task_16480x
advertisement

УДК 681.51 (07)
Р 851
№
МИНИСТЕРСТВО ОБРАЗОВАНИЯ И НАУКИ
РОССИЙСКОЙ ФЕДЕРАЦИИ
_____________
ТЕХНОЛОГИЧЕСКИЙ ИНСТИТУТ
ЮЖНОГО ФЕДЕРАЛЬНОГО УНИВЕРСИТЕТА
______________________________________________
Руководство
к лабораторной работе
Синтез алгоритмов цифрового управления на основе
дельта-преобразований второго порядка и разработка
программной модели системы
по курсу
ЦИФРОВОЕ УПРАВЛЕНИЕ, СЖАТИЕ И ПАРАЛЛЕЛЬНАЯ
ОБРАБОТКА ИНФОРМАЦИИ НА ОСНОВЕ ДЕЛЬТАПРЕОБРАЗОВАНИЙ ВТОРОГО ПОРЯДКА
Для студентов специальностей 230105, 010503, магистерских
программ 552801, 552805
Таганрог 2010
1
УДК 681.51 (07)
Составители: П.П. Кравченко, И.С.Павлова
Руководство к лабораторной работе «Синтез алгоритмов цифрового
управления на основе дельта-преобразований второго порядка и разработка
программной модели системы» по курсу «Цифровое управление, сжатие и
параллельная обработка информации на основе дельта-преобразований второго
порядка». Таганрог: Изд-во ТТИ ЮФУ, 2010. с.
Предназначено для студентов специальностей 230105, 010503 и
магистерских программ 552801, 552805, изучающих курс "Цифровое
управление, сжатие и параллельная обработка информации на основе дельтапреобразований второго порядка". Содержит описание лабораторной работы,
целью которой является синтез алгоритма управления линейным или
нелинейным объектом с использованием дельта-преобразований второго
порядка, разработка программной модели системы управления и проведение
экспериментальных исследований с использованием модели.
Ил. 11. Библиогр.: 2 назв.
Рецензент А. Р. Гайдук, д-р. техн. наук, профессор кафедры САУ ТТИ ЮФУ.
ВВЕДЕНИЕ
Рыночный интерес к продукции вычислительной техники, программного
обеспечения и средств управления определяется, в первую очередь,
техническими характеристиками этой продукции и стоимостью. В настоящее
время совершенствование указанных показателей на основе традиционных
методов оказывается все более проблематичным. Необходимы поиски новых
теоретических подходов и решений. Особый интерес при этом представляют
такие теоретические направления, результаты исследований которых имеют, по
крайне мере, в определенной степени универсальный характер и могут быть
использованы в различных областях науки и техники.
К
таким
«универсальным»
направлениям
относится
теория
оптимизированных
дельта-преобразований
(Д-преобразований)
второго
порядка. В работах [1, 2] можно ознакомиться с возможностями использования
дельта-преобразований второго порядка для сжатия функций и сигналов,
алгоритмизации некоторых параллельных вычислительных процессов для
специализированных
процессоров,
синтеза
алгоритмов
цифрового
автоматического управления линейными и нелинейными объектами, построения
сплайн - функций.
В данных методических указаниях рассматриваются вопросы синтеза
алгоритмов цифрового управления, разработки программной модели системы
управления и реализации проводимых экспериментов.
1. Цель работы
Целью данной работы являются синтез алгоритма управления линейным или
нелинейным объектом с использованием дельта-преобразований второго
порядка и разработка программной модели системы управления. При
проведении экспериментов с программной моделью необходимо выяснить
влияние основных параметров алгоритма (с*, t ) на качественные показатели
режима
стабилизации,
установить
соответствие
теоретических
и
экспериментальных
оценок,
продемонстрировать
работоспособность
алгоритмов адаптации к внешним неконтролируемым возмущающим
воздействиям в режиме слежения.
2. Оптимизированные дельта-преобразования второго порядка
и цифровое управление
2.1. Структура системы цифрового автоматического управления
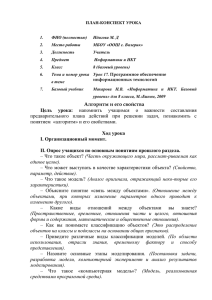
На рис.1 приведена в простейшем виде схема системы цифрового
автоматического управления. Состояние объекта управления характеризуется
выходной величиной (вектором) X, которая формируется с помощью датчиков,
преобразователей аналоговых значений в цифровой код (измерительных
устройств) и поступает в цифровое управляющее устройство (регулятор). На
входы регулятора поступают также задающие воздействия y зад , содержащие
информацию о требуемых значениях X, т.е. цели управления, и в общем случае
нестационарные (изменяющиеся во времени) измеряемые параметры Р. В
цифровом управляющем устройстве формируются по определенному
заложенному в нем алгоритму управляющие воздействия U, поступающие для
непосредственного управления на исполнительные устройства объекта. На
систему действуют возмущающие воздействия G, которые изменяют состояние
объекта X, препятствуя управлению.
G
P
УЗАД
Цифровое
управляющее
устройство
U
Исполнительные
устройства
Объект
управления
Измерительные
устройства
X
Рис. 1. Структурная схема системы цифрового автоматического управления
2.2. Основные теоретические положения синтеза алгоритмов
цифрового управления на основе оптимизированных дельтапреобразований второго порядка
Будем рассматривать объекты управления, исходные (реальные)
уравнения движения которых описывают управляемый процесс (по крайней
мере, для ограниченных областей изменения управляющих воздействий и
координат состояния) и могут быть приведены для i-го шага к следующему
виду:
2
x ji t j P ji t ; xki t ; xki t ; xki t ;U ki t ;
k 1, n; t ti 1 ; ti ,
j 1, n;
i 1, 2,
Y ji t j
(1)
j 1, n;
,
где x ji (t ), x ji (t ), x ji (t ) – значения j-й координаты объекта и ее производных на
U ki (t ) – управляющие
x j 0 x j (t t0 ) – начальные значения
x j 0 x j (t t0 );
координат состояния.
Вводим в рассмотрение задающие воздействия yзад.ji(t) и оцениваем ошибку
управления:
z ji (t ) x ji (t ) y зад, ji (t ),
(2)
воздействия;
z ji (t ) значения j-й координаты ошибки. Тогда, соответственно,
где
z ji (t ), z ji (t ) производные ошибки.
z ji (t ) x ji (t ) y зад , ji (t ),
(1) представляем в виде
z ji t j P ji t ; xki t ; xki t ; xki t ; U ki t y зад, ji (t ) ;
k 1, n; t ti 1 ; ti ,
i 1, 2,...
(3)
z ji t j P ji t ; xki t ; xki t ; xki t ;U ki t y зад, ji (t ) G ji (t );
j 1, n;
k 1, n; t ti 1 ; ti ,
Обозначим в (4)
3
i 1, 2,
xki t ; xki t ; xki t ; U ki t ;
k 1, n; t ti 1 ; ti ,
(5)
i 1, 2,
z ji (t ) Y ji (t ) y ji (t ) G ji (t ); j 1, n; t [ti 1; ti ] ,
(6)
где сумма ( y ji (t ) G ji (t )) может рассматриваться как внешние возмущения.
При
Yj ,i (t ) Yj ,i const на интервале t [ti , ti 1 ] система (6) по уравнениям
j=1,n совпадает с формой представления исходного дифференциального
уравнения дельта-преобразований второго порядка [2, (1.8б)], для которого
определены двоичные и троичные алгоритмы оптимизированных по
быстродействию и точности преобразований, качественные оценки,
возможности работы без адаптации и с адаптацией к произвольным
неконтролируемым внешним возмущениям и некоторые другие теоретические и
рекомендуемые для практического использования результаты.
Yj ,i 1 (t ) для будущего (i+1)-го
шага выполняется с использованием оцененных (измеренных) на i-м шаге
значений ошибок или значений ошибок и их производных, а также
дифференциально-разностных алгоритмов Д-преобразования.
Троичный алгоритм оптимизированного по быстродействию и точности
Д-преобразования, который в записи без измерения (с вычислением)
производной ошибки [2, (2.56)] и с привязкой к используемым обозначениям
индексов в системе дифференциальных уравнений движения для i-го шага
имеет вид
F ji1 z ji 2S ji (0,5(S ji ) 2 / c j 0,5c j ) sign S ji ;
2
2
F ji z ji S ji (0,5(S ji ) / c j 0,5c j ) sign S ji ;
1
2
1
если F ji F ji 0, то j ,i 1 signF ji ;
иначе j ,i 1 0;
i 0, 1, 2, ... ;
*
*
2
Y j ,i 1 с j j ,i 1 /(t ) ; t t i ;t i 1 ; c j c j ; c j 0, j 1, n.
z ji x ji y зад, ji ; S ji z ji z j ,i 1 0,5c *j ji ;
Вводим неконтролируемые (неизмеряемые) возмущающие воздействия
G ji (t )
t ;
Вычисление кванта преобразования
Учитывая теперь, что
j 1, n;
ji
Теперь система (4) принимает вид
i-м шаге; P ji (t ) векторы конечной размерности известных стационарных или
в общем случае нестационарных параметров;
P
(4)
(7)
где в правую часть уравнений входят
Троичный алгоритм оптимизированного по быстродействию и точности Дпреобразования, который в записи с измерением производной ошибки [2, (2.55)]
и с привязкой к используемым обозначениям индексов в системе
дифференциальных уравнений движения, имеет вид
В
приведенных
постоянная на интервале
sign(a) {1;1} ; c
*
j
выше
алгоритмах
(8)
Yj ,i 1 Yj ,i 1 (t ) const
t [ti , ti 1 ] величина (квант преобразования),
t Ф j,i 1 ( P k ,i 1 t ; xk ,i 1 t ; xk ,i 1 t ; xk ,i 1 t ;U k,i+1 t ;Yk,i+1 ; t );
t [ti , ti 1 ]; j 1,n;
4
процессов (1), по крайней мере, в ограниченных областях (областях
управляемости) существует решение системы уравнений (9) относительно
части (9) может выполняться на основе двух способов:
а) выполнение измерений указанных переменных с использованием
датчиков;
б) с использованием прогнозирования.
Построение алгоритмов прогноза базируется на особенностях решения
задачи синтеза, состоящей в обеспечении движения объекта управления по
траекториям дельта-преобразований второго порядка. Для идеального случая
(отсутствие возмущений, Gj(t)=0, yзад, j (t ) 0 , по крайней мере, на
t [ti 1 , ti 1 ] ) описание этого движения соответствует совместному решению
систем
параметр, который может быть выбран с учетом
Вводим запись (5) для прогнозируемого (i+1)-го шага и определяем (в
общем случае в неявном виде)
j,i 1
P k ,i 1 t считаем, что для рассматриваемых управляемых
Определение значений координат xk ,i 1 (t ) и их производных для правой
требуемой точности в установившемся процессе и быстродействия или
формируется в процессе адаптации; t временной интервал дискретизации,
выбираемый с учетом, в частности, требуемого быстродействия. Роль
демодулятора, не описанного в (7) и (8), выполняет собственно объект
управления.
Следующий этап решения данной задачи синтеза связан с определением
для
предстоящего
(i+1)-го
шага
управляющих
воздействий
U j ,i 1 (t ), t [ti , ti 1 ] на основе (5).
U
параметрах
U j ,i 1 (t ), j 1, n, t [ti , ti 1 ], i 0, 1, 2,... .
z ji x ji y зад , ji ; z ji x ji yзад , ji ;
Fji1 z ji 2 z ji t (0,5( z ji t ) 2 / c j 0,5c j ) sign( z ji t );
2
2
Fji z ji z ji t (0,5( z ji t ) / c j 0,5c j ) sign( z ji t );
1 2
1
если Fji Fji 0, то j ,i 1 signFji ;
иначе j ,i 1 0;
i 0, 1, 2, ... ;
*
2
*
Y j ,i 1 с j j ,i 1 / (t ) ; t ti ; ti 1 ; c j c j ; c j 0, j 1, n.
Y j ,i 1 .
При численно определенных Yk ,i 1 , координатах состояния и
k 1,n,
(9)
x j ,i t Yj ,i , t [ti 1 , ti ] ;
x j ,i 1 t Yj ,i 1 , t [ti , ti 1 ] ,
запись которых следует из (1), (5). В результате двойного интегрирования
имеем
xki xk ,i 1
xki =
0,5Yki t;
t
xk ,i 1 (t ) xk ,i Yk ,i 1 (t ti );
2
xk ,i 1 (t ) xk ,i xk ,i (t ti ) 0,5Yk ,i 1 (t ti ) ; ti t ti 1 ,
xk,i+1 Yk,i 1 ;
t [ti ;ti 1 ]; k 1,n;
(10)
xki и xk ,i 1 измеряемые координаты. По существу (10) представляет
где
точные соотношения прогнозирования координат состояния для момента
времени t (i 1) -го шага. При наличии упомянутых выше возмущений
соотношения (10) являются приближенными.
Обращаем внимание на то, что согласно теории дельта-преобразований
второго порядка должно быть обеспечено Yj ,i 1 (t ) const на t [ti , ti 1 ] при
изменяющихся в функции от времени t управляющих воздействиях и
координатах состояния.
Для реального обеспечения теоретического значения Yj , i 1 (t ) const
на (i+1)-м шаге необходимо определять такие U j ,i 1 (t ) при данном Yj ,i 1 в
каждый момент времени t [ti , ti 1 ] , чтобы выполнялось указанное условие;
практически для цифрового управления нужно говорить о разбиении при
необходимости шага t , т.е. [ti , ti 1 ] на такое количество r более мелких
шагов
(t r , ti 1, ti + ; 0,1, 2,..., ( r 1)
1, 2,..., r ) ,
при
котором
на
достаточном
уровне
или
"примерно"
поддерживается постоянство Yj ,i 1 . Влияние возможных реальных остаточных
отклонений Yj ,i 1, (t ) ,
t [ti , ti 1 ] от требуемого постоянного значения можно
рассматривать
как
дополнительные
приведенные
к
внешним
неконтролируемым возмущающим воздействиям в (6) и соответственно в (4).
Для определения значений координат xk ,i 1 (t ) и их производных для
правой части (9) теперь могут использоваться два способа с учетом указанной
выше дополнительной дискретизации:
а) выполнение измерений указанных переменных на каждом шаге с
использованием датчиков, если имеются практические возможности
выполнения измерений с учащением;
б) выполнение приближенного прогнозирования, базирующегося на
основе (10) и имеющего вид
xki xk ,i 1
xki =
0,5Yki t;
t
xk ,i 1, xk ,i Yk ,i 1 ;
xk ,i 1, xk ,i xk ,i 0,5Yk ,i 1 ( ) 2 ,
0, r 1 или 1, r .
xk,i+1 Yk,i 1 ;
(11)
Теперь для управляющих воздействий (9) можно записать:
U j ,i 1, Ф j ( P k ,i 1, ; xk ,i 1, ; x k ,i 1, ; xk ,i 1, ;U k ,i 1, ;Yk ,i 1 ; t );
(12)
j 1, n; k 1, n; 0, r 1 или 1, r.
Для разрешаемых относительно U j ,i 1 (t ) (U j ,i 1, ) уравнений могут
применяться прямые методы; для неразрешаемых методы решения систем
уравнений в неявной форме.
Введение дополнительной дискретизации не приводит к обязательной
необходимости соответствующего учащения съема измерительной информации
о текущих значениях координат состояния. Теоретическая оценка
необходимости и мерности учащения затруднительна, поэтому решение
данного вопроса реализуется при моделировании (имеет место тенденция
зависимости достаточного уровня учащений в зависимости от количества
базовых дифференциальных уравнений второго порядка; например, для
описания объекта в виде одного дифференциального уравнения второго
порядка, как правило, получение качественных оценок на уровне теоретических
оказывается достаточным при r=1, т.е. при полном отсутствии учащений). При
использовании прогнозирования (11) не требуется учащенный съем
измерительной информации.
Для обеспечения достаточной точности прогноза и решения задачи
управления в целом, по крайней мере, на отдельных протяженных временных
участках установившегося процесса необходимо, чтобы на этих участках
значение Yk ,i 1
возмущающих
5
t [ti ;ti 1 ]; k 1,n;
было существенно больше значений величин y зад , j (t ) и
воздействий
G ji (t ) . При локальных (кратковременных)
нарушениях этих условий будет иметь место переходный процесс. При работе
со значительными интенсивностями внешних возмущений и использовании
адаптации происходит автоматическое установление оптимизированного
соотношения между возмущениями и средней ошибкой управления.
Эффективным
средством
автоматической
организации
оптимизированного процесса управления является использование адаптивной
оптимизации по точности при неконтролируемых внешних возмущениях.
Решение задачи адаптивной оптимизации по точности в условиях
действия неконтролируемых (неизмеряемых) произвольных по характеру
изменения ограниченных возмущающих воздействиях базируется на
исследовании точностных характеристик Д-преобразования при наихудших
воздействиях и определении на основе минимаксного критерия значений
параметров
c*js , которые обеспечивают минимум среднего по модулю значения
ошибки zср.j на определенных интервалах изменения независимой переменной t
[1, 2].
Алгоритм Д-преобразования для i -го шага можно дополнить
следующими формулами, реализующими возможности одного из вариантов
адаптации на i-м шаге (начальные значения i=0, η=1, S=1, алгоритм записан для
одного базового уравнения):
i : i 1;
i
zсум z j ;
j
если i 1 q, то
zсум
zсрэ
,
i 1
zэ
f s sign ср* H ;
c
s
*
*
cs 1 cs (1 f s Qs );
S : S 1;
иначе cs*1 cs* ; S : S ,
6
: i 1;
где
Qs – в рамках данной работы малая по сравнению с единицей постоянная
величина, sign ( a ) {1;1} , причем можно принять sign (0) 1 .
Сущность алгоритма (13) состоит в выполнении через каждые, по крайней мере,
q шагов коррекции значения c * , которое остается постоянным до новой
э
коррекции; z cp значение средней по модулю реальной (экспериментальной)
ошибки управления на интервале S, где S текущий номер интервала
длительностью q шагов; H – теоретическая оценка отношения оптимальной
z cэр
Т
средней по модулю ошибки zср к с S* . Если при этом * H , то в среднем в
с
*
реальном процессе при данном c
преобладает влияние на ошибку
возмущающих воздействий и значение c * целесообразно увеличить. Если
z cэр
H , то имеет место преобладание значения c * , и эту величину
*
с
*
целесообразно уменьшить. Фактически при данном c интенсивность внешних
*
возмущений / c на интервале t [ti q ; ti ] косвенно оценивается значением
zсрэ / c* .
(13)
В целом сущность рассмотренной методологии синтеза алгоритмов
управления состоит в том, что формируется процесс управления, эквивалентный
процессу оптимизированного Д-преобразования второго порядка. Интересной
особенностью применения Д-преобразований для управления является, в
частности, то, что для различных объектов имеют место фактически шаблонные
качественные оценки и рекомендации, которые могут быть априорно
использованы при проектировании цифровой системы управления (реализация
квазиоптимальных по быстродействию и точности режимов стабилизации и
слежения на основе единых алгоритмов, оптимизированное по точности
управление с адаптацией к неконтролируемым возмущениям, оптимизация при
известных наихудших воздействиях и т.д.). При этом под оптимизацией по
быстродействию понимается то максимально достижимое быстродействие,
которое обеспечивается при ограничениях в виде текущих значений
параметров алгоритма дельта-преобразования c*, t и соответствует
оптимальному быстродействию эквивалентной по данным ограничениям
системы с объектом, модель которого включает два последовательно
включенных интегрирующих звена.
В
частности,
при отсутствии (или слабом
возмущений и постоянстве (или медленном изменении)
влиянии)
c*j
внешних
получаемые при
моделировании систем управления качественные экспериментальные оценки
существенно не отличаются от соответствующих теоретических значений
гарантированных показателей дельта-преобразований второго порядка:
ошибка установившегося процесса (для троичного алгоритма):
z j (t ) 0,5c*j ;
(14)
количество шагов переходного процесса ( z j (t0 ) 0 ):
R j ,пер 2
z j t0
, j=1,n;
*
c
(15)
j
длительность переходного процесса:
T j , пер R j ,перt.
(16)
Перечисленные оценки рассматриваются как приближенные, что
обуславливается, в частности, возникновением возмущений в связи с
приближенным решением дифференциальных уравнений при моделировании
объекта управления.
В рамках данной лабораторной работы для заданных в разделах 4, 7
объектов управления значение n = 1 и в индексах переменных не отображается.
3. Постановка задачи, исходные данные для выполнения лабораторной
работы
В процессе выполнения данной лабораторной работы студент должен:
а) изучить основные теоретические положения о
применении
оптимизированных Д-преобразований второго порядка для синтеза алгоритмов
цифрового управления;
б) преобразовать заданные уравнения движения к базовому виду (1), (4)
в) синтезировать алгоритм управления без учета адаптации;
г) разработать детализированную блок-схему программной модели,
включающую:
численное решение дифференциальных уравнений для целей имитации
поведения управляемого объекта;
алгоритм управления;
7
алгоритм адаптации системы управления к возмущающим воздействиям;
процедуру генерации возмущающих и задающих воздействий;
д) разработать программную модель системы управления, включающую,
помимо реализации пункта г), следующие пункты:
визуализацию процесса моделирования и управления путем построения
на экране монитора графиков движения, изменения ошибки и т. д.;
программный интерфейс, позволяющий варьировать все параметры,
необходимые для проведения исследований и экспериментального
подтверждения основных теоретических положений.
Программа должна функционировать в следующих режимах:
1) в режиме стабилизации. Данный режим обеспечивает выход объекта на
нужную траекторию при достаточно большом начальном отклонении.
Реализация режима позволяет наблюдать работу алгоритма управления в
переходном процессе, а после его завершения – в установившемся процессе.
Режим реализуется при отсутствии постоянно действующих
возмущающих(4.13)
воздействий и y зад (t 0) 0; y зад (t ) 0, t 0 ;
2) в режиме слежения. При работе в этом режиме обеспечивается движение
объекта с равными нулю начальными условиями (нулевые значения ошибки
и ее производной) и при задающем воздействии y зад (t ) 0, t 0 . В данном
режиме предполагается, что на объект постоянно действуют
ограниченные внешние возмущения. Режим реализуется без использования
и с использованием адаптации.
3) в режиме слежения при изменяющихся задающих воздействиях,
отсутствии или наличии возмущающих воздействий (дополнительное
задание по согласованию с преподавателем).
Исходные данные для выполнения лабораторной работы:
1. дифференциальные уравнения движения объекта;
2. значения параметров, входящих в уравнения движения;
3. характер изменения задающих воздействий.
По дисциплине “Цифровое управление, сжатие и параллельная
обработка информации” рассмотренные принципы построения программной
системы используются в рамках выполнения индивидуальных заданий и
научных исследований по темам:
- управление транспортной тележкой;
- управление объектом третьего порядка;
- управление маятником в верхнем неустойчивом положении;
- управление объектом с частичной структурной неопределенностью;
- управление объектом с частичной структурной и параметрической
неопределенностями;
управление объектом с фильтрацией координат на
оптимизированных дельта-преобразований второго порядка;
управление положением перевернутого маятника на тележке.
-
основе
4. Пример преобразования уравнений движения и синтеза
алгоритма управления
Yi 1
1
A
3
k1k2U i 1 (t ) xi 1 (t ) 2 xi 1 (t ) ; t ti ; ti 1 ,
T
k2
(19)
в результате (18) принимает вид (6)
zi 1 (t ) Yi 1 yзад,i 1 Gi 1 (t );
t ti ; ti 1 .
(20)
Пусть заданы уравнения движения следующего вида:
1 (t ) k22 (t );
(17)
3
k1 7,3; k2 0,31;
T 2 (t ) 2 (t ) k1U A2 (t ); где
4
T 0, 079; A 24 10 .
Преобразуем систему (17) в дифференциальное уравнение второго порядка
2 (t )
1
k2
1 (t ), 2 (t )
1
k2
1 (t ) и введем обозначение x(t)=1(t):
x(t )
1
T
A
3
k1 k 2U (t ) x (t ) 2 x (t ) .
k2
1
A
3
k1k2U (t ) x(t ) 2 x(t ) yзад (t ).
T
k2
Пусть на объект постоянно действуют возмущающие воздействия, и тогда
для t[ti; ti+1] можем записать:
zi 1 (t )
1
A
3
k1k2U i 1 (t ) xi 1 (t ) 2 xi 1 (t ) y зад.i 1 (t ) Gi 1 (t ).
T
k2
Обозначим
8
zi является измеряемой (2); на основе (20) можно
применить алгоритм Д-преобразования и определить Yi 1 [в данном примере
применяем троичный алгоритм (7)].
Вводим на t [ti , ti 1 ] более мелкий шаг и на основе (12), (19)
определяем:
U i 1, (TYi 1 xi 1,
A 3
xi 1, ) / k1k2 ;
k22
0, (r 1) или =1, r , (21)
где в правой части координаты состояния определяются в соответствии с (11), а
задающие воздействия известны.
Вводим задающее воздействие и переходим к уравнению с ошибкой
управления (4):
z (t )
Ордината ошибки
(18)
5. Модель системы управления
-й шаг, длительность L , всего M шагов;
1, M ; L .
5.1. Укрупненная блок-схема модели системы управления
Имитация
внешних
возмущений
M
Вкл/выкл
G
Имитация
поведения
объекта
Вкл/выкл
Рис.3. Структура шкалы дискретизации отсчетов времени при
моделировании
Формирование управляющего воз действия
Дельта преобразова
ние
Реализация
алгоритма
адаптации
Формирован
ие ошибки
управления
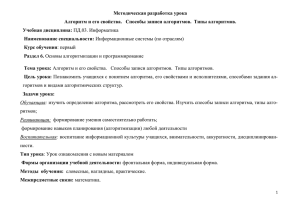
Рис. 2. Блок – схема модели системы управления
На рис.2 названия блоков соответствуют их функциональному назначению,
которое раскрыто в предыдущих разделах и описано при рассмотрении
соответствующих формул (блок «Имитация поведения объекта» – (17), (22),
блок «Формирование ошибки управления» – (2), блок «Реализация алгоритма
адаптации» – (13), блок «Дельта-преобразование» – (7),(8), блок «Формирование
управляющего воздействия» – (12), (21)).
5.2. Уровни и обозначения дискретизации временной шкалы
Рассмотрим структуру шкалы дискретизации отсчетов времени при
моделировании (см. рис. 3).
На рис. 3 обозначены:
i-й шаг, длительность t , всего N шагов; i 0, N 1;
-й шаг, длительность , всего r шагов;
9
1, r; t ;
r
Весь интервал времени моделирования разбивается на N шагов длиной t .
На каждом i-м шаге вычисляется значение Yi 1 , которое предполагается
постоянным на всем (i+1)-м шаге; эти значения используются для нахождения
управляющих воздействий для (i+1)-го шага. Далее каждый шаг разбивается на
более мелкие шаги ; для простых моделей может быть r=1 (данные
значения подтверждаются при проведении эксперимента).
Третий уровень разбиения (разбиение шага на М шагов L ) необходим
для процесса решения задачи имитации (моделирования) поведения
управляемого объекта. На этом этапе происходит численное решение
дифференциальных уравнений движения одним из численных методов.
В приведенных ниже обозначениях переменных системы (17) первый индекс
означает номер переменной, второй – номер шага t , третий – номер шага ,
четвертый – номер шага L . Например:
1,i – значение переменной 1 на i-ом шаге;
2,i – значение переменной 2 на i-ом шаге;
1,i 1,0,0 – значение переменной 1 на шаге i+1, =0, =0;
2,i 1,0,0 – значение переменной 2 на шаге i+1, =0, =0.
5.3. Детализированная блок-схема модели системы управления
(пример)
C
В приводимой ниже блок-схеме числовые значения переменных даны в
качестве примера; для каждого лабораторного задания эти значения выбираются
индивидуально и варьируются в процессе проведения экспериментов.
Д-преобразование на i-м шаге для определения
Yi1 , выполняемое по
формулам (7) или (8)
Начало
:=1
Задание начальных условий :
А
N; r; M ; t; t / r; L / M
Для объекта:
2,0 0; y зад 0;
Блок формирования управляющих воздействий на шаге
(11), (12), (21)
1,0 0,25(стабилизация); 1,0 0(слежение);
с использованием формул
xi 1 Yi 1 ;
x1 x0 1,0
Для управления:
z 1 x 0 y зад,0 ; 0 0; c 0* 0,001; c 0,75c * ; Y0 0;
x i ( xi x i 1 ) / t 0,5Yi t;
x
x Y ;
i 1,
q 20; t 0,01; Q 0,1
i
xi 1, x i x i 0,5Yi 1 ( ) 2 ;
U i 1, {( 21)}
i 1
Генерация, оценка и запоминание возмущений для N шагов
Gi 1 , i 0, ( N 1)
Блок имитации поведения объекта на шаге
Возмущение
Б
Gi 1
включено или выключено.
Численное решение уравнений движения и получение значений
Формирование ошибки управления
zi xi y çàä ,i ;
(см. рис 5)
Да
Вкл/Выкл
Реализация алгоритма адаптации
Накопление Zсум и формирование
Z э ср / cs
А
*
Сравнение с Н и коррекция (или сохранение неизменного) cs
Формирование
i 1, ; t [t i 1, 1 ; t i 1, ]; 1, r с учетом
действия возмущений
i := 0
*
r
; Q 0,1
Нет
*
i 1
c
C
10
Д
1,i 1, ; 2,i 1,
d1 (t ) k 2 2 (t )dt;
1
3
d 2 (t ) k1U (t ) 2 (t ) A 2 (t ) dt Gi 1 dt
T
Д
Да
Б
i := i + 1
Интегрируем на интервале t [t i 1, , 1 ; t i 1, , ], 1,2,..., M
I<N-1
t 1
t
1
3
k1U (t ) 2 (t ) A 2 (t ) dt Gi 1L.
T
t 1
t
Нет
Оценка zcp
1,i 1, , k 2
N
| zi | / N , вывод результатов, таблиц, графиков
i 1
2,i 1, ,
Конец
2 (t )dt;
Для Ui+1,=const на t [t i 1, , 1 ; t i 1, , ] , 1, 2,..., M можно записать
Рис.4. Блок-схема программной модели системы управления
t 1
t
1
1
3
2, i 1, , k1U i 1, L
2 (t ) A 2 (t ) dt Gi 1L;
T
T t 1
1,2,..., M .
Применяем метод Эйлера (для численного интегрирования используем
формулу прямоугольников и при этом ординаты принимаются постоянными на
шаге L) и теперь можем записать:
1, i 1, , k 2
5.4. Пример численного решения дифференциальных уравнений,
описывающих объект управления при моделировании
Рассмотрим принципы имитации поведения объекта на {i+1, } – шаге ().
Запишем систему уравнений (17) объекта управления в виде
1 (t ) k 2 2 (t );
1
2 (t ) k1U (t ) 2 (t ) A 23 (t ) G (t );
T
t [t i 1, , 1 ; t i 1, , ], 1,2,..., M .
или
M
G(t ) Gi 1 . Для
Шаг расчленяем на М более мелких шагов L, т.е. L
L t t 1, 1,2,...,M . Принимаем на шаге (i+1)
моделирования целесообразно брать удвоенную разрядную сетку.
Учитывая, что
11
1 (t )
d1 (t )
d 2 (t )
и 2 (t )
, имеем
dt
dt
t
2 (t )dt;
1, i 1, , k 2 2, i 1, , 1L;
1, i 1, , 1, i 1, , 1 1, i 1, , ;
2, i 1, ,
1
1
k1U i 1, L 2, i 1, , 1 A 23, i 1, , 1
T
T
2, i 1, , 1 2, i 1, , .
2, i 1, ,
(22)
L Gi 1L;
Начальные условия определены в схеме алгоритма и дополняются в
приведенной ниже записи:
1,1,0, 0 1, 0 ;
2,1, 0, 0 2, 0 .
=1
При прохождении стыков участков справедливо
1,i 1,0,0 1,i ,r , M ;
2,i 1,0,0 2,i ,r , M .
При переходе от участка к участку приращения и ординаты могут
согласовываться без использования индексов, т.е. последовательно по
записанному алгоритму. В данной работе индексы введены для удобства
описания материала; в программной реализации их использование не
обязательно. Пример алгоритма работы блока моделирования объекта приведен
на рис. 5.
1,i 1, , k 2 2,i 1, , 1L;
1,i 1, , 1,i 1, , 1 1,i 1, , ;
2,i 1, ,
1
1
k1U i 1, L 2,i 1, , 1 A 23,i 1, , 1 L Gi 1L;
T
T
2,i 1, , 1 2,i 1, , .
2,i 1, ,
Нет
= + 1
<M
Да
Выход из блока моделирования
Рис.5. Блок-схема алгоритма моделирования объекта
От блока формирования управляющих воздействий
12
6. Рекомендации по отображению результатов экспериментов
Ниже приводятся варианты образцов графиков, которые целесообразно
привести в отчете к лабораторной работе.
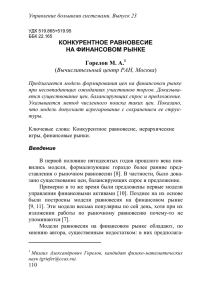
График на рис.6 иллюстрирует режим стабилизации при управлении
объектом (17). Начальное значение ошибки равно 0,4. Как видно из графика,
ошибка от первоначального значения устремляется к нулевому уровню. Из
графика на рис. 7 и таблицы 1 видно, что ошибка установившегося процесса
ограничивается уровнем 0,5с* (с*=0,001), что соответствует теоретической
оценке (16); длительность переходного процесса равна 40 шагов, что также
соответствует теоретическому (14) значению ( Rпер 41). На рис.8 представлен
вид функции управления U(t).
На рис. 9 демонстрируется зависимость ошибки управления от времени в
режиме слежения при интенсивных (относительно с*) возмущающих
воздействиях. В данном опыте не использовалась адаптация. Это означает, что
значение с* оставалось неизменным с течением времени. Как показано на
графике, значение средней ошибки z cp 0,56 .
Рис. 7. График установившегося процесса (укрупненный масштаб графика по
рис. 6)
Рис. 6. График переходного процесса (отсутствуют внешние возмущения)
Рис. 8. График изменения управляющего воздействия
13
№ шага
Таблица 1
№ шага
0
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
14
д
zi
Fi
0,4000
0,3994
0,3978
0,3951
0,3913
0,3865
0,3807
0,3738
0,3658
0,3568
0,3467
0,3356
0,3234
0,3101
0,2958
0,2804
0,2639
0,2464
0,2278
0,2081
0,1885
0,1700
0,1526
0,1363
0,1210
0,1068
0,0936
0,0810
0,0689
0,0579
0,0479
0,0390
0,0311
0,0243
0,0186
0,0133
0,0086
0,0050
0,0024
0,0009
0,0000
0,3995
0,3962
0,3907
0,3831
0,3734
0,3614
0,3473
0,3310
0,3126
0,2919
0,2691
0,2441
0,2168
0,1874
0,1557
0,1217
0,0856
0,0471
0,0064
-0,0365
-0,0317
-0,0282
-0,0248
-0,0214
-0,0182
-0,0151
-0,0121
-0,0253
-0,0219
-0,0191
-0,0164
-0,0137
-0,0111
-0,0086
-0,0061
-0,0117
-0,0090
-0,0067
-0,0044
Fi
T
0,0000
0,4005
0,3982
0,3939
0,3873
0,3786
0,3677
0,3547
0,3395
0,3221
0,3025
0,2807
0,2567
0,2305
0,2021
0,1715
0,1386
0,1035
0,0662
0,0266
-0,0153
-0,0116
-0,0092
-0,0068
-0,0046
-0,0025
-0,0004
0,0015
-0,0116
-0,0093
-0,0076
-0,0059
-0,0043
-0,0028
-0,0013
0,0001
-0,0054
-0,0038
-0,0026
-0,0013
i 1
0
-1
-1
-1
-1
-1
-1
-1
-1
-1
-1
-1
-1
-1
-1
-1
-1
-1
-1
-1
1
1
1
1
1
1
1
0
1
1
1
1
1
1
1
0
1
1
1
1
40
41
42
д
zi
Fi
0,0004
0,0004
0,0004
-0,0022
0,0009
-0,0001
Fi
i 1
T
-0,0002
-0,0001
0,0009
1
0
0
Окончание табл. 1
№ шага
43
44
45
46
47
48
д
zi
Fi
0,0004
0,0004
0,0004
0,0003
0,0003
0,0003
-0,0001
-0,0001
-0,0002
-0,0002
-0,0002
-0,0002
Fi
T
0,0009
0,0009
0,0009
0,0008
0,0008
0,0008
i 1
0
0
0
0
0
0
Рис. 9. График изменения ошибки управления (без адаптации)
На рис. 10 приведены результаты моделирования системы управления,
работающей в режиме слежения при тех же, что и на рис. 9, возмущениях но с
включенной адаптацией. Для обеспечения возможности проведения
эксперимента с адаптацией при тех же возмущениях, как и без адаптации,
необходимо в программной модели предусмотреть возможность сохранения и
последующего использования вектора возмущений. Начальное значение
с*=0,001. При моделировании в зависимости от знака f S ( f S {1;1} )
происходит увеличение или уменьшение значения с*. В случае
f S = +1
происходит увеличение c*; в противном случае происходит уменьшение c*. Как
видно из графиков на рис. 10, увеличение c* происходит до некоторого
значения, а затем появляются частые переключения величины f S , означающие,
что c* достигло значения, оптимального для текущей интенсивности
возмущений.
Рис. 11. График ошибки управления при синусоидальном задающем воздействии
На рис. 11 приведены результаты моделирования системы управления при
наличии постоянно изменяющегося задающего воздействия; в качестве функции
задающего воздействия была использована синусоида.
7. Варианты заданий
Рис. 10. График изменения ошибки управления (с адаптацией) и переменной fs
1.
2.
3.
4.
5.
15
2
x1 (t ) x1 x 2 ;
x 2 (t ) U .
x1 (t ) x 2 ;
x 2 (t ) kU sin( x1 ).
x1 (t ) kx2 ;
x 2 (t ) sin( x1 ) U .
x1 (t ) x 2 ;
4
x 2 (t ) 10 x 2 x1 5U .
3
x1 (t ) 10 x1 9,8 x 2 ;
x 2 (t ) U .
6.
x (t ) s(t ) 0,25 cos(x(t ));
s(t ) 0,25 x(t ) u (t ).
7.
x (t ) s (t ) 0,2 cos(x(t )) x(t );
s(t ) u (t ).
8.
x(t ) s(t ) 0, 25 x3 (t );
s(t ) x(t ) u (t ).
9.
x (t ) s(t ) 0,2 x(t );
3
s(t ) x(t ) 0,2 x (t ) u (t ).
x (t ) s(t ) 0,25 x (t );
10.
s(t ) x (t ) u (t ).
x (t ) s (t ) x(t ) sin( x(t ));
11.
s(t ) 0,2 x(t ) x (t ) u (t ).
2
x (t ) s (t ) 0,25 x(t );
12.
s(t ) x (t ) sin( x(t )) u (t ).
x (t ) s (t ) 0,2 cos(x(t ));
13.
s(t ) x (t ) sin( x(t )) u (t ).
x (t ) 0,5s (t ) sin( x(t )) x (t );
14.
s(t ) x 3 (t ) u (t ).
7.1. Процесс стабилизации (z(t),U(t), x(t)).
7.2. Процесс слежения (z(t),U(t), fs (t), x(t)):
– без адаптации,
– с адаптацией.
7.3. Отчетные материалы индивидуального задания (вопросы наличия и
содержание этого раздела уточняются преподавателем).
8. Выводы.
9. Листинг программы.
Контрольные вопросы
1.
2.
3.
4.
5.
6.
7.
2
x (t ) s (t ) sin( x(t )) x(t );
s(t ) x (t ) cos( x(t ) u (t ).
15.
8. Содержание отчета о работе
Отчет должен содержать следующие разделы:
1. Цель работы.
2. Постановка задачи, исходные уравнения движения.
3. Синтез алгоритмов управления.
3.1. Приведение исходных уравнений движения к базовым.
3.2. Построение функции для управляющего воздействия.
4. Укрупненная блок-схема модели системы управления.
5. Блок-схема программной модели системы управления (детализированная).
6. Таблицы (переходный процесс – процесс стабилизации).
7. Графики (минимальный перечень):
16
8.
9.
10.
11.
12.
13.
Что называется Д-преобразованием?
Какие виды Д-преобразований существуют и чем они отличаются друг от
друга?
Почему рассматриваемые алгоритмы называются оптимизированными?
Чему равна длительность переходного процесса и ошибка преобразования в
установившемся процессе для троичного алгоритма Д-преобразования при
отсутствии внешних возмущений?
Какой из алгоритмов обеспечивает наименьшую гарантированную ошибку
в установившемся процессе?
На чем основано применение Д-преобразований для цифрового
управления?
Перечислите основные шаги синтеза алгоритмов цифрового управления на
основе Д-преобразований второго порядка.
Что такое процесс стабилизации и процесс слежения?
Выделите класс объектов управления, для которых возможно применение
алгоритмов Д-преобразований.
Что такое квант преобразования и как он влияет на результаты управления?
На чем основана адаптация системы управления к внешним воздействиям?
В каких случаях целесообразно применять алгоритмы адаптации?
В чем состоит сущность решения задачи синтеза алгоритмов управления на
основе оптимизированных дельта-преобразований второго порядка?
Литература
1. Кравченко П.П.
Основы теории оптимизированных дельта–
преобразований второго порядка. Цифровое управление, сжатие и
параллельная обработка информации: Монография. Таганрог: Изд-во
ТТИ ЮФУ, 2008.-192с.ил.
2. Кравченко П.П. Оптимизированные дельта–преобразования второго
порядка. Теория и применение. Монография.- М.: Радиотехника, 2010. –
288 с. ил.
Кравченко Павел Павлович
Павлова Ирина Сергеевна
СОДЕРЖАНИЕ
ВВЕДЕНИЕ………………………………………………………………………..….3
1. Цель работы………………………………………………………………………..3
2. Дельта-преобразования второго порядка и оптимизированное цифровое
управление……………………………………………………...…………………….3
2.1. Структура системы цифрового автоматического управления……………….3
2.2. Основные теоретические положения синтеза алгоритмов цифрового
управления на основе оптимизированных дельта-преобразований второго
порядка………………………………………………………………………………..4
3. Постановка задачи, исходные данные для выполнения лабораторной
работы……………………………………………………………………………….10
4. Пример преобразования уравнений движения и синтеза алгоритма
управления…………………………………….…………………………………….11
5. Модель системы управления……………………………………………………13
5.1. Укрупненная блок-схема модели системы управления …………………….13
5.2. Уровни и обозначения дискретизации временной шкалы……………….….13
5.3. Детализированная блок-схема модели системы управления………………..15
5.4. Пример численного решения дифференциальных уравнений, описывающих
объект управления при моделировании…………………………………………...17
6. Рекомендации по отображению результатов
экспериментов……………………………………………………….……………19
7. Варианты
заданий………………………………………………………………...24
8. Содержание отчета о работе………………………………….………………….25
Контрольные вопросы………………………………………………………………25
Литература………………………………………………...………………………...26
Руководство
к лабораторной работе «Синтез алгоритмов цифрового управления на основе
дельта-преобразований второго порядка и разработка программной модели
системы»
по курсу
ЦИФРОВОЕ УПРАВЛЕНИЕ, СЖАТИЕ И ПАРАЛЛЕЛЬНАЯ ОБРАБОТКА
ИНФОРМАЦИИ НА ОСНОВЕ ДЕЛЬТА-ПРЕОБРАЗОВАНИЙ ВТОРОГО
ПОРЯДКА
Для студентов специальностей 230105, 010503,
магистерских программ 552801, 552805
Ответственный за выпуск Кравченко П.П.
Редактор
Корректор
ЛР №
Подписано к печати ……..г.
Формат 60х84 1/16 Бумага офсетная.
Офсетная печать. Усл.п.л. — …... Уч.-изд. л. — …..
Заказ №
Тираж …. экз.
«С»
Издательство Технологического института
Южного федерального университета в г. Таганроге
ГСП 17А, Таганрог, 28, Некрасовский, 44
Типография Технологического института
Южного федерального университета
ГСП 17А, Таганрог, 28, Энгельса, 1
17