоты сигнала дальности.
CCSDS или его члены не несут ответственность за любые непредвиденные, непрямые, или
косвенные убытки, включая любую потерю прибыли, потерю сбережений, или потерю
данных, или за любые претензии другой стороны, связанной с ошибками или упущениями в
данном сообщении.
1.3
ССЫЛКИ
В данном Сообщении имеются ссылки на следующие документы. На момент публикации,
обозначенные издания были действующими. Все документы периодически подвергаются
пересмотру, и поэтому пользователи данного Сообщения всячески стимулируются по
изысканию возможностей применения самых последних выпусков указанных ниже
документов. Секретариат CCSDS поддерживает официальный перечень действующих в
настоящее время документов CCSDS.
[1]
“Pseudo-Noise (PN) Ranging System Blue Book”, CCSDS 414.1-B-1, Issue 1, March 2009.
«Псевдошумовые (PN) системы измерения дальности», CCSDS 414.1-B-1,выпуск 1,
март 2009 г. (русский перевод)
[2]
“Regenerative pseudo-noise (PN) ranging sequences for deep-space missions”, J.L.Massey,
G.Boscagli and E.Vassallo, Int. J. Satell. Commun. Network. 2007; 25:285–304.
[3]
“Pseudo-Noise Ranging for Future Transparent and
P. Holsters, G.Boscagli, E.Vassallo, AIAA Space Ops 2008.
[4]
J.L. Massey, “Study on PN Ranging codes for Transparent Channels”, Final Report, ESA
Contract No 20432/07/D/CS(SC) , JLM Consulting, Copenhagen, 19 November 2007.
[5]
“Delta-DOR and Regenerative Systems: The New CCSDS Frontier in Spacecraft Ranging”,
E.Vassallo, G.Boscagli, D.Lee, W.L.Martin, AIAA Space Ops 2006.
[6]
J. L. Massey, Final Report ESOC Contract No. 17954/03/D/CS(SC), “Study on PN Ranging
Codes for Future Missions”, JLM Consulting, Copenhagen, December 2004.
[7]
“NASA DSMS Telecommunications Link Design Handbook, 214 Pseudo-Noise and
Regenerative Ranging”, 810-005, Rev. E, March 31, 2004.
[8]
R. C. Titsworth [subsequent to publication of this paper, the author changed his surname to
Tausworthe], “Optimal Ranging Codes”, IEEE Trans. Space Elec. & Telem., vol. SET-10,
pp. 19-30, March 1964.
CCSDS 000.0-G-0
Стр. 1-5
Regenerative
Channels”,
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
[9]
“PN Regenerative Ranging and its Compatibility with Telecommand and Telemetry Signals”
G.Boscagli, P.Holsters, E.Vassallo, and M.Visintin, IEEE, Special Issue on Deep Space, Nov
2007.
[10]
“Regenerative Pseudo-Noise Ranging: Overview of current ESA’s Standardization
Activities”, G.Boscagli, P.Holsters, L.Simone, E.Vassallo, M.Visintin, , 4th ESA
Workshop on Tracking, Telemetry and Command Systems for Space Applications,
ESA/ESOC Darmstadt, 11-15 September 2007.
[11]
“On open and closed loop ranging jitter performance (AI_07-07)” CCSDS (Space Link
Services, Ranging Working Group, SLS-RNG_08-02), G.Boscagli, P.Holsters, E.Vassallo,
and M.Visintin.
[12]
“Performance-based Evaluation of Selected PN Ranging Codes for on-board Regeneration”,
ESOC Contract 18689/04/D/C, EuroConcepts (M.Visintin, M.Mondin).
[13]
“Propose figures for XPND linearity, gain flatness, 3 dB bandwidth and group delay
variation for the selected PN Ranging scheme(s )”, SLS-RNG_05-04, 29 Nov-2 Dec 2005,
G.Boscagli, P.Holsters, L.Simone.
[14]
“End-to-End Ranging Jitter”, G.Boscagli, P.Holsters, L.Simone, CCSDS SLS-RNG_08-06,
21-25 April 2008.
[15]
“Telecommunications System Engineering”, W.C.Lindsey and M.K.Simon, Englewood
Cliffs, N.J., 1973.
[16]
“Telemetry BER with Unsynchronized Ranging Signal Interference”, M.Visintin, G.Boscagli,
CCSDS SLS-RNG_06-02, 12-16 June, 2006.
[17]
“Ranging System Performance with Unsynchronized Telemetry Interference”, M.Visintin,
G.Boscagli, CCSDS SLS-RNG_06-03, 12-16 June, 2006.
[18]
“Performance of the ranging clock synchronizer in the presence of telemetry interference”,
M.Visintin, G.Boscagli, CCSDS SLS-RNG 06-04, 12-16 June,
[19]
“Reciprocal influence between ranging codes and TC/TM”, G.Boscagli, E.Vassallo,
M.Visintin, CCSDS SLS-RNG 05-06, 29 Nov-2 Dec 2005,
[20]
“AI_04-08: Analyze the RFI of all proposed PN Ranging Schemes with TC/TM”,
G.Boscagli, P.Holsters, CCSDS SLS-RNG_05-03, 29 Nov-2 Dec 2005
[21]
“Recommendation for PN sequences for use in transparent ranging”, P.Holsters, G.Boscagli,
E.Vassallo, B.Smeds, J.L.Massey, SLS-RNG_08-03, April 21-25, 2008.
CCSDS 000.0-G-0
Стр. 1-6
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
[22]
“Transparent PN Ranging and Comments on White Book”, D.Lee, W.Martin, SLS-RNG_0811, April 21-25, 2008.
[23]
“AI_06-03: Complete the Transparent channel analysis by including the TC signal with a
low pass transponder channel”, P. Holsters, SLS-RNG_07-05, CCSDS Ranging WG
meeting, Fall 2007.
[24]
“AI_05-07: Influence of transparent ranging channel on the acquisition time”, G.Boscagli,
P.Holsters, SLS-RNG_06-08, 12-16 June 2006.
[25]
“PN Ranging Acquisition Performance Results based on Threshold Comparison with Soft
and Hard Quantized Correlators”, M. Maffei, L. Simone, G. Boscagli, SLS-RNG_09-05,
26-30 October 2009.
[26]
“CCSDS Pseudo-Noise (PN) Ranging Systems”, Recommended Standard, CCSDS 414.1-B1, March 2009.
[27]
“CCSDS Radio Frequency and Modulation Systems – Part 1, Earth Stations and
Spacecraft”, Recommended Standard, CCSDS 401.0-B-20, April 2009.
[28]
“PN Ranging Signal Spectra”, E. Vassallo, M. Visintin, SLS-RNG_09-07, 26-30 October
2009.
1.4
ОПРЕДЕЛЕНИЯ И УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
1.4.1 ОПРЕДЕЛЕНИЯ
В тексте данного Сообщения применяются следующие определения:
чиповая скорость (chip rate): скорость, с которой передаются биты («чипы») PN кода.
когерентный транспондер (coherent transponder): приемопередатчик, у которого несущая
частота радиолинии «борт-земля» когерентна по фазе с несущей частотой принимаемой
по радиолинии «земля-борт».
компоненты последовательности (component sequences): семейства коротких PN
последовательностей, используемых для формирования с помощью логических
операций PN кодов измерения дальности.
тактовый сигнал дальности (range clock): PN компонента кода самой высокой частоты (т.е.
с самым коротким периодом); определяет разрешающую способность по дальности.
регенеративное измерение дальности (regenerative ranging): способ измерения дальности,
когда на космическом аппарате производится демодуляция и выделения кода дальности
путем сопоставления его с локальной точной копией кода сигнала дальности,
передаваемого на борт, и регенерирование кода дальности для передачи по радиолинии
«борт-земля».
транспарантное измерение дальности (transparent ranging): способ измерения дальности,
когда на космическом аппарате сигнал измерения дальности, передаваемый по
радиолинии «земля борт» транслируется в радиолинию «борт-земля» без выделения (т.
CCSDS 000.0-G-0
Стр. 1-7
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
е, не регенеративное измерение дальности или измерение двойной дальности туда и
обратно)
однопутевой разброс измерений (one-way jitter): значение разброса (флюктуаций)
измерений дальности в метрах полученное в результате измерений времени
распространения света туда и обратно деленного на два, чтобы вычислить расстояние.
1.4.2 УСЛОВНЫЕ ОБОЗНАЧЕНИЯ
В данном документе использованы следующие условные обозначения:
– A ‘+1’ чип дальности соответствующий значению двоичного 0;
– A ‘-1’ чип дальности соответствующий значению двоичной 1.
1.4.3 АББРЕВИАТУРЫ И СОКРАЩЕНИЯ
BL
c
Ci
CTL
DTTL
Ec
2EC /N0
Fc
fRC
L
Li
N0
NCO
PACQ
PN
PR
PRC
PR/ N0
r.v.
TACQ
TACQ_S/C
TACQ_G/S
TC
Tc
TM
Tr = LTc
T4B
T2B
CCSDS 000.0-G-0
Односторонняя шумовая полоса ФАП
Скорость света
Компоненты или измерительные последовательности (i =1...6)
Схема отслеживания чипа (Chip Tracking Loop)
Схема отслеживания перехода данных (Data Transition Tracking Loop)
Энергия чипа (Вт/Гц)
Отношение сигнала чипа к шуму (превышение энергии чипа над
односторонней спектральной плотностью шума)
Частота чипа, чиповая скорость (Гц)
Тактовая частота сигнала дальности (Гц)
Длина PN последовательности (количество чипов)
Длина измерительной последовательности Ci (количество чипов)
Односторонняя мощность спектральной плотности шума (Вт/Гц)
Генератор с числовым управлением
Вероятность захвата (для последовательности измерения дальности)
Псевдошумовая последовательность
Мощность сигнала дальности (Ватт)
Мощность составляющей тактовой частоты (Ватт)
Превышение мощности сигнала дальности над мощностью
спектральной плотности шума (Гц)
Случайная переменная (random variable)
Время захвата сигнала дальности (с)
Время захвата сигнала дальности на борту КА (с)
Время захвата сигнала дальности на наземной станции (с)
Телекоманда
Период чипа (с)
Телеметрия
Длина одного периода последовательности
Балансный код Таусворта с взвешенной оценкой, голосов =4
Балансный код Таусворта с взвешенной оценкой, голосов =2
Стр. 1-8
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
ρ*ik
CCSDS 000.0-G-0
Совпадающая по фазе частичная корреляция
Несовпадающая по фазе частичная корреляция .
Нормализованные коэффициенты корреляции (т.е., протяжённость
блока и время корреляции равняются длине одной последовательности
Tr = LTc)
Масштабный коэффициент корреляции
Стр. 1-9
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
2
2.1
РЕГЕНЕРАТИВНЫЕ PN СИСТЕМЫ ИЗМЕРЕНЯ ДАЛЬНОСТИ
ОСНОВЫ СХЕМ PN ИЗМЕРЕНИЙ ДАЛЬНОСТИ
Под системой последовательностей измерения дальности мы будем подразумевать систему,
в которой периодический набор бинарных (±1) последовательностей сигналов измерения
дальности модулирует несущую1 радиолинии "земля-борт", чтобы создать сигнал, который
передается наземной станцией на транспондер космического аппарата, расстояние от
наземной станции до которого должно быть измерено. Модулированная таким образом
несущая радиолинии "земля-борт" принятая и обработанная транспондером космического
аппарата, либо просто ретранслируется (нерегенеративный) метод, либо демодулируется и
регенерируется, чтобы удалить переданный на борт шум, затем повторно передается на
наземную станцию, где производится измерение полной задержки между переданными и
принятым сигналами. Регенеративные измерения дальности обеспечивает существенный
энергетический выигрыш, который в предлагаемых системах может достигать до 30 децибел,
по сравнению с нерегенеративными измерениями что, как ожидается, может стать
определяющим в большинстве предстоящих дальних космических полетах. Понятие
“Псевдошумовые (PN) измерения дальности”, в строгом смысле, относитя к использованию
системы последовательностей измерения дальности, в которой последовательность
измерения дальности является логической комбинацией из, так называемой,
последовательности
таковой
частоты
и
нескольких
псевдошумовых
(PN)
последовательностй. Последовательность тактовой частоты дальности представляет собой
последовательность чередования +1 и -1 с периодом 2. Псевдошумовая (PN),
последовательность является бинарной последовательностью ±1 с периодом L,
периодическая функция автокорреляция которой имеет пиковое значение +L , а все (L-1)
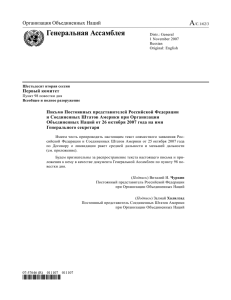
непиковые значения, равны -1. Рисунок 1 иллюстрирует часть формы сигнала такой
последовательности, а также соответствующую форму сигнала тактовой частоты дальности,
которая представляет собой прямоугольные импульсы основной частоты.
f RC
1
.
2TC
Рисунок1. (a) Форма сигнала последовательности измерения дальности для чипа структуры
...+1 –1 –1 –1 +1 –1 +1...
(b) Соответствующая форма сигнала тактовой часты для прямоугольной формы чипа
1
Для стандартных систем телеметрии и коммуникаций (TT&C) используется фазовая модуляция
CCSDS 000.0-G-0
Стр. 2-10
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Во всех практических системах измерения дальности, дальномерная последовательность
выделяется приемником как результат корреляций между принятой последовательностью и
некоторой известной ±1 периодической последовательностью (и её циклических сдвигов),
периоды которых являются делителями периода дальномерной последовательности и
которые в дальнейшем мы будем именовать зондирующие последовательности.
Зондирующие последовательности связаны, некоторым образом с дальномерной
последовательностью, например, дальномерная последовательность может быть
последовательностью, получающейся в результате своего рода голосования чипами всех
зондирующих последовательностей в одно и то же время. Производится корреляция (то есть,
перемножение чип на чип, с последующим суммированием) принятой дальномерной
последовательности с моделью каждой зондирующей последовательности и ее
несовпадающими циклическими сдвигами, чтобы определить, какой циклический сдвиг
является "совпадающим по фазе" с принятой последовательностью за пределами части
принятой последовательности, где корреляция выполнена. Зондирующие последовательности
должны иметь свойство, которое состоит в том, что, когда все эти "совпадающие по фазе"
решения выполнены правильно, они определяют задержку (по модулю периода L
дальномерной последовательности) в чипах принятой дальномерной последовательности
относительно соответствующей ее модели (локальной точной копии).
Для зондирующих пследовательностей существуют два важных качественных критерия:
время сихронизации (захвата);
особенности спектра (спектральные свойства).
Критерий "время синхронизации (захвата)" относится к времени, которое требуется, чтобы
выполнить корреляции зондирующих последовательностей и их циклических сдвигов и
должно быть как можно меньше. Поскольку присутствие в компоненте дальномерной
последовательности, пропорциональной зондирующей последовательности, которая
определяет эффективность корреляции с этой зондирующей последовательностью, спектр и
форма сигнала зондирующей последовательности должны быть такими, чтобы они
существенно не ослаблялись фильтрацией в передатчике дальномерной последовательности,
как например, может потребоваться, чтобы избежать взаимовлияния между сигналом
измерения дальности и другим составляющими сигнала TT&C (например, сигналом
телеметрии).
Есть два важных качественных параметра измерения дальности
случайно-шумовые отклонения;
разрешение неоднозначности.
Первая задача приемника (после фазовой демодуляции принятого фазомодулированного
сигнала) состоит в том, чтобы произвести захват по тактовой частоте дальномерного сигнала.
Отслеживание тактовой частоты сопровождается флюктуациями (из-за тепловых помех)
которые определяют среднеквадратическое отклонение измерений в метрах.
После захвата по тактовой частоте, приемник производит некоторым образом корреляции
дальномерной последовательности с принятой дальномерной последовательностью, чтобы
определить целое число чипов, по модулю периода L в чипах дальномерной
последовательности, на которое сигнал был задержан при его расспрстранении по
CCSDS 000.0-G-0
Стр. 2-11
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
замкнутому маршруту от наземной станции. Неоднозначность (однопутевая) периода
дальномерной последовательности в метрах определяется как
U
1
cL
c L Tc
2
4 f RC
Например, при L = 1 009 470 чипов и f RC 10 6 Гц, U 75 710 000 м или около 75 710 км.
При анализе оценки времени синхронизации для различных дальномерных
последовательностей, одним из главных контрольных параметров является отношение
сигнал-шум чипа 2 Ec / N0 , где Ec - энергия принятого чипа, а N 0 / 2 - двусторонняя
спектральная плотность мощности аддитивного Гауссовского шума. Это отношение может
быть связано с отношением сигнала измерения дальности к спектральной плотности шума
как
2 EC
1 PR
N0
f RC N 0
Следует отметить, что при тактовой частоте дальности f rc 106 Гц и PR / N 0 +27 дБГц
отношение сигнала к спектральной плотности шума 2EC / N0 дает значение -33 дБ.
2.2
СТРУКТУРА PN КОДА
Имеется два PN кода, для регенеративного измерения дальности, рекомендованные
стандартом на PN измерения дальности . Оба кода имеют подобную структуру и происходят
из одного и того же семейства PN кодов, но отличаются по численности компонент тактовой
частоты.
Первый PN код называют балансный код Таусворта с взвешенной оценкой (ν=4), или
сокращено как T4B. Этот код имеет более сильную составляющую тактовой частоты и
обеспечивает большую точность измерения дальности за счет немного более длительного
времени синхронизации (захвата). Таким образом код T4B должен использоваться для систем
измерения дальности, в которых точность измерений представляет первостепенный интерес,
таких как научные радиоизмерения.
Другой рекомендованный PN код - балансный код Таусворта с взвешенной оценкой (ν=2),
сокращенно как T2B. Этот код имеет более слабую компоненту тактовой частоты
относительно других компонент, и будет иметь более короткое время синхронизации
(захвата) за счет больших флюктуаций в измерениях дальности. Код T2B должен
использоваться для систем измерения дальности, где первостепенный интерес представляет
время синхронизации (захвата), например в полетах, когда отношение сигнал шум по
дальности очень низкое.
2.2.1 ФОРМИРОВАНИЕ PN КОДА T4B
Структура кодов T4B и T2B основана на композитном (сложном) коде, построенном из
логических комбинаций шести периодических составляющих PN последовательностей,
первоначально полученных Таусвортом [8]. Шесть составляющих последовательностей
показаны в Таблице 2-1.
CCSDS 000.0-G-0
Стр. 2-12
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Таблица 2–1. Составляющие PN последовательности
Код
C1
C2
C3
C4
C5
C6
Длина компоненты
2
7
11
15
19
23
Последовательность чипов
1, -1
1, 1, 1, -1, -1, 1, -1
1, 1, 1, -1, -1, -1, 1, -1, 1, 1, -1
1, 1, 1, 1, -1, -1, -1, 1, -1, -1, 1, 1, -1, 1 -1
1, 1, 1, 1,-1, 1, -1, 1, -1, -1, -1, -1, 1, 1, -1, 1, 1, -1, -1
1, 1, 1, 1, 1, -1, 1, -1, 1, 1, -1, -1, 1, 1, -1, -1, 1, -1, 1, -1, -1, -1, -1
Каждая составляющая последовательность помещена в циклический сдвиговый регистр
длиной, равной длине составляющей компоненты и тактирована частотой передачи чипов
(чиповой скоростью). Композитный код T4B сформирован из комбинации выходных
сигналов сдвиговых регистров, используя следующую формулу:
C sign (4C1 C2 C3 C4 C5 C6 )
Выход каждого сдвигового регистра соединен обратной связью со входом, так, что каждый
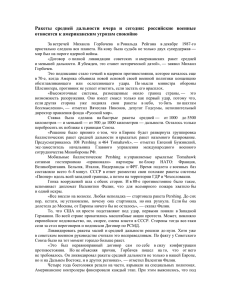
компонент повторяет себя с периодом, равным длине составляющей. На Рисунке 2 показана
функциональная диаграмма формирования PN кода T4B
Так как sign функция, значение сложного кода C в формуле приведенной выше может
интерпретироваться
как
определяемое
голосами
от
шести
составляющих
последовательностей (отрицательный знак просто означает, что составляющая
последовательность инвертирована). Обратите внимание, что C1 умножен на четыре, и таким
образом имеет четыре "голоса", в то время как другие пять компонент имеют только по
одному "голосу". Так как компонента C1 - компонента тактовой частоты дальности, это
означает, что код T4B имеет относительно сильную компоненту тактовой частоты.
где объединенная последовательность есть C = sign(4C1+ C2 − C3 − C4 + C5 − C6)
Рисунок 2. Формирование PN кода T4B
CCSDS 000.0-G-0
Стр. 2-13
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
2.2.2 ФОРМИРОВАНИЕ PN КОДА T2B
Составляющие последовательности, используемые для кода T2B идентичны используемым
для T4B. Чтобы сформировать композитный (сложный) код, схема логического объединения
T2B дает:
C sign (2C1 C2 C3 C4 C5 C6 )
Обратите внимание, что комбинаторная логика идентична той, которая использовалась для
формирования кода T4B, кроме компоненты C1, весовой коэффициент которой только два (то
есть, два "голоса"). Таким образом этот код имеет более слабую компоненту тактовой
частоты. На Рисунке 3 показана блок схема формирования PN кода T2B
где объединенная последовательность есть C = sign(2C1 + C2 − C3 − C4 + C5 − C6)
Рисунок 3. Формирование PN кода T2B
2.2.3 СВОЙСТВА КОДА
2.2.3.1
Длина кода
Все длины составляющих последовательностей для T4B и T2B являются взаимно простыми,
таким образом сложный код будет иметь период равным произведению составляющих длин.
Так как составляющие последовательности идентичны для обоих кодов, длина композитного
кода L для кодов T4B и T2B составит:
L 2 7 11 15 19 23 1009470 чипов
2.2.3.2
Дисбаланс кода
Другая особенность кода - баланс между количеством 1’ и -1’ в объединенной (композитной)
последовательности. Дисбаланс приводит к появлению в спектре PN кода постоянной
составляющей. Инвертируя компоненты C3, C4, и C6 (как сделано в объединяющей логике),
дисбаланс кода может быть уменьшен. В Таблице 2-2 показан дисбаланс для кодов T4B и
T2B.
CCSDS 000.0-G-0
Стр. 2-14
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Таблица 2–2. Дисбаланс кода
Длина
Самый
Самый
Величина
Количест- Количестпоследовадлинный длинный Дисбаланс
пост.
во 1’
во -1’s
тельности
период 1’ период -1’
составл.
T4B
1009470
504583
504887
7
5
304
3,01E-4
T2B
1009470
504033
505437
9
9
1404
1,39E-3
2.2.3.3
Ослабление тактовой частоты дальности
Ослабление тактовой частоты дальности есть критерий, определяющий весовое значение
(силу) тактовой частоты в композитной последовательности относительно немодулированной
структуры прямоугольной формы (то есть, чередование 1,-1). Оно оказывает прямое влияние
на точность измерения дальности. Ослабление тактовой частоты дальности связано обратно
пропорциональной зависимостью с числом переходов в композитной последовательности,
как показано в Таблице 2-3.
Таблица 2–3. Ослабление тактовой частоты
Количество переходов
Ослабление тактовой
частоты дальности
T4B
945480
0,550 дБ
T2B
717618
4,049 дБ
2.2.3.4
Свойства корреляции
Корреляция между композитным PN кодом и составляющими последовательностями также
важна. Существуют две оценки корреляции, которые будут рассмотрены. Совпадающая по
фазе корреляция имеет место, когда составляющая последовательность синхронизирована с
соответствующей ей компонентой в сложном PN коде. Несовпадающая по фазе корреляция
имеет место, когда составляющая последовательность задержана на величину от 1 до L-1
чипов (где L - длина составляющей последовательности) относительно соответствующей ей
компоненты в композитном PN коде. Для компоненты тактовой частоты, несовпадающая по
фазе корреляция является всегда противоположной (негативной) относительно совпадающей
по фазе корреляции (противофазный сигнал).
В Таблице 2-4 показаны оценки совпадающей по фазе и несовпадающей по фазе корреляции
для PN кодов T4B и T2B. Корреляции вычислены по всей длине сложного PN кода, повторяя
каждую составляющую последовательность, пока их длины не идентичны. Нормализованные
совпадающие по фазе и несовпадающие по фазе оценки корреляции могут использоваться
для того, чтобы вычислить время захвата компонент разрешающих неоднозначность
(например, C2 внутри C6). Нормализованная совпадающая по фазе корреляция C1 определяет
ослабление тактовой частоты дальности как:
Ослабление тактовой частоты n = - 20 log (C1 совпадающая по фазе корреляция/длина
последовательности)
CCSDS 000.0-G-0
Стр. 2-15
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Таблица 2–4. Синфазная и сдвинутая по фазе корреляции
T4B синфазная
корреляция
T4B сдвинутая по
фазе корреляция
T2B синфазная
корреляция
T2B сдвинутая по
фазе корреляция
C1
947566
-947566
633306
-633306
C2
61904
-10368
247020
-41404
C3 (инвертир.)
61904
-6160
250404
-24900
C4 (инвертир.)
61904
-4400
251332
-17852
C5
61904
-3456
251604
-14056
C6 (ивертир.)
61904
-2800
251940
-11388
2.2.4 СПЕКТРАЛЬНЫЕ ДИАГРАММЫ
На приведенных ниже рисунках (см. Рисунок 4, Рисунок 5, Рисунок 6, Рисунок 7):
представлены измеренные спектры для двух рекомендованных схем Таусворта (T4B и T2B) с
прямоугольным формированием (см. раздел 2.3), при различных диапазонах частот
сканирования и следующих параметрах модуляции:
Чиповая скорость = 2,5 Мчип/с;
Частота несущей 10 МГц;
Индекс модуляции = 1 рад-пик.
В результате, мы имеем:
сильную тактовую компоненту на половинной частое передачи чипов или на тактовой
частоте (1,25 МГц);
кривую вида sin (x)/x, из-за влияния более длинных повторяющихся компонент, которые
определяют псевдослучайность кода, с нулями в точках кратных чиповой скорости;
дискретную компоненту на частотах кратных нечетным значениям тактовой частоты;
разное распределение энергии компонент PN кода для различных кодов (из-за
различного весового мажоритарного голосования).
CCSDS 000.0-G-0
Стр. 2-16
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Рисунок 4. - Спектр кода T4B
Рисунок 5. Спектр кода T4B, крупным планом
CCSDS 000.0-G-0
Стр. 2-17
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Рисунок 6. - Спектр кода T2B
Рисунок 7. – Спектр кода T2B, крупным планом
CCSDS 000.0-G-0
Стр. 2-18
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Подобные графики были получены по измерениям для случая с синусоидальным
формированием (см. раздел 2.3), как показано на рисунке8 и на рисунке 9. В этом случае мы
имеем:
Чиповая скорость = 1 Мчип/с;
Частота несущей приблизительно 9,56 МГц;
Индекс модуляции = 0,75 рад-пик.
residual carrier
PN clock tone__
Null-to-null bw 2.9 MHz
Рисунок 8. - T4B
Теоретические обоснования, объясняющие данные измеренные спектральные графики, а
также дополнительные теоретические и моделированные спектральные графики, можно
найти в [12] и [28]. Заключения о спектральных свойствах для этого случая:
мощная тактовая компонента на частотах равных половиной чиповой частоты (скорости)
или на тактовой частоте (0,5 MHz);
непрерывный спектр с нулями на нечетных частотах кратных тактовой частоте (n> 3)
(кроме первой) и более крутой спад относительно прямоугольного формирования;
первое положение нуля функция индекса модуляции и равное трёхкратной тактовой
частоте (1,5 МГц) только при малых значениях индекса модуляции;
дискретная компонента на частотах кратных целому числу четные и нечетные значений
тактовой частоты;
разное распределение энергии компонент PN-кода для различных кодов (из-за
различного весового мажоритарного голосования).
CCSDS 000.0-G-0
Стр. 2-19
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
остаток несущей
гармоники такт. ч-ты
Ширина полосы от нуля до нуля~2.9 МГц
Null-to-nullbw2.9 MHz
Рисунок 9 - T2B
CCSDS 000.0-G-0
Стр. 2-20
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
2.3
МОДУЛЯЦИЯ
Несущие радиолинии «земля-борт» и «борт-земля» линейно модулируются по фазе PN кодом
дальности, т.е. положительный переход от -1 к +1 в полосе модулирующих частот кода
приводит к приращению фазы радиочастотной несущей.
Обычно сигнал PN измерений дальности имеет прямоугольную форму. Однако, в
соответствии с задачами полета, может потребоваться формирование полосы модулирующих
частот, чтобы сохранить ширину полосы излучаемых частот на высоких чиповых скоростях.
В этом случае формирующий фильтр имеет следующую импульсную характеристику
(формирование синусоидальной формы):
t 0, Tc
sin( t / Tc
h(t ) hsin (t )
0
в других областях
где Tc продолжительность чипа.
Выбор схемы модуляции делается так, чтобы измерения дальности, прием телеметрии и
выдача телекоманд могли производиться одновременно, как это определено документом
CCSDS 401.0-B (2.2.4) и (2.2.7) [27].
Влияние прямоугольного и синусоидального формирования на реальный передаваемый
спектр можно найти в разделе 2.2.4.
2.3.1 ЧИПОВАЯ СКОРОСТЬ РАДИОЛИНИИ «ЗЕМЛЯ-БОРТ»
В синей книге "PN Измерения дальности" [26] определена возможность когерентности
скорости передачи чипов с несущей частотой, которая в дальнейшем может быть
использована. Цель получения когерентности кодовой скорости с передаваемой на борт
несущей состоит в том, чтобы облегчить захват кода системой предварительного управления
ФАП-ом по несущей частоте.
В Синей книге также определено что:
«Аппаратный состав наземных станций некоторых Агентств- членов CCSDS, возможно, не
позволит легко реализовать вышеупомянутые соотношения между чиповой скоростью и
несущей частотой. В таких случаях, расхождение между генерируемой величиной и
теоретической должно быть <10 миллигерц. Однако чиповая скорость должна оставаться
привязанной к эталону частоты станции».
В настоящее время стало обычным использовать для формирования последовательности
чипов генератор с цифровым управлением (ГЦУ). Частота на выходе ГЦУ задается входной
частотой тактового генератора, деленной на 2N и умноженной на целое значение n, где N число бит ГЦУ.
Например, если частота тактового генератора 17,5 МГц, а N=32 то мы получим частоту
разрешения 17,5 МГц/232 = 4,07 миллигерца
CCSDS 000.0-G-0
Стр. 2-21
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Петля (ФАП) захвата и отслеживания кода должна будет точно восстановить фазу тактовой
частоты кода, используя принятую несущую частоту для предварительной подстройки ФАП
тактовой частоты кода.
Синяя книга также определяет минимальное отношение PR/N0 равное 10 дБГц для
дальномерного сигнала в радиолинии Земле - Космос. Поэтому при выборе ширины полосы и
порядка ФАП необходимо принять во внимание, что возможное отклонение частоты может
быть до 10 мллигерц.
Когда сигнал проходит через изменяющийся ионосферный слой или заряженную плазму,
фаза несущей и групповая задержка дальномерного кода подвергается воздействию в
противоположных направлениях. Эти эффекты должны непрерывно отслеживаться при
бортовой обработке.
Для космических полетов, в которых приходится работать с низким отношением сигнала к
спектральной плотности шума, которое может составить около -10 дБГц, на приемной
наземной станции потребуется очень узкая ширина полосы ФАП по тактовой частоте. В этом
случае на приемной наземной станции при компенсации предварительной подстройкой
Доплеровского смещения частоты должно учитывать фактическое значение кодовой
скорости радиолинии "земля-борт". Это особенно важно, когда генерирование дальномерного
кода осуществляется с помощью генератора с цифровым управлением (ГЦУ), что в
результате может привести к ошибке округления чисел.
CCSDS 000.0-G-0
Стр. 2-22
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
2.4
ВХОЖДЕНИЕ В СВЯЗЬ (СИНХРОНИЗМ) НА БОРТУ
2.4.1 ПРЕДИСЛОВИЕ
Теоретическое время захвата (из синей книги) и полученное по результатам анализа
приведенного в данном разделе, основываются на том, что канал идеально линейный и при
обработке на борту реализуются:
1. Шесть параллельных корреляторов
2. Алгоритм поиска максимума2
3. Идеальная демодуляция несущей (ухудшения за счет флюктуаций отслеживания
петлей ФАП несущей не рассматриваются)
4. Идеальное отслеживание чипов (ухудшение за счет флюктуаций в петле ФАП по
чиповой частоте не рассматриваются)
5. Отсутствие влияния амплитудного квантования сигнала на выходе фильтра
обнаружения чипа (согласованный фильтр)
Кроме того ухудшения за счет влияния телекоманд в радиолинии "земля-борт" (даже
незначительное) в анализе не рассматривается; все это проанализировано в разделе 2.8.
2.4.2
СТРУКТУРА БОРТОВОГО ПРОЦЕССОРА ДЛЯ РЕГЕНЕРАТИВНОГО
КАНАЛА
Бортовые операции при регенеративном измерении дальности выполняются в два этапа:
сначала производится первичная синхронизация (захват) и выделение тактовой компоненты
дальномерного сигнала и как только это произошло, производится перебор положений
дальномерного кода, его синхронизация и отслеживание. На Рисунке 10 показан
регенеративный канал измерения дальности, как это в настоящее время осуществлено в
модели предварительной разработки X/X/Ka - транспондера для программы дальнего космоса
Bepi Colombo. Он включает в себя следующие функции:
1. Петлю отслеживания чипов для восстановления фазы и частоты кодированных
чипов и формирования соответствующего синхронизирующего сигнала для
согласованного фильтра
2. Синфазный интегратор (согласованный фильтр)
3. 1-битное квантование3 на выходе согласованного фильтра;
4. Шесть корреляторов (по одному для каждой компоненты: C1, C2,…C6)
параллельного управление для восстановления положения последовательностей
дальномерного кода;
5. Функция формирования кода в радиолинии «борт-земля»;
6. Управляющая логика для управления корреляторами и формированием кода.
Каждый коррелятор осуществляет последовательный перебор по Li возможные фазы кода
относительно зондирующей последовательности Ci. Для оптимального приемника,
результаты Li запоминаются с целью окончательного сравнения, основанного на стратегии
поиска максимума; действительно максимальное значение определяет пик корреляции и
положение фазы зондирующей последовательности Ci внутри принятой дальномерной
2
3
Это показывает следующее, что поиск максимума соответствует оптимальному решению для приемника .
Исследуется возможно применение 3-х битового мягко квантования (вместо сложности специальной
микросхемы).
CCSDS 000.0-G-0
Стр. 2-23
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
последовательности. В упрощенных реализациях рассматривается более простой методсравнение порогов, который кажется более надёжным исходя из условий эксплуатации, в
особенности в случае активного канала измерения дальности, но без данного сигнала
измерения дальности.
Когда фазы всех 6 компонент Ci восстановлены, местоположение принятой дальномерной
последовательности обнаружено, может быть разрешена передача транспондером
дальномерного сигнала. Таким образом, несущая радиолинии «борт-земля» модулируется по
фазе восстановленной последовательностью, которая синхронизирована с принятой
последовательностью (одинаковая чиповая скорость и фаза).
Рисунок 10 – Бортовая регенеративная PN обработка Bepi Colombo
CCSDS 000.0-G-0
Стр. 2-24
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
2.4.3 ОЦЕНКА ТЕХНИЧЕСКИХ ХАРАКТЕРИСТИК
2.4.3.1
Упрощенный анализ
В анализе по оценке времени захвата для различных дальномерных последовательностей,
одним из главных исходных параметров является отношение сигнал-шум чипа 2 EC / N 0 ,
где E C - энергия принятого чипа и N 0 / 2 - двусторонняя спектральная плотность мощности
аддитивного Гауссовского шума. Оно может быть связано (см. 2.4.3.1.1) с отношением
дальномерного сигнала к спектральной плотности шума как:
2 EC
1 PR
N0
f RC N 0
Теперь мы установим систему показателей, которая облегчает сравнение времени захвата для
различных структур дальномерных последовательностей. В качестве эталона для
сопоставления, мы выбираем распознавание между прямо противоположными
альтернативами, такими как распознавание между тактовой последовательностью дальности
C1 и её циклическим сдвигом вправо. В этом случае вероятность ошибки Pe2 для
совпадающего по фазе решения, при условии, что время интеграции K чипов с энергией чипа
EC и единство совпадающих по фазе частичных (дробных) корреляций, для аддитивного
белого Гауссовского шума с двусторонней спектральной плотностью мощности N0/2, дают:
Pe 2 Q 2 KEc / N 0
где
Q( x)
1
2
e
t 2 / 2
dt
x
Pe2 может также быть записана исходя из эвклидова кодового расстояния d и
среднеквадратической оценки шума - :
Pe 2 Q d / 2
где, используя нормализацию из раздела 2.4.3.1.1.
d = 2K
( KN0 ) /( 2 Ec )
CCSDS 000.0-G-0
Стр. 2-25
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Равносильно, число Ka чипов, необходимых для данного значения Pe2 с диаметрально
противоположными последовательностями, имеющими единство совпадающих по фазе
Ka
частичных (дробных) корреляций составляет
Q
1
Pe2 2 .
2 Ec N0
Число Ka чипов, необходимых для данного Pe2 с диаметрально противоположными
последовательностями, имеющими единство совпадающих по фазе частичных корреляций,
очень мягко зависит от величины Pe2 для любого указанного значения отношения сигнал-шум
чипа, как это показано в [2].
Применение соображения представленного в разделе 2.4.3.1.2, показывает, что Pe2 5×10-5
соответствует вероятности успешного захвата дальномерной последовательности равной
приблизительно 0,999 (99,9 %), и Ka - приблизительно 30000 чипов для 2 EC / N 0 = -33 дБ; это
есть приблизительный показатель, который мы будем использовать в наших примерах в
следующих разделах
Для произвольной зондирующей последовательности, вероятность ошибки Pe2 распознавания
между совпадающим по фазе циклическим сдвигом и одним из его несовпадающих по фазе
циклическим сдвигом есть функция совпадающей по фазе частичной корреляции и
несовпадающей по фазе частичной корреляция . Сигнально-пространственное
представление для этой ситуации показано на Рисунке 11. Совпадающий по фазе
циклический сдвиг и несовпадающий по фазе циклический сдвиг зондирующей
последовательности соответствуют точкам C и E, соответственно, на круге радиуса K
(K суть число коррелированных чипов).
K
E
d
B
D
A
K
K( +)/2
C
K
Рисунок 11 Сигнально-пространственное представление для распознавания
между совпадающим по фазе циклическим сдвигом и одним из его
несовпадающих по фазе циклических сдвигов произвольной зондирующей
последовательности длиной K чипов, имеющих совпадающую по фазе
частичную корреляцию и несовпадающую по фазе частичную корреляцию .
CCSDS 000.0-G-0
Стр. 2-26
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Применяя простые геометрические представления к подобным треугольникам ABC и BCD,
находим, что квадрат эвклидова кодового расстояния d2 между сигналами в точках C и E
будет:
d 2 4 K 2 2
с
.
2
Параметр - масштабный коэффициент корреляции для зондирующей последовательности.
Отметим что, для выбора между прямо противоположными последовательностями, =
так, чтобы = 1. Для решения между ортогональными последовательностями, = 0 так,
чтобы = 1/2.
Используя приведенные выше выражения и нижеследующий подход, который использовался
выше для прямо противоположных сигналов, показано, что число K чипов, необходимых для
данного Pe2 и любого заданного значения отношения сигнал-шум чипа, тогда имеем:
Q
K
1
Pe 2 2
1
2 Ec N 0 2
Это побуждает к определению нормализованного времени корреляции (cor) произвольной
зондирующей последовательности с параметрами и как отношение между K для
произвольной
зондирующей
последовательности
и Ka
для
противоположной
последовательности с единством совпадающих по фазе частичных корреляций как
cor K / K a 1 /( 2 )
Наконец принимая методику захвата, основанную на поиске максимума и отдельном
корреляторе для каждой зондирующей последовательности, мы можем определить
нормализованное время захвата acq-Li зондирующей последовательности Ci как
acq-Li = Li cor
где Li - длина зондирующей последовательности или, равносильно, количество
несовпадающих циклических сдвигов такой последовательности. Находить нормализованное
полное время захвата acq-tot, то есть, нормализованное время, требуемое для захвата фазы
всей дальномерной последовательности, мы предполагаем, что все шесть зондирующих
последовательностей системы последовательностей измерения дальности коррелированных
параллельно в течение процесса синхронизации, для которого требуется шесть корреляторов.
В этом случае acq-tot есть непосредственно максимум нормализованных времен захвата acq-Li
шести зондирующих последовательностей, а именно, C6, так, чтобы
acq-tot = acq-23
Для того чтобы преобразовывать значения нормализованных времен (cor , acq-Li и acq-tot) во
времена, измеренные в чипах зондирующей последовательности, мы только должны
умножить их на количество чипов Ka необходимых, чтобы получить желаемое значение Pe2
при
заданном
отношении
сигнал-шум
чипа
для
прямо
противоположных
последовательностей с единством совпадающих по фазе частичных корреляцией.
CCSDS 000.0-G-0
Стр. 2-27
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
В ТаблицеТаблица 2–5 (для v=2 балансной дальномерной PN последовательности Таусворта
с взвешенной оценкой), а в ТаблицеТаблица 2–6 (для v=4 балансной дальномерной PN
последовательности Таусворта с взвешенной оценкой) дано нормализованное время
корреляции cor, вместе с временем корреляии в чипах (равное 30000 cor) требуемое, что бы
достичь парную вероятность ошибки Pe2 = 510-5 при отношении сигнал-шум на чип 2EC /N0
равному 33 дБ.
Зондирующая
последовательность
cor
Время
корреляции
(чипы)
C1 (тактовая
частота
дальности)
0,6274
0,6274
1
2,54
76 200
C2
0,2447
0,0410
0,5838
28,61
858 300
-C3
0,2481
0,0247
0,5498
29,55
886 500
-C4
0,2490
0,0177
0,5355
30,12
903 600
C5
0,2492
0,0139
0,5279
30,50
915 000
-C6
0,2496
0,0113
0,5226
30,71
921 300
Таблица 2–5. v=2 балансная дальномерная PN последовательность Таусворта с взвешенной
оценкой – синфазная парциальная корреляция , противофазная парциальная корреляция ,
масштабный коэффициент корреляции и нормализованное время корреляции cor, вместе
со временем корреляции в чипах требуемом, чтобы достичь парную вероятность ошибки
Pe2 = 510-5 на чип при отношении сигнал-шум чипа 2EC /N0 33 дБ.
Зондирующая
последовательность
cor
Время
корреляции
(чипы)
C1 (range clock)
0,9387
0,9387
1
1,13
33 900
C2
0,0613
0,0103
0,5840
455,7
13 671 000
-C3
0,0613
0,0061
0,5498
484,0
14 520 000
-C4
0,0613
0,0044
0,5359
496,6
14 898 000
C5
0,0613
0,0034
0,5277
504,3
15 129 000
-C6
0,0613
0,0028
0,5228
509,0
15 270 000
Таблица 2–6. v=4 балансная дальномерная PN последовательность Таусворта с взвешенной
оценкой – синфазная парциальная корреляция , противофазная парциальная корреляция ,
масштабный коэффициент корреляции и нормализованное время корреляции cor,
вместе со временем корреляции в чипах требуемом, чтобы достичь парной вероятности
ошибки Pe2 = 510-5 на чип при отношении сигнал-шум чипа 2EC /N0 33 дБ.
CCSDS 000.0-G-0
Стр. 2-28
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Применяя предыдущие уравнения мы находим, что полное время захвата в чипах будет
такой, как показано в следующей Таблице 2–7. В Таблице также указано время захвата в
секундах, при этом скорость передачи чипов принята 2 Мчип/с (тактовая частота дальности
fRC 1 МГц и длительность чипа TC - 0,5 мкс)
Последовательность
acq-tot = acq-23 = 23 cor
Tacq (в чипах)
23 30,71 =
30 000 706,3 =
706,3
21 189 900
23 509,0 =
30 000 11 707 =
Tacq (с)
T2B
10,59
T4B
175,6
11 707
351 210 000
Таблица 2–7. Нормализованное время захвата (acq-tot) и время захвата (Tacq)в чипах и
секундах, полагая fRC=1 МГц, вероятность ошибки Pe2 = 510-5 и отношение
сигнал-шум на чип 2EC /N0 of -33 dB.
Интересно заметить, что мы можем найти общее выражение для времени захвата на борту КА
(TACQ_S/C = TACQ) это:
TACQ _ S / C
Q
1
Q
1
Pe 2 2 23
P 1
2 r
N 0 FC
Pe 2 2
2
Q 1 Pe 2
1
1
K a acq _ tot
acq _ 23
FC
2 Ec N 0
FC
Pr
N0
23
corr
1
FC
2
Q
1
Pe 2 2
P
2 r
N0
23
1
2
1
2
где corr , и относятся к C6 (L6 = 23).
Из этого можно видеть что:
-
Если время захвата задается как функция превышения мощности сигнала дальности
над спектральной плотностью шума (PR/N0 в дБГц), то зависимость от скорости
передачи чипов исчезает
-
Если PR/N0 снижается на 3 дБ (т.е. с 27 до 24 дЬГц), время захвата увеличивается в 2
раза, если PR/N0 увеличивается на 10 дБ (т.е. с 27 до 37 дБГц), время захвата
уменьшается в 10 раз. Таким образом, значения из Таблица 2–7 (полученные для 27
дБГц) для PR/N0 = 30 дБГц становятся соответственно 5,29 с (для T2B) и 87,8 с (для
T4B). Также показано, что изменение времени захвата, подчиняется показательному
закону
10 (Pr/No-30)/10.
CCSDS 000.0-G-0
Стр. 2-29
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
2.4.3.1.1 Нормализация и определения отношения сигнал-шум
На выходе фазового демодулятора принятый сигнал дальномерной последовательности
может быть записан как:
PR s(t ) n(t )
где
s(t ) s k для (k 1)TC t kTC
есть бинарная (1) форма сигнала дальномерной последовательности со значениями чипа
sk {+1, –1}, TC - длительность чипа, PR – момщность принятого дальномерного сигнала, а
n(t) есть белый Гауссовский шум с нулевым средним и автокорреляционной функцией
R ( )
N0
( )
2
На выходе согласованного фильтра за время t = kTC для прямоугольной формы чипа имеем
1
TC
Разделив на
PR
,
PR s (t ) n(t ) dt PR sk 1
( k 1)TC
TC
kTC
kTC
(k 1)TC
n(t )dt
легко получим нормализованный сигнал на выходе согласованного фильтра
rk sk nk
где
nk
1
PR TC
kTC
( k 1)TC
n(t )dt
Интеграл nk - Гауссовская случайная переменная с нулевым средним.
Так как
kTC
kTC
kTC
kTC
E
n(t1 )dt1
n(t2 )dt2
En(t1 )n(t2 )dt1dt2
( k 1)TC
( k 1)TC
( k 1)TC ( k 1)TC
kTC
( k 1)TC
CCSDS 000.0-G-0
kTC
( k 1)TC
kTC
N0
N0
N
(t1 t 2 ) dt1dt 2
dt 2 0 TC
( k 1)TC 2
2
2
Стр. 2-30
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
где E [.] обозначает оператор ожидания, n k который также является нулевой средней
Гауссовской случайной переменной с дисперсией:
2
1 N0
N0
N
T
0
P T 2 C 2 PRTC 2 EC
R C
где
EC PRTC
- энергия чипа потому что
sk
2
1,
это следует из того, что отношение сигнал-шум
чипа
2 PRTC 2 EC
N0
N0
Так как основополагающая тактовая частота дальности есть
SNR chip
f RC
1
2TC
Отношение сигнал-шум чипа может быть записано как
SNR chip
PR 1
N 0 f RC
2.4.3.1.2 Вероятность захвата
Зондирующая последовательность Ci будет правильно захвачена (синхронизирована), если и
только если её совпадающий по фазе циклический сдвиг выиграл бы попарное сравнение с
каждым из Li-1 несовпадающих по фазе циклических сдвигов зондирующей
последовательности.
Вероятность
ошибки
PeLi
захвата
этой
зондирующей
последовательности, таким образом, может быть очень хорошо аппроксимирована как:
PeLi (Li-1)Pe2
когда Pe2 является малым, правая часть этого уравнения, которая всегда является строго
верхней границей PeLi и также является хорошей аппроксимацией PeLi, поскольку события,
когда совпадающий по фазе циклический сдвиг выигрывает, индивидуальные попарные
соревнования, являются существенно независимыми так, что:
1 - PeLi = (1 - Pe2) Li-1 1 - (Li-1)Pe2
Из вышеприведенного уравнения видим, что зондирующая последовательность C6 имеет
самую большую вероятность ошибки захвата, но время ее захвата, более чем на 20 %
продолжительнее чем других зондирующих последовательностей, что все шесть
зондирующих последовательностей коррелированы параллельно и что время корреляции
одно, определяемое C6. Из этого мы можем заключить, что вероятности ошибок захвата
других пяти зондирующих последовательностей должны быть значительно меньшими.
Из этого следует, что, если мы коррелируем все шесть зондирующих последовательностей
параллельно за время корреляции необходимое для зондирующей последовательности C6,
CCSDS 000.0-G-0
Стр. 2-31
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
тогда мы можем пренебречь вероятностью ошибочного захвата других пяти зондирующих
последовательностей и заключить что
PACQ 1 - Pe23 0,999
которая и есть наша целевая вероятность успешного захвата. Из этого мы имеем
Pe23 1,110-3. Так как время интеграции для C6 также используется для других
последовательностей, PeLi будет уменьшаться прогрессивно от C5 к C1.
2.4.3.2
Точный анализ
Более точный анализ параметров захвата на борту основанный на том же самом подходе,
применен в разделе Error! Reference source not found. для случая наземной станции.
L 1
где P (Ci) -
i
2
1
1
P(Ci ) 1 erfc( y )
exp y dy
2
вероятность правильного решения относительно каждого кода Ci и
6
PACQ C P(Ci )
i 1
erfc( x) 1 erf ( x)
erf ( x)
2
x
e
t 2
dt
0
Однако, для бортовой смешанной последовательно/параллельной структуры, после того, как
каждая зондирующая последовательность Ci захвачена, используя последовательный
алгоритм, шумовые компоненты для других Li корреляций могут быть приняты
статистически независимыми4. Поэтому, в этом случае
2
N0
TCOR
2
и
2
2
i 0 i1 E c TCOR i 0 i1 PR
TCOR
L
L
N 0 Tc
N0
где ρ*ik нормализованные коэффициенты корреляции, определенные в разделе Error!
Reference source not found..
Заметим, что для бортового приемника время корреляции для кода, Ci есть TCOR,i = TACQ/Li,
после того, как фаза Li, последовательно обработана во временном интервале TACQ. Для
примера, время корреляции, примененное для кода, C2 составляет 23/7 времени корреляции
кода C6 и как следствие P(C2) >> P(C6). Таким образом, мы можем сделать заключение, что
для бортовой схемы синхронизации (захвата) PACQ P(C6), и TACQ = 23×TCOR6. Необходимое
время корреляции TCOR6 для вероятности успешного захвата PACQ равной 99,9 %, полученное
путем инвертирования второго уравнения этого раздела, но практически те же самые
4
В этом причина того, почему упрощенный и точный анализ обеспечивают сходные результаты для бортового
применения, когда для каждой зондирующей последовательности Ci. используется последовательный алгоритм
CCSDS 000.0-G-0
Стр. 2-32
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
результаты, получаются инвертированием первого с i = 6 (относительная погрешность для
величины PACQ менее чем 0,3 %).
2.4.3.3
Упрощённые версии точного анализа
Теоретические значения времени захвата, приведенные в Синей книге, были получены,
используя выражения и процедуру, описанные в Разделе2.4.3.2
Однако, следуя упрощенному подходу Error! Reference source not found. и отмечая что
значения из Таблицы Таблица 2–7 относятся к 2Ec/N0 = -33 дБ или PR/N0 = 27дБ
время захвата при 30 дБГц составляет половину времени захвата при 27 дБГц,
находим 87,8 с для T4B и 5,3 с для T2B. Это соответствует ошибке приблизительно 2 % по
сравнению с точными результатами анализа. Необходимо подчеркнуть, что упрощенный
анализ, с теоретической точки зрения, правильный5, но из-за некоторых приближений в
вычислениях мы имеем такое небольшое расхождение в окончательном результате. Однако
это очень полезно, так как дает возможность найти, окончательное подобное выражение для
времени захвата, показывая коллизию ожидаемого отношения С/Ш и коэффициентов кода ξ
и ψ.
2.4.4 БОРТОВЫЕ АППАРАТНЫЕ СРЕДСТВА ПРИМЕНЕНИЕ И ОГРАНИЧЕНИЯ
Теоретические оценки, приведенные в разделах 2.4.2 и Error! Reference source not found.,
основаны на ряде предположений, изложенных в разделе 2.4.1 в частности:
На выходе согласованного фильтра квантование не производится.
Выделение кода осуществляется с использованием алгоритма поиска максимума.
Чтобы ограничивать сложность цифрового процессора обработки сигналов, число битов для
представления сигнала на выходе согласованного фильтра должно быть должным образом
ограничено. Жесткое квантование (только 1 бит) минимизирует число логических схем
(вентилей), но приводит к дополнительным потерям при выполнении операции захвата. 3-х
битовое квантование представляет хороший компромисс с точки зрения рабочих
характеристик и сложности.
Алгоритм, основанный на поиске максимума, представляет собой оптимальный подход (с
точки зрения характеристик захвата) для захвата PN сигнала. Однако в этом алгоритме
обнаруживается ограничение: так в отсутствии полезного входного сигнала (т.е. только шум),
он будет находить максимум.
Вообще, выделение кода осуществляется после того, как схема отслеживания чипа CTL
выдаст состояние захвата, но ложный захват CTL может произвести к ложному захвату PN
кода. Чтобы минимизировать вероятность этого ложного захвата, мы можем применить один
из следующих методов (для каждой из последовательностей Ci):
5
Это не является верным для характеристик захвата наземной станции, где применяется приемник с полностью
параллельной схемой.
CCSDS 000.0-G-0
Стр. 2-33
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
(1) Метод, основанный на подтверждении захвата – могут быть предложены различные
решения, например:
Подтверждать захват кода PN, сравнивая выбранное максимальное значение с
предварительно заданным порогом (включая нормализацию С+Ш, используя
специальную АРУ для сигнала дальности),
Подтверждать захват кода PN, проверяя различие (по амплитуде) между
выбранным значением максимума и другими Li-1 значениями: захват
подтверждается, если различие больше чем предварительно заданный порог,
Вхождение в режим слежения и проведение непрерывной проверки, если фаза
захваченного кода соответствует максимуму для каждой Ci; захват PN кода можно
считать достигнут после некоторых подтверждений, например, n успешных из k
прослеживаний.
(2) Метод, основанный на применении специальной процедуры связи
Подавать модуляцию сигналами дальности в радиолинию «земля-борт» до
включения на борту режима измерения дальности. В этом случае дальномерный
процессор никогда не обрабатывает одни шумы.
Для первого метода процесс вхождения в связь (захвата) практически можно считать
законченным, когда достигнуто подтверждение; и только после этого функция ретрансляции
в модуляторе радиолинии «борт-земля» с применением восстановленного PN сигнал
дальности может быть разрешена.
Вспомогательный метод мог бы состоять в том, чтобы заменить алгоритм поиска максимума
сравнением с фиксированным порогом. Конечно, чтобы оптимизировать характеристики по
отношению к различным уровням входного сигнала, используется нормализация S+N,
требующая специального АРУ сигнала дальности. Однако, в обычном случае, где
совпадающий по фазе циклический сдвиг ортогонален (или почти ортогонален как на
Рисунке Рисунок 12) к несовпадающему по фазе циклическому сдвигу, квадрат длины линии
CB сегмента составляет два квадрата (или почти так) длины линии CD сегмента. Это
означает, что приходиться расплачиваться приблизительно 3 децибелами необходимого
отношения сигнал-шум, чтобы достичь заданной характеристики, когда при использовании
фиксированного порога как лучшего правила распознания вместо оптимального правила
распознания (то есть поиск максимума). Заметьте что только для диаметрально
противоположных сигналов (то есть: компоненты тактовой частоты) нет никаких потерь, при
использовании лучшего фиксировано-порогового правила распознания.
CCSDS 000.0-G-0
Стр. 2-34
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
K
E
d
(i)
принятая
r Mдоля
B
A
D
K
C
K
K ( + ) /2
Граница для
оптимального решения
Граница решений для
фиксированного порога
Рисунок 12 - Пространственное представление для зондирующей последовательности Ci и
границ решений
Граница оптимального решения = поиск максимума
Заметьте, что в случае решения с фиксированным порогом, порог должен быть определен,
рассматривая вероятность как правильного, так и ложного захвата (для несовпадающей по
фазе корреляции).
Сравнение с точки зрения потерь в децибеле для одинаковой вероятности захвата (PACQ
=PACQ_equiv = 99,9 %) между процедурами захвата с поиском максимума и пороговым
захватом показано в Таблице 2-8. Потери для трёх случаев порогового сравнения
определены как необходимые дополнительные децибелы относительно PR/N0 = 27 дБГц, для
того, чтобы иметь максимальное время захвата, полученное с помощью Порогового
Сравнения, равное времени захвата, полученному Поиском Максимума (см. [25].)
CCSDS 000.0-G-0
Стр. 2-35
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Поиск
Максимума
T2
B
Время захвата
(с)
Пороговое Сравнение
Идеальная
обработка с
3-битным
квантованием
Идеальная
обработка с
1-битным
квантованием
21,5
22,9
33,8
3,1
3,4
5,1
358,2
381,0
562,7
3,1
3,4
5,1
Идеальная
обработка
без квантования
Идеальная
обработка
без
квантования
10,6
Потери (дБ)
T4
B
Время захвата
(с)
175,6
Потери (дБ)
Таблица 2–8. Процедуры захвата с Поиском Максимума и путём Порогового Сравнения
Очевидно, что при 1-битовом квантовании эффект уменьшения потерь составляет
приблизительно 2 децибела, по сравнению со случаем без квантования, в то время как 3битовое мягкое квантование уменьшает эти потери только на 0,3 децибела
2.5
ФЛЮКТУАЦИИ ОТСЛЕЖИВАНИЯ PN КОДА НА БОРТУ
2.5.1 СЛУЧАЙ ПРЯМОУГОЛЬНО-ПРЯМОУОЛЬНОГО СОВМЕЩЕНИЯ
PN код измерения дальности напоминает прямоугольные колебания (меандр) с некоторыми
"ошибками". Поэтому схема отслеживания чипов (CTL) может быть легко реализована путем,
видоизменения схемы отслеживания информационных переходов (DTTL) как изображено на
РисункеРисунок 13. Ошибка, прошедшая фильтр схемы отслеживания добавляется к
номинальной частоте передачи чипов и, в конечном счете, используется, чтобы управлять
частотой генератора с цифровым управлением (ГЦУ). Следует отметить, что сигнал тактовой
частоты дальности когерентно связан с передаваемой несущей частотой; поэтому для
получения правильной синхронизации CTL возможно применение полуавтоматической
схемы захвата. При таком способе чиповоя скорость получается путем добавления
номинальной чиповой скорости к сигналу ошибки схемы синхронизации несущей (ФАП) с
коэффициентом равным отношению частоты передачи чипов к частоте несущей радиолинии
«земля-борт». Это второе условие дает возможность проводить оценку Доплеровского
смещения частоты на дальномерном сигнале и позволяет улучшить характеристики захвата
CTL вследствие того, что ретранслирована должна быть только фаза чипа (не частота).
Частота на выходе ГЦУ схемы отслеживания чипов (CTL) используется, для запуска
сдвиговых регистров, которые формируют шесть компонент кода в блоках формирователей
кода.
Сигнал на входе CTL получается из канала квадратур несущей, и это может быть выражено
как:
CCSDS 000.0-G-0
Стр. 2-36
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
a
r i r it s A
k
pit s kT N i
k
где:
ts – интервал дискретизации;
A – амплитуда чипа;
T = Tc – период чипа;
Ni – нулевое среднее белого Гауссовского шума с дисперсией выборки:
i2
N0
2t s
– является случайным периодом, который будет оценен;
p(ti) – функция прямоугольной формы имеющая значения 1 для 0tiT и значение 0 в
остальной области, т.е.:
it
p it s rect s
T
ak представляет полярность чипа kth.
CTL Детектор
+/-1
r (i)
УСРЕДНЯЮЩИЙ
ФАЗОВЫЙ
ИНТЕГРАТОР
ЛОГИЧ. СХЕМА
СИНХРОНИЗ.
Q (k)
L
ФИЛЬТР
ПЕТЛИ
ГЦУ
Номинальная
чиповая скорость
N
Ошибка ФАПа
по несущей
Компоненты кода
Тактовая частота
Рисунок 13 - Блок-схема петли ФАП отслеживания чипов (CTL)
Таким образом, мы рассматриваем, на входе CTL, сформированный сигнал прямоугольной
формы; усредняющий фазовый интегратор (основанный на методе Интегрирования и вывода
данных) представляющий решение, согласованное с сигналом для оценки фазовой ошибки.
Предположим, что входные символы имеют свой передний фронт … kT , k 1T , …, и что
петля формирует свой передний фронт… kT ˆ, k 1T ˆ, тогда ошибка синхронизации :
CCSDS 000.0-G-0
Стр. 2-37
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
ˆ
Теперь мы определим характеристику схемы слежения CTL исходя из флюктуаций
импульсов синхронизации, а именно 2 .
Используя линейную теорию, 2 может быть получена, как только будут
следующие два параметра:
определены
1. S-кривая петли;
2. двухсторонняя спектральная плотность эквивалентного аддитивного шума.
S-кривая определяется как средняя величина ошибки сигнала управления, обусловленная
ошибкой синхронизации. Математически, мы имеем:
S L EQk
где E() обозначает статистическое ожидание, Qk = Q (k) – выход квадратурного канала (см.
Рисунок 13), а L представляет длину накопления интегрирования со сбросом после перехода
квадратуры CTL. На выходе фазового интегратора с осреднением имеем (см. Рисунок 14):
Qk
r i Aa
iCk
k
pit s kT N i
iCk
где:
1
1
Ck i : k T ˆ it s k T ˆ
2
2
Сигнал с выхода фазового интегратора с осреднением умножается на 1, чтобы обеспечивать
правильную коррекцию в петле. Некоторым образом умножение на 1 заменяет детектор
переходов, предполагая, что PN последовательность похожа на прямоугольную. Среднее
значение сигнала на выходе фазового интегратора с осреднением после умножения на +1/-1
легко найти:
E Qk 2 A
ts
S 2 AL
ts
Укажем, что полученные соотношения для S-кривой имеют смысл, когда схема находится в
режиме слежения. Кроме того, из-за дискретной природы накопления, всегда квантуется
кратно целому числу периодов выборок ts; однако, присутствие шума делает эффект
квантования пренебрежимо малым, если число выборок в чипе достаточно высоко. Наклон
S-кривой является представлением о коэффициенте передачи детектора схемы K:.
CCSDS 000.0-G-0
Стр. 2-38
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
K
S
2 AL
0
ts
Чтобы оценить эквивалентный аддитивный шум петли, предположим, что CTL находится в
режиме слежения (0). Согласно этому предположению дисперсия на выходе фазового
детектора:
N2 L Var Qk L
N0
2t s
T
t
s
N T
L 0
2t s2
Флюктуация импульсов синхронизации петли 2 может быть оценена, используя
линеаризованную модель CTL. В соответствии с этим подходом, ошибка петли на выходе
фазового детектора может быть записана как:
K N
Амплитуда
Здесь N аддитивный Гауссовский шум. Вышеупомянутое соотношение приводит к
эквивалентной линеаризованной петле, представленной на Рисунке 15.
Окно интеграции фазы с осреднением
1
k T ˆ
2
1
k T
2
Время
1
k T
2
1
k T ˆ
2
ts
CCSDS 000.0-G-0
Стр. 2-39
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Рисунок 14 - Интеграция фазы с осреднением
N /K
+
+
-
+
K
ˆ
Фильтр
петли
ФАП
ГЦУ
Рисунок 15 Модель линеаризованной петли ФАП (ошибка синхронизации, представлена как
ошибка тактирования)
Используя линеаризованную модель, можно написать:
2
SN
2BL
2
K 2
где BL – односторонняя ширина полосы петли ФАП, а SN = спектральная плотность
аддитивного шума в петле, которая:
SN
N T2
N2 L T L2 0 2
2
2t s
и
2
2 N 0T 2
L
2t s2
2 B L
2 AL
t
s
2
из которого:
1 BL T 2
4 PR N 0
2
где
PR
1 E
c есть отношение мощности сигнала дальности к спектральной плотности
N0 T N0
шума, притом, что Ec/N0 эквивалентно A2T (т.е., PR=A2).
CCSDS 000.0-G-0
Стр. 2-40
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
В приведенном выше вычислении мы приняли всю мощность дальномерного сигнала как
полезную мощность для петли ФАП отслеживания чипов, но в действительности, из-за
действия фильтрации CTL, для отслеживания чиповой скорости используется только
компонента тактовой частоты.
Так, заменяя мощность дальности PR мощностью, связанной с компонентой тактовой частоты
PRC и полагая, что частота компоненты тактовой синхронизации дальности fRC является
половиной значения чиповой скорости (FC =1/Tc=2fRC), имеем:
BL N o
1
[с]
4 f RC
P RC
И, наконец, односторонняя флюктуация дальности может быть написана как:
c
2
Range_ CTL _ sq _ sq
c
8 f RC
BL
PRC N 0
[м]
при этом c - скорость света.
2.5.2 СЛУЧАЙ СИНУСОИДАЛЬНО-ПРЯМОУГОЛЬНОГО СОВМЕЩЕНИЯ
Необходимо подчеркнуть, что в основу анализа, приведенного выше, положено
формирование сигнала прямоугольной формы и согласованный приемник; в большинстве
встречающихся каналов (в особенности для аналоговых внешних интерфейсов передачи и
приема) реализуется операция фильтрации, удаляющая компоненты кода более высокого
порядка (в том числе и тактовый сигнал дальности). Например, принимая чиповую скорость 3
Мчип/с и ширину полосы приемника по промежуточной частоте 6 МГц, имеем, что все
спектральные компоненты тактовой частоты с порядком выше, чем 1 сильно подвержены
фильтрующему воздействию. В худшем случае мы можем полагать, что, из-за такой
фильтрации, дальномерная последовательность имеет вид синусоиды, сформированной на
входе CTL. Заметьте, что в этом случае, выделяя только основную составляющую тактовой
частоты, мы должны рассмотреть дополнительные потери мощности и снижение отношения
С/Ш на входе демодулятора (обусловленные ВЧ-трактом). Например, каждый должен
помнить, что 81 % полной мощности прямоугольного сигнала связаны с основной или первой
составляющей.
Однако в дальнейшем мы рассматриваем сформированный сигнал дальности в виде
идеальной синусоиды, (пренебрегая потерями, возникающими из-за фильтрации в канале), и
сосредотачиваем внимание на характеристиках CTL.
В этом случае выражение для S-кривой представленное выше (см. Раздел Error! Reference
source not found.) больше не действительно.
Чтобы оценить это, принимаем во внимание, как изображено на РисункеРисунок 14, два
последовательных чипа различной полярности, сформированы в
виде синусоиды с
CCSDS 000.0-G-0
Стр. 2-41
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
амплитудой 2 A : это соответствует сигналу синусоидальной тактовой частоты мощностью
A2,. Здесь мы опять принимаем ошибку синхронизации (прямоугольной формы,
сформированной фазовым интегратором с осреднением) равной :
( N / 2) K
ts
cos 2 n T 2
2A
2A
K
ts
где = Kts и T = Nts. Приведенное выше приближение действительно в режиме слежения в
случае малых ошибок . Поэтому:
E Qk 2 2 A
ts
S 2 2 AL
ts
K
S
2 AL
2
0
ts
Полагая, что для выражения шума, мы имеем те же самые уравнения случая прямоугольного
согласования и применяя то же самое рассмотрение для мощности тактовой частоты
дальности, мы находим:
1 1
BL N o
P RC
2 4 f RC
(с)
Окончательно, разброс однопутевой дальности может быть записан как:
c
2
Range_ CTL _ sin_ sq
2.5.3
1
c
2 8 f RC
BL
PRC N 0
[м]
СРАВНЕНИЕ ХАРАКТЕРИСТИК СИНУСОИДАЛЬНОГО И
ПРЯМОУГОЛЬНОГО ФОРМИРОВАНИЯ
Как описано и установлено в Разделе Error! Reference source not found. характеристики
петли ФАП отслеживания чипов (CTL), выраженные во временных единицах, флюктуации
сопровождения _ sq _ sq есть:
_ sq _ sq
1
BL N o
4 f RC
P RC
[с]
где:
fRC - частота тактовой синхронизации дальности (половина величины чиповой
скорости), (Гц)
PRC - мощность синхронизирующей компоненты дальности (в данном случае
CCSDS 000.0-G-0
Стр. 2-42
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
прямоугольной формы) на входе CTL (Вт)
N0 – односторонняя спектральная плотность мощности шума (Вт/Гц) на входе CTL
BL - односторонняя ширина шумовой полосы ФАП CTL (Гц).
Это выражение относится к сигналу прямоугольной формы и согласованному приемнику
(интегрирующе-подавляюшая фильтрация с формированием прямоугольного сигнала для
усредняющего фазового интегратора) при следующих условиях:
Идеальная схема отслеживания чипов
Отсутствие влияния дискретизация по времени (количество выборок на чип)
Мягкое квантование фильтра обнаружения чипа (согласованный фильтр)
Отсутствие помехового влияния со стороны режима телекоманд.
Для СКО однопутевого измерения дальности имеем:
Range_ CTL _ sq _ sq
BL
PRC N 0
c
8 f RC
[м]
где c – скорость света (м/с).
В случае формирования дальномерной последовательности синусоидальной формы (см.
Раздел 2.5.2) и принимая те же самые идеальные перечисленные выше условия,
характеристики CTL (до сих пор реализованные с использованием усредняющего фазового
интегратора с формированием сигнала прямоугольной формы) становятся:
_ sin e _ sq
1 1
BL No
P RC
2 4 f RC
Range_ CTL _ sin e _ sq
1 c
2 8 f RC
[с]
BL
PRC N 0
[м]
где PRC мощность синусоидальной компоненты тактовой частоты на входе CTL.
Поэтому заметим, что существует следующее соотношение:
_ sin e _ sq
_ sq _ sq
2
Синусно-прямоугольное представление применимо в случае формирования синусоидального
сигнала передачи, но также может быть применено (как предельное условие) для ситуации,
когда на передачу сформированный сигнал прямоугольной формы сильно отфильтрован на
приемной стороне перед CTL. В последнем случае, в выражении принимается во внимание
только характеристики CTL и пренебрегается любыми потерями (в смысле ухудшения) из-за
фильтрации в канале. Действительно в упомянутых выше выражениях PRC/N0 представляет
превышение мощности тактовой частоты дальности (синусоида предполагается как
предельный случай) над спектральной плотностью шума на входе CTL.
Как получено в разделе 2.7.2.2, среднеквадратичная ошибка однопутевой дальности для
случая формирования сигнала синусоидальной формы с согласованным приемником:
1 c
BL
Range_ CTL _ sine _ sne
[м]
4 f RC PRC N 0
Применяя те же условия, которые указанны в Синей книге, следовательно, мы получаем:
CCSDS 000.0-G-0
Стр. 2-43
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
BL=1 Гц
Чиповая скорость Fc = 2,068 Мчип/с (fRC= Fc/2)
PR/N0 =30 дБГц
i. T4B: PRC N 0 PR N 0 20LOG10 1 29,45 дБГц
ii. T2B: PRC N 0 PR N 0 20LOG10 1 25,95 дБГц
и окончательно
Последовательность
Range _ CTL _ sine _ sine Range_ CTL _ sine _ sq Range_ CTL _ sq _ sq
T4B
0,78 м
0,87 м
1,22 м
T2B
1,17 м
1,29 м
1,82 м
Таблица 2–9. Характеристики разброса измерений дальности на наземной станции
Как подчеркивалось выше, выражения для бортовых флюктуаций слежения относятся к
теоретическим характеристикам CTL; по этой причине в Синей книге, кроме прочего,
определены потери на реализацию величиной 2 дБ. В счет этих потерь принимаются потери,
вызванные квантованием сигнала, несовершенством отслеживания несущей и демодуляции
сигнала.
Относительно эффектов квантования сигнала, можно рассматривать: квантование амплитуды
сигнала (в части количества битов), квантование во времени (то есть: конечное число
выборок в чипе) и асимметрию чипа.
Вообще, влияние амплитудного квантования и асимметрии чипа можно считать
незначительными. Другое дело - ситуация с временным квантованием. Принимая во
внимание, что частота выборок равна FS , тогда эта часть потерь ( Q ) может быть оценена
как:
Q
1
1
12 FS
(с)
Например, если FS = 20 МГц мы имеем среднеквадратическую ошибку 14 нс (2,1 м для
однопутевой дальности.), это больше чем теоретическая величина, связанная с тепловыми
помехами при PR/N0=30 дБГц и BL=1 Гц.
Что касается доли потерь за счет временного квантования, заметим, что:
- она постоянна и не зависит от отношения сигнал-шум,
- при низком отношении С/Ш в петле ФАП она маскируется флюктуациями,
вызванными тепловыми шумами,
- как тепловые флюктуации, она может быть уменьшена за счет обработки с
осреднением в аппаратуре наземной станции.
Наконец, в Синей книге [1] в качестве ориентира определены теоретические характеристики
разбросов по дальности за счет борта для полосы петли ФАП CTL равной 1 Гц. В случае
реализации более широкой полосы частот петли6, теоретические величины флюктуаций
могут быть вычислены повторно, используя следующее выражение:
6
Технические требования для ширины полосы частот бортовой петли CTL зависят от задач полета.
CCSDS 000.0-G-0
Стр. 2-44
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
B 1Hz BL
L
Потери реализации менее чем 2 дБ должны быть отнесены к этим новым значениям
теоретических флюктуаций.
2.6
2.6.1
ВХОЖДЕНИЕ В СВЗЬ (СИНХРОНИЗМ) НА СТАНЦИИ
ВВЕДЕНИЕ
Теоретическое время захвата на борту и анализ, о котором сообщается в этом разделе,
основываются на идеальном линейном канале и применении при обработке на станции:
1. Полностью параллельного способа, основанного на 76 параллельных корреляторах
2. Алгоритма поиска максимума7
3. Идеальной демодуляции несущей (ухудшение за счет флюктуаций в петле ФАП
несущей не рассматривается)
4. Идеального отслеживания чипов (ухудшение за счет флюктуаций в петле
отслеживания чипов не рассматривается)
5. Отсутствие влияния амплитудной дискретизации сигнала на выходе фильтра
выделения чипов (согласованный фильтр)
6. Отсутствие влияния дискретизации по времени (количество выборок на чип)
Кроме того, ухудшение за счет влияния телеметрии в радиолинии «борт-земля» (хотя бы
незначительное) в данном анализе не рассматривают, об этом сообщается в разделе Error!
Reference source not found.
2.6.2
СТРУКТУРА ПРОЦЕССОРА ОБРАБОТКИ PN СИГНАЛА ДАЛЬОСТИ НА
НАЗЕМНОЙ СТАНЦИИ
Функционирование наземной станции PN измерений дальности осуществляется в два этапа:
сначала производится захват принятой компоненты тактовой синхронизации дальности и
как только это происходит, производится поиск начала кода дальности, захват и
отслеживание8.
Это показывает (см. бортовой анализ в разделе 2.4.4), что Поиск Максимума соответствует оптимальному
решению для приемника.
8
Для измерения сквозной задержки со сравнением переданного (р/л «земля-борт») и принятого (р/л «бортземля») периода кода.
7
CCSDS 000.0-G-0
Стр. 2-45
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Рисунок 16 Структурная схема станции для обработки принятого сигнала PN измерений дальности
(полностью параллельный метод)
Процесс синхронизации фазы кода может быть выполнен с помощью использования банка
корреляторов, которые выполняют параллельно все корреляции для каждого возможного
циклического сдвига каждой зондирующей последовательности (см. Рисунок 16). Таким
образом, общее количество требуемых корреляций составит i Li 77 .
На практике эти средства содержат в общей сложности 76 корреляторов, так как циклический
сдвиг тактовой частоты представляет собой инверсию самой себя, и поэтому необходим
только один коррелятор, чтобы подтвердить правильность фазы C1, как восстановленной
CTL. Как только синхронизация фазы кода закончена, можно оценить полную задержку из
предполагаемых фаз зондирующих последовательностей, используя китайскую теорему
остатка [12].
В этом полностью параллельном случае, время захвата дальномерной последовательности
TACQ_G/S (G/S = наземная станция), просто равняется самому продолжительному времени
(среди различных зондирующих последовательностей), чтобы выполнить корреляцию с
заданной вероятностью ошибки.
2.6.3 ОЦЕНКА ФУНКЦИОНИРОВАНИЯ
2.6.3.1
Упрощенный анализ
Делая ссылку на полный параллельный метод, описанный в Разделе 2.6.2 и применяя
результаты упрощенного анализа для оценки бортовых характеристик захвата Раздел Error!
Reference source not found., можно написать (см. [2] и [9]):
CCSDS 000.0-G-0
Стр. 2-46
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
T ACQ _ G / S
Q 1 (P ) 2
1
e2
= MAX i
P
ξ ψi
2 r
ξi i
N0
2
Этот законченный вид выражения представляет только приблизительное соответствие
времени захвата для станции9. В частности, для вывода этого выражения, шумовые
составляющие на выходе коррелятора приняты статистически независимыми (среди
различных корреляторов полностью параллельной схемы). Это не верно.
Упомянутое выше уравнение показывает, что TACQ_G/S короче, чем TACQ_S/C в L6 раз для того же
самого PR/N0.
Принимая выходы корреляторов как статистически независимые для этой параллельной
методики захвата, вероятность успешного захвата может быть аппроксимирована как
PACQ ≈1-22∙Pe2.
2.6.3.2
Точный анализ
Как показано в Разделе 2.6.2, процесс захвата состоит в обнаружении правильной фазы
зондирующей последовательностей Ci, путем корреляции принятого сигнала r (t)
(комбинация PN дальномерного сигнала S (t) плюс шум n (t)) с локальной моделью каждой
зондирующей последовательности Ci и всех её циклических сдвигов. Корреляция χik для
времени TCOR и k-го сдвига кода Ci может быть записана как:
ik =
TCOR
TCOR
TCOR
r (t ) C (t kT )dt S (t ) C (t kT )dt n(t ) C (t kT )dt
i
c
i
0
c
0
i
c
ik
ik
0
Сдвиг на k чипов (k = 0, 1, 2, …, Li-1), который дает самое наибольшее значение корреляции
χik, выбирается как совпадающим по фазе с принятой последовательностью. В то время как ηik
- просто шумовая составляющая на выходе коррелятора, компонента ρik представляет
величину корреляции принятой PN последовательности S (t) с единичной амплитудой и
вариантом сдвига Ci после времени корреляции TCOR. Принимая мощность дальномерного
сигнала PR = Ec/Tc, коэффициенты ρik могут быть вычислены как
ik
Ec
Tc
TCOR
s(t ) C (t kT )dt
i
c
0
EcTc ik*
TCOR
Tr
где:
9
Ec
s(t ) и s(t ) s k for (k 1)TC t kTC - бинарный (1) дальномерный
Tc
-
S (t )
-
сигнал прямоугольной формы со значеним чипа sk {+1, –1}.
TC - длительность чипа
. Анализ позади этого выражения обеспечивает хорошую оценку действий для бортового смешанного
параллельного - последовательного подхода.
CCSDS 000.0-G-0
Стр. 2-47
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
-
Tr = LTc - длина одной последовательности
ρ*ik - нормализованный коэффициент корреляции (т.е., единичная амплитуда и время
корреляции равное одно длине последовательности Tr = LTc).
Как показано в Таблице Таблица 2–10, нормализованные коэффициенты корреляции связаны
с совпадающим по фазе () и несовпадающим по фазе ( ) коэффициентами частичной
корреляции, как определено в Разделе Error! Reference source not found.
ρ*10=L1
T2B
T4B
633306
947566
ρ*40=L4
T2B
T4B
251332
61904
ρ*11=L1
ρ*20=L2
- 633306
- 947566
247020
61904
ρ*4k=L4
k = 1..14
- 17852
- 4400
ρ*50=L5
251604
61904
ρ*2k=L2
(k =1..6)
- 41404
- 10368
ρ*5k L5
(k =1..18)
- 14056
- 3456
ρ*30=L3
250404
61904
ρ*6=L6
251940
61904
ρ*3k=L3
( k=1..10)
- 24900
- 6160
ρ*6k =L6
(k = 1..22)
- 11388
- 2800
Таблица 2–10. Нормализованные коэффициенты корреляции (Единичная амплитуда и время
корреляции равное длине одной последовательности Tr)
Для кода C1, предполагая, что k = 0 соответствует правильной фазе, вероятность правильного
выбора есть просто: 10
* TCOR
EcTc
1
P(C1 ) P( 10 0) P( 10 10 0) 1 erfc 10
2
Tr
N 0TCOR
NT
η10, будучи Гауссовским с нулевым средним и дисперсией 0 COR 11.
2
Для i >2 (т.е., для C2, ... C6), случайная величина ηik пока является Гауссовским с нулевым
N 0TCOR
средним и дисперсией
, но они больше не независимы, с тех пор как Cik (t) = Ci (t-kTc)
2
не являются ортогональными к Cih (t) для k ≠ h.12
Однако возможно написать, Cik (t ) Cik' (t ) b(t ) , с
b(t )
1 Li 1 Li 1
Cij (t )
Li
j 0
так, чтобы Cik' (t ) были теперь ортогональными. Поэтому мы можем написать
ik =
TCOR
r (t ) C
ik
(t )dt ik ik
0
Замечание, что C1 является антиподной и что оба значения k = 0 и k = 1 являются равно вероятными.
erfc(x) функция определенная в разделе 2.4.3.2.
12
Кроме того для параллельного процессора Рисунок 16 та же самая (коррелированная) входная шумовая
выборка обработаны различными корреляторами Li для поиска максимума.
10
11
CCSDS 000.0-G-0
Стр. 2-48
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
ik =
TCOR
TCOR
TCOR
0
0
'
'
'
n(t ) Cik b(t ) dt n(t ) Cik dt n(t ) b(t )dt ik
0
ik' будучи независимыми Гауссовскими случайными переменными с дисперсией:
N0
1
1 TCOR
2 Li
тогда вероятность правильного решения (для зондирующей последовательности Ci) при
условии, что13:
2
'
P(Ci ) P( i 0 max i1 ,, iLi 1 / Ci 0 ) P( i 0 0' max i1 1' ,, iLi 1 L' i 1 )
P( i 0 i1 0' max 1' ,, L' i 1
где мы использовали, что ρi2 = ρi3 =… = ρiLi-1
Заметим, что интегральное распределение вероятности14
P max 1' ,..., L' i 1 x P 1' x P 2' x P L' i 1
1
x
x 1 erfc
2
2 '
Li 1
и что функция плотности вероятности x = i0 - i1 + η’0 есть
x 2
i0
i1
exp
2
22'
2
'
Px
1
мы можем написать вероятность правильного решения для фазы кода последовательности Ci
как интеграл по всем возможным значениям x т.е.
1
x
P(Ci ) 1 erfc
2
2 '
Li 1
x 2
i0
i1
exp
dx
2
22'
2
'
1
с ρi0, ρi1 и σ’η функциями TCOR как представлено выше.
Определяя y x / 2 ' , i 0 i1 2 2' находим:
2
P(Ci )
1
1 2 erfc( y )
Li 1
2
exp y dy
1
где
13
14
Предполагая, что k = 0, k = 1... k=Li-1 равновероятны. В дальнейшем, чтобы упростить выражения, мы удаляем
двойной индекс (i, k) так, чтобы hk=hik.
Используем статистическую независимость шумовой компоненты η ’k
CCSDS 000.0-G-0
Стр. 2-49
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
2
2
i 0 i1 Li E c TCOR i 0 i1 Li PRNG
TCOR
L
L
Li 1 N 0 Tc
Li 1 N 0
И, наконец, процесс захвата полной PN дальномерной последовательности закончен
успешно, когда все локально сформированные зондирующие последовательности Ci окажутся
совпадающими по фазе с принятой дальномерной последовательностью или 15
6
PACQ C P(Ci ) .
i 1
Для параллельного приемника наземной станции все корреляции определены для одного и
того же времени, а время захвата, TACQ равно TCOR в упомянутых выше уравнениях.
Необходимое время корреляции TCOR для вероятности успешного захвата PACQ, равной 99,9 %
получено путем инвертирования уравнения, приведенного выше.
15
Решения относительно фаз зондирующих последовательностей коррелированы, но этой корреляцией
фактически можно пренебречь.
CCSDS 000.0-G-0
Стр. 2-50
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
2.6.3.3
Сравнение приблизительного и точного анализа
Теоретические значения времени захвата, определенные в Синей книге [1] были получены,
используя точные выражения, и процедуру представленные в Разделе Error! Reference
source not found.
Однако, следуя упрощенному подходу и замечая, что:
значения, относятся к 2Ec/N0= -33 дБ или PR/N0= 27 дБГц,
время захвата при 30 дБГц составляет половину времени захвата при 27 дБГц,
нормализованное время корреляции наиболее продолжительно (максимальное)
для зондирующей последовательности C6, таким образом, оно определяет полное
время захвата
для полностью параллельного метода время захвата составляет 1/23 времени
захвата для бортового случая
находим 3,87 сек. для T4B и 0,23 сек. для T2B при PR/N0 30 дБГц. Это соответствует ошибке
приблизительно 10 % по сравнению с результатами точного анализа. Как подчеркнуто выше,
упрощенный анализ не верен с теоретической точки зрения, так как он полагает, что
шумовые условия на выходе коррелятора статистически независимы (среди других
корреляторов в полностью параллельной схеме). Однако, он очень полезен, так как позволяет
найти, полностью законченное выражение для времени захвата, показывающее зависимость
от отношения С/Ш и коэффициентов кода ξ и ψ.
На практике, характеристики захвата на станции затрагивают влияние бортовой
нелинейности [13], которая приводит к ухудшениям за счет коэффициентов корреляции
последовательности (ξi, ψi), ведущей к увеличению времени захвата. Этот эффект может
аналогично характеризовать имитацию моделирования уменьшения PR/N0: показывая, что
нелинейная система приводит к дополнительной потере приблизительно 0,7 дБ с очень
небольшими различиями между разными кодами. В принципе то же самое касается и
передачи на борт, но поскольку канал передачи на станции намного более линеен,
увеличение времени захвата в этом случае незначительно.
Ниже в ТаблицеТаблица 2–11 показано сравнение между значениями, вычисленными по
точной и приближенной формулам в контрольной точке 30 дБГц для случая 76 корреляторов.
CCSDS 000.0-G-0
Стр. 2-51
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Таблица 2–11. Сравнение результатов для параллельного приемника наземной станции
Последовательность
Максимальное Tacq
при PR/N0=30 дБГц
(точная формула)
Балансная Таусворта с
взвешенной оценкой, =4
идеально: 4,31 с
Балансная Таусворта с
взвешенной оценкой, =2
идеально: 0,26 с
Максимальное Tacq
при PR/N0=30 дБГц
(приблизительно)
идеально: 3,87 с
с 10% увеличением:
4,26 с
идеально: 0.23 s
с 10% увеличением:
0,25 с
Кроме того, формируя отношение между бортовым и станционным временем захвата (точные
значения) можно видеть, что выгода для полностью-параллельного приемника составляет
примерно 20 вместо 23 (время захвата равно длине последовательности C6) используемое в
первом приближении.
2.7
НАЗЕМНАЯ СТАНЦИЯ И ФЛЮКТУАЦИИ СКВОЗНОГО КАНАЛА
2.7.1 ВВЕДЕНИЕ
На наземной станции для измерений дальности могут быть реализованы два различных
решения:
1. Метод замкнутой петли, основанный на петле ФАП отслеживания чипов (CTL) как
это было проанализировано в Разделе 2.5 применительно к бортовым приборам. В
этом случае для оценки работы наземной станции применимы те же самые уравнения.
2. Структура без обратной связи (разомкнутая петля), проанализированная в
следующем Разделе 2.7.2.
Теоретические характеристики дальномерных флюктуаций в аппаратуре наземной станции и
анализ представленный в этом разделе основаны на применении средств обработки:
1. Мягкое квантование сигнала фильтра обнаружения чипа (согласованный фильтр)
2. Отсутствие влияния дискретизации по времени (количество выборок на чип)
3. Отсутствие влияния телеметрии передаваемой по р/л «борт-земля»
4. Отсутствие влияния флюктуаций передаваемого на борт сигнала дальности р\л «земляборт»
Вклад радиолинии «земля-борт» (флюктуации бортовой CTL) в флюктуации сквозного
канала, должен быть рассмотрен отдельно, это подробно сделано в Разделе 2.7.3.
CCSDS 000.0-G-0
Стр. 2-52
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
2.7.2 ХАРАКТЕРИСТИКИ СТРУКТУРЫ БЕЗ ОБРАТНОЙ СВЯЗИ
Дальше для оценки задержки дальномерного сигнала мы проанализируем структуру без
обратной связи (разомкнутую петлю) подходящую для применения на наземной станции.
Необходимо подчеркнуть, что точные PN измерения дальности выполняются на компоненте
таковой частоты сравнивая (в корреляторе I/Q) фазу принятого сигнала тактовой частоты с
фазой локальной точной копии тактовой частоты. Так, при дальнейшем анализе, мы
представляем дальномерный сигнал состоящим только из компоненты тактовой частоты
пренебрегая, другими PN элементами (используемыми для разрешения неоднозначности).
Дальше будут рассматриваться три примера:
1- Синусоидально-прямоугольный (несовпадающий случай) – компонента тактовой
частоты дальномерного сигнала синусоидальная (сформированный сигнал синусоида)
и опорный сигнал прямоугольной формы в I/Q демодуляторе:
N0
c
Range_ OL _ sin e _ sq
[м]
16 f RC
PRC T
2- Синусоида-синусоида (совпадающий случай) – тактовая компонента дальномерного
сигнала синусоидальная (сформированный сигнал синусоида) и опорный сигнал (в I/Q
демодуляторе) синусоидальной формы:
N0
c
Range _ OL _ sin e _ sin e
[м]
PRC T
32 2 f RC
3- Прямоугольник-прямоугольник (совпадающий случай) – тактовая компонента
дальномерного сигнала прямоугольной формы и сигнал I/Q демодулятора
прямоугольной формы:
N0
c
[м]
Range_ OL _ sq _ sq
16 f RC PRCT
Заметьте, что в упомянутых выше выражениях мы использовали ту же самую символику,
которая была применена для бортовой петли отслеживания чипов, но в этом случае, вместо
BL, ширины полосы петли, мы имеем время интеграции T на переходах I/Q коррелятора фазы.
Что касается бортовых выражений CTL, также в этих случаях PRC/N0 представляет
превышение мощности тактовой частоты дальности над спектральной плотностью шума на
входе I/Q коррелятора.
Из приведенных выше выражений мы видим, что:
Range_ OL _ sin e _ sq Range_ OL _ sq _ sq
при
32 2
Range_ OL _ sin e _ sin e
16
32 2
1,11 .
16
8
CCSDS 000.0-G-0
Стр. 2-53
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
2.7.2.1
Синусоидально-прямоугольный (несовпадающий случай)
Набросок блок-схемы на Рисунке
Рисунок 17, представляет блок-схему для демодуляции и обработки дальномерного сигнала
(RDP).
Сигнал на входе RDP задан:
x(t ) s (t ) n(t ) 2C sin 0 t msin t t 2 n c (t ) cos 0 t t 2 n s (t ) sin 0 t t
s (t )
n (t )
где:
C = мощность несущей [Вт]
0 = частота несущей [рад/с]
t = 2ft тональная частота дальности [рад/с]
ft = тональная частота дальности [Гц]
m = индекс модуляции тональной частоты дальности [рад-пик]
= фаза тона дальности, которая будет оценена [рад]
и nc(t), ns(t) есть квадратурные компоненты АБГШ имеющие спектральную плотность равную
N0/2 (т.е., превышение мощности сигнала над шумами равна C/N0).
Сигнал y(t) на выходе демодулятора несущей задан выражением:
y(t ) 2 C J1 (m) sin t t nc (t ) cost t ns (t ) sin t t
предположив, что фильтр нижних частот подавляет гармоники более высоких порядков
дальномерных сигналов.
Рисунок 17. Демодулирование и обработка дальномерного сигнала: блок-схема верхнего
уровня
CCSDS 000.0-G-0
Стр. 2-54
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Неизвестная задержка фазы (см. Рисунок
Рисунок 17), приблизительно, оценивается по совпадающей по фазе WQ и квадратурной
компоненте WQ сигнала y (t) следующим образом:
WI
y(t ) Sin t dt
t
T
WQ y(t ) Cost t dt
T
где T есть измеренное время интегрирования (в секундах) и:
Sinx sgn sin( x)
Cos x sgn cos( x)
WQ
Sin(t t )
WI
WQ
tan( ) tan( t )
Cos(t t )
WI
Рисунок 18. Определение фазовой задержки
Из
приведенных
выше
соотношений
можно
найти
средние
значения
W I , WQ
и
среднеквадратичные отклонения I , Q измерений дальности на выходе корреляторов:
WI 2 C J1 m sin t t Sint t dt 2 C J1 m sin t t
T
T
4 C
WQ
I
4
sin t t dt
J1 (m) cos( )T
4 C
J 1 (m) sin( )T
N0
T
2
CCSDS 000.0-G-0
Стр. 2-55
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
N0
T
2
Q
Задержка двухпутевого измерения дальности связана с фазой следующим соотношением:
WQ
1
arc tan
t
W
I
Вычисление среднеквадратичного отклонения
дальности даёт:
WI
2
задержки двухпутевого измерения
12
2
2
2
I
Q
W
Q
будучи:
W
1
2 Q 2
WI
t WI WQ
1
W
2 I 2
WQ t WI WQ
Из приведенных выше выражений имеем:
2
2
1
N0
1
N0
WQ
W
I
2
T 2
T
t W W 2 2
t WI WQ2 2
I
Q
1
t
12
N0T
1
2
2 WI WQ2 1 2
Замена WI и WQ на WI и WQ соответственно, приводит к:
1
8 ft
1
1
1
8 ft
PRC
T
N0
C
2
N0
2
J 1 ( m) T
или:
CCSDS 000.0-G-0
[s]
Стр. 2-56
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
где f t t 2 частота тона дальности (также обозначаемая как тактовая частота fRC для PN
измерений дальности) и PRC/N0 есть отношение мощности тона дальности к спектральной
плотности шума. Окончательно, точность измерения однопутевой дальности может быть
определена как:
Range_ OL _ sin e _ sq c
2
c
P
16 f t RC
N0
[м]
T
где c – скорость света [м/с].
Синус-Синус (согласованный случай)
2.7.2.2
В этом случае нормализованный (удельная мощность) опорный сигнал (в корреляторе)
2 cost t
2 sint t
Средние значения на I и Q переходах (на выходе коррелятора) становимся:
WI y (t ) 2 sint t dt 2C J1 cos T
T
WQ y(t ) 2cost t dt 2C J1 sin T
T
пока мы можем показать, что, для среднеквадратичного отклонения I и Q, уравнения
Раздела 2.7.2.1 все еще действительны. Подставляя вышеупомянутые уравнения в выражение
для среднеквадратического значения, имеем:
1
t
1
8 f t
2
N 0T
1
2
2
WI WQ2
N0
PRCT
12
1
2f t
N 0T
2
1
2CJ12T 2
[с]
Среднеквадратическое отклонение измерения однопутевой дальности может быть записано
как:
Range_ OL _ sin e _ sin e c
2
c
P
32 2 f t RC T
N0
[м]
где c скорость света, а ft также как и обозначение fRC (тактовая частота дальности для PN
измерений) и PRC/N0 –отношение мощности тональной частоты дальности к спектральной
плотности шума.
CCSDS 000.0-G-0
Стр. 2-57
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Range_ OL _ sin e _ sin e
c
P
32 2 f t RC T
N0
[м]
Прямоугольник-прямоугольник (согласованный случай)
2.7.2.3
В этом случае тактовая частота представляет собой сигнал прямоугольной форы, таким
образом, выражение Раздела 2.7.2.1 становится:
x(t ) s(t ) n(t ) 2C sin 0 t m Sin t t
s (t )
2nc (t ) cos0 t t 2ns (t ) sin 0 t t
n (t )
Сигнал y(t) на выходе демодулятора несущей имеет выражение:
y(t ) C sin( m) Sint t nc (t ) cost t ns (t ) sin t t
Развивая упомянутые выше выражения, мы можем найти синфазные и квадратурные
компоненты сигнала на выходе интегратора (см. Рисунок Рисунок 18):
2
WI 2C sin m Sint t Sint t dt C sin m T 1
T
2
WQ 2C sin m Sint t Cost t dt C sin m T
T
Из-за влияния шумов, выражения для величины с.к.о. на выходе интегратора, действительны
также и для времени задержки дальномерного сигнала ( = t):
WQ
2 t WI WQ
и
12
2
2
N0
WQ
W
N0
I
T
T
W W 2 2
2t WI WQ 2 2
I
Q
2 t
2t
WQ
N 0
T
2 WI WQ 2
2
WI
W W 2
I
Q
2
12
WI2 WQ2
N0
T
2
WI WQ 2
откуда:
CCSDS 000.0-G-0
Стр. 2-58
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
W
I
WQ
2
C sin( m)T
2
2 2
WI2 WQ2 C sin( m)T 1
2
2
Подставляя эти выражения, имеем:
1 2 t 2 t
=
C sin( m)T
2
2t
1
4 2 ft
N0
T
2
1
PRC
T
N0
2
1 2 t 2 t
2
2
При этом PRC C sin 2 (m) мощность тактового сигнала дальности.
Предположим, что 'грубое' значение угла оценено путем сначала используя выбор
квадранта (основанный на признаке sign WI и WQ), а затем оценено его 'тонкое' значение в
диапазоне от 0 до π/2. В этом случае мы имеем:
02
t
1
t
, мы замечаем, что функция f ( x)
диапазоне от 0,5 2 до 1 для 0 x 1 (или 0 ).
Допуская x 2
1 x2 x2
принимает значения в
2
Тогда мы можем написать:
1
4 2 ft
Range c
2
1
PRC
T
N0
c
8 2 ft
1
PRC
T
N0
Минимальное значение для f(x) имеется для x=1/2 ( = t =/4); в этом случае мы имеем
f ( x) 0,5 2 и можем написать:
CCSDS 000.0-G-0
Стр. 2-59
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
c
16 f t
1
PRC
T
N0
Range
c
1
8 2 ft
PRC
T
N0
Точность измерения дальности зависит от угла или задержки , которые должны быть
измерены. Заметим, что можно достичь лучших характеристик (меньшая величина сигмы) в
случае, если при измерениях руководствоваться следующей методикой:
- предварительная оценка угла ,
- поворот осей координат, так, чтобы иметь WI и WQ такими, когда угол близок к
-
/4,
заключительное точное измерение.
В этом случае можно записать:
Range_ OL _ sq _ sq
2.7.2.4
c
16 f t
1
PRC
T
N0
[м]
Сравнение параметров открытой и замкнутой петли
Чтобы минимизировать спектральное заполнение, сигналу дальности на борту пред
передачей в радиолинию «борт-земля» придается синусоидальная форма. По этой причине
можно рассмотреть следующие два случая как наиболее общие:
Петля ФАП, отслеживающая чипы:
Range_ CTL _ sin e _ sq
Петля без обратной связи:
Range _ OL _ sin e _ sin e
BL
PRC N 0
1
c
2 8 f RC
c
32 2 f RC
N0
PRC T
[м]
[м]
Можно видеть в [11], что параметры замкнутой петли и петли без обратной связи (открытой
петли) - одинаковые, если 2BL =1/T.
Заменяя в этих выражениях условия, на условия, указанные в Синей книге [1]
BL=1 Гц (или T=0,5 с)
Чиповая скорость Fc = 2,068 Мчип/с; fRC= Fc/2
PR/N0 =30 дБГц
находим:
Последовательность
CCSDS 000.0-G-0
Range_ CTL _ sine _ sq
Стр. 2-60
Range _ OL _ sine _ sine
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
T4B
0,87 м
0,78 м
T2B
1,30 м
1,17 м
Таблица 2–12. Параметры флюктуаций дальности для наземной станции
Следует подчеркнуть, что эти величины отражают только вклад радиолинии «борт-земля»,
или другими словами они представляют полный вклад сквозного канала в случае, если вклад
флюктуаций на борту становится незначительным по сравнению с вкладом линии связи
«борт-земля». Характеристики полного сквозного канала смотрите в Разделе 2.7.3.
ХАРАКТЕРИСТИКИ СКВОЗНОГО КАНАЛА
2.7.3
2.7.3.1
Вступление
В этом разделе даны общие выражения оценки флюктуаций дальности сквозного канала для
случая построения системы с петлёй ФАП отслеживания чипов(CTL), реализованных как на
борту, так и в наземной станции. Оно основывается на том, что подход RSS (корень
квадратный из суммы квадратов) для флюктуаций сквозного канала действителен только в
случае, если ширина полосы петли CTL в наземной станции намного шире такой же полосы
на борту.
Когда ширины полосы BL петли ФАП на станции намного уже чем ширина полосы на борту,
должно быть применено другое выражение. Этот случай мог бы иметь место, когда на
наземной станции петля ФАП имела бы более высокий порядок и/или были реализованы
полуавтоматические схемы.
Подобное выражение также получено для случая построения на наземной станции схемы без
обратной связи (схемы с незамкнутой петлей).
2.7.3.2
Схема замкнутой петли (ФАП) наземной станции
В случае «синус-квадрат» (“sin_sq”) схема замкнутой петли применяется как для бортовой
аппаратуры, так и для аппаратуры наземной станции. Дисперсия для полной ошибки
сквозного канала измерения дальности при наличии тепловых шумов может быть записана
как в [15] (смотри также Раздел Error! Reference source not found.).
2
Range
1 c
2 8 f RC
2
N 01
N 02
2
2
H
(
f
)
H
(
f
)
df
H
(
f
)
df
1
2
2
2 PRC1
2 PRC 2
(м2)
В этом выражении мы использовали также уравнение, полученное для флюктуаций в схеме
отслеживания чипов CTL, применяя те же самые обозначения (fRC = тактовая частота
измерения дальности). Заметим, что нижний индекс 1 относится к бортовой схеме
отслеживания чипов (CTL), а 2 к схемеCTL.
Теперь, если мы знаем функции преобразования бортовой и наземной схем ФАП
отслеживания чипов, мы можем вычислить дисперсию для ошибки сквозного канала
CCSDS 000.0-G-0
Стр. 2-61
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
измерения дальности просто, применяя приведенные выше уравнения с вычислением этих
двух интегралов. Однако можно рассмотреть два приближения:
ширина полосы петли ФАП BL,2 Н/С значительно шире, чем полоса BL,1 бортовой ФАП
ширина полосы петли ФАП BL,2 Н/С значительно уже, чем полоса BL,1 бортовой ФАП
Эти приближения позволяют нам представить и вычислить флюктуации сквозного канала
измерения дальности более простым способом.
2.7.3.3
Полоса петли ФАП наземной станции значительно шире, чем полоса
бортовой петли ФАП (BL,1 << BL,2)
В этом случае (полоса ФАП наземной станции значительно шире полосы ФАП борта):
2
Range
1 c
2 8 f RC
1 c
2 8 f RC
2
2
N 02
2
2
N 01
H
(
f
)
df
1
H 2 ( f ) df
2 PRC 2
2 PRC1
N 01
PRC1
1
N 02
2
H 1 ( f ) df
2
PRC 2
1
2
H
(
f
)
df
2
2
2
1 c N 01
N
BL ,1 02 BL , 2 (м2)
PRC 2
2 8 f RC PRC1
Range Range_ CTL _ sin_ sq _ 1 2 Range_ CTL _ sin_ sq _ 2 2 (м)
Условие BL,1 << BL,2 в части среднеквадратичного значения ошибки измерения дальности
приводит к положению наихудшего случая так, как вклады, вносимые радиосистемами
«земля-борт» и «борт-земля» вычисляются отдельно. Однако, в данном частном случае
(BL,1 << BL,2), чтобы уменьшить среднеквадратическую ошибку, вызванную тепловыми
шумами, эти измерения, могут быть подвергнуты дальнейшей обработке (усреднению).
2.7.3.4
Полоса петли ФАП наземной станции значительно уже, чем полоса бортовой
петли ФАП (BL,1 >> BL,2)
В этом случае (полоса ФАП наземной станции значительно уже полосы ФАП борта) мы
имеем:
2
Range
1 c
2 8 f RC
1 c
2 8 f RC
CCSDS 000.0-G-0
2
N 02
2
2
N 01
H
(
f
)
df
2
H 2 ( f ) df
2 PRC 2
2 PRC1
2
N
1
N
2
H 2 ( f ) df 01 02
2
PRC1 PRC 2
Стр. 2-62
(м2)
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Range
1 c
2 8 f RC
N
N
BL, 2 01 02
PRC1 PRC 2
(м)
Заметим, что эта петля должна быть способна отслеживать принимаемую тактовую частоту,
подверженную воздействию тепловыми шумами радиолинии «борт-земля», а также и
флюктуациями бортовой следящей системы, передаваемыми (на Н/С) на регенерированном
PN дальномерном сигнале. Таким образом, петля ФАП наземной станции (и также ширина ее
полосы BL2) должны быть измеренными, учитывая характеристики отслеживания на борту.
2.7.3.5
Схема Н/С без обратной связи (разомкнутая петля)
Не так просто непосредственно вычислить правильное выражение для этого случая; однако
для разомкнутого цикла мы можем легко применить приближение BL,1 >> 1/T (где BL,1 ширина полосы бортовой ФАП, а T - время интеграции Н/С). Используя тот же самый
подход, который применен в Разделе 2.7.3.4 и рассматривая выражение для флюктуаций
разомкнутой петли в случае “sine_sine” можно написать:
Range
c
32 f RC
2
1 N 01 N 02
T PRC1 PRC 2
(м)
Заметим, что преимущество схемы с разомкнутой петлей состоит в том, что никакая петля
отслеживания на тактовой частоте не является необходимой для оценки задержки, таким
образом, время интеграции T не ограничено значениями флюктуаций бортового
отслеживания. Однако необходимо отметить, что схема с разомкнутой петлёй требует
когерентности между скоростью передачи чипов и несущей частотой
2.7.3.6
Анализ сквозного канала
Сквозной канал измерения дальности реализованный через следующие функции (для борта и
Н/С мы принимаем использование схем ФАП отслеживания чипов):
Радиолиния «земля-борт» Наземная станция (для краткости Н/С)
- Формирование дальномерного сигнала радиолинии «земля-борт»
- ФМ модуляция несущей радиолинии «земля-борт» дальномерным сигналом
На борту
- Демодуляция несущей
- Захват и отслеживание дальномерного сигнала (на основе схемы ФАП
отслеживания чипов)
- Формирование когерентного сигнала измерения дальности (синхронизация по
фазе с переданной на борт и возвращаемой тактовой частоты и фазой)
- ФМ модуляция несущей радиолинии «борт-земля» регенерированным
дальномерным сигналом
Радиолиния «борт-земля» Наземная станция
- Демодуляция несущей
- Захват и отслеживание Н/С дальномерного сигнала на основе ФАП
отслеживания чипов
- Сравнение между принятой и переданной фазой кода для измерения задержки
CCSDS 000.0-G-0
Стр. 2-63
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
В последующем анализе, для простоты, мы рассматриваем процесс модуляции и демодуляции
несущей как идеальный процесс. Кроме того, мы сосредотачиваемся на восстановлении
тактовой частоты дальности, это - компонента (дальномерного сигнала) используемая для
точного измерения дальности. Это эквивалентно тому, чтобы рассмотреть то, что мы
определяем как “Эквивалентная модель в полосе модулирующих частот” представленная
блок-схемой на РисункеРисунок19, где мы применили линейную теорию ФАП.
Кроме того, вместо схемы отслеживания чипов CTL, мы считаем классическую схему ФАП
(при условии, что PN дальномерный сигнал состоит только из тактовой частоты).
Расширение результатов анализа для случая CTL может быть легко применено как
заключительный шаг с введением надлежащих коэффициентов умножения (связанных со
структурой CTL), а также принимая во внимание скорость света для отсчёта
среднеквадратической ошибки в метрах.
Таким образом, мы можем написать для бортовой CTL:
G1 ( s) K d 1 F1 ( s)
KV 1
есть передаточная функция петли бортовой CTL без обратной связи
s
K d1
- коэффициент передачи фазового детектора бортовой CTL
KV 1
- постоянная ГУН или ГЦУ бортовой CTL
H 1 ( s)
G1 ( s)
1 G1 (s)
- передаточная функция замкнутой петли
PRC1
- мощность сигнала тактовой частоты на входе бортовой CTL
PRC1
N 01
-
превышение
мощности
тактовой
частоты
над
спектральной
плотностью шума на входе бортовой CTL
В то время как для петли отслеживания чипов (CTL) Н/С мы имеем:
G2 ( s) K d 2 F2 ( s)
KV 2
есть передаточная функция петли CTL без обратной связи Н/С
s
Kd2
- коэффициент передачи фазового детектора CTL Н/С
KV 2
- постоянная ГУН или ГЦУ CTL Н/С
CCSDS 000.0-G-0
Стр. 2-64
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
H 2 ( s)
G2 ( s )
1 G2 ( s )
- передаточная функция замкнутой петли
PRC 2
- мощность сигнала тактовой частоты на входе CTL Н/С
PRC 2
N 02
-
превышение мощности
тактовой
частоты над
спектральной
плотностью шума на входе CTL Н/С
Борт
Н/С
Измерение задержки
Рисунок19. “Эквивалентная модель в полосе модулирующих частот ” для сквозного
канала измерения дальности
Для тепловых шумов принимаем (в обоих случаях на входе CTL) модель АБГШ с 2-х
сторонней спектральной плотностью мощностью N01/2 для борта и N02/2 для земли. Применяя
CCSDS 000.0-G-0
Стр. 2-65
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
примечание Хевисайда, запишем предварительное значение переданной на борт фазы
тактовой частоты:
1 ( s) H1 ( s) o ( s)
N1 ( s )
H1 ( s)
PRC1
Заметьте что:
N1 (s) – преобразование Лапласа тестового сигнала n1(t) необходимо, чтобы оценить
передаточную функцию; позже n1(t) представит шумовой вероятностный процесс,
относящийся к бортовой модели АБГШ со спектральной плотностью мощности N01/2
1 (s) является также фазой передаваемой бортовой тактовой частоты
Таким же образом мы можем написать выражение для оценки фазы тактовой частоты
измерения дальности на наземной станции16:
2 ( s) H 2 ( s)1 ( s)
N 2 (s)
H 2 (s)
PRC 2
где N2(s) - эквивалент N1(s) на станции (в этом случае спектральная плотность мощностиN02/2.) Мы можем написать оценку фазы тактовой частоты 2 на наземной станции как
функцию фазы тактовой частоты 0 переданной наземной станцией:
2 ( s) H1 ( s) H 2 ( s) 0 ( s) H1 ( s) H 2 ( s)
N1 ( s)
N ( s)
H 2 ( s) 2
PRC1
PRC 2
Где первый член [ H 1 ( s) H 2 ( s) 0 ( s) ] представляет детерминированный (обусловленный)
отклик системы, в то время как последние два члена релевантны (свойственны) случайным
откликам системы
Для дисперсии ошибки в оценке фазы 0 мы можем написать:
2
1 N 02
1 N 01
2
2
2
H
(
)
H
(
)
d
1
H 2 ( ) d (rad )
2
2 2 PRC1
2 2 PRC 2
Используя следующие определения
Эквивалентная шумовая полоса системы:
B L ,eq
1 1
2 2
Эквивалентная шумовая полоса бортовой CTL: BL ,1 1 1
2 2
16
H
( ) H 2 ( ) d
2
1
H ( )
1
2
d
Следует заметить, что в этом анализе мы пренебрегаем задержкой фазы, имеющий отношение к пути
(среднему) прохождения ВЧ сигнала между Н/С и КА вместе с другими составляющими задержки сигнала в
бортовой и наземной электронике. Однако это не имеет значения для оценки флюктуаций.
CCSDS 000.0-G-0
Стр. 2-66
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Эквивалентная шумовая полоса CTL Н/С:
BL, 2
1 1
2 2
H
( ) d
2
2
для дисперсии ошибки мы можем написать:
2
N 01
N
BL,eq 02 BL, 2 (рад2)
PRC1
PRC 2
Как указано в Разделе 2.7.2.1 для случая “sin_sq” параметры CTL в части
среднеквадратической ошибки измерения дальности представлены следующим выражением:
1
c
Range_ CTL _ sin_ sq
2 8 f RC
BL
PRC N 0
(м)
Так для полной среднеквадратической ошибки сквозного канала мы можем написать:
1
Range
1 c
2 8 f RC
1 N 02
2 (м)
1 N 01
2
2
H
(
)
H
(
)
d
H
(
)
d
1
2
2
2 2 PRC1
2 2 PRC 2
Обратите внимание, что во всех приведенных выше уравнениях используются следующие
единицы измерения:
Частота (т.е.: fRC) в Гц
Мощность сигнала (т.е.: PRC) в Ваттах
Спектральная плотность мощности шума (т.е.: N01 и N02) в Ваттах/Гц
CCSDS 000.0-G-0
Стр. 2-67
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
2.8
ВЗАИМНОВЛИЯНИЕ С ТЕЛЕМЕТРИЕЙ И ТЕЛЕКОМАНДАМИ
2.8.1 ВВЕДЕНИЕ
Возможность взаимного влияния между телекомандами и измерением дальности, а также
между телеметрией и измерением дальности, когда сигналы передаются одновременно на
одной и той же несущей, была проанализирована и промоделирована. Из-за большого
диапазона возможных битовых скоростей передачи информации и скоростей передачи чипов,
рассмотреть все возможные случаи не представляется возможным. Вместо этого
рассматривались некоторые - наилучший (минимальное спектральное наложение) и
наихудший (максимальное спектральное наложение) случаи.
2.8.2
СОВМЕЩЕННАЯ РАДИОЛИНИЯ «ЗЕМЛЯ-БОРТ» ТЕЛЕКОМАНДЫ И
ДАЛЬНОСТЬ
В соответствии с рекомендациями CCSDS 401.0-B (2.2.4) и (2.2.7) [27] передача телекоманд и
измерения дальности, в принципе, могут быть выполнены в одно и то же время.
Наихудший случай из рекомендации CCSDS, 401.0-B (2.2.4) в отношении измерения
дальности заключается в том, что поднесущая 16 кГц модулируется по фазе (BPSK) битами
телекоманд с максимальной скоростью 4 кбит/с, получающийся сложный сигнал модулирует
по фазе остаток несущей. Очевидно, спектральное наложение между таким сигналом
телекоманд и PN сигналом измерения дальности минимально для чиповых скоростей выше
250 кчип/с. Выполненное моделирование (см. [19]) показало, что в этих случаях взаимные
потери дальности и телекоманд незначительны независимо от дальномерного кода и формы
сигнала формирования. С другой стороны, в случае, если использовать скорость передачи
чипов, приблизительно 32 кчип/с, то получающаяся тактовая частота 16 кГц, будет жестко
интерферировать с поднесущей телекоманд 16 кГц и не может быть передана в то же самое
время.
Сигнал, передаваемый на борт по радиолинии «земля-борт» (см. Рисунок Рисунок 20)
представляется:
xu (t ) = Ac cos[2f u t mRG xRG (t ) mTC xTC (t )]
где
• f u - центральная чатота радиолинии «земля-борт»;
• mRG - индекс фазовой модуляции для сигнала дальности;
• mTC - индекс фазовой модуляции для сигнала телекоманд;
• xRG (t ) - сигнал измерения дальности:
CCSDS 000.0-G-0
Стр. 2-68
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
x RG (t ) =
c h(t kT )
k
k =
c
а h(t ) есть функция отличная от нуля для значений t [0, Tc ] , и может быть либо
прямоугольными импульсами (меандром) ( h(t ) = hsq (t ) ), либо полуволной синусоиды
( h(t ) = hsin (t ) = sin (t/Tc ) ), Tc = 1/Rc - чиповый интервал, а Rc - чиповая скорость (2 Мчип/с
при моделировании), ck = 1 является периодической последовательностью значений,
определяемых выбранным дальномерным кодом;
• xTC (t ) - сигнал телекоманд:
xTC (t ) =
d
k =
k
gTC (t kTTC )
а gTC (t ) = sin (2f st ) для t [0, TTC ] , и ноль в остальной области, TTC = 1/RTC - интервал
передачи битов телекоманд а RTC битовая скорость передачи командной информации
( RTC = 4 кбит/с и f s = 16 кГц при моделировании), d k = 1 - случайная последовательность.
Если для дальномерного сигнала используется прямоугольные импульсы hsq (t ) , тогда
энергия, используемая для передачи одного дальномерного чипа и одного бита телекоманды,
составляет соответственно:
ERG,u 12 Ac2 J 02 (mTC ) sin 2 (mRG )Tc ; ETC ,u Ac2 J12 (mTC ) cos 2 (mRG )TTC ;
Если используются синусоидальные импульсы hsin (t ) , тогда мы имеем
ERG,u Ac2 J 02 (mTC ) J12 (mRG )Tc ; ETC ,u Ac2 J12 (mTC ) J 02 (mRG )TTC .
ТЕЛЕКОМАНДЫ
генератор
случайных
битов RTC
генератор
PN кода
RC
sin(2πfs t)
ПЕРЕДАТЧИК НАЗЕМНОЙ
СТАНЦИИ
mTC
xTC (t)
NRZ сигнал
дискретные
импульсы
+1/-1
фильтр
формирующий
меандр/синус
xRG (t)
аналоговый
фазовый
модулятор
mRG
ДАЛЬНОСТЬ
n (t)
Рисунок 20. Структурная схема передатчика наземной станции
CCSDS 000.0-G-0
Стр. 2-69
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
ТЕЛЕКОМАНДЫ
sin(m TC sin(2πfc t))
нуль -пороговый
детектор
I&D
TTC
Входной
фильтр
Выделение
квадратурных
составляющих
I&D
TC
БОРТОВОЙ
ПРИЕМНИК
коррелятор
к бортовому
передатчику
кодо-фазовый
детектор
ДАЛЬНОСТЬ
Рисунок 21. Структурная схема бортового приемника КА
На Рисунке
Рисунок 21 показана структурная схема бортового приемника; этот приемник является
оптимальным для системы телекоманд и системы дальности с импульсной функцией hsq (t ) , в
то время как, из-за наличия простого интегрирующего и демпфирующего фильтра, он не
оптимален для системы дальности с функций hsin (t ) .
БОРТОВОЙ
Если дальномерный
сигнал отсутствует, то вероятность ошибки для бита телекоманды
ПРИЕМНИК
Pid ,TC (e) =
1
erfc
2
ETC ,u
N0
.
Если сигнал дальности присутствует, то система телекоманд подвержена небольшим потерям
(см. РисунокРисунок 22), а PTC (e) Pid ,TC (e) . Таблица 2–13 перечислены измеренные потери
для PTC (e) = 10 4 , mRG = 0,7 радиан и mTC = 1,0 радиан. Потери, показанные здесь и в Разделе
2.8.3, измерены с помощью моделирования.
Таблица 2–13. Потери для системы ТК радиолинии «земля-борт» при
PTC (e)=10-4, mTC=1 рад, mRG=0,7 рад
код
CCSDS 000.0-G-0
h(t ) = hsq (t )
h(t ) = hsin (t )
T2B
0,04 дБ
0,06 дБ
T4B
0,02 дБ
0,05 дБ
Стр. 2-70
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Рисунок 22. Вход нуль-порогового детектора ТК при наличии помехового воздействия
дальности (шумов нет), mTC =1 рад, mRG =0,7 рад
Что касается системы дальности, в случае с hsin (t ) потери будут равны
Lsin = 10 log 10
2 J12 (mRG )
1
, E0 ( x) sin( x sin( u ))du
2
E0 (mRG )
0
из-за рассогласования импульсов в интегрированном и демпфированном приемнике; эти
потери составят 0,85 децибел, когда mRG =0,7 радиан. Кроме того, имеются дополнительные
потери из-за помехового воздействия сигнала телекоманд. В Таблица 2–14 перечислены
потери для системы измерения дальности при PRNG (e) =10-6 (т.е. вероятность того, что фаза
PN кода оценена неверно), при mTC =1 радиан, mRG =0,7. Потери практически не зависят от
целевой вероятности ошибки и системы с hsin (t ) показаны полные потери Lsin, которые
составляют немного больше чем 0,85 дБ + Lsq.
Таблица 2–14. Потери в радиолинии «земля-борт» Lsq (слева) Lsin (справа) для системы
измерения дальности при PRNG(e)=10-6, mTC=1рад, mRG=0,7 рад
код
h(t ) = hsq (t )
h(t ) = hsin (t )
T2B
0,19 дБ
1,07 дБ
T4B
0,19 дБ
1,07 дБ
Поэтому, потери только из-за помехового воздействия телекоманд составят порядка 0,2 дБ.
Согласно рекомендации CCSDS, 401.0-B (2.2.7) в схемах модуляции при достаточно высокой
скорости передачи данных, такой как 256 кбит/с, применяется непосредственная бифазная
модуляция остатка несущей. Учитывая, что такая схема обычно используется для передачи
телеметрии, оценка взаимного влияния этого сигнала с сигналом дальности имеется только в
Разделе 2.8.3. Однако, результаты, полученные там для телеметрии применимы также и к
телекомандам.
CCSDS 000.0-G-0
Стр. 2-71
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
2.8.3
СОВМЕЩЕННАЯ РАДИОЛИНИЯ «БОРТ-ЗЕМЛЯ» ТЕЛЕМЕТРИЯ И
ДАЛЬНОСТЬ
Передаваемый сигнал в радиолинии «борт-земля» (см. РисунокРисунок 23):
xd (t ) = Ac cos[2f d t mRG xRG (t ) mTM xTM (t )]
где
• f d - центральная частота радиолинии «борт-земля»;
• mRG - индекс фазовой модуляции для сигнала дальности;
• mTM - индекс фазовой модуляции для сигнала телеметрии ( mTM = 1,25 рад при
моделировании);
• xRG (t ) - сигнал дальности:
x RG (t ) =
c h(t kT )
k
k =
c
и h(t ) = hsq (t ) или h(t ) = hsin (t ) как для радиолинии «земля-борт»;
• xTM (t ) - сигнал телеметрии:
xTM (t ) =
d
k =
k
pTM (t kTTM )
и pTM (t ) = 1 для t [0, TTM /2] , pTM (t ) = 1 для t [TTM /2, TTM ] , TTM = 1/RTM - межсимвольный
интервал телеметрии и RTM - символьная скорость передачи телеметрической информации
(при моделировании RTM = 500 ксимв/с), d k = 1 - случайная последовательность.
Если для дальномерного сигнала используется меандр hsq (t ) , тогда, чтобы передать один чип
дальномерного сигнала и один символ телеметрии, должна соответственно использоваться
энергия:
ERG,d
Ac2
Ac2
2
2
2
2
cos [mTM ] sin [mRG ]Tc ; ETM ,d
cos [mRG ] sin [mTM ]TTM
2
2
в то же время, если используется синусоидальный импульс hsin (t )
ERG,d
Ac2
Ac2 2
2
2
[
m
]2
J
(2
m
)
T
E
J 0 (mRG ) sin 2 [mTM ]TTM
;
cos TM
1
RG
c
TM ,d
2
2
.
CCSDS 000.0-G-0
Стр. 2-72
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
На Рисунке 24 показана схема приемника наземной станции при передаче импульса hsq (t ) , а
на Рисунке 25 для передачи импульса hsin (t ) (на наземной станции может быть, реализован
более сложный приемник).
ТЕЛЕМЕТРИЯ
генератор
случайных
битов RTM
От бортового
приемника
БОРТОВОЙ
ПЕРЕДАТЧИК
меандр с
mTM
периодом ТTM
xTM (t)
SPL сигнал
генератор
PN кода
Rc
формипую- xRG (t)
щий фильтр
дискретные меандр/син
импульсы +1/-1
ДАЛЬНОСТЬ
аналоговый
фазовый
модулятор
Фильтр
передачи
усилитель
мощности
mRG
n (t)
Рисунок 23. Структурная схема бортового передатчика
Меандр с
периодом TTM
I&D
TTM
Идеальный
входной
фильтр
ТЕЛЕМЕТРИЯ
нуль - пороговый
детектор
Выделение
квадратурных
составляющих
I&D
TC
ПРИЕМНИК
НАЗЕМНОЙ СТАНЦИИ
корреляторы
кодо - фазовый
детектор
ДАЛЬНОСТЬ
Рисунок 24. Структурная схема приемника наземной станции для импульсов hsq (t )
Меандр с
периодом TTM
I&D
TTM
Идеальный
входной
фильтр
Выделение
квадратурных
составляющих
нуль - пороговый
детектор
sin(mRG |sin(π t/Tc)|)
I&D
TC
ПРИЕМНИК
НАЗЕМНОЙ СТАНЦИИ
ТЕЛЕМЕТРИЯ
корреляторы
кодо - фазовый
детектор
ДАЛЬНОСТЬ
Рисунок 25. Структурная схема приемника наземной станции для импульсов hsin (t )
CCSDS 000.0-G-0
Стр. 2-73
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
2.8.3.1
Флюктуации отслеживания в петле ФАП чипов (CTL)
Квадратурная составляющая принимаемого бесш
умового сигнала, используемого для выделения битов телеметрии, чипов измерения
дальности и синхронизации тактовой частоты чипов представлена вырвженим:
xq (t ) = Ac sin [mRG xRG (t )] cos[mTM xTM (t )]
Ac cos[mRG xRG (t )] sin [mTM xTM (t )]
и, для h(t ) = hsq (t ) (в этом разделе проанализированный только один случай), мы имеем:
xq (t ) = Ac cos[mTM ] sin [mRG ] ck hsq (t kTc )
k =
Ac cos[mRG ] sin [mTM ] d k pTM (t kTTM )
k =
= xq , RG (t ) xq ,TM (t ).
Так как дальномерный сигнал и сигнал телеметрии статистически независимы, спектр
мощности xq (t ) просто представляет собой:
Gx ( f ) = ( Ac cos[mTM ] sin [mRG ]) 2 GRG ( f ) ( Ac cos[mRG ] sin [mTM ]) 2 GTM ( f ) ,
q
где
sin 2 (fTTM /2)
GTM ( f ) = TTM
fTTM /2
спектр мощности есть
2
d pTM (t kTTM ) ;
k = k
GRG ( f ) =
|
k =
k
|2 ( f k/Tr )
является спектром мощности периодического сигнала дальности
c h (t kTc ) (период Tr = LrTc ), при этом
k = k sq
2
sin (n/Lr )
1
| n | =| C (n) |
, вместе с C (n) =
Lr
n/Lr
2
CCSDS 000.0-G-0
2
Стр. 2-74
Lr 1
c e
k
j 2nk/Lr
.
k =0
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Поскольку рассматривается синхронизация тактовой частоты чипов, мы интересуемся
спектром мощности на частоте f RC = 1/(2Tc ) = Rc /2 = ( Lr /2)/ Tr . На этой частоте, GRG ( f )
включает в себя спектральную линию с коэффициентом
2
| L /2 | =| C ( Lr /2) |
r
2
2
2
для рассматриваемых кодов значения | C ( Lr /2) |2 даны в ТаблицеТаблица 2–15 (см. также
Таблица 2–3).
Таблица 2–15. Коэффициент C ( Lr /2) для кодов T2B и T4B.
код
C ( Lr /2)
10 log 10 | C ( Lr /2) |2
T2B
-0,62736
-4,05 dB
T4B
-0,9368
-0,55 dB
Спектр мощности непрерывной компоненты GTM ( f ) на f RC равен
sin 2 (TTM /(4Tc ))
GTM (1/(2Tc )) = TTM
TTM /(4Tc )
2
Поэтому, поскольку рассматривается чиповая синхронизация, отношение между полезной
компонентой дальномерного сигнала и компонентой помехового сигнала телеметрии в
полосе пропускания BL составляет
2
tan (mRG )
[Rc /(4 RTM )] 2
2 2
=
|
C
(
L
/2)
|
r
T B [ 2 (R /(4 R ))] 2
TM L sin
c
TM
tan (mTM )
2
Несомненно, чем выше значение , тем лучше работа чиповой петли ФАП (CTL). Мы видим,
что зависит от отношения Rc /(4 RTM ) : если Rc = 2 Мчип/с и RTM = 500 кбит/сек, то
Rc /(4 RTM ) = 1 и ; для других значений Rc мы имеем конечные значения . Поэтому
система была проанализирована для Rc = 2 Мчип/с и Rc = 1,9 Мчип/с. На Рисунок 26 показан
переходный процесс в CTL для более простого случая, в котором формируется только сигнал
тактовой частоты дальномерного сигнала (так, чтобы петля CTL была оптимальным
синхронизатором, а C (Lr/2) =1); влияние сигнала телеметрии может быть отмечено как
среднее отклонение относительно идеального времени синхронизации (которое
соответствует средней ошибке при оценке расстояния, то есть недостаток точности), но
отклонение имеет место только, когда полоса пропускания CTL является очень большой. По
этой причине влияние телеметрии на синхронизации чипа дальномерного сигнала имеет
место, но его можно считать незначительным для нормальных полос пропускания петли
ФАП.
CCSDS 000.0-G-0
Стр. 2-75
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Рисунок 26. Переходный процесс захвата CTL, только для тактовой частоты
дальномерного сигнала, mTM=1,25 рад, mRG=0,2 рад, RTM=500кбит/с, Rc=1,9Мчип/с
Что касается временных флюктуаций в CTL (то есть оценки точности), на
Рисунок 27 и Рисунок 28 показана измеренная нормализованная дисперсия 2 / Tc2 для
чиповых скоростей 2 Мчип/с и 1,9 Мчип/с. Кривая обозначенная “идеальная полоса
модулирующих частот”, относится к случаю, когда на вход CTL подан сигнал
эквивалентный, в полосе модулирующих частот, компоненте тактовой частоты плюс шум
(телеметрии нет), так, чтобы 2 / Tc2 BL /( 4 Pr / N 0 ) BLTc /( 4 Ec / N 0 ) (как имело место в
Разделе Error! Reference source not found.). Другие кривые относятся к PN кодам измерения
дальности T2B и T4B подверженных помеховому воздействию телеметрического сигнала:
теоретическая дисперсия измерений дальности в отсутствии помехового воздействия
телеметрии
2 / Tc2 BL /( 4Pr / N0 ) BLTc /( 4 | C( Lr / 2) |2 ERG,d / N0 )
и поэтому данная дисперсия измерения дальности полученная при отношении E RG,d / N 0 ,
которое для кодов T4B и T2B, соответственно, на 0,55 и 4,05 дБ выше, чем в идеальном
случае. Кривые, показанные на рисунках, для кодов, T2B и T4B смещены на 0,55 и 4,05 дБ,
когда дисперсия составляет приблизительно 10-3, в то время как при меньших значений
дисперсии смещение становится немного большим (потери при значении 10-5 составляют
приблизительно 0,5 дБ). Дополнительные потери для этих двух кодов равны. И в заключение,
телеметрия имеет незначительное влияние на погрешность CTL и точность измерений.
CCSDS 000.0-G-0
Стр. 2-76
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Рисунок 27. Нормализованная дисперсия CTL измерения дальности, рассчитанная для случая
hsq(t), mTM=1,25 рад, mRG=0,2 рад, RTM=500 кбит/с, Rc=2Мчип/с
Рисунок 28. Дисперсия CTL измерения дальности для случая hsq(t), mTM=1,25 рад,
mRG=0,2 рад, RTM=500 кбит/с, Rc=1,9Мчип/с
2.8.3.2
Захват при PN измерениях дальности
В отношении системы измерения дальности, потери, вызванные помеховым воздействием со
стороны сигнала телеметрии, были измерены с помощью моделирования, и представлены в
Таблица 2–16 для случая mTM=1,25 рад, mRG=0,7 рад: код T4B, который допускает более
высокие потери и импульс hsq (t ) , который является более устойчивым к помехам. НаРисунок
29 показаны потери измерения дальности из-за влияния сигнала телеметрии как функция
CCSDS 000.0-G-0
Стр. 2-77
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
при mTM=1,25 рад и Rc = 2 Мчип/с, RTM = 500 кбит/сек: потери уменьшения с
уменьшением mRG, и лучшим случаем является случай с кодом T2B и hsq (t ) . В итоге потери
m
RG,
меньше, если телеметрия и дальность не синхронны, что обычно имеет место.
Таблица 2–16. Потери в системе измерения дальности радиолинии «борт-земля»
Lsq (слева) Lsin (справа) для при PRG(e)=10-6, mTM=1,25 рад, mRG=0,7
код
h(t ) = hsq (t )
h(t ) = hsin (t )
T2B
0,06 dB
0,10 dB
T4B
0,63 dB
1,16 dB
Рисунок 29. Потери в радиолинии «борт-земля» при измерениях дальности (дБ) в
зависимости от mRG, для mTM=1,25 рад.
2.8.3.3
Частота битовой ошибки телеметрии
В отсутствии дальности, вероятность ошибочного символа телеметрии составляет
Pid ,TM (e) =
1
erfc
2
ETM ,d
N0
.
Дальность оказывает помеховое воздействие, как показано на Рисунок 30: в
отсутствии шума и дальности, на вход детектора поступают только два уровня ±0.7, в то
время как в присутствии дальности появляются 4 уровня, и самый низкий уровень по
CCSDS 000.0-G-0
Стр. 2-78
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
абсолютной величине (то есть 0,5) встречается более часто для кода T2B (слева) чем для кода
T4B (справа).
Таблица 2–17 перечислены потери в системе телеметрии при PTM (e) =10-4, mTM=1,25 рад,
mRG=0.7, и можно заметить, что код, T4B дает меньшие потери, и что импульс hsin (t )
производит меньшее воздействие чем импульс hsq (t ) . На Рисунок 31 показаны потери
телеметрии из-за влияния сигнала дальности как функция mRG, при mTM=1,25 рад потери
увеличиваются с увеличением mRG, а лучшим случаем является код T4B и hsin (t ) . Дальнейшее
моделирование производилось в направлении измерения потерь, когда отношение между
скоростью передачи чипов и символьной скоростью ТМ есть нецелое число; на Рисунок 32
показаны случаи для RTM=500 ксимв/с и Rc=1,7 Мчип/с или 1,9 Мчип/с: различие между
случаями с hsin (t ) и hsq (t ) значительно меньше, а импульс hsq (t ) теперь должен быть
предпочтен, в то время как код T2B опять вносит в телеметрическую систему большие
потери, чем код T4B. В итоге, дальномерный сигнал ухудшает работу телеметрической
системы, а код T2B оказывает большее влияние, чем код T4B; измеренные потери составляют
менее 1 дБ, точное значение потерь зависит от выбранных параметров.
Рисунок 30. Выборки на входе нуль-порогового детектора телеметрического приемника:
импульс hsq (t ) , mTM=1,25 рад, mRG=0,7 рад, коды T2B (слева) и T4B (справа), шумов нет.
Таблица 2–17. Потери в телеметрической системе радиолинии «борт-земля»
при PTM(e)=10-4, mTM=1.25рад, mRG=0.7
код
CCSDS 000.0-G-0
h(t ) = hsq (t )
h(t ) = hsin (t )
T2B
0,84 dB
0,29 dB
T4B
0,8 dB
0,09 dB
Стр. 2-79
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Рисунок 31. Радиолиния «борт-земля» потери телеметрии (дБ)
в зависимости от mRG ,при mTM=1,25 рад.
Рисунок 32. Радиолиния «борт-земля» потери телеметрии (дБ)
в зависимости от mRG ,при mTM=1,25 рад и чиповых скоростей 1,9 Мчип/с и 1,7 Мчип/с.
CCSDS 000.0-G-0
Стр. 2-80
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
3
3.1
ТРАНСПАРАНТНЫЕ PN СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ
ВВЕДЕНИЕ
Транспарантные
(прозрачные)
PN
системы
измерения
дальности
считаются
привлекательными при наличии хорошего энергетического запаса в радиолинии (например,
околоземные низкоорбитальные полеты) или когда очень точные измерения дальности не
являются необходимыми
Характеристики транспарантных измерений обеспечиваются, ссылаясь, главным образом, на
уравнение, полученное для регенеративного случая и, в общем случае, пока применимым.
Действительно выражения, полученные для захвата и отслеживания кода (ошибка по
дальности) - те же самые или легко получаемые их них. Что касается регенеративного метода
существенное различие, относящееся к обработке на борту и, в особенности, из-за возможных
искажений на борту канала измерения дальности (т.е.: неравномерность амплитудной
характеристики и линейности фазы) в процессе реверсирования передачи (ретрансляции). Для
прозрачного канала измерения дальности сообщается в описании [13] включая технические
характеристики различных программируемых функциональных блоков и определения
нелинейностей.
Стоит подчеркнуть, то, что касается последовательной схемы измерения дальности,
критическую роль в действиях по измерению дальности в процессе определения орбиты играет
также стабильность задержки в зависимости от мощности входного сигнала, сдвига частоты и
температуры.
3.2
ВЫБОР ПОСЛЕДОВАТЕЛЬНОСТИ T2B
Для транспарантного PN измерения дальности, на наземной станции процессы передачи на
борт точно такие же, как и случае регенеративного измерения. Однако при транспарантном
способе PN измерений на космическом аппарате PN дальномерная последовательность не
выделяется; вместе с тем, как и в традиционный транспарантной системе измерения
дальности (также обозначенная как дальномерная последовательность), это передача на борт
сигнала модулированного по фазе дальномерным сигналом, который затем принимается по
радиолинии «борт-земля» без обработки. Приемник наземной станции демодулирует
принимаемый сигнал и выполняет корреляция PN последовательностей таким же образом как
при регенеративном способе измерений. Поскольку шумы радиолинии «земля-борт»,
передаваемые на борт повторно модулируют сигнал радиолинии «борт-земля», точность
транспарантных измерений вообще не будет столь же высокой как в случае регенеративных
измерений. Первостепенное преимущество транспарантных измерений состоит в том, что
требуется меньше обработки сигнала в бортовом транспондере, уменьшая его сложность.
Последовательность T2B, уже рекомендованная для использования в регенеративном канале
главным образом для того, чтобы обеспечивать условия низкого отношения С/Ш, является
последовательностью, выбранной для применения в каналах транспарантных измерений.
CCSDS 000.0-G-0
Стр. 3-1
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
3.3
СРАВНЕНИЕ С РЕГЕНЕРАТИВНЫМ СЛУЧАЕМ
3.3.1 ОБРАБОТКА НА СТАНЦИИ: ЗАХВАТ И ОТСЛЕЖИВАНИЕ
На наземной станции, может быть выполнена та же самая обработка как в регенеративном
случае: приемник демодулирует сигнал, принятый по радиолинии «борт-земля»,
восстанавливает
чиповую
частоту
и
выполняет
корреляции
зондирующих
последовательностей, чтобы получить последовательность T2B, используя полностью
параллельный метод. Так анализ характеристик захвата, проведенный в Разделе 2.6 для
регенеративного случая остается пока действующим. В этом случае Синяя книга определяет
время захвата при 10 дБГц, где теоретическое время захвата дано 26,2 с, что в 100 раз больше
чем в транспарантном случае.
Характеристики слежения (в части флюктуаций) также могут быть получены из тех же
выражений, которые были выведены для регенеративного измерения дальности. В частности
для замкнутой петли (на основе ФАП по чиповой частоте), анализ которой приведен в
Разделе 2.5, все еще действителен, в то время как, для схемы с петлей без обратной связи,
результаты, полученные в Разделе 2.7.2, являются применимыми. Конечно, анализ сквозных
характеристик Раздела 2.7.3 больше не применимым, так как бортовой вклад в флюктуации
слежения исчезает. Применяя те же условия, которые обозначены в Синей книге [1]:
BL=1 Гц (или T=0,5 с)
Чиповая скорость Fc = 2,068 Мчип/с; fRC= Fc/2
PR/N0 =10 дБГц
находим:
Последовательность
Range_ CTL _ sine _ sq
Range _ OL _ sine _ sine
T2B
13 m
11,7 m
Таблица 3–1. Характеристики станционных флюктуаций измерения дальности
Это стоит, подчеркнуть, что вышеупомянутые результаты для захвата на станции и
характеристики основаны на теоретических оценках, принимая идеальной операцию
поворота (ретрансляции) на борту (без учета влияния нелинейности).
3.3.2 ОБРАБОТКА НА БОРТУ
Теоретические характеристики захвата, полученные в предыдущем разделе и использующие
те же самые уравнения, которые были выведенные для регенеративного случая, могут быть
подвержены сильным воздействием при бортовой обработке дальности, в особенности при
неравномерности АЧХ в рабочей полосе частот и нелинейности фазочастотной
характеристики. Анализ был сделан, чтобы определить требования для:
нелинейности канала (изменения групповой задержки и неравномерности
усиления в полосе),
ширины полосы частот по уровню 3 дБ,
и ширины шумовой полосы.
CCSDS 000.0-G-0
Стр. 3-2
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
Анализ выполнен параметрическим методом рассматривая:
различные высокие частоты среза,
присутствие или нет телекоманд, эхо-сигнал режекторного фильтра (низкая
частота среза).
В [13], [23] и [24] показано, что:
Чистый канал, сигнал пропускается через фильтр нижних частот, имеет лучшие
характеристики захвата по сравнению с каналом, имеющим фильтр высших для
удаления телекоманд.
В случае фильтра высших частот с частотой среза в пределах 350 кГц,
вычисленные времена захвата для Fc = 3 Мчип/с увеличились примерно на
50 %. При очень низком отношении PR/N0o, результат получается таким, что
время захвата становится неприемлемо длинным.
Чтобы сохранить захват PN последовательности на борту близким к
теоретическому значению, желательно иметь широкополосный канал.
Односторонняя ширина полосы частот должна быть, по крайней мере, 1,5*Fc
для максимального 10%-ого увеличения времени захвата.
CCSDS 000.0-G-0
Стр. 3-3
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
4
PN ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЧЕРЕЗ НЕКОГЕРЕНТНЫЙ
ТРАНСПОНДЕР
Для полетов, в которых проектируется использование для измерений дальности,
приемопередатчик или некогерентный транспондер и не требуется высокой точности
измерения дальности, возможно выполнить двухпутевые некогерентные измерения.
Преимущество этой техники в том, что на борту космического аппарата могут быть
применены более простые аппаратные средства. В этом случае может быть применен либо
транспарантный либо регенеративный метод измерений.
При двухпутевом некогерентном измерении дальности, бортовая обработка передаваемого на
борт сигнала идентична когерентному измерению дальности, описанному в предыдущих
разделах. На космическом аппарате либо осуществляется фазовая модуляция несущей
радиолинии «борт-земля» принятым PN сигналом с шумами радиолинии «земля-борт» (в
случае транспарантного режима измерений), либо выделение и регенерация дальномерной
PN последовательности сигнала радиолинии «земля-борт» как описано в Разделе 2.4 (в случае
регенеративного измерения). Однако, в следствии того, что частота несущей радиолинии
«борт-земля» привязана к частоте бортового генератора, а не к несущей радиолинии «земляборт», наземная станция не сможет выполнить с помощь доплеровского смещения несущей
полуавтоматическую настройку дальномерного сигнала. Это потому, что принимаемая
чиповая частота имеет Доплеровскую составляющую от обеих радиолиний «земля-борт» и
«борт-земля», в то время как частота принимаемой несущей имеет Доплеровскую
составляющую от радиолинии «борт-земля» плюс составляющая из-за погрешности частоты
бортового генератора. Полуавтоматическая доплеровская настройка требует чтобы Доплер
принимаемой несущей и Доплер чиповой частоты были согласованными.
Используя некогерентный режим измерения дальности и приемник наземной станции без
ФАП, будет, как правило, несоответствие на частоте передачи чипа между принятым PN
кодом и локальной моделью, коррелированной в наземной станции. Это происходит из-за не
компенсированного Доплеровского смещения. Различие в чиповых скоростях заставит
корреляцию дальности вырождаться, и введет к систематической погрешности определения
дальности при измерениях. Если траектория космического аппарата хорошо известна, тогда
передаваемая на борт частота и частота чипов могут быть подстроены так чтобы
минимизировать Доплеровское смещение, видимое на космическом аппарате.
Дополнительно, имеет место также отклонение скорости передачи чипов из-за составляющей
вносимой погрешностью частоты генератора космического аппарата. Вообще это может быть
смягчено, но не удалено полностью, путем регулирования передаваемой на борт частоты и
скорость чипов, чтобы создать компенсацию дрейфа частоты генератора на космическом
аппарате в дополнение к Доплеровскому сдвигу передаваемой на борт частоты. Другое
решение могло бы быть в том, чтобы использовать на борту КА ультрастабильный генератор
(USO) как эталон для несущей радиолинии «борт-земля» и частоты передачи PN чипов.
4.1
ПРИЕМНИК НАЗЕМНОЙ СТАНЦИИ С ПЕТЛЁЙ БЕЗ ОБРАТНОЙ СВЯЗИ
Для модели приемника наземной станции с разомкнутой петлей (без ФАП), несовпадение
тактовых частот дальности между принимаемым PN кодом и локальной моделью имеет два
основных эффекта. Первый эффект - уменьшение амплитуды корреляции, которая в свою
CCSDS 000.0-G-0
Стр. 4-1
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
очередь уменьшает отношение С/Ш дальности и делает измерение зашумлённым.
Уменьшение амплитуды корреляции, Ac, дано в [7]:
Ac
sin( f chipT )
f chipT
где fchip разница частот между принимаемой чиповой скоростью и локальной моделью
(обратите внимание, что чиповая скорость есть удвоенная тактовая частота дальности), а T
время интегрирования. Уменьшение амплитуды корреляции снижает отношение С/Ш
сигнала дальности и увеличивает флюктуации вызванные тепловыми шумами и время
захвата.
Второй эффект - смещение измерений, вызванное несовпадением частот. Различие между
частотой локальной модели и принятой тактовой частотой сигнала дальности приводит к
разности фаз между ними, которая изменяется (дрейфует) в течение интервала измерения.
При условии, что начало отсчета измерения дальности приходится на начало интервала
интеграции, вместо середины, ошибка по дальности равна половине полного дрейфа в
течение времени интеграции, T, как изложено в [7]:
Range bias
cf chipT
4 f chip
где fchip - разность частот между принятой и локальной частотой чипов. Ошибка по частоте
будет иметь в общем случае составляющие, относящиеся к дрейфу частоты генератора на
космическом аппарате, и неточности прогноза по Доплеру. Отметьте, что систематическая
ошибка по дальности пропорциональна времени интеграции для данной разности чиповых
частот. Таким образом, для некогерентных измерения дальности, предпочтительно
использовать самое короткое время интеграции, которое допускает ограничение,
определяемое тепловыми шумами.
4.2
ПРИЕМНИК НАЗЕМНОЙ СТАНЦИИ С ЗАМКНУТОЙ ПЕТЛЁЙ (С ФАП-ОМ)
Для модели приемника наземной станции с замкнутой петлей обратной связи (с ФАП),
ширина полосы ФАП отслеживания дальномерных чипов, должна быть сделана достаточно
широкой, чтобы отслеживать изменения частоты передачи чипов, вызванной дрейфом
бортового генератора и некомпенсированным Доплером. Это будет ограничивать
характеристику флюктуаций, как описано уравнениями в Разделе 2.7 (для регенеративного
случая) и Разделе 3.3 (для транспарантного случая измерения дальности). Кроме того, будет
иметь место смещение дальности, как описано уравнением в предыдущем разделе.
CCSDS 000.0-G-0
Стр. 4-2
январь 2010 г.
PN-СИСТЕМЫ ИЗМЕРЕНИЯ ДАЛЬНОСТИ ЗЕЛЕНАЯ КНИГА, ПРОЕКТ
ПРИЛОЖЕНИЕ А
[НАИМЕНОВАНИЕ ПРИЛОЖЕНИЯ]
[Приложения содержащие вспомогательную информацию. Смотри CCSDS A20.0-Y-2,
Руководство по оформлению публикаций CCSDS (Желтая Книга, Издание 2, июнь 2005г.) для
обсуждения особенностей материала, содержавшегося в приложениях.]
CCSDS 000.0-G-0
Стр. 1
январь 2010 г.