Пособие Попов
advertisement

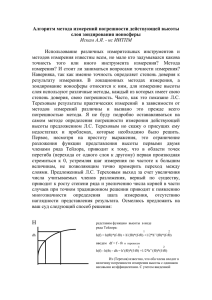
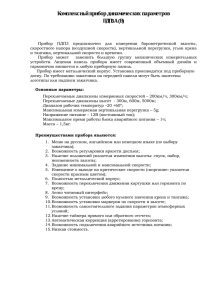
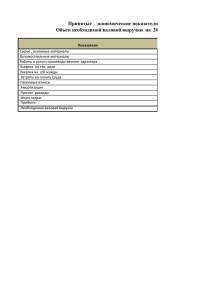
МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ГРАЖДАНСКОЙ АВИАЦИИ В.М. Попов АВИАЦИОННЫЕ ПРИБОРЫ И ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫЕ СИСТЕМЫ Пособие к лабораторной работе ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК СИСТЕМЫ ВОЗДУШНЫХ СИГНАЛОВ СВС-ПН-15 для студентов V курса специальности 160903 всех форм обучения Иркутск - 2007 2 ФЕДЕРАЛЬНОЕ АГЕНТСТВО ВОЗДУШНОГО ТРАНСПОРТА ФЕДЕРАЛЬНОЕ ГОСУДАРСТВЕННОЕ ОБРАЗОВАТЕЛЬНОЕ УЧРЕЖДЕНИЕ ВЫСШЕГО ПРОФЕССИОНАЛЬНОГО ОБРАЗОВАНИЯ «МОСКОВСКИЙ ГОСУДАРСТВЕННЫЙ ТЕХНИЧЕСКИЙ УНИВЕРСИТЕТ ГРАЖДАНСКОЙ АВИАЦИИ» Кафедра авиационных электросистем и пилотажно-навигационных комплексов В.М. Попов АВИАЦИОННЫЕ ПРИБОРЫ И ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫЕ СИСТЕМЫ Пособие к лабораторной работе ИССЛЕДОВАНИЕ ХАРАКТЕРИСТИК СИСТЕМЫ ВОЗДУШНЫХ СИГНАЛОВ СВС-ПН-15 для студентов V курса специальности 160903 всех форм обучения Иркутск - 2007 3 Лабораторная работа Исследование характеристик системы воздушных сигналов СВС-ПН-15 Целью лабораторной работы является изучение принципа действия, особенностей конструкции, характерных отказов системы воздушных сигналов СВС-ПН-15, а также экспериментальное исследование ее основных характеристик. 1. Назначение и устройство системы воздушных сигналов СВС-ПН-15 1.1. Назначение и комплект СВС-ПН-15 Система СВС-ПН-15 устанавливается на дозвуковые самолеты и служит для вычисления сигналов абсолютной На и относительной Н барометрической высоты, числа М, индикаторной (приборной) Vпр и истинной V воздушных скоростей, а также отклонений от заданных значений абсолютной барометрической высоты, числа М и индикаторной скорости. В комплект системы входят (см. рис. 1): - вычислитель скорости, числа М и высоты ВСМВ-1-15; - указатели высоты УВ0-15К с блоками питания БПУ-3; - указатели скорости УСВПк с блоками питания БПУ-3; - указатели числа М УМ-1К -0,82 с блоком питания БПУ-3; - блок преобразования, потенциометрический На ВПнП-2; - блок преобразования потенциометрический Н БПнП-4; - блок преобразования потенциометрический V БПнП-10; - блок питания БП-27-2; - корректор-задатчик высоты K3B-0-I5; - блоки сигналов готовности БСГ; - корректор-задатчик скорости КЗСП; - блок корректора числа М БКМЭ; . - фильтр Ф-115-1. Количество указателей, корректоров-задатчиков и блоков сигнала готовности может быть иным и определяется конкретной комплектацией системы. Кроме того, в комплект могут входить унифицированные вычислители аэродинамических поправок типа УВАП, законы формирования которых зависят от типа летательного аппарата. В этих вычислителях имеются собственные датчики давлений Рст и Рд, а поправки вычисляются таким же образом, как и в вычислителях типа ВАП электромеханических высотомеров УВИД,- с помощью каскадной потенциометрической схемы умножения, в которой в качестве решающих элементов использованы потенциометры датчиков Рст и Рд, щетки которых через передаточно-множительные механизмы связаны с подвижными центрами соответствующих чувствительных элементов. "Программа" "Коррекция" ~115 В, 400 Гц +27 В (при Р1 = 101 Па) Р БСГ Vи зад КЗСП Рп Н3 Р3 Vи Δ V V БПУ УМ М Тт "Программа" "Коррекция" А Нотк V БПУ УВО Рис. 2.1. Структурная схема схема системы системы СВС-ПН-15 Рис. 1. Структурная СВС-ПН-15 БКМЗ Рп Р ВСМВ М (+27 В) "Коррекция" БПУ УСВП К "Готовность" БП Ф Нотк БПУ УВО Нотк(Rотк) V(Rотк) от ДИСС Vп Нзад ΔМ БСГ КЗВ Р (+27 В) "Готовность" ΔН А Н(Rотк) БПН П "Готовность" (+27 В) БПН П БПН П V БПУ УСВП К 4 5 Температура заторможенного потока воздуха измеряется приемником П-5, не входящим в комплект СВС. Выходными сигналами системы являются Hа , H (Hотн), M, V и отклонения H от заданного постоянного, либо программного значения высоты Hа . Основным элементом системы служит вычислитель ВСМВ-1-15М, в котором размещены также датчики статического Pст и динамического Pд давлений. Он предназначен для решения градуировочных формул (1.1)...(1.4) и выдачи сигналов, пропорциональных H, Hа , M, V в виде относительных сопротивлений. Это преобразование сигналов осуществляется в блоках преобразования напряжения (БПнП), подключаемых к выходам вычислителя. Операции сложения и вычитания выполняются в вычислителе с помощью усилителей. Нелинейные функции реализуются в таких системах диодными функциональными преобразователями напряжения типа ПНФ, а операции умножения и деления заменяются соответственно сложением и вычитанием логарифмов искомых величин с последующим потенциированием полученного результата с помощью ПНФ. Сигнал Нз поступает в вычислитель из указателя УВОк левого пилота и используется для определения относительной высоты Н. 1.2. Основные технические данные СВС-ПН-15 1. Диапазоны измерения выходных параметров: - число М : 0,3 ... 1,0; - истинная воздушная скорость: 100 ... 1200 км/ч; - абсолютная барометрическая высота: 500 ... 15 000 м; - относительная барометрическая высота: 0 ... 15 000 м. 2. Время готовности: - 15 мин. при температуре окружающей среды выше - 30°С; - 30 мин. при температуре порядка - 60°С. 3. Потребляемая мощность: - от сети 115B 400 Гц 350 ВА; - от сети 36В 400 Гц 180 ВА; - от сети = 27В 150 Вт; - от сети = 15B 15 Вт. 4. Масса комплекта - не более 67 кг. 1.3. Вычислитель скорости, числа М и высоты BCMB-1 В вычислителе BCMB-I-15М в соответствии с приведенными ниже градуировочными формулами определяются число M, скорость V, абсолютная Hа и (или) относительная H барометрические высоты. Число M определяется из соотношения 6 Рд f1( M ) , Рст где f1 (M) = (1 - 0,2M )3,5 - 1 при M 1; f1 (M) = 166 ,9 М 7 7 М 2 ,5 - 1 (1) при M > 1. 1 Истинная скорость V вычисляется с учетом определенного в соответствии с (1) значения числа M по формуле: V = f2 (M) Т Т , (2) сМ R уд , χ =1,4 – постоянная где f2 (M) = , c = 1 0 ,2 М 2 адиабатического процесса; R – 287,05287 Дж/кг К- удельная постоянная воздуха. Абсолютная барометрическая высота Hа вычисляется по гипсометрическим формулам стандартной атмосферы: 2 Hа = fн (Pст ) R уд1 Tc Pст gc где f н ( Рст ) 1 , 1 Pc R удT11 P11 f н ( Рст ) 11000 ln , gc Pст (3) при Н а 11 км ; при 11 км Н а 20 км ; ; R уд 3 T20 Pст g с f н ( Рст ) 20000 1 , при 20 км Н а 32 км ; 3 P20 Тс = 288,15К, Рс = 760 мм рт.ст. (1013 гПа), gс = 9,80665 м/с2 – стандартные значения параметров атмосферы; Р11, Т11, Р20, Т20 – статические давления и температура по стандартной атмосфере для высот 11 и 20 км; β1 = - 6,5∙10-3К/м, β2 =10-33К/м – температурные градиенты. Относительная барометрическая высота определяется выражением H = Hа - Hз , (4) где заданная высота Hз, полученная из (1.3) при Pст = Pз - абсолютная барометрическая высота заданного уровня отсчета. Вычислитель является аналоговым счетно-решающим устройством, предназначенным для решения градуировочных формул (1) - (4) и выдачи сигналов, пропорциональных H, Hа , M, V в виде относительных сопротивлений. 7 В корпусе вычислителя размещены индукционные датчики статического и динамического давлений (ДДСИ и ДДДИ), пять функциональных преобразователей напряжения ПНФ, 12 усилителей, трансформаторы, элементы коммутационной аппаратуры и система терморегулирования. Для исключения влияния температуры на работу вычислителя в нем применена система обогрева и терморегулирования, включающая биметаллические термоэлементы, исполнительные реле, нагревательные элементы из токопроводящей смолы, вентилятор и электромагнитный клапан. Система поддерживает в вычислителе температуру 50±5°С. При превышении заданной температуры биметаллические датчики выключают нагревательные элементы, и открывается клапан подачи в корпус вычислителя охлаждающего воздуха. Помимо основных имеются дополнительные нагревательные элементы, включаемые при температуре t° < 45°С для уменьшения времени готовности вычислителя при низких температурах. Датчики давлений и узел ПНФ имеют системы индивидуального обогрева. Структурная схема вычислителя ВСМВ-1-15М, представленная на рис. 3, включает следующие основные элементы: - индуктивный датчик статического давления ДДСИ; - индуктивный датчик, динамического давления ДДДИ; - функциональные преобразователи напряжения ПНФ; - полупроводниковые масштабные усилители У; - трансформаторы Т. Входными параметрами вычислителя служат статическое Pст и полное Pп давления, подаваемые от приемника ПВД-7; заданная высота Hз в виде омического сопротивления от указателя УВОк; а также температура торможения TТ, поступающая в виде омического сопротивления от приемника температуры П-5, не входящего в комплект СВС. Ввиду нелинейности характеристик упругих чувствительных элементов ДДСИ и ДДДИ, которыми являются анероидная и манометрическая коробки, зависимости выходных напряжений Uст и Uд от соответствующих давлений на большей части рабочего участка близки к логарифмическим ( рис. 2). Uст UА 0 Рмин Рмакс Рст 0 Рис. 2. Статические характеристики ДДСИ и ДДДИ Рд Рис. 3. Структурная схема вычислителя ВСМВ-1-15М . 8 9 Решение градуировочных формул с учетом характеристик датчиков осуществляется функциональными преобразователями ПНФ (ПНФ1 и ПНФ5 для ДДСИ, и ПНФЗ - для ДДДИ). На выходе ПНФ1 и ПНФ5 напряжения Uз и UT пропорциональны lg 1/Рст , а соответственно и абсолютной высоте На. На выходе ПНФЗ напряжение U11 пропорционально lgРд. С помощью ПНФ8 получается сигнал в виде напряжения U5, пропорционального числу М. На выходе ПНФ9, стоящего в канале истинной воздушной скорости V, выдается сигнал в виде напряжения U12, пропорционального величине fu(M). Этот сигнал подаётся через усилитель У11 на первичную обмотку трансформатора T3, реализующего формулу (2). Ввод функции ТТ обеспечивается за счет изменения входного сопротивления трансформатора Т3 при изменении сопротивления Rт, подключенного к его вторичной обмотке (рис. 4). R Тр Uвх W1 W2 Rт Uвых Рис. 4. Схема умножения, реализуемая на трансформаторе В результате с помощью трансформатора Т3 реализуется схема умножения и напряжение на его выходе пропорционально величине истинной воздушной скорости V. Масштабные полупроводниковые усилители У1-У12 предназначены для усиления сигналов по мощности и напряжению. Помимо функций усиления они производят развязку каналов выходных параметров и исключают влияние нагрузки потребителей, а также влияние ПНФ друг на друга. У трансформаторов начальных значений, не показанных на рис. 3, в каналы параметров H, Hа , V, числа М вводятся сигналы U01… U05 для согласования начальных значений входных и вычисляемых параметров с целью компенсации ненулевых остаточных сигналов и фазовых искажений в каналах системы. Вычисление выходных параметров производится следующим образом. Напряжение U1 с выхода ДДСИ подается на усилитель У1, с выхода которого напряжение совместно с напряжением смещения поступает на вход ПНФ5. Напряжение U3, пропорциональное На, через усилитель У3 и трансформатор Т7 поступает на выход вычислителя. Одновременно разность напряжения U3 и напряжения U1*, пропорционального Нз, в виде напряжения Uу, пропорционального Н, с выхода усилителя У2 через трансформатор Т27 подается к потребителям. 10 Операции сложения в аналоговых вычислительных схемах реализуются точнее операции деления, поэтому для повышения точности вычисления числа М выражение (1) преобразуется в вычислителе к следующему виду: lg Рд = lg 1/Рст - lg f(M) (5) Для удобства реализации (5) статические характеристики датчиков ДДСИ и ДДДИ подбираются таким образом, чтобы зависимости выходных напряжений Uст и Uд от соответствующих давлений на большей части рабочего участка были близки к логарифмическим. Статические характеристики датчиков давлений близки к логарифмическим. С помощью преобразователей ПНФ1 и ПНФ3 выходные сигналы датчиков U1 = Uст и U2 = Uд корректируются до точного соответствия их логарифмическим зависимостям. В результате на выходе ПНФ1 1 напряжение U7 пропорционально lg , а на выходе ПНФ3 напряжение U11 Рст пропорционально lgPд. Напряжение U1, пропорциональное lg 1/Рст, через усилитель У4 поступает на вход ПНФ1. Выходное напряжение ПНФ1 подается на усилитель У5. Напряжение U2, пропорциональное lg Рд, через усилитель У6 совместно с начальным напряжением смещения U04 поступает на вход преобразователя ПНФЗ. С выхода ПНФЗ напряжение U4, пропорциональное lg Рд, после усиления в У7 суммируется с начальным напряжением смещения U03 и выходным напряжением усилителя У5, пропорциональным lg 1/Рст. В результате получается напряжение Uт, пропорциональное lg Рд, поступающее на входы ПНФ8 через усилитель У8 и ПНФ9 через усилитель У10. Напряжение U5, пропорциональное числу М, суммируется с начальным напряжением U05 и через усилитель У9 поступает на размножающий трансформатор Т28. Встроенный контроль осуществляется подачей на входы усилителей У1, У4, У6 контрольных сигналов UЭT1 и UЭT2, соответствующих тестовым значениям Рст к Рд. Одновременно ко вторичной обмотке Т4 вместо сопротивления приемника температуры подключается резистор Rэт. При этом показания указателей высоты, скорости и числа М должны быть равны расчетным значениям в пределах установленных допусков. Поскольку датчики давлений в процессе контроля не отключаются, для компенсации сигнала ДДСИ в канале Н перед проверкой необходимо установить кремальерой стрелку указателя высоты на нуль. Измерение статического и динамического давления осуществляется индуктивными датчиками ДДСИ и ДДДИ, конструктивно входящими в состав вычислителя. Они имеют аналогичные принципиальные схемы и отличаются лишь упругими чувствительными элементами: в ДДСИ применяется анероидная коробка, а в ДДДИ манометрическая. Основными элементами индуктивного датчика статического давления ДДСИ-2М-30 (рис. 5) являются два одинаковых измерительных узла, каждый из которых состоит из анероидной коробки А и индуктивного преобразователя. 11 R1 R2 А W1 Ф1 W2 Ф2 t0 W5 R6 R3 R4 W3 Ф3 R7 R16 W6 W4 Ф4 Uвых R16 R13 R5 t0 C2 R8 R10 R9 А C1 R18 Uэт1 t0 ~ ~ 0 ТБ1 НЭ +27В tR 11 R12 W1 R17 ТБ2 R5 Р5 W5 W2 V5 а) б) Рис. 5. Индуктивный датчик статического давления: а) принципиальная электрическая схема; б) расположение обмоток Жесткий центр анероидной коробки перемещается в зависимости от абсолютного давления и перемещает подвижную обмотку индуктивного преобразователя. Каждый индуктивный преобразователь состоит из двух неподвижных первичных обмоток W1, W2 (W3, W4), включенных встречно, и подвижной вторичной обмотки W5 (W6). Вторичная обмотка перемещается недвижным центром анероидной коробки. Обмотки W5 и W6 включены последовательно. Перемещение жестких центров анероидных коробок происходит встречно, что позволяет исключить погрешности от действующих на ЛА ускорений вдоль осей обмоток. Изменение статического давления Рст приводит к перемещению подвижных обмоток относительно неподвижных, наводящиеся при этом в неподвижных обмотках ЭДС суммируются. На выходе датчика будет сниматься сигнал в виде напряжения U1= f( lg 1/Рст). Подбором резисторов R1…R4 добиваются равенства магнитных потоков Ф1 и Ф2 (Ф3 и Ф4) первичных обмоток, вследствие чего при среднем положении вторичных обмоток, показанном на рис. 5, их ЭДС равны нулю, этому 12 положению подвижной системы соответствует максимальное давление Рст = Рmax. Для уменьшения инструментальных температурных погрешностей датчика в нем с помощью системы термостатирования поддерживается температура 45 ± 5°С. Система включает в себя нагревательный элемент НЭ, реле Р5 и биметаллические термоэлементы ТБ1 и ТБ2. Если температура в датчике превысит 45°С, термоэлемент ТБ1 размыкает цепь питания реле Р5. При отказе ТБ1 и достижений предельной рабочей температуры 60°С предусмотрено выключение обогрева контактами ТБ2. Погрешность из-за неточной стабилизации температуры устраняется термокомпенсацией I и II рода. Смещение нуля выходного сигнала компенсируется мостиковым термокомпенсатором I рода, состоящим из сопротивлений R9 … R12. Изменение наклона характеристики датчика компенсируется термокомпенсатором II рода с помощью сопротивлений R7, R8 . Вычисление выходных параметров вычислителя ВСМВ-1 производится с помощью бесконтактных функционалъных преобразователей напряжения ПНФ. Воспроизведение заданной функции осуществляется в них путем кусочно-линейной аппроксимации. Преобразователи ПНФ состоят из отдельных ячеек, каждая из которых рассчитана на аппроксимацию функции одним отрезком. Так как все решаемые зависимости, кроме соотношения (2), на рабочих участках являются вогнутыми, либо выпуклыми, рассмотрим принцип построения преобразователей ПНФ для воспроизведения этих двух видов функций. Для простоты рассмотрим вначале принцип действия ПНФ на постоянном токе (рис. 6). R1 Uвх Rн VD1 VD2 VD3 VDn-1 VDn R2 R3 R4 Rn-1 Rn E1 E2 E3 En-1 En Uвых Рис. 6. Принципиальная схема ПНФ на постоянном токе В аналоговых электронных СВС используются ПНФ переменного тока, которые имеют некоторые отличия от рассмотренного выше. 13 На рис. 7 приведена схема ПНФ переменного тока для воспроизведения выпуклых функций. Схема состоит из ячеек с резисторами Ri, диодами VDi, VDi*. Uвых U0nn U0nn-1 U0nn-2 U0n3 U0n2 U0n1 Uвх U1 U2 U3 Un-2 Un-1 R1 ~Uвх С Un а) +() R2 Rn ~Uвых Rн VD1 VD*1 U0n1 r1 + VD* (n-1) r(n-1) U´0n (+) r´1 (+) VD (n-1) r´(n-1) () VDn ()+ U0n ~U0n ~ VD*n б) Рис. 7. ПНФ переменного тока для воспроизведения выпуклых функций: а) воспроизводимая функция; б) принципиальная схема Необходимым условием нормальной pаботы данной схемы является обеспечение синфазности входного и опорного напряжений. Регулировка фазы Uвх с этой целью осуществляется конденсатором С, питаемым от потенциометра П. Пусть в положительный полупериод синфазных напряжений Uвх и Uon потенциалы на элементах схемы распределены, как это показано на рис. 7. Диод VDn будет открыт, в результате возникнут опорные напряжения Uoni. 14 Левые диоды VDi ячеек ПНФ при условии 0 < Uвых < Uon i будут заперты этими опорными напряжениями, а правые диоды VDi закрыты напряжением Uвых. В течение отрицательного полупериода напряжений Uвх и Uon (потенциалы даны на рис. 7 в скобках) диод VDi* будет открыт и функции запирающих напряжений изменятся, хотя диоды ячеек ПНФ по-прежнему будут закрыты. При малых Uвх для случая 0 < Uвых < Uon i токи по резисторам Ri не протекают, и крутизна первого участка характеристики определяется сопротивлением резисторов R1 и Rн. С ростом Uвх при Uвых > Uon 1 откроется первая ячейка, резистор Rн зашунтируется резистором R2. Крутизна характеристики Uвых = f(Uвх ) на втором участке уменьшится. При Uвых > Uon 2 откроется вторая ячейка и подключится резистор R3 и т.д. Схема ПНФ для воспроизведения вогнутых функций (рис. 8) работает аналогично. Отличие состоит лишь в месте подключения резистора Rн. Условием отпирания ячейки ПНФ в данном случае служит соотношение Uвх - Uвых > Uon i. Крутизна характеристики Uвых = f(Uвх ) возрастает, так как при воспроизведении вогнутых монотонно возрастающих функций шунтирующие сопротивления резисторов Ri подключаются параллельно ограничивающему резистору R1. R2 R1 Rn Uвх Rн U0n1 r1 Uвых VD1 VD*1 VD (n-1) VD* (n-1) r(n-1) U´0n r´(n-1) VDn r´1 VD*n U0n Рис. 8. ПНФ переменного тока для воспроизведения вогнутых функций Преобразователь ПНФЭ для воспроизведения зависимости f2(M) представляет собой комбинацию двух ПНФ (рис. 9), один из которых служит для воспроизведения вогнутых функций, другой выпуклых. Это объясняется видом воспроизводимой функции f2(M), представленной на рис. 9, а. 15 U0n~ Uвых Диодные ячейки R1 ~Uвх Диодные ячейки R2 Uвх Uвых б) а) Рис. 9. Комбинированный ПНФ переменного тока: а) воспроизводимая функция; б) принципиальная схема С увеличением Uвх первыми открываются диодные ячейки, сопротивления которых шунтируют R2. Все ПНФ вычислителя отличаются друг от друга количеством диодных ячеек и характером воспроизводимых функций. Подбором достаточного числа ячеек добиваются высокой точности аппроксимации заданных функций (погрешности аппроксимации при этом не превышают сотых долей процента). 1.4. Блоки преобразования числа М БКМЭ напряжения БПнП и коррекции Блок преобразования напряжения потенциометрический БПнП работает по принципу самобалансирующейся компенсационной схемы. Схема состоит из усилителя У, электродвигателя типа ДГ, потенциометра обратной cвязи Пос, выходных потенциометров Пвых, лекального корректора КМ и дифференциального индукционного преобразователя ИД (рис. 10). Uоn~ Uвх~ У Д Пос Пвых rвых Г Uоn~ ИД КМ Рис. 10. Структурная схема потенциометрического блока преобразования напряжения БПнП 16 Элементы Пос и ИД питаются опорным напряжением от вычислителя. Поступающее на вход напряжение Uвх из вычислителя сравнивается на входе усилителя У с суммой напряжений, снимаемых с потенциометра Пос и преобразователя ИД. Сигнал рассогласования через усилитель У подается на управляющую обмотку электродвигателя. Вращение передается на щетки потенциометров Пос и Пвых и продолжается до тех пор, пока рассогласование не будет устранено. Сопротивление rвых потенциометров Пвых при этом будет соответствовать входному напряжению. Лекальный корректор КМ с преобразователем ИД предназначен для компенсации систематических инструментальных погрешностей функциональных элементов БПнП. Генераторная обмотка Г служит для обеспечения отрицательной обратной связи. Для регулирования выходных сигналов системы СВС-ПН -15 в начале и конце диапазона соответствующего параметра в цепь потенциометра Пос включены два юстировочных сопротивления, не показанных на рис. 10. Блок коррекции числа М электрический БКМЭ выдает сигнал, пропорциональный отклонению числа Маха от заданного значения (рис.11). ФЧУ U~ М ΔU () У () Р1 Г ИБДУ Д U~ = ΔМ3 U~ = ΔМ3 Р П r М +27 В "Корре кция" Р1 Рис. 11. Структурная схема электрического блока коррекции числа М Этот сигнал выдается в виде напряжений переменного и постоянного тока при подаче команды на включение коррекции (+27В). На вход блока из вычислителя поступает сигнал в виде напряжения переменного тока частотой 400 Гц, пропорционального числу Маха. В режиме слежения этот сигнал сравнивается с сигналом, снимаемым в виде напряжения переменного тока с индуктивного датчика угла поворота ИВДУ. Сигнал рассогласования ΔU через усилитель подается на обмотку управления двигателя Д, выходной вал которого через редуктор Р вращает подвижный элемент ИВДУ, меняя его выходное напряжение. Одновременно вал двигателя Д вращает щетки выходных потенциометров П. 17 Вращение вала двигателя Д продолжается, пока сигнал рассогласования не станет равным нулю. Каждому значению числа М в режиме слежения соответствует определенное значение выходного сопротивления потенциометров П. Режим коррекции включается при подаче сигнала "КОРРЕКЦИЯ" (+27В) на обмотку реле Р1. При этом к выходу усилителя У подключается фазочувствительный усилитель (ФЧУ), а электродвигатель с помощью электромагнитной муфты отключается (на рис. 11 она не показана). В результате при изменении сигнала на входе блока БКМЭ на выходе ФЧУ появляются сигналы, пропорциональные ΔМ, в виде напряжений постоянного и переменного тока. При снятии сигнала "КОРРЕКЦИЯ" блок БКМЭ продолжает работать в режиме слежения. В блоке имеется система сигнализации готовности, не показанная на рис. 11. Сигнал готовности в виде напряжения +27В выдается при наличии питания в цепях постоянного и переменного тока при исправности узлов следящей системы блока. 1.5. Корректор-задатчик (приборной) скорости КЗСП высоты КЗВ-0-15 и индикаторной Корректор КЗВ работает в комплекте с блоком сигнала готовности БСГ и не связан с остальными блоками СВС. Он выдает сигналы в виде напряжения постоянного и переменного тока частотой 400 Гц, пропорциональные отклонению ЛА от заданной высоты полета. Электрокинематическая схема корректора КЗВ и электрическая схема БСГ представлены на рис. 12. Чувствительным элементом КЗВ является анероидная коробка 1, подвижный центр которой соединен с якорем 2 индуктивного датчика ИД. Ось вращения якоря, перпендикулярная плоскости рисунка (точка 3), и Ш-образный статор датчика закреплены на подвижном основании 4, которое может поворачиваться посредством червячной передачи двигателем-генератором ДГ0,5 ТА. Корректор КЗВ может работать в трех режимах: обнуления, коррекции и работы от программного устройства. Режим обнуления является подготовительным перед режимом коррекции. Режимы работы КЗВ проследим по схемам рис. 12 и 13. При отсутствии управляющего сигнала "ВКЛ. КОРР.", когда контакты коммутационных устройств находятся в состоянии, показанном на рис. 12, КЗВ работает в режиме обнуления выходного сигнала. Если высота полета изменится, то вследствие поворота якоря индуктивного датчика из-за деформации анероидной коробки нарушается равенство зазоров 1 и 2 . Следовательно, возникает разностный сигнал 1 включенных встречно вторичных обмоток датчика, поступающий на входы усилителей У1 и У2. С выхода У1 усиленное напряжение подается на 18 управляющую обмотку электродвигателя, который поворачивает статор индуктивного датчика до восстановления равенства зазоров 1 и 2 . Сигнал тахогенератора обеспечивает скоростную обратную связь. Таким образом, в результате работы следящей системы сигнал 1 индуктивного датчика, а следовательно, и выходной сигнал корректора Uвых (выход У2), несмотря на изменение высоты полета, поддерживаются близкими к нулю. Δ2 Р4 Р3 4 Δ1 3 Р4 У2 У1 М Р1 +27 Г КВ R2 Р1 У3 R3 Р5 +"вкл. прогр." +"вкл. корр." Р5 К ~ 5 δ2 δ1 R1 в САУ +27В Р7 Р6 Р6 Р7 Р6 "готовн." "отказ" +"вкл. корр." 2 6 7 +"вкл. прогр." б) а) Рис. 12. Принципиальная схема KЗB (а) и БСГ (б): 1 – анероид; 2 – якорь; 3 - ось вращения якоря; 4 - подвижное основание статора; 5 - потенциометр сигнала абсолютной высоты; 6 - биметаллическая скоба; 7 – планка Сигнал абсолютной барометрической высоты Нкзв = На со сдвоенного потенциометра 5, щетки которого связаны с валом ИГ, в рассмотренном режиме не используется. Профилировка потенциометра с помощью шунтов компенсирует нелинейность характеристики анероидной коробки. Включение режима коррекции производится летчиком. При этом на реле P1 и Р2 из САУ подается сигнал +27В "ВКЛ.КОРР.". Контакты этих реле разрывают цепи питания усилителя У1 и обмотки возбуждения двигателя. В результате сигнал 1 индуктивного датчика будет пропорционален отклонению Н зад от заданной высоты полета Нзад, равной высоте полета в момент 19 включения режима коррекции. Этот сигнал выдается потребителю в виде напряжений постоянного тока (в САУ) и переменного тока (в БСГ). ~36В 400Гц ~36В 400Гц =27В =27В Тр Рст 3В ИД α ЧЭ γ´ U~(ΔH) в САУ ФЧУ ΔU =27В Р1 ΔU У БСГ сигнал "отказа" "коре. прогр." ~36В 400Гц Р2 Р4 Р3 сигнал "готовност." В Д Р´ γ´ П Rн (H) в САУ Г Программ. устройст. Вкл. Р1 "коррекции" Вкл. Р2 "программы" Р4 Р3 Рис. 13. Структурная схема КЗВ В режиме работы от программного устройства корректор КЗВ позволяет доводить высоту полета до заданной по специальной программе. В этом режиме реле РЗ и Р4 отключают элемент ИД от усилителя У и подключают программное устройство. Потенциометр программного устройства (на схеме не показан) совместно с потенциометром П образует мостовую схему, выходной сигнал с которой 2 , пропорциональный разности программной и текущей высоты, поступает на усилитель У1. Поскольку следящая система будет поддерживать этот сигнал близким к нулю, то угол поворота вала двигателя, характеризующий значение Нкзв , а следовательно и положение статора ИД, будут соответствовать программному значению Нпр. Вследствие этого сигнал 1 , а значит и сигнал Uвых будут пропорциональны отклонению Н пр Н а Н пр . Частичный контроль правильности работы корректора осуществляется блоком сигнала готовности БСГ. В режиме обнуления признаком исправности следящей системы корректора КЗВ полагается выполнение условия Uвых < 9В. При этом срабатывает реле Р7, подключенное к выходному каскаду усилителя УЗ, собранному по схеме триггера. Через контакты Р7 в САУ будет подан сигнал готовности +27В, разрешающий включение режима стабилизации 20 высоты полета. Если Uвых превышает указанный уровень, триггер снимает напряжение с обмотки Р7 и сигнал готовности подаваться не будет. В этом случае через нормально замкнутые контакты Р7 предусматривается выдача сигнала "ОТКАЗ". КЗВ может также выдавать сигналы абсолютной высоты, необходимые в режиме программного управления высотой. Их можно использовать также для проверки корректора с помощью КПА. Температурная погрешность анероидной коробки компенсируется биметаллической скобой 6. Благодаря планке 7, жестко соединенной одним концом со скобой, при изменениях статического давления изменяется угол наклона скобы относительно анероида, а следовательно и составляющая температурного прогиба скобы вдоль оси перемещения подвижного центра анероида. В результате эта составляющая будет зависеть как от температуры, так и от давления, вследствие чего скоба позволяет осуществлять совместную компенсацию I и II рода. Максимальный выходной сигнал Uвых равен 20 В. Постоянная времени отработки следящей системы корректора при изменении высоты не превышает 0,15 с. Корректор-задатчик индикаторной (приборной) скорости КЗСП, подключаемый к системам статического и полного давления, выдает в САУ сигнал скорости Vпр и отклонения ΔVпр от заданного (постоянного) либо программного значения Vпр. Для вычисления Vпр используется формула Р 2 3 ,5 (6) 1 0 ,1333 10 3 Vпр д 1, Рс где Рс = 760 мм рт. ст. (1013 гПа). Корректор КЗСП по схеме и устройству ничем не отличается от корректора высоты КЗВ (рис. 12 и рис. 13), за исключением чувствителъного элемента, которым является манометрическая коробка. Его режимы работы, а также связи с блоком сигнала готовности БСГ и САУ аналогичны реализуемым в КЗВ. Диапазон измерения индикаторной скорости от 150 до 1300 км/ч. Зона нечувствительности не превышает ± 3 км/ч. 1.6. Погрешности СВС Методические погрешности СВС аналогичны погрешностям механических измерителей высоты и скорости. Истинная скорость V вычисляется по формуле (3) в зависимости от значений числа M и фактической температуры TТ, что исключает методическую погрешность измерения скорости V, присущую измерителям с косвенным учетом температуры по стандартной атмосфере. Инструментальные погрешности СВС объясняются погрешностями их элементов. Их подразделяют на статические и динамические. Статические погрешности складываются в основном из погрешностей от нелинейности 21 характеристик элементов и температурных погрешностей, вызванных влиянием температуры на ЧЭ, параметры электрических схем, счетно-решающих устройств. Погрешности от нелинейности характеристик элементов объясняются отклонением характеристик ЧЭ, функциональных потенциометров (в аналоговых электромеханических СВС), бесконтактных преобразователей ПНФ (в аналоговых электронных системах типа СВС-ПН) от заданных характеристик. Указанные погрешности устраняются путем регулирования отдельных узлов, а также с помощью лекальных корректоров. В целях уменьшения инструментальных температурных погрешностей используют дополнительные системы обогрева или вводят температурную компенсацию. Динамические погрешности СВС объясняются воздействием на элементы и узлы конструкции вибрации и линейных перегрузок, а также инерционностью датчиков температуры TТ , давлений Pст и Pд (Pп в цифровых СВС) и следящих систем. Для уменьшения влияния вибрации и перегрузок используют динамическую балансировку подвижных элементов и узлов, амортизацию блоков. 2. Аппаратура проверки систем воздушных сигналов АП-СВС-2 2.1. Назначение и технические данные Аппаратура проверки систем воздушных сигналов АП-СВС-2 предназначена для проверки на объекте следующих изделий: а) центральных систем воздушных сигналов ЦСВ-1М, ЦСВ-ЗМ и их модификаций; систем СВС-ПH-5, СВС-ПН-15 и их модификаций; систем СВС-1-72-1, СВСII72-2 и их модификаций; б) корректоров-задатчиков высоты и скорости КЗВ, КЗСП; в) блока истинной воздушной скорости БИВС (КП-6); г) аппаратура может применяться для проверки любых вновь разработанных приборов, имеющих аналогичное назначение и диапазон измерения. В состав аппаратуры АП-СВС (рис. 14) входят: измеритель воздушных давлений ИВД; измеритель выходных параметров ИВП; блок насосов установки УМАП; монтажные элементы. Вых ИВП Rт РП РД СВС РСТ ИВД РСТ Блок насосов УМАП Рз Рис. 14. Аппаратура проверки систем воздушных сигналов АП-СВС-2 22 Аппаратура обеспечивает: а) проверку точности электрических и визуальных выходов указанных изделий в лабораторных условиях, стационарных мастерских и на объекте без демонтажа. При этом ввод стимулирующих сигналов статического и полного давлений на объекте осуществляется непосредственно на вход поверяемых изделий с отключением их от бортовых приемников воздушных давлений, а проверка выходов для потребителей с отключением их от соответствующих потребителей; б) проверку на объекте без демонтажа работоспособности изделий при вводе стимулирующих сигналов статического и полного давлений через бортовые приемники; в) проверку напряжений питания проверяемых изделий. Технические данные 1. Питание блоков аппаратуры осуществляется постоянным током напряжением 24 В ÷ 29,4 В и переменным током напряжением 108 В ÷ 119 В частотой 380 Гц ÷ 420 Гц. 2. Мощность, потребляемая аппаратурой: а) блок ИВД-40ВА — по переменному току и 40 Вт — по постоянному току; 6) блок ИВП-50 ВА — по переменному току и 50 Вт — по постоянному току; в) блок насосов БН-М — не более 360 Вт по постоянному току. 3. Аппаратура работает в интервале рабочих температур от минус 30 до +50°С и после пребывания при предельных температурах минус 50 и +65°С в выключенном состоянии. 4. Аппаратура обеспечивает измерение и ввод в проверяемые изделия следующих исходных данных: а) абсолютного давления в диапазонах от 815 до 8 мм рт. ст абс. — по статическому давлению и от 8 до 2200 мм рт. ст. абс.— по полному давлению; б) избыточного давления от 0 до 1400 мм рт. ст.; в) сопротивлений, пропорциональных температуре торможения RТт от 0 до 311 Ом; г) относительных сопротивлений задатчика Roтн, при проверках указателей и корректоров-задатчиков от 0 до 100%; д) относительных сопротивлений, пропорциональных путевой скорости W от 0 до 100%. Примечание. Ввод в проверяемые изделия полного давления контролируется по показаниям указателей абсолютного и избыточного давления измерителя ИВД. 5. Аппаратура обеспечивает измерение следующих параметров, выдаваемых проверяемыми изделиями: а) относительного сопротивления от 0 до 100%; б) относительного напряжения переменного тока частотой 400 Гц от 0 до 100%; 23 в) выходных сигналов по напряжению постоянного тока от 0 до 30 В; г) выходных сигналов по напряжению переменного тока от 0 до 40 В; д) напряжения питания постоянного тока от 20 до 30 В; е) напряжения питания переменного тока частотой 400 Гц от 108 до 119 В; ж) относительного напряжения постоянного тока при опорном напряжении до 30 В. 6. Герметичность системы абсолютного давления ИВД такова, что при создании в ней давления 585, 175 и 8 мм рт. ст. абс. утечка не превышает 0,2 мм рт. ст. в течение 1 мин. по указателю ИВД. 7. Герметичность системы избыточного давления измерителя ИВД такова, что при создании в ней давления 195 мм рт. ст. утечка не превышает 0,2 мм рт. ст. в течение 1 мин. по указателю ИВД, а при создании давления 1400 мм рт. ст. 0,5 мм рт. ст. в течение 1 мин. 8. Измеритель ИВП, входящий в комплект аппаратуры, обеспечивает: а) питание потенциометрических выходов и указателей проверяемого изделия постоянным током напряжением 24 В ÷ 29,4 В; б) питание указателей проверяемого изделия и корректоров переменным током напряжением 36 В 12,,62ВВ частотой 380Гц ÷ 420 Гц и 28 В ± 10% частотой 380 Гц ÷ 420 Гц; в) сигнализацию замыкания контактов системы ЛПД (линия передачи данных), блоков БКМЭ и БСГ и указателей числа М СВС при Мкр; г) усиление сигнала, подаваемого на вход усилителя, и выдачу его с нагрузки в соответствии с табл. 1. Таблица 1 Выходные сигналы ИВП Напряжение, подаваемое на вход усилителя 7УП, в мВ Напряжение, снимаемое с нагрузки, в вольтах (не менее) Напряжение, подаваемое на вход усилителя УСО-2, в мВ Напряжение, снимаемое с нагрузки в вольтах (не менее) 20 100 400 0,8 -4 8 10 30 10 16 9. Порог чувствительности измерителя ИВП при проверке корректоров не превышает 200 мВ по постоянному току и 300 мВ по переменному току. 10. Шланги монтажных комплектов герметичны при создании в них давления, равного 2 атм. 11.Сопротивление изоляции электрических цепей блоков аппаратуры относительно корпуса и жгутов монтажных комплектов 24 относительно корпуса их разъемов при нормальной температуре ( + 25±10°) и относительной влажности 65±15% — не менее 20 МОм, а при температуре +25±3°С и относительной влажности 95±3% — не менее 1 МОм. 12. Масса блоков аппаратуры не превышает: а) измерителя ИВД — 23 кг; б) измерителя ИВП — 15 кг; в) блока насосов БН-М вар. 1 —19 кг. Примечания: По заказам организации заказчика и МГА аппаратура комплектуется двумя монтажными комплектами для проверки изделий «на» и «вне» объекта. 2.2. Устройство и работа аппаратуры Структурная схема проверки системы воздушных сигналов аппаратурой АП-СВС-2 представлена на рис. 15. Проверка осуществляется путем: а) ввода в проверяемые изделия стимулирующих сигналов статического Рст (абсолютного) и полного Рп давлений, а также электрических стимулирующих сигналов (сопротивлений имитатора температуры Тт, имитатора путевой скорости W); б) измерения на выходе систем сигналов, пропорциональных проверяемым параметрам. Измерение и ввод в проверяемые изделия статического Рст (абсолютного) и полного Рп давлений осуществляет измеритель воздушных давлений ИВД, в который подается давление от блока насосов. Измерение выходных сигналов, контроль напряжений в цепях питания и ввод электрических стимулирующих сигналов осуществляет измеритель выходных параметров ИВП. Связь блоков аппаратуры между собой, с различными проверяемыми изделиями и источниками питания осуществляется при помощи соответствующих монтажных комплектов. Состав и назначение каждого монтажного комплекта определяется: а) типом проверяемой системы; б) видом контроля изделия (на объекте, вне объекта). Таким образом, при различных видах контроля различных изделий в процессе проверки в каждом случае участвуют универсальные блоки ИВД, ИВП, блок насосов и один монтажный комплект, применяемый для контроля конкретного изделия. 25 Рис. 15. Структурная схема проверки СВС - ПН -15 аппаратурой АП-СВС-2 Питание измерителя ИВП постоянным током напряжением 27 В и переменным током напряжением 115 В частотой 400 Гц осуществляется через контакты штепсельных разъемов Ш1 и Ш2 (рис. 16). Принципиальная схема блока включает в себя: а) Автоматическое цифровое отсчетное устройство (индикатор выходных параметров и напряжений питания). б) Схему преобразования напряжений (при проверках напряжений питания, корректоров, выходов ΔM). в) Схему контроля указателей отдельно от системы. г) Имитаторы задатчиков температуры торможения Тт и путевой скорости W. д) Схему коммутации. Для индикации выходных параметров и напряжений питания измеритель ИВП имеет универсальный электромеханический указатель (УК-1). 26 В6 В7 В5 УК-1 R13 В12 Рис. 16. Внешний вид ИВП Проверяемый элемент, с которого снимается измеряемый сигнал, образует компенсационную самобалансирующуюся схему с измерительным плечом отсчетного устройства, образованного двумя потенциометрами, включенными параллельно для повышения точности измерения. Применяемый в следящей системе отсчетного устройства полупроводниковый усилитель, работающий на обмотку управления двигателя, осуществляет компенсацию реактивной составляющей входного сигнала, что позволяет построить следящую систему на переменном токе с высокой точностью. Указанное универсальное отсчетное устройство включается в измерительную схему изменением положения щеток переключателей В6 («Проверка»), В5 («Изделия»), В12 («Выходы 1»), В7 («Выходы 2») и включением ряда выключателей (при проверках корректоров высоты и скорости, и выхода ΔМ) рода напряжения выхода корректора — ВЗ, полярности выхода корректора — В2, полярности выхода ΔМ — В4, источника опорного напряжения тока — В14, постоянного тока — В15. Схема коммутации включения механизма отсчетного устройства указателя УК1 в измерительную схему соответствует определенному положению переключателей В6 («Проверка»); В5 («Изделия») и В12 («Выходы 1»). При измерении напряжений постоянного и переменного тока измеряемые напряжения подаются на вход усилителя через соответствующие делители и вибропреобразователь, при этом измерение переменных напряжений частотой 400 Гц осуществляется после их предварительного выпрямления. 27 Параметры делителей подобраны таким образом, что измеряемые напряжения читаются по шкале указателя без переводных коэффициентов (кроме напряжения питания ~115 В 400 Гц, где коэффициент — Vx10). Сигналы переменного напряжения ΔМ поступают в измерительную схему после прохождения через фазочувствительный выпрямитель. Измерение относительных напряжений производится при запитке потенциометров отработки переменным опорным напряжением 15В 400 Гц от трансформатора ТрЗ. Величина относительного напряжения определяется как отношение измеряемого напряжения к опорному. При измерении относительных сопротивлений запитка потенциометра отработки и выходных потенциометров проверяемых изделий производится переменным напряжением 28В 400 Гц от внутреннего источника понижающего трансформатора Тр1. При проверке указателей отдельно от системы и корректоров-задатчиков высоты и скорости потенциометры указателя УК1 служат задатчиком относительного сопротивления. Необходимое изменение положения щеток потенциометров П1 и П2 достигается изменением вручную положения щеток переменного сопротивления R13 («Ввод Roтн»). Ввод в изделия сопротивлений, пропорциональных температуре торможения Тт, осуществляется с помощью трехдекадного встроенного магазина сопротивлений, с помощью которого можно набрать сопротивления от 0,1 до 111 Ом ступенями через 0,1 Ома. С помощью переключателя В11 в общую цепь можно дополнительно включить сопротивление 100 и 200 Ом и, таким образом, расширить предел вводимых сопротивлений до 311 Ом. Ввод относительных сопротивлений, пропорциональных путевой скорости W, производится с помощью переключателя В7 («Выходы 2»). Проверка срабатывания контактов линии передачи данных ЛПД осуществляется при помощи сигнальной лампы Л8, блока сигнала готовности БСГ — при помощи сигнальной лампы ЛЗ, блока коррекции числа М БКМЭ – при помощи сигнальной лампы Л6, указателей числа М при достижении Мкр — при помощи сигнальной лампы Л7. Связь блока ИВП с проверяемыми системами осуществляется через разъемы Ш4, Ш5, Ш6. Проверка корректоров и указателей отдельно от системы производится через разъем Ш3. При комплексной проверке работоспособности изделий без демонтажа с объекта ввод сопротивлений R осуществляется через разъем Ш6. Для обеспечения возможности проверок изделий в ночное время служат лампы подсвета шкалы указателя Л4 и Л5, включаемые переключателем В13 («Свет»). Конструктивно измеритель ИВП выполнен в виде отдельного блока (рис. 17), состоящего из корпуса и крышки. 28 2 4 3 1 Рис. 17. Измеритель воздушных параметров Внутри корпуса смонтирована панель 1, которая крепится к корпусу при помощи винтов. Головка одного из винтов имеет пломбировочную чашку и опломбирована пломбой изготовителя. На панели смонтированы указатель 2 и ряд элементов схемы, определяющих функции и назначение блока. На корпусе измерителя имеются резиновые амортизаторы, защищающие покрытие корпуса от износа и загрязнения. На панели 1 смонтирован указатель измеряемых параметров 2 и вводимых в проверяемые приборы относительных сопротивлений 3, а также все элементы электрической схемы блока. Электрическое питание подается к измерителю через штепсельные разъемы Ш1, Ш2 и Ш3. Электрическая связь с проверяемым изделием осуществляется через штепсельный разъем Ш4. Для защиты электрической схемы от коротких замыканий предусмотрены предохранители 0,5А и 2А, установленные в держателях и закрытые легкосъемными колпачками, позволяющими производить смену предохранителей. Включение блока осуществляется двухполюсным переключателем «Питание». Выключатель «Свет» 4 предназначен для включения светильника, обеспечивающего подсвет циферблата указателя. Для подготовки блока к работе и управления процессом проверки на панели 1 смонтированы 4 переключателя и 2 выключателя. 29 Вид проверки изделий определяется положением переключателей «Проверка», «Изделия», «Выходы 1», «Выходы 2», "Ввод Roтн» выключателей. «Проверка корректоров» и «ΔМ, ΔН Проверка». Кроме проверки выходов и напряжений, измеритель ИВП может задавать в виде относительных сопротивлений значения путевой скорости W и температуры торможения Тт, что осуществляется при помощи переключателей «Выходы 2» и «Задатчик RТт». Фонари ЛПД, ВСГ сигнализируют о срабатывании контактов при проверке линии передачи данных ЛПД, блока готовности ВСГ и блока коррекции числа М БКМЭ. Фонарь «Мкр» сигнализирует о срабатывании контактов указателей числа М при достижении Мкр. Указатель 2 является универсальным индикатором блока и состоит из узлов и деталей, смонтированных в корпусе и имеющих кинематическую и электрическую связь между собой. Корпус с лицевой стороны закрыт фланцем со стеклом, который крепится к корпусу винтами. В местах сочленения стекла, корпуса и фланца проложены прокладки, обеспечивающие плотность соединения. Конструктивно механизм указателя выполнен из узлов и деталей, смонтированных на платах и крышке. Основными узлами механизма являются: счетчик, редуктор, потенциометры, двигатель и ряд других элементов. 3. Описание лабораторного стенда В комплект лабораторного стенда входят: - вычислитель скорости, числа М и высоты ВСМВ-1-15; - указатель высоты УВ0-15К с блоком питания БПУ-3; - указатель скорости УСВПк с блоком питания БПУ-3; - указатель числа М УМ-1К -0,82 с блоком питания БПУ-3; - блок преобразования, потенциометрический На ВПнП-2; - блок преобразования потенциометрический Н БПнП-4; - блок преобразования потенциометрический V БПнП-10; - блок питания БП-27-2; - блок корректора числа М БКМЭ; . - фильтр Ф-115-1; - блока предохранителей БПр-1; - измеритель выходных параметров ИВП; - измеритель воздушных давлений ИВД; - КПА ПВД. Общий вид лабораторного стенда изображен на рис. 18. Блоки и указатели системы СВС-ПН-15 установлены на лабораторном стенде согласно блочной схеме (рис. 15). 30 Рис. 18. Общий вид лабораторного стенда 4. Порядок выполнения работы 4.1. Подготовка лабораторного стенда к работе и его включение Перед проведением экспериментальной части необходимо подготовить и СВС-ПН-15 и АП-СВС-2 к работе, для этого: 1. Установить все органы управления измерителей ИВД и ИВП в исходное положение согласно табл. 2. Все тумблеры блока предохранителей БПр-1 установить в исходное положение «Выключено». 2. Включить питание лабораторного стенда, установив тумблеры блока предохранителей БПр-1 в положение «Вкл», кроме тумблера «Самоконтроль», и проверить напряжения питания, установив соответствующие переключатели и тумблеры ИВП в положение согласно табл. 2. 3. С помощью шлангов подключить «Вакуумный насос Вход» и «Компрессор Выход» блока насосов КПА-ПВД к штуцерам «Вакуум» и «Давление» блока ИВД соответственно без подключения шлангов к штуцерам Рс и Рд измерителя ИВД. «Выходы 1» «Проверка» «= » «Проверка ΔМ, ΔН» «Проверка корректоров» Тумблер «питание» 1 «Выходы 2» 1 0 Тумблер «=Vx1» «~» «Откл.» «=Vx1» «Вкл.» «Атм.» «Соединительный» Закрыт «Давление» Закрыт «Вакуум» Рд Закрыт 1200 Vст «Макс.» Тумблер питания Откл. Проверка напряжения питания ~ 115 В, 400 Гц «Изделия» 1 Задатчик RТт 50 50 0 «Ввод Rотн.» Проверка напряжения питания – 27 В Тумбле ры «U» опорн. ИВП Переключатели Исходное состояние блоков перед работой Наименование операции Перекл ючатель Краны ИВД Положение органов управления Положение органов управления измерителей ИВД и ИВП при проведении проверок ~115 ± 4,6 В 27 ± 2,5 В Показания указателя измерителя ИВП Таблица 2 31 В среднее положение «~Vx10» «Внутр.» «Внутр.» «Меньше» «Меньше» «=» «Вкл.» Закрыт 32 4. Включить тумблер питания ИВД, открыть кран «Соединительный». Вращением кранов «Вакуум» и «Давление» измерителя при заглушенных штуцерах Рс и Рд произвести изменение показаний указателей абсолютного давления от 815 до 18 мм рт. ст. абс. и обратно. 5. Закрыть кран «Соединительный», открыть кран «Атм-В». Вращением крана «Давление» произвести изменение показаний указателя избыточного давления от 0 до 200 мм рт. ст., после чего произвести обратное изменение давления вращением крана «Соединительный». Открыть штуцер сброса «Сброс». Открыв краны «Атм.» и «Соединительный», выровнять давления в статической и динамической системах измерителя ИВД с атмосферным давлением. Закрыть краны «Вакуум», «Давление» и «Атм.» измерителя ИВД, ручку крана предохранительного «Уст.» установить в положение «Макс», ручку крана предохранительного «Рд» - в положение «1400». Заглушить штуцеры Рст и Рд.Соединить блок насосов и измеритель ИВД с источниками электрического питания. Выключатель электропитания ИВД установить в положение «Вкл.». Подключить магистрали вакуума и давления блока КПА-ПВД к соответствующим штуцерам ИВД. Заданные значения статического давления Рст устанавливают плавным вращением кранов «Вакуум», «Давление» и «Атм.» измерителя ИВД при открытом кране «Соединительный». Задаваемое значение статического давления контролируют по указателям абсолютного давления ИВД. Медленно открывая кран «Вакуум» блока ИВД, производят изменение показаний указателей абсолютного давления от давления дня до 8 мм рт. ст. абс. Закрывают кран «Вакуум». Медленно открывая ручку «Атм.» крана «Вакуум», изменяют показания указателей от 8 мм рт. ст. абс. до давления дня. Медленно вращая ручку крана «Давление», изменяют показания указателя ИВД от давления дня до 815 мм рт. ст. абс. Закрывают кран «Давление». Вращением ручки «Атм.» крана «Вакуум» изменяют показания указателя от 815 мм рт. ст. абс. до давления дня. Заданные значения динамического давления Рд устанавливают вращением кранов «Давление» и «Атм.» при закрытом кране «Соединительный». Регулируемые значения динамического давления контролируют по указателям избыточного давления измерителя ИВД. Медленно открывая кран «Давление», производят изменение показаний указателей избыточного давления от минимального до максимального значения. Закрывают кран «Давление». Медленно вращая ручку «Атм.» крана «Давление», изменяют показания указателей от максимального до минимального значения. Установку необходимых значений Рст и Рд производят с учетом градуировочных значений блока ИВД, которые для любых давлений, требуемых для проверки приборов, могут определяться: 33 а) непосредственной градуировкой ИВД на точках, используемых для проверки; б) расчетным путем линейной интерполяции относительно опорных точек. В этом случае расчет проводится эксплуатирующими организациями (с занесением результатов расчета в градуировочные таблицы) и установку давления, отличного от указанного в таблице, производят с учетом отклонения градуировочного значения от действительного значения измеряемого давления для ближайшего значения таблицы. Пример. Необходимо установить абсолютное давление 580,2 мм рт. ст., по табл. 3 читаем: Таблица 3 Соответствие показаний указателя ИВД стандартной атмосфере Давление стандартная атмосфера 579 580 581 582 показания указателя 581,4 582,3 583,2 584,1 Ближайшее значение по таблице будет 580 мм рт. ст. абс, при задании которого указатель абсолютного давления будет показывать 582,3 мм рт. ст. абс. Разница между требуемым давлением и ближайшим значением по таблице составит 580,2-580 = 0,2 мм рт. ст. Для задания давления 580,2 необходимо установить по индикатору указателя показание 582,3 +0,2 = 582,5 мм рт. ст. абс. Аналогично устанавливаются требуемые значения избыточного давления. Устанавливаемые значения Рст и Рд должны поддерживаться в течение времени, необходимого для снятия показаний приборов на объекте и проведения необходимых работ. Необходимая подрегулировка давлений Рст и Рд в процессе работы производится вращением кранов «Вакуум», «Давление», «Атм.». 4.2. Определение погрешностей визуальных и потенциометрических выходов ВНИМАНИЕ! При выключенном электропитании и Нотн. > 10000 м запрещается вращать ручку Рз указателя УВО-15М1. а) Открыть кран «Соединительный», закрыть все остальные краны и, сняв заглушки со штуцеров ИВД, надеть шланги на штуцера Рс и Рд по схеме проверки. 34 б) Счетчик барометрического давления указателя УВО-15(к) кремальерой Рз установить на отметку 760 мм рт. ст. в) Согласно карточки-задания для трех точек поверочных таблиц установить соответствующие значениям высоты (табл. 4) , скорости (табл. 5), числа М (табл. 6) значения стимулирующих сигналов воздушных давлений Рс и Рд по указателям измерителя ИВД. Таблица 4 Допустимые инструментальные погрешности указателя УВО-15М1 и выходов БПнП-2 для Набс и БПнП-4 для Нотн Проверяемые значения высоты Рз = 760 мм рт.ст. Допустимые погрешности выходов Нотн при 250С Визуальный в метрах Набс при 250С Нотн Набс в метрах Номинальные значения отн. сопротивления в% Потенциометр. в % отн. сопротивления Набс Нотн Rп4 Rп4 0 500 Нотн Rп2 Rп3 Rп5÷ Rп7 0 3,75 10 12,66 ±0,15 ±5 1000 6,5 15,33 ±10 ±0,1 ±0,05 ±0,06 2000 3000 13,0 19,5 20,66 26 ±12 5000 13000 32,5 84,5 36,67 79,33 ±15 ±0,08 ±0,15 Потенциометр. в % отн. сопротивления Rп2,Rп3 Rп5 Rп5,Rп6 Rп7 ±0,1 Rп4 Rп7 Rп2 Rп3 Rп6 ±0,1 ±0,15 ±0,05 ±0,06 ±0,1 ±0,3 ±0,08 ±0,15 ±0,2 ±0,3 г) Переключателями «Задатчик RТ» измерителя ИВП установить необходимое значение сопротивления имитатора приемника температуры торможения согласно проверяемой точке поверочной таблицы. ПРИМЕЧАНИЕ. Перед установлением каждой последующей проверяемой точки переключатель «Изделия» измерителя ИВП установить в положение «5». д) Отсчитать значения визуальных выходов Нотн, Vист.., числа М по указателям УВО-15 (к), УСВП (к), УМ-1 (к) нa проверяемой точке. Результаты измерения занести в табл. 9, 10 и 11. 35 Таблица 5 Допустимые инструментальные погрешности указателя УСВПк и выходов БПнП-10 для Vист Показания указателя Vист, км/ч 200 300 500 800 1000 Номинальные Допустимые погрешности выходов значения отн. Визуальный Потенциометр. в % отн. сопротивления в км/ч сопротивления в% Rп2 Rп5 Rп5 Rп2÷Rп4, Rп6, Rп3 Rп7 Rп7 0 0 0 Rп4 +25, -60 С +25 С -30 С +250С -300С Rп6 -30 и +600С 15,0 5,0 ±0,15 22,5 7,5 37,5 12,5 ±5 ±10 ±0,2 ±0,2 ±0,3 60,0 20,0 ±0,1 75,0 25,0 Таблица 6 Допустимые инструментальные погрешности указателя УМ-1к и выходов числа М Показания числа М 0 0,3 0,4 0,5 0,6 0,7 0,8 0,9 1,0 Номинальные Допустимые погрешности выходов значения отн. Визуальный Потенциометр. в % отн. сопротивления сопротивления на выходе +250 С +600С -600С +250С +600С числа М в % -300С -300С -600С 5 32 41 +0,005 50 59 0,005 +0,01 ±5 ±5 68 77 +0,003 86 +0,005 е) Изменяя положение переключателей «Проверка», «Изделия», «Выходы 1», отсчитать показания указателя ИВП, соответствующие значениям высоты Нотн, Набс, Vист.., числа М по всем потенциометрическим выходам (табл. 7). Результаты измерения занести в табл. 12, 13 и 14. 36 Таблица 7 Положение переключателей на ИВП для проверяемых выходов Проверяемые выходы Rп2 Rп3 Rп4 Rп5 Rп6 Rп7 Rп2 Rп3 Rп4 Rп5 Rп6 Rп7 Rп2 Rп3 Rп4 Rп5 Rп6 Rп7 Rп2 Rп3 Rп4 Rп5 Rп6 Rп7 Нотн БПнП-4 Набс БПнП-2 Vист БПнП-10 М Положение переключателей на ИВП «Проверка» «Изделия» «Выходы 1» 1 2 3 4 5 6 5 7 8 9 10 11 12 1 2 R% 3 4 5 6 6 7 8 9 10 11 12 ж) Величину погрешности визуальных выходов Нотн, Vист.. и числа М на каждой проверяемой точке определить как разность между фактическим показанием указателей УВО-15 (к), УСВП (к), УМ-1 (к) и номинальным значением показаний, указанных в поверочных табл. 4-6. Результаты вычисления занести в табл. 9, 10 и 11. з) Величину погрешности каждого потенциометрического выхода Нотн, Набс, Vист.., числа М на каждой проверяемой точке определить как разность между величиной относительного сопротивления, замеренного по п. «е» и соответствующей расчетной величиной, указанной в поверочных табл. 4 - 6. Результаты вычисления занести в табл. 12, 13 и 14. Погрешность при этом не должна превышать допустимых величин, указанных в поверочных таблицах. и) Счетчик барометрического давления указателя УВО-15 (к) поочередно установить на деления 806,1; 716,0; 674,1; 596,3; 525,9 мм рт. ст. и, создавая давления в статической системе проверяемого изделия, соответствующие -500, 37 1000, 2000 и 3000 м высоты, определить погрешность визуальных выходов Нотн на уровне земли при давлениях, отличных от 760 мм рт. ст., используя табл. 8. Результаты измерений и вычислений занести в табл. 15. Таблица 8 Допустимые инструментальные погрешности указателя УВО-15М1 для Нземли Рз в мм рт.ст. 806,1 716,0 674,1 596,3 525,9 Проверяемые значения высоты при Нотн=0 в % относительного сопротивления Нзем Набс 0 7,33 25 12,67 37,5 15,33 62,5 20,67 87,5 26 Допустимые погрешности потенциометрических выходов в % относительного сопротивления Нзем Набс ±0,1 ±0,12 ±0,11 После проверки счетчик указателя УВО-15 (к) установить в положение 760 мм рт. ст. Для проверки встроенного контроля системы необходимо установить тумблер «Самоконтроль» на блоке БПр-1 в положение «Вкл». При этом показания указателей должны соответствовать следующим значениям: УВО 15 - Нотн = 12000±40м, УМ-1к - число М=0,8±0,01, УСВПк Vист=900±10км/ч. Таблица 9 Проверяемые значения высоты Рз = 760 мм рт.ст. при 250С Нотн, м Допустимые погрешности выхода УВО-15 ΔНотн, м Показания указателя УВО-15 Вычислено Нотн, м ΔНотн, м Таблица 10 Проверяемые значения истинной скорости при t = Vист, км/ч Допустимые погрешности выхода УСВПк Δ Vист, км/ч Показания указателя УСВПк Вычислено Vист, км/ч Δ Vист, км/ч 38 Таблица 11 Проверяемые значения числа М при t = М Допустимые погрешности выхода УМ-1к ΔМ Показания указателя УМ-1к Вычислено М ΔМ Таблица 12 Проверяемые Номинальные значения высоты значения отн. Рз = 760 мм рт.ст. сопротивления при 250С в% Нотн, м R% Допустимые погрешности выхода БПнП-4 Δ R% Показания указателя ИВП Вычислено R% Δ R% Таблица 13 Проверяемые значения истинной скорости при t = Vист, км/ч Номинальные значения отн. сопротивления в% Допустимые погрешности выхода БПнП-10 Показания указателя ИВП Вычислено R% Δ R% R% Δ R% Таблица 14 Проверяемые Номинальные значения числа М значения отн. при t = сопротивления на выходе числа М в % М R% Допустимые погрешности выхода числа М Показания указателя ИВП Вычислено Δ R% R% Δ R% 39 Рз в мм рт.ст. Допустимые погрешности выхода УВО-15 ΔНзем, м ±15 ±10 ±15 ±20 ±20 806,1 716,0 674,1 596,3 525,9 Показания указателя УВО-15 ΔНабс, м ±15 Нзем, м Набс, м Таблица 15 Вычислено ΔНзем, м ΔНабс, м ±20 ±30 ±40 4.3. Определение погрешности указателя УСВП (к) штурмана при изменении путевой скорости а) На указателе УСВП (к) штурмана переключатель установить в положение «ПУТ». б) На измерителе ИВП установить переключатель «Проверка» в положение «R%», «Выходы 2» - в положение «2», «Изделия» - в положение «5», «Выходы 1» - в положение «1». в) Установить тумблер «Питание» ИВП в положение «Вкл.». г) Установить переключатель «Выходы 2» поочередно в положения согласно табл. 16 проверить отрабатываемые указателем УСВП(к) значения скорости. д) Определить погрешность отработки W как разность между показанием указателя УСВП (к) и соответствующим проверяемым значением путевой скорости, указанным в табл. 16 и результат занести в табл. 16. Погрешность при этом не должна превышать величины, указанной в табл. 16. Таблица 16 Погрешность указателя УСВП (к) Положение переключателя «Выходы 2» 2 3 4 5 6 Значение путевой скорости, км/ч 300 500 800 1000 1200 Показания указателя УСВП (к) Погрешность указателя УСВП (к) Допуск в км/ч при Т = +25°С ±10 40 4.4. Определение погрешности выхода ΔМ а) На измерителе ИВП установить переключатели: - при измерении ΔМ по переменному току: «Проверка» — в положение «V = ΔM, ΔН»; «Изделия» — в положение «2»; «Выходы 1» — в положение «10»; Тумблер «ΔМ, ΔН Проверка» — в положение «больше»; - при изменении ΔМ по постоянному току: «Проверка» — в положение «V = ΔM, ΔН»; «Изделия» — в положение «2»; «Выходы 1» — в положение «12»; «Выходы 2» — в положение «11», что соответствует положению «больше». б) Открыв кран «Соединительный» измерителя ИВД, одновременно в статической и динамической системах проверяемого изделия создать давление, соответствующее первой проверяемой точке табл. 17. Таблица 17 Допустимые значения на выходах ΔМ Значения числа М Значения в ед. числа М ΔМ в ед. числа М 0,3 -0,15 0 0,4 +0,15 0,6 0,8 -0,15 -0,1 -0,05 0 +0,05 +0,1 +0,15 Допустимые значения на выходах ΔМ в нормальных климатических условиях по переменному току по постоянному току -20±7 В -12±4 В ±0,008М ±0,008М +20±7 В +12±4 В -20±7 В -12±4 В -13,2±4,6 В -8±2,6 В -6,6±2,3 В -4±1,3 В ±0,008М ±0,008М +6,6±2,3 В +4±1,3 В -13,2±4,6 В +8±2,6 В +20±7 В +12±4 В в) Закрыть кран «Соединительный», в динамической системе создать давление, соответствующее числу М, равному 0,5 ед. на высоте 5 км. г) Установить переключатель «Изделия» ИВП в положение «4». Отсчитать по указателю ИВП величину напряжения нулевого сигнала ΔМ. Величина нулевого сигнала ΔМ, пересчитанная в единицах числа М, не должна превышать расчетной величины, указанной в поверочной табл. 17. д) Краном «Давление» в динамической системе СВС установить значение Рд = Рп - Рс, соответствующее заданному приращению числа М + 0,15 ед. 41 е) Отсчитать по указателю ИВП значение Uизмер, фактическое напряжение выхода ΔМ по переменному току определить по формуле: Uфакт = 1,3 Uизмер, фактическое напряжение выхода ΔМ по постоянному току Uфакт = Uизмер. Определить погрешность выхода ΔМ. ж) При проверке ΔМ по переменному току установить тумблер «ΔМ, ΔН Проверка» в положение «меньше»; при проверке ΔМ по постоянному току переключатель «Выходы 2» установить в положение «12», что соответствует положению «меньше». з) Краном «Давление» в динамической системе установить значение Рд = Рп - Рс, соответствующее заданному уменьшению числа М (- 0,15 ед. на высоте 5 км). и) Повторить п. «е». к) По методике п.п. «а», «б», «в», «г», «д», «е», «ж», «з», «и» определить напряжение при ΔМ = 0 и рассогласовании на ΔМ = ±0,15 ед. числа М при М = 0,8 ед. числа М на высотах 5 км, 10 км и 14 км. При этом погрешности ΔМ на каждой проверяемой точке, при измерении по постоянному или по переменному току не должны превышать расчетных величин, указанных в поверочной табл. 17. ПРИМЕЧАНИЕ. Напряжение на выходе ΔM по переменному току измеряется по постоянному току с помощью дополнительного фазочувствительного выпрямителя ФЧВ блока ИВП. Фактическая величина нулевого сигнала ΔM в ед. числа М определяется по формуле: 0 ,15 U нул М ед. М, U изм U нул где Uизмер - измеренная величина напряжения в вольтах при ΔM = 0,15 ед. числа М; Uнул - измеренная величина напряжения в вольтах при нулевом сигнале. 4.5. Проверка герметичности системы статического и полного давления Герметичность статической системы проверяют путем одновременного создания в статической и динамической системах давления 400 мм рт. ст. абс. При достижении указанного давления источник давления (разрежения) перекрывают и в течение 1 мин. наблюдают за изменением показания указателя ИВД. Изменение давления при этом не должно превышать 2 мм рт ст. Герметичность системы полного давления проверяется путем создания в ней давления 440 мм рт. ст., контролируемого по указателям измерителя ИВД. 42 При достижении указанного давления краны ИВД закрыть и в течение 1 мин. наблюдать за изменением показаний указателя ИВД. Изменение давления при этом не должно превышать 1 мм рт. ст. 4.6. Выключение лабораторного стенда Для окончания работы выровнять давление в воздушных системах с атмосферным, открыв краны «Соединительный» и «Атм.», закрыть все краны блока и насосов и краны «Давление», «Вакуум», «Атм.» измерителя ИВД. Выключить электропитание блока КПА-ПВД и измерителя ИВД. Разобрать схему проверки. 5. Требования, предъявляемые к отчету Отчет по лабораторной работе должен содержать: 1. Название лабораторной работы. 2. Цель лабораторной работы. 3. Основные технические характеристики СВС-ПН-15. 4. Таблицы, указанные в разделе 4. 5. Выводы по проделанной работе. 6. Контрольные вопросы 1. Назначение системы воздушных сигналов СВС-ПН-15. 2. Комплект СВС-ПН-15. 3. Основные технические данные СВС-ПН-15. 4. Основные погрешности СВС. 5. Назначение вычислителя скорости, числа М и высоты BCMB-1. 6. Реализация нелинейных зависимостей в ПНФ. 7. Назначение блоков преобразования напряжения БПнП и коррекции числа М БКМЭ. 8. Принцип работы корректора-задатчика высоты КЗВ-0-15 и индикаторной (приборной) скорости КЗСП. 9. Методика выполнения экспериментальной части лабораторной работы. 43 Литература 1. Воробьев В.Г. и др. Авиационные приборы, информационноизмерительные системы и комплексы; Под ред. В.Г.Воробьева. – М.: Транспорт, 1992. 2. Авиационные приборы и навигационные системы; Под ред. О.А.Бабича. – М.: ВВИА, 1981. 3. Попов В.М., Шипилов В.В. Авиационные приборы и высотное оборудование. - Иркутск: ИВАИИ, 1999. 4. Техническое описание и инструкция по эксплуатации СВС-ПН-15. 44 Содержание Лабораторная работа «Исследование характеристик системы воздушных сигналов СВС-ПН-15» . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 1. Назначение и устройство системы воздушных сигналов СВС-ПН-15 . . . 3 1.1. Назначение и комплект СВС-ПН-15. . . . . . . . . . . . . . . . . . . . . . . . . . . 1.2. Основные технические данные СВС-ПН-15 . . . . . . . . . . . . . . . . . . . . 1.3. Вычислитель скорости, числа М и высоты BCMB-1 . . . . . . . . . . . . . 1.4. Блоки преобразования напряжения БПнП и коррекции числа М БКМЭ . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.5. Корректор-задатчик высоты КЗВ-0-15 и индикаторной (приборной) скорости КЗСП . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 1.6. Погрешности СВС . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 3 5 5 15 17 20 2. Аппаратура проверки систем воздушных сигналов АП-СВС-2 . . . . . . . 21 2.1. Назначение и технические данные . . . . . . . . . . . . . . . . . . . . . . . . . . . . 2.2. Устройство и работа аппаратуры . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 21 24 3. Описание лабораторного стенда . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 29 4. Порядок выполнения работы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 30 4.1. Подготовка лабораторного стенда к работе и его включение . . . . . 4.2.Определение погрешностей визуальных и потенциометрических выходов . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.3. Определение погрешности указателя УСВП(к) штурмана при изменении путевой скорости . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.4. Определение погрешности выхода М . …. . . . . . . . . . . . . . . . . . . . . 4.5. Проверка герметичности системы статического и полного давления . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 4.6. Выключение лабораторного стенда . . . . . . . . . . . . . . . . . . . . . . . . . . 30 5. Требования, предъявляемые к отчету . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42 6. Контрольные вопросы . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 42 Литература . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 43 33 39 40 41 42