c. Обнаружение объекта. - МГТУ им. Н. Э. Баумана
advertisement

Серия изданий
«Научно-образовательные и
научно-информационные
материалы
МГТУ им. Н.Э. Баумана —
национального
исследовательского
университета
техники и технологий»
Департамент образования города Москвы
Ассоциация московских вузов
Московский государственный технический университет
имени Н.Э. Баумана
Кафедра ИУ-3
«Информационные системы и телекоммуникации»
А.Н. Алфимцев, И.И. Лычков
Научно-образовательный материал
«Учебный стенд, основанный на программно-аппаратной
системе компьютерного зрения, для автоматического
исключения человеческого фактора при проведении
тестового экзамена на персональных компьютерах»
Москва
МГТУ им. Н.Э. Баумана
2011
Оглавление
Введение ..................................................................................................................................3
Решение задачи обнаружения объекта с использованием характерных признаков ........6
a. Выделение границ. ............................................................................................................7
b. Обучение. ...........................................................................................................................9
c. Обнаружение объекта. ....................................................................................................11
d. Оценка вычислительной сложности. ............................................................................12
e. Аппаратная реализация метода обнаружения. .............................................................13
3. Решение задачи распознавания с использованием нечетких операторов .......................15
4. Описание характеристик и графической части УСКД......................................................16
5. Результаты экспериментов по распознаванию. .................................................................18
6. Заключение. ...........................................................................................................................21
СПИСОК ЛИТЕРАТУРЫ ...........................................................................................................22
1.
2.
2
1. Введение
Проблема человеческого фактора была и остается актуальной во всех
сферах человеческой деятельности, особенно в сфере образования. Развитие
информационных технологий в XXI веке открывает новые возможности для
решения этой проблемы путем автоматизации процессов обучения и проверки
знаний за счет применения современных технических средств. Здесь важным
аспектом является задача обеспечения контроля доступа.
Под контролем доступа будем понимать совокупность аппаратных и
программных средств, направленных на ограничение и регистрацию доступа
людей (субъектов доступа) к некоторой информационной системе. При этом
аутентификацией называется процесс проверки принадлежности субъекту
доступа
предъявленного
им
идентификатора.
Для
осуществления
автоматической проверки широко применяются биометрические методы,
основанные на различных параметрах человеческого тела: отпечатки пальцев,
сетчатка глаза и др. Данные методы распознают пользователя с высокой
точностью, но многие из них очень дороги или требуют специальную
аппаратуру для своего функционирования.
Настоящая
работа
призвана
решить
задачу
аутентификации
экзаменуемого пользователя без привлечения дорогостоящего оборудования. В
работе был предложен учебный стенд контроля доступа (УСКД), который
использует методы компьютерного зрения для аутентификации пользователя
при проведении тестового экзамена на персональном компьютере. УСКД
работает на основе стандартного компьютера и дополнительно требует лишь
наличия бытовой Веб-камеры с разрешением не более 320 240 пикселей.
Аутентификация пользователя проводится путем анализа его характерного
видимого участка, называемого объектом. В настоящей работе в качестве
объекта используется лицо пользователя. Процесс аутентификации включает
обнаружение и распознавание объекта.
3
Цифровое изображение, получаемое видеокамерой в момент времени t и
имеющее по вертикали h, а по горизонтали w пикселей, обозначим It(h,w).
Видеопоток – это последовательность цифровых изображений (кадров) It(h,w),
It+1(h,w),...,
понимается
It+k(h,w).
Под
прямоугольной
множество
пикселей
областью
цифрового
интересов
Obt(X,Y)
изображения
It(h,w),
очерчивающих искомый объект, содержащее X пикселей по вертикали и Y по
горизонтали. Обнаружением объекта называется выделение области интересов
Obt(X,Y) на цифровом изображении It(h,w) в момент времени t. Под
обнаружением объекта в реальном времени понимается обработка видеопотока
с
частотой
не менее
10
кадров в
секунду.
Обучением называется
предварительная настройка и задание параметров метода для обнаружения
интересующего объекта. Обучение может выполняться на основе обучающей
выборки, состоящей из одного или нескольких обучающих изображений. Под
обучающим цифровым изображением понимается изображение It(h,w) с
дополнительной информацией о наличии или отсутствии на нем искомого
объекта. Обучающее изображение называется позитивным, если оно содержит
объект, который нужно обнаружить. В противном случае обучающее
изображение называется негативным.
Постановка задачи распознавания в области компьютерного зрения при
наличии нескольких источников информации об объекте выглядит следующим
образом. Пусть
T {t1 ,..., tm }
множество классов, к которым может быть отнесен
объект A, найденный на изображении. Тогда задача распознавания заключается
в том, чтобы определить, к какому классу tk , 1 k m относится объект A, и
насколько можно быть уверенным в том, что объект A относится к классу t k
при наличии некоторых данных об объекте, полученных с помощью различных
алгоритмов распознавания объекта.
Интерфейс
УСКД
является
мультимодальным,
так
как
процесс
распознавания основан на агрегировании нескольких модальностей объекта.
Слияние, агрегирование или фьюзинг информации
- один из важнейших
аспектов построения современной интеллектуальной системы [1, 2, 3]. Эти
4
системы используют агрегирование данных из различных источников
информации для правильного принятия решения. Под источником информации
понимается некоторый алгоритм распознавания объекта, выдающий данные,
позволяющие распознать объект, то есть отнести его к какому-либо заданному
классу
объектов.
Стремление
к
объединению
нескольких
источников
информации для получения результирующего решения, объясняется тем, что
каждый источник по отдельности может иметь высокую неопределенность или
неточность данных, которая уменьшается при их агрегировании [4]. В связи с
тем, что вероятностные методы агрегирования информации не всегда
корректно решают поставленную задачу, все большую популярность получают
методы агрегирования данных, основанные на теории нечетких операторов
(интегралов), в частности, на нечетких операторах Шоке и Суджено. В общем
случае нечеткий оператор – это нелинейный функционал, определенный в
соответствии с некоторой нечеткой мерой [5]. Если первичный признак – это
характерный признак объекта, позволяющий отличить по этому признаку один
объект от другого, а вторичный признак – это результат работы алгоритма
распознавания, основанного на первичных признаках, то задачей нечеткого
агрегирования является выбор наилучшего из решений задачи распознавания,
получаемых с помощью нечетких операторов Суджено и Шоке.
Целью работы является создание УСКД, основанного на программноаппаратной
системе
аутентификации
компьютерного
пользователя
при
зрения,
проведении
для
автоматической
тестового
экзамена
на
персональных компьютерах.
Чтобы достичь поставленной цели были решены следующие задачи:
1. Обнаружение объекта с использованием характерных признаков.
2. Распознавание объекта с использованием нечетких операторов.
3. Разработка графического пользовательского интерфейса УСКД.
4. Аппаратная реализация процедуры обнаружения объекта.
5. Проведение экспериментов для испытания УСКД.
5
В дальнейшем структура работы следующая. В разделе 2 представлено
решение
задачи
обнаружения
объекта
с
использованием
характерных
признаков. В разделе 3 представлено решение задачи распознавания объекта с
использованием нечетких операторов агрегирования. В разделе 4 описываются
характеристики
и
графическая
часть
УСКД.
Раздел
5
посвящен
экспериментальной проверке точности и устойчивости работы стенда. Раздел 6
является заключительным.
2. Решение задачи обнаружения объекта с использованием
характерных признаков
Рассмотрим метод обнаружения объекта в видеопотоке на примере
обнаружения абстрактного объекта. Метод включает в себя упрощенную
процедуру обучения и процедуру обнаружения объекта.
Упрощенная процедура обучения использует эталонное изображение,
содержащее искомый объект крупным планом на контрастном фоне, и состоит
из следующих шагов:
1)
Построение эталонного каркаса с помощью процедуры выделения
границ.
2)
Задание параметров метода.
Процедура обнаружения объекта получает на вход полутоновое
изображение It(h,w), эталонный каркас и параметры, заданные при обучении.
Процедура состоит из следующих основных шагов:
1)
Построение исследуемого каркаса с помощью процедуры выделения
границ.
2)
Поиск наилучшего совмещения исследуемого и эталонного каркасов.
3)
Принятие решения по обнаружению объекта путем сравнения
количества совпавших линий в наилучшем совмещении с заданным
порогом.
4)
Обрисовка области интересов Obt(X,Y).
6
a. Выделение границ.
(a)
(б)
(в)
(г)
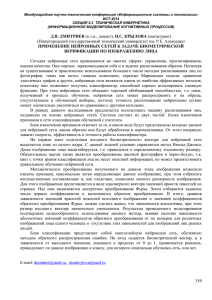
Рис. 1. Выделение вертикальных границ: а – исходное изображение;
б – обработанное изображение; в – точки границ; г – линии границ
Как на этапе обучения, так и в процессе работы цифровые изображения
подвергаются предварительной обработке. При этом извлекается информация о
расположении границ между темными и светлыми областями изображения.
Процедура выделения границ строит каркас цифрового изображения
It(h,w) и состоит из следующих шагов:
1)
Обработка цифрового изображения It(h,w) фильтром Хаара [9].
2)
Выделение точек границ на обработанном изображении It(h,w).
3)
Объединение найденных точек в линии.
4)
Сохранение интересующих свойств линий в каркасе изображения.
7
На
первом
обрабатывается
шаге
процедуры
фильтром
Хаара
входное
(рис.
4).
изображение
В
результате
(рис.
1,
а)
получается
обработанное изображение (рис. 1, б) того же размера, отражающее величину
местных перепадов яркости исходного изображения. Для вычисления пикселя
обработанного изображения необходимо найти соответствующий пиксель на
исходном изображении, очертить прямоугольную окрестность этого пикселя и
разделить эту окрестность пополам (рис. 2). Значение пикселя обработанного
изображения будет равно алгебраической сумме пикселей выделенной
окрестности исходного изображения, в которой пиксели правой части берутся
со знаком «плюс», а пиксели левой части – со знаком «минус». Если
использовать вычислительный прием интегрального изображения [7], то для
расчета одного пикселя обработанного изображения достаточно выполнить
всего пять операций сложения, независимо от количества пикселей в его
прямоугольной окрестности. Это существенно повышает быстродействие
метода, что важно для обработки видеопотока.
На третьем шаге процедуры найденные граничные точки объединяются в
линии. Две точки относятся к одной линии, если расстояние между ними не
превышает заданного расстояния, которое назовем радиусом связности. При
этом точки максимумов никогда не объединяются с точками минимумов. Таким
образом, на этом шаге выделяются вертикальные линии границ переходов
яркости с темного на светлое и со светлого на темное (рис. 1, г). Для выделения
горизонтальных границ достаточно развернуть прямоугольную окрестность
фильтра на 90º и сканировать производное изображение в поисках экстремумов
уже в вертикальном направлении.
8
Рис. 2. Прямоугольная
Рис. 4. Применение фильтра Хаара
окрестность некоторой точки M
Рис. 3. Применение порога
чувствительности
На
заключительном
шаге
процедуры
параметры
линий
границ,
выделенных на изображении, сохраняются в каркасе этого изображения.
Каждая линия каркаса задается координатами крайних точек и типом границы,
которой она соответствует.
b. Обучение.
Для работы метода необходимо задать значения восьми параметров.
Первые три параметра используются в процедуре выделения границ: размер
прямоугольной окрестности, порог чувствительности (рис. 3) и радиус
связности. Еще четыре параметра используются при наложении каркасов:
характерная линия, радиус зон поиска, коэффициенты допустимого растяжения
и
сжатия
линии.
Восьмым
параметром
является
количество
линий
исследуемого каркаса, которые должны совпасть с линиями эталонного каркаса
для принятия решения по обнаружению объекта. Рассмотрим упрощенную
процедуру обучения.
9
(a)
(б)
(в)
(г)
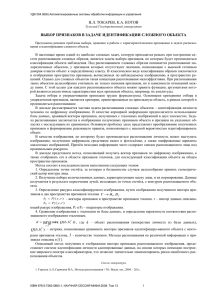
Рис. 5. Каркасы изображений:
а – эталонное изображение; б – эталонный каркас;
в – исследуемое изображение; г – исследуемый каркас
На первом шаге процедуры обучения с помощью описанной процедуры
выделения границ, из эталонного изображения получается эталонный каркас.
Чтобы не загромождать рисунки, будем рассматривать только вертикальные
границы переходов с темного на светлое, отмеченные жирным на рис. 1, г.
Тогда эталонный каркас будет иметь вид, представленный на рис. 5, б.
На втором шаге процедуры обучения задаются значения параметров
метода. Рассмотрим порядок выбора наиболее важных параметров: характерной
линии и радиуса зон поиска. Характерная линия эталонного каркаса выбирается
исходя из наибольшей длины (рис. 6, а). По ней будет выполняться совмещение
каркасов.
Положение
центров
остальных
линий
эталонного
каркаса
10
определяется относительно этой линии. Зоны поиска позволяют учесть
возможные отклонения центров линий от расчетных точек при изменении
положения пальцев и пропорций руки. Радиус зон поиска принимается равным
четверти длины характерной линии.
c. Обнаружение объекта.
(а)
(б)
Рис. 6. Характерная линия и зоны поиска: а – на эталонном каркасе;
б – после наложения на исследуемый каркас
На первом шаге на вход подается исследуемое изображение It(h,w) и из
него получается исследуемый каркас (рис. 5, г). На втором шаге по очереди
перебираются линии исследуемого каркаса. На каждой итерации эталонный
каркас масштабируется и совмещается с исследуемым каркасом так, чтобы его
характерная линия совпала с выбранной линией исследуемого каркаса. При
этом круговые зоны поиска преобразуются вместе с эталонным каркасом и
переносятся на исследуемый каркас (рис. 6, б). Затем подсчитывается
количество
линий
исследуемого
каркаса,
центры
которых
попали
в
соответствующие зоны поиска. В результате перебора находится наилучшее
совмещение каркасов, которое дает наибольшее число совпавших линий. На
третьем шаге количество совпадений сравнивается с установленным порогом,
принимается решение по обнаружению области интересов Obt(X,Y) на
цифровом изображении It(h,w) и выполняется обрисовка захваченного объекта.
11
d. Оценка вычислительной сложности.
Проведем оценку вычислительной сложности разработанного метода
обнаружения объекта на цифровых изображениях It(h,w).
Пусть n – количество линий в исследуемом каркасе, m – количество
линий в эталонном каркасе. Исходя из количества повторений циклов (рис. 7),
верхняя оценка вычислительной сложности будет эквивалентна сумме двух
бесконечно больших величин:
O(nhw) O(mn 2 ) .
Количество линий каркаса не
превышает количества пикселей изображения, поэтому
O(n) ~ O(hw) .
Количество
m линий эталонного каркаса определяется на этапе обучения и может быть
принято за константу на этапе обнаружения объекта. Преобразуем выражение
O(hwn) O(n 2 ) ~ O(hw hw) O(h 2 w2 ) ~ O(hw hw) ~ O(nN ) ,
где N = hw – количество пикселей
исследуемого изображения It(h,w). Таким образом, метод имеет линейную
оценку сложности, что позволяет проводить обнаружение объекта в реальном
времени.
12
Рис. 7. Структура программной реализации метода в псевдокоде
e. Аппаратная реализация метода обнаружения.
Компактные устройства типа смартфонов, карманных компьютеров и
цифровых фотоаппаратов в последнее время стали товарами массового спроса.
Аппаратная реализация предложенного метода позволит переносить его на
компактные устройства, имеющие низкую тактовую частоту.
Мы
называем
систему
программно-аппаратной,
так
как
метод
обнаружения объекта был реализован аппаратно в виде периферийного модуля
системы на кристалле на базе программируемой логической интегральной
схемы (ПЛИС) Altera Stratix 1S10. Структурно модуль обнаружения объекта
состоит из блока построения каркаса и модуля совмещения каркасов (рис. 8).
13
Рис. 8. Функциональная схема системы на кристалле
Обработка изображения в блоке построения каркаса организована по
потоковому принципу. Изображение передается на вход блока фрагментами по
нескольку пикселей, которые обрабатываются на конвейере. После передачи
всех фрагментов рассчитывается каркас изображения. Блок построения каркаса
включает модули интегрирования, выделения граничных точек и построения
линий, каждый из которых реализует отдельный этап конвейера. Ускорение
вычислений
достигается
трехэтапной
конвейерной
обработкой
и
одновременным продвижением пикселей по нескольким параллельным каналам
обработки. Модуль совмещения каркасов содержит матрицу детекторов
совпадения, которая ускоряет подсчет количества совпадающих линий
каркасов. Разработанные модули имеют масштабируемую архитектуру, т. е.
14
допускают наращивание количества каналов параллельной обработки без
существенных изменений во внутренней структуре модулей.
Испытания аппаратной реализации проводились на отладочной плате
Nios Development Board Stratix Edition, оснащенной ПЛИС Altera Stratix
EP1S10F780C6
с
тактовой
частотой
50
МГц.
8-битное
полутоновое
изображение размером 640×480 пикселей передавалось на вход блока
построения каркаса фрагментами по 8 пикселей за такт. Объем блока составил
2534 логических элемента, а время построения каркаса изображения – 1,04 мс
против 34 мс для программной реализации метода на процессоре Intel Pentium
IV 3,0 GHz.
3. Решение задачи распознавания с использованием нечетких
операторов
Пусть
X {x1, x2 ,..., xn }
- это множество алгоритмов распознавания объекта,
A – объект распознавания, hk : X [0,1] - это вторичный признак, результат
вычисления алгоритма принадлежности объекта A классу t k , h k ( xi ) вторичный признак после процесса фаззификации, то есть перевода в нечеткую
форму с помощью некоторой функции принадлежности (h k ( xi )) . Другими
словами h k ( xi ) - это показатель того, что объект A принадлежит классу t k ,
используя алгоритм xi , где значение 1 означает абсолютную уверенность, что
объект A принадлежит классу t k , 0 подразумевает абсолютную уверенность,
что объект A не принадлежит классу t k . Кроме того, каждому xi ставится в
соответствие степень важности
информации
xi
gi ,
обозначающая насколько важен источник
в распознавании класса t k . Эти значения могут быть
установлены экспертом или вычислены в результате обработки обучающих
данных.
Таким образом, решение задачи распознавания с использованием
нечетких операторов S k (h) может быть выполнено с помощью следующего
алгоритма. Алгоритм представлен на псевдокоде.
15
BEGIN
Задать значение g i для каждого алгоритма распознавания xi X {x1 , x2 ..., xn } ;
FOR для каждой записи в базе данных пользователей K=1,…,N (где N - общее
число
записей);
Вычислить значение h k ( xi ) ;
Вычислить k (1,) для нечеткой меры;
IF NOT hk ( x1 ) hk ( x2 ) ... hk ( xn ) ;
THEN Упорядочить X {x1 , x2 ..., xn } в соответствии с условием;
ELSE Вычислить нечеткую меру g k ( Ai ) ;
Вычислить нечеткий оператор S k (h) ;
END FOR;
Найти запись с максимальным значением S k (h) ;
END.
Необходимо отметить, что для каждого объекта, который система
контроля доступа может распознать, в базе данных предварительно создается
запись. В данном алгоритме последовательно просматриваются записи в базе
данных, для каждой из записей вычисляется нечеткий оператор, затем
выбирается запись с максимальным значением оператора. Эта запись и является
классом t k , к которому относится распознаваемый объект. Причем в качестве
нечеткого оператора может быть использован как нечеткий оператор Суджено,
так и нечеткий оператор Шоке. Нечеткая мера вычисляется как λ-нечеткая мера
[6].
4. Описание характеристик и графической части УСКД
Разработанный УСКД был применен для автоматического преодоления
человеческого фактора при проведении группового тестового экзамена на
персональных компьютерах. То есть, стенд решал задачу контроля доступа
16
студента к его экзаменационному тесту, при этом проверяя не только имя и
пароль доступа, но и совпадение изображения человека вводящего данные с
изображением человека, занесенного в базу данных. Таким образом,
исключалась
возможность
передачи
паролей
между
студентами
и
преднамеренная сдача экзамена одним студентом за другого.
УСКД обеспечивает автоматическую аутентификацию пользователя за
счет распознавания человека по изображению его лица и верхней части тела.
Он работает в реальном времени и обладает следующими характеристиками:
Автоматическое обнаружение объекта. Стенд автоматически находит
человека в видеопотоке, используя предложенный метод выделения
линий границ, и предоставляет информацию для последующего
распознавания или для обучения. Камера устанавливается один раз на
компьютере и не требует калибровки. Стенд может устойчиво
распознавать одного и того же человека под разными углами и на разном
расстоянии, не фиксированном освещении, на сложно-текстурном фоне
благодаря описанному алгоритму агрегирования нескольких алгоритмов
распознавания.
Быстрое распознавание на стандартном персональном компьютере.
Система работает на персональном компьютере с характеристиками:
Pentium 4/ 2 GHz / ОП 2 Gb / ОС Windows XP/ Веб-камера Logitech Pro
5000 320 240, 15 кадр/с. Для распознавания человека с помощью
нечетких операторов агрегирования системе требуется около 2,5 – 3
секунд.
Удобное администрирование. Представлен отдельный графический
интерфейс для администратора системы.
Распределенное хранение базы данных. Реализован механизм, как
единого хранения базы данных пользователей системы на сервере и
передачи данных авторизации через сеть, так и распределенное хранение
«популярных» частей базы на клиентских машинах.
17
для обеспечения конфиденциальности данных был использован алгоритм
шифрования AES.
Основная процедура взаимодействия студента с УСКД может быть
описана следующим образом. Стенд находится в спящем режиме и ожидает
пользователя, выводя диалог на экран монитора. Студент подходит к Стенду и
идентифицирует себя: вводит имя и пароль доступа к системе. Стенд по
введенным данным находит пользователя в базе данных и только тогда
включает процесс распознавания человека по его изображению. Финальное
решение «да» или «нет», зависит только от результата распознавания модуля
компьютерного зрения. Таким образом, не требуется проводить процесс
распознавания пользователя со всей базой и достаточно лишь сравнить
изображение с заданным числом записей в базе данных. Затем студенту
выводится экзаменационный тест, который, он может решать в реальном
времени. Причем если время теста превышает 30 минут, то процесс
распознавания может включаться несколько раз, на протяжении всего теста.
Как было отмечено, добавление нового пользователя в базу данных
может быть выполнено с помощью администратора или с помощью
автоматического обучения УСКД на новом пользователе. Во втором случае
процесс напоминает рассмотренный процесс распознавания, когда студент
сначала вводит идентификационные данные, а затем УСКД находит область
лица в видеопотоке и заносит изображения пользователя в базу. Процесс
занесения пользователя в базу обычно выполнялся в течение семестра при
проведении лабораторных работ в компьютерном классе. Необходимо
отметить, что на одного пользователя могло быть собрано несколько десятков
признаковых изображений, учитывающих меняющееся освещение и тип
одежды.
5. Результаты экспериментов по распознаванию
Для определения точности и устойчивости работы УСКД были
проведены следующие эксперименты распознавания пользователя по его
18
изображению. В данных экспериментах для распознавания пользователя
использовались четыре алгоритма распознавания: Скрытая Марковская модель
(СММ),
Алгоритм
определения
цвета
(АОС),
Алгоритм
нахождения
соотношений (АНС), Радиальные базисные функции (РБФ) [8]. Каждому
алгоритму требуется обучение на пользователях, которых необходимо
распознавать. Для этого была заполнена база данных состоящая из записей
пользователей «знакомых» системе.
Для хранимого изображения лица пользователя (представленного в
полутоновом цветовом пространстве) создается Скрытая Марковская модель, а
затем на ее вход подается новое изображение. Результатом работы СММ
является вероятность, означающая степень схожести входного изображения и
изображения, на котором она была обучена. Разность вероятностей СММ h( x1 ) ,
это разность вероятности, вычисленной СММ для хранимого изображения
( Pold ) и вероятности, вычисленной для входного распознаваемого изображения
( Pnew ).
Если
разность
превышает
заданный
порог
(найденный
экспериментально и равный 2), то пользователь не принадлежит к данной
записи в базе данных. Алгоритм определения цвета находит значение цвета (по
трем цветовым каналам r - красный, g - зеленый, b - синий) верхней части тела
пользователя.
Затем
сравнивает
это
значение
со
значением
цвета
распознаваемого пользователя, если Евклидово расстояние h( x2 ) превышает
заданный порог (найденный экспериментально и равный 40), то пользователь
считается
не
принадлежащим
данной
записи.
Алгоритм
нахождения
соотношений находит на лице расстояние между глазами, глазами и носом,
носом и ртом, глазами и ртом, глазами и подбородком, и на основе
соотношений
этих
распознаваемого
расстояний
пользователя,
ищет
если
Евклидово
порог
расстояние
превышен
h( x3 )
до
(найденный
экспериментально и равный 10), то изображение пользователя считается не
принадлежащим данной записи. Радиальные базисные функции для сравнения
19
используют найденные значения функций для хранимого Fold и входного Fnew
псевдо-трехмерного изображения лица пользователя.
Для вычисления значений h k ( xi ) , i=1, 2, 3, 4, значения h( xi ) , которые
являются результатами работы алгоритмов были фаззифицированы с помощью
функций принадлежности:
0, h( x1 ) 2
2 h( x )
1
, 1.5 h( x1 ) 2 .
1. СММ: h ( x1 )
2
1.5
1, 0 h( x1 ) 1.5
0, h( x2 ) 40
40 h( x )
2
h
(
x
)
, 0 h( x2 ) 40 .
2
2. АОС:
40
1, h( x2 ) 0
0, h( x3 ) 10
10 h( x )
3
, 0 h( x3 ) 10 .
3. АНС: h ( x3 )
10
1, h( x3 ) 0
0, h( x4 ) 30
30 h( x )
4
, 0 h( x4 ) 30 .
4. РБФ: h ( x4 )
30
1, h( x4 ) 0
Во многих работах при описании экспериментов определяется только
точность распознавания системы. Но немаловажным является вопрос:
насколько устойчиво система отвергает пользователей и не распознает их, если
их изображение не содержится в базе данных? Поэтому целью проведенных
экспериментов было нахождение коэффициентов точности и неустойчивости
распознавания УСКД. Коэффициент точности распознавания – это отношение
количества правильно распознанных изображений пользователей к общему
количеству изображений пользователей, поданных на вход. Коэффициент
20
неустойчивости распознавания – это отношение количества изображений
пользователей, не присутствующих в базе данных, которые были распознаны
системой как некоторая запись в базе данных, к общему количеству
изображений пользователей, поданных на вход.
В первом эксперименте среднее значение коэффициента точности
распознавания превысило 95%. Во втором эксперименте УСКД ни разу не
принял нового пользователя за одного из известных пользователей. Хорошие
результаты обоих экспериментов подтверждают высокую эффективность
алгоритма
агрегирования
мультимодальной
информации
в
задачах
распознавания, который также позволяет решить одну из основных проблем
конструирования
максимальное
систем
распознавания
увеличение
и
коэффициента
компьютерного
точности
зрения:
распознавания
и
максимальное уменьшение коэффициента неустойчивости распознавания.
6. Заключение
В работе представлен УСКД, который позволяет надежно и устойчиво
проводить аутентификацию пользователя. УСКД работает на персональном
компьютере
и
требует
только
наличие
обычной
Веб-камеры.
Экспериментальные результаты подтверждают возможность стенда устойчиво
гарантировать
персональное
распознавания
человека
и
исключение
прецедентов сдачи тестов одними студентами за других, во время групповых
промежуточных и итоговых экзаменов.
Внедрение информационных технологий в учебный процесс позволяет
ограничить
негативные
проявления
человеческого
фактора
в
системе
образования и повысить качество подготовки специалистов.
Процесс
методологии
распознавания
нечеткого
строится
агрегирования
на
основе
данных
из
интеллектуальной
разных
источников
информации. Использование агрегирования позволяет во многом преодолеть
проблемы присущее всем системам компьютерного зрения: калибровка камеры,
угол захвата области интереса, неоднородность текстуры фона и динамически
21
меняющееся
освещение,
соотношение
коэффициентов
точности
и
неустойчивости распознавания.
СПИСОК ЛИТЕРАТУРЫ
1. Chen X., Jing Z., Xiao G. Fuzzy Fusion for Face Recognition // Fuzzy Systems
and Knowledge Discovery. 2005. Vol. 361. P. 672 - 675.
2. Kwak K., Pedrycz W. Face recognition: A study in information fusion using
fuzzy integral // Patt. Recog. Lett. 2005. Vol. 26. P. 719 - 733.
3. Konen W., Schulze-Kruger E. ZN-face: A system for access control using
automated face recognition // Proceedings of the International Workshop on
Automated Face- and Gesture-Recognition. Zurich, 1995. P. 18-23.
4. Grabisch M., Roubens M. Application of the Choquet Integral in Multicriteria
Decision Making // In Fuzzy Measures and Integrals. 2000. P. 415 - 434.
5. Marichal J. On Choquet and Sugeno Integrals as Aggregation Functions // In
Fuzzy Measures and Integrals. 2000. Vol. 40. P. 247-272.
6. Popescu M., Keller J.M., and Mitchell J.A. Fuzzy Measures on the Gene
Ontology for Gene Product Similarity // IEEE/ACM transaction on computational
biology and bioinformatics. 2006. Vol. 3. P. 74-82.
7. Алфимцев А.Н., Лычков И.И. Метод обнаружения объекта в видеопотоке в
реальном времени // Вестник ТГТУ. 2011. Т. 17, № 1. С. 44-55.
8. Chen Y., Zhao Y. Face Recognition Using DCT and Hierarchical RBF Model //
Proc. of IDEAL. Berlin, 2006. P. 355 - 362.
9. Viola P., Jones M. Robust real-time object detection // Intl. J. Computer Vision.
2004. Vol. 57(2). P. 137-154.
22