ОПРЕДЕЛЕНИЕ ГЛАВНЫХ НАПРЯЖЕНИЙ
advertisement

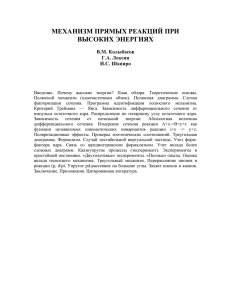
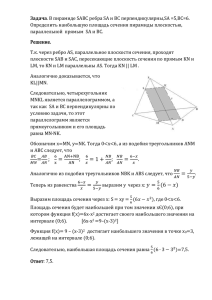
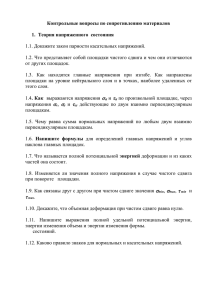
Министерство образования и науки Российской Федерации ФГАОУ ВПО «УРФУ имени первого Президента России Б. Н. Ельцина» Институт фундаментального образования Кафедра: Строительная механика ОПРЕДЕЛЕНИЕ ГЛАВНЫХ НАПРЯЖЕНИЙ ПРИ ПЛОСКОМ НАПРЯЖЕННОМ СОСТОЯНИИ Методические указания по выполнению экспериментальной и виртуальной учебно – исследовательских лабораторных работ Екатеринбург 2011 УДК 539.3 Авторы: Поляков А. А., Ковалев О. С. ОПРЕДЕЛЕНИЕ ГЛАВНЫХ НАПРЯЖЕНИЙ ПРИ ПЛОСКОМ НАПРЯЖЕННОМ СОСТОЯНИИ: Методические указания по выполнению экспериментальной и виртуальной учебно – исследовательских лабораторных работ/ А.А.Поляков, О.С.Ковалев. Екатеринбург: ФГАОУ ВПО «УРФУ имени первого Президента России Б. Н. Ельцина» , 2011. 27 с. Работа составлена в соответствии с Государственным образовательным стандартом высшего профессионального образования и учебными планами. В ней описаны современные методы испытания материалов, измерения напряжений и деформаций, определение перемещений, как на экспериментальной установке, так и в виртуальном компьютерном классе. Работа также содержит краткие теоретические сведения и практические указания по определению механических свойств материалов. Пособие предназначено для студентов очного и заочного форм обучения всех специальностей, изучающих курс «Сопротивление материалов». Данное издание может рассматриваться как учебное пособие. Библиогр.: Табл. 1. Рис. 32. ФГАОУ ВПО «УРФУ имени первого Президента России Б. Н. Ельцина», 2011 Авторы, 2011 2 Цель работы: Экспериментальная проверка расчетных формул для определения величины и направления главных напряжений при плоском напряженном состоянии от совместного действия изгиба и кручения. Краткие сведения из теории Рассмотрим тонкий и достаточно длинный цилиндр кольцевого сечения, защемленный одним концом и нагруженный на свободном крае сосредоточенной силой Р и скручивающим моментом М (рис. 1). y lК М 2 К 1 x 4 3 z P Рис. 1 По граням элемента 1234, вырезанного в окрестности точки C плоскостями, проходящими через ось цилиндра, и плоскостями, нормальными к ней, действуют касательные и нормальные напряжения (рис.1). Касательные напряжения определяются по формуле Mk , W (1) где Mk крутящий момент, в данном случае он равен скручивающему моменту M; 3 D 3 W 1 4 полярный момент сопротивления кольцевого сече16 ния цилиндра; D 4 I 1 4 полярный момент инерции сечения цилиндра; 32 W I max D расстояние от центра тяжести сечения до 2 , где max = наиболее удаленной точки. Здесь =d/D, D и d наружный и внутренний диаметры цилиндра. В случае вала круглого сплошного поперечного сечения коэффициент = 0. Нормальные напряжения в точке К, которая находится на наружной поверхности цилиндра, будут равны: Mz , Wz (2) где M z Pl K изгибающий момент в сечении на расстоянии lК от свободного края цилиндра; Wz осевой момент сопротивления кольцевого сечения. Для кольцевого сечения осевой момент сопротивления Wz равен Wz 0,5W D 3 1 4 . 32 (3) Элемент 1234, вырезанный вокруг точки К, показан на рис. 2. 3 1 1 0 2 1 4 Рис. 2 4 3 3 Величины главных напряжений 1 и 3 на основании теории напряженно-деформированного состояния в точке [1,2] определяются по формулам 1 2 4 2 , 2 2 1 3 2 4 2 . 2 2 1 (4) Положение главных площадок определяется по углу 0 наклона нормали n0. Угол 0 определяется по формуле tg 2 0 2 y 2 , (5) Используя вывод, вытекающий из исследования второй производной d 2 d 2 0 для выражения =x cos2+y sin2 y sin2, т.к. y = 0, x = 0, y 0 получим, что под углом 0 действует max = 1, а под углом 0 2 действует min = 3. Положительный угол 0 отсчитывается против часовой стрелки от направления до направления 1 (рис. 3). Напряжения, входящие в формулы (4) и (5), берутся по абсолютной величине. y 1 2 К 4 0 0 0 min max n 3 Рис. 3 5 x Необходимо заметить, что напряженное состояние, показанное на рис. 3, соответствует направлению усилий М и Р, показанных на рис. 1. При другом направлении усилий, направление напряжений изменится на противоположное. Для валов круглого сплошного поперечного сечения и кольцевого сечения при постоянном крутящем моменте по длине участка вала, угол закручивания или угол относительного поворота сечений этого участка (в радианах) определяется по закону Р. Гука M kl , GI (6) где G модуль сдвига. Модуль сдвига G связан с модулем Юнга (модулем упругости 1 рода) зависимостью G E , где коэффициент Пуассона (коэффициент по21 перечной деформации). Исследование кручения бруса с некруговым поперечным сечением (рис. 4) является значительно более сложной по сравнению с рассмотренной y lК М К I I x z P Рис. 4 выше задачей кручения бруса круглого поперечного сечения. 6 Допущения, принятые для бруса круглого поперечного сечения, не могут быть приняты для случая прямоугольного сечения. Прежде всего нарушается закон плоских сечений гипотеза Бернулли. Отдельные точки поперечного сечения перемещаются вдоль оси бруса, и всё сечение в целом перестает быть плоским. Происходит, так называемая, депланация сечений. Рассмотрим прямой брус прямоугольного поперечного сечения (рис. 5). На поверхности бруса до деформации кручения нанесем прямоугольную сетку линий, параллельных продольной оси и перпендикулярных к ней. Рис. 5 Приложим к брусу два взаимно уравновешенных скручивающих момента m. В результате деформации торцевые, поперечные сечения не остались плоскими, а депланировали (рис. 6). Рис. 6 Распределение касательных напряжений в сечении характеризуется следующим: в точках, расположенных на контуре сечения, напряжения параллельны соответствующим сторонам; напряжение в центре сечения равно нулю; 7 наибольшие касательные напряжения возникают в точках, лежащих посередине длинных сторон прямоугольника; в точках, расположенных посередине коротких сторон напряжения также достигают значительных величин; в угловых точках сечения 2 напряжения равны нулю. Распределение касательных напряжений в поперечном сечении прямоугольного бруса показано на рис. 7. Точное решение задачи о круче- h нии прямого бруса прямоугольного по1 перечного сечения дано в теории упругости [4]. Мы ограничимся приведением окончательных результатов. Наибольшее касательное напряжение можно определить по формуле b Рис. 7 1 Mk , Wk (7) где Wk = b3 момент сопротивления при кручении. Напряжение 2, возникающее в середине короткой стороны, определяется через 1: 2 = 1, (8) Угол закручивания бруса вычисляется по формуле M kl . GIk (9) где Ik = b4 осевой момент инерции прямоугольного поперечного сечения при кручении. 8 Входящие в данные формулы коэффициенты , и зависят от соотношения сторон прямоугольника и для некоторых значений h приведены в b табл. 1. Таблица 1 h b 1,0 1,5 2,0 3,0 4,0 6,0 8,0 10,0 0,140 0,294 0,457 0,790 1,123 1,789 2,456 3,123 0,208 0,346 0,493 0,801 1,128 1,789 2,456 3,123 1,000 0,859 0,795 0,753 0,745 0,743 0,742 0,742 Таким образом, формулы для определения max = 1 и при кручении прямого бруса прямоугольного поперечного сечения имеют такой же вид, что и для бруса круглого поперечного сечения. Однако величины зависят от формы и размеров поперечного сечения и лишь по размерности и значению в расчетных формулах аналогичны W и I для бруса круглого поперечного сечения. Нормальные напряжения в точке К принадлежащие крайнему верхнему волокну II, будут равны: Mz , Wz (10) где M z Pl K изгибающий момент в сечении на расстоянии lК от свободного края цилиндра; Wz осевой момент сопротивления. Для прямоугольного сечения он равен bh2 Wz . 6 (11) Осевой момент инерции прямоугольного сечения Iz bh3 . 12 9 (12) Перемещения характерных точек Расчет перемещений можно провести с помощью интеграла Мора. На рис. 8 изображена расчетная схема, представляющая образец, находящийся под действием сосредоточенных сил P1 и P2. На рис. 9 и рис. 10 показаны эпюры крутящего момента Mкр и изгибающего момента Mи от этой внешней нагрузки, соответственно. l P1 lК К B l1 D l2 P2 Рис. 8 P1l1+P2l2 B К D Эпюра Mкр Рис. 9 (P1P2)l P1l1 B K D P2l2 Эпюра Mи Рис. 10 Для определения перемещения точки K, находящейся на образце на расстоянии llK от заделки, приложим к ней единичную силу (рис.11) и еди- 10 ничный момент (рис. 13). Соответственно на рис. 12 и рис. 14 изображены единичные эпюры изгибающего момента M и и крутящего момента M кр . l llK lK 1 K K Эпюра M и Рис. 10 Рис. 11 l lK 1 1 K K Эпюра M кр Рис. 12 Рис. 13 Тогда прогиб точки K равен K M иM и dx , EI z а угол поворота сечения, связанного с точкой K K M кр M кр GI dx . Для определения перемещения точки В точки приложения силы Р1, приложим к ней единичную силу (рис.15) и единичный момент (рис. 18). Соответственно на рис. 16, 17, 19 и 20 изображены единичные эпюры изгибающего момента M1и , M 2и и крутящего момента M1кр , M 2 кр . 11 l lC K l 1 B B l1 D K 1l1 K K Эпюра M 2и Рис. 19 1l1 1 B 1 K D Рис. 17 D Эпюра M1и 1l1 K 1 B 1 B D Рис. 16 l1 D Рис. 18 Рис. 15 1l 1 B D Эпюра M 2 кр Эпюра M 1кр Рис. 20 Прогиб точки В равен B M кр M1кр M и M 1и dx dx , EI z GI а угол поворота сечения точки В B M кр M 2кр M и M 2и dx dx . EI z GI Расчет перемещения точки D приложения силы Р2 можно сделать аналогично, как и для точки B. 12 Экспериментальное исследование напряженного состояния в точке K Для экспериментального исследования напряженного состояния в стенках образца используем тензометрический метод [3]. Сущность метода рассмотрена ниже. Электротензометрами называются электрические устройства, позволяющие измерить малые (упругие) деформации твердых тел, возникающие под действием силовых факторов. Электротензометры имеют ряд преимуществ по сравнению с другими тензометрами (рычажными, зеркальными): высокую точность, чувствительность, возможность применения при динамических испытаниях. Электротензометр состоит из воспринимающего устройства (датчика омического сопротивления), источника питания и регистрирующего прибора (измерительного моста с гальванометром). Главной частью воспринимающего устройства является проволочный датчик омического сопротивления – тензорезистор. Он представляет собой очень тонкую (1040мкм) проволоку из константана (сплав меди с никелем) или нихрома (сплав никеля, железа и хрома), заклеенную в виде плоской решетки из нескольких петель между двумя листками тонкой бумаги (рис. 21). Базой тензорезистора называется длина петель решетки (рис. 21). Наиболее распространены тензорезисторы с базой l равной 5мм, 10мм, 20мм и сопротивлением R = 50200 Ом. Для измерения деформаций тензорезистор приклеивается к очищенной поверхности детали специальным клеем так, что его проволочная решетка после полимеризации клея полностью воспринимает все деформации детали (деформации детали и тензорезистора одинаковы). 13 клей бумага выводы деталь l Рис. 21 Выводные концы тензорезистора соединяются с регистрирующим прибором. Деформация исследуемой детали вызывает такую же деформацию решетки тензорезистора, в результате чего изменяются ее геометрические размеры и, следовательно, электрическое сопротивление. Изменение сопротивления тензорезистора обычно очень мало и составляет величину порядка 0,010,1Ом. Чтобы замерить такие малые изменения сопротивления необходимы совершенные регистрирующие приборы. Наибольшее распространение получили измерительные мосты (мост Уитстона), которые обладают высокой чувствительностью к изменению сопротивления одного из плеч моста. Мост состоит из четырех плеч сопротивлений R1, R2, R3, R4, соединенных между собой в виде четырехугольника (рис. 22). В одну из диагоналей схемы включен источник постоянного тока, а в другую гальванометр (Г). 14 R1 R2 Г R4 R3 Рис. 22 Ток, проходящий через гальванометр, можно определить, пользуясь законом Кирхгофа Ir U R1R3 R2 R4 , R2 R3 R4 R1R3 R4 R1R2 R4 R1R2 R3 (13) где U напряжение источника питания. Из формулы (1) видно, что если сопротивления R1, R2, R3, R4 удовлетворяют соотношению R1R3 R2 R4 (14) то тока в гальванометре не будет. В этом случае говорят, что мост уравновешен или сбалансирован. В качестве сопротивления R1 и R2 в мост включены тензорезисторы. Тензорезистор с сопротивлением R1 наклеен на исследуемую деталь и деформируется вместе с ней. Это рабочий тензорезистор. Сопротивление рабочего тензорезистора изменяется не только вследствие деформации детали, но и при изменении температуры. Для того, чтобы исключить влияние измене15 ния температуры детали на показания прибора, во второе плечо моста включается такой же тензорезистор с сопротивлением R2 (обычно R1 = R2), который наклеен на вспомогательную пластинку из того же материала, что и испытываемая деталь, но не подвергающуюся деформации. Деталь и пластинка с наклеенными на них тензорезисторами находятся в одинаковых температурных условиях, то есть в случае изменения температуры воздуха сопротивления R1 и R2 изменяются на одинаковую величину. При этом равенство (14) не нарушается. Мост остается уравновешенным. Сопротивление R2 как бы компенсирует изменение сопротивления рабочего тензорезистора, возникшее вследствие изменения температуры. Поэтому тензорезистор R2 называют компенсационным. Сопротивления R3, R4 (рис. 22) выполнены в виде реохорда (реостата) со скользящим контактом. Перемещение контакта реохорда фиксируется на градуированной круговой шкале (на рисунке шкала не показана). Реохорд вместе с гальванометром смонтированы в одном корпусе. Для того, чтобы замерять напряжения одновременно во многих точках детали в измерительных мостах установлены сразу несколько описанных выше схем – каналов. Известны десяти, двадцати, сорока и стоканальные тензомосты. Определение деформаций производится нулевым методом. Перед нагружением детали мост должен быть сбалансирован. Для этого изменяют соотношение сопротивлений R3:R4 (перемещая контакт реохорда) до тех пор, пока не будет выполнено условие (14). Стрелка гальванометра при этом покажет ноль: мост уравновешен. По шкале прибора берется первый отсчет n1. Далее нагружается деталь, которая деформируется вместе с наклеенным на ее поверхности рабочим тензорезистором. Сопротивление тензорезистора R1 меняется. Условие (14) нарушается, в измерительной диагонали появляется ток и стрелка гальванометра отклоняется от нуля. Производится вторичная 16 балансировка моста – перемещением рукоятки реохорда до нулевого показания гальванометра. Записывается второй отсчет n2 по шкале прибора. Разность отсчетов n = n2 n1 пропорциональна деформации тензорезистора, а следовательно, и деформации детали. Таким образом, если бы мы знали цену деления прибора, например, в единицах относительной деформации на одно деление К, то могли бы вычислить относительную деформацию детали в направлении наклеенного тензорезистора = Кn. Цена деления прибора устанавливается опытным путем, то есть путем тарировки. При проведении исследований величина К приводится в исходных данных. Веерную розетку из трех тензорезисторов устанавливаем в точку К на поверхности вала, показанную на рис.23 (вид сверху). u ③ 45 ② x x 45 K ① v z Рис. 23 В случае совместного действия силы P и скручивающего момента m на конце консоли (см. рис. 1 и рис. 3) направление главных напряжений неизвестно и может быть определено по относительным деформациям u, x, v в направлениях u, x, v (рис. 24). 17 u ③ σ3 σ1 ② αo x x 45° ① φ0 90° v Рис. 24 Направление минимального главного напряжения 3 в нашем случае определится по формуле [1, 2] tg 20 2 x u v . u v (15) Можно установить, что направление максимального главного напряжения 1 определится по формуле 0 45 0 , (16) где 0 отсчитывается от направления u; 0 отсчитывается от направленияx (см. рис. 24). Относительные продольные деформации в направлении действия главных напряжений находятся по формуле [1] 1,3 u v 2 1 2 x u 2 x v . 2 (17) Относительные деформации в направлении датчиков u, x и v, входящие в формулы (6) и (7), определим по показаниям прибора u K nu ; x K nx ; v K nv . (18) Здесь nu, nx, nv приращения показаний прибора на ступень нагрузки; Kцена деления прибора в относительных деформациях. 18 Главные напряжения определяются выражениями 1î ï E 1 3 , 1 2 (19) 3î ï E 3 1 , 1 2 (20) где , E коэффициент Пуассона и модуль Юнга материала цилиндра, соответственно. Приведенные выше формулы надо рассматривать алгебраически. 19 Порядок выполнения экспериментальной учебно-исследовательской лабораторной работы Работа выполняется на установке CM 18A (рис. 25). На образец 1 наклеены тензорезисторы в виде веерной розетки. На рис. 23 показан вид сверху на точку К. 1. Определить длину образца l, расстояние lК, длины плеч подвесок l1 и l2. 2. Плавно без ударов загрузить подвеску 3 грузом весом P1, а подвеску 4 грузами весом P2 по схеме, изображенной на рис. 24. 3. Снять отсчеты по прибору «Терем- 4.0» для датчиков 1, 2 и 3 (рис. 22). 4. Повторить несколько раз операцию загружения подвески 3 отличным грузом весом P1+sP1, а подвески 4 P2+sP2, где s = 1, 2, 3, …и т.д., и снять отсчеты. 6 5 2 К 1 lC 4 l2 l1 3 Рис. 25 20 5. Результаты отсчета записать в таблицу наблюдения (см. форму отчета). 6. Разгрузить установку. 7. Вычислить опытные относительные деформации и напряжения по формулам. К P2 lК l2 l1 l P1 Рис. 26 8. Вычислить теоретические напряжения по формулам, учесть, что при такой схеме загружения расчетный крутящий момент на ступень нагружения М k P1l1 P2 l2 , а расчетный изгибающий момент M z P1 P2 l K . 9. Сопоставить теоретические и опытные напряжения оп 100%. (18) 10. Вычислить теоретическое и опытное значение угла 0 наклона максимальных главных напряжений и сопоставитьих. 11. Вычислить перемещения характерных точек по интегралу Мора. 12. Оформить отчет по прилагаемой форме. 21 Порядок выполнения виртуальной учебно-исследовательской лабораторной работы Для выполнения виртуальной работы применяются следующие клавиши клавиатуры (рис. 27): W, S, A, D – для перемещения в пространстве; F2, E – аналоги средней клавиши манипулятора (при первом нажатии берется объект, при последующем – ставится); Ctrl – присесть; Z – визуальное приближение. F10 – выход из программы. Рис. 27 На рис. 28 представлены активные кнопки компьютерной мыши (манипулятора), также используемые при проведении виртуальной научноисследовательской работы. Они имеют следующие назначения: левая клавиша манипулятора (указатель 1 на рис. 28) – управление объектами (в режиме манипуляции). средняя клавиша манипулятора (указатель 2 на рис. 28) – взять (применить) объект (в режиме манипуляции). Также данная клавиша позволяет проводить ускоренную работу с некоторыми объектами (например, ускоренное закручивание (откручивание) рукоятки тормозного устройства). 22 правая клавиша манипулятора (указатель 3 на рис. 28) – переход в режим манипуляции (управление объектами), возврат в режим навигации (перемещения по сцене). Рис. 28 Примечание: При появившемся курсоре невозможно перевести взгляд вверх и стороны. Порядок выполнения работы следующий: 1. Выбрать образец: его тип (цилиндр сплошного сечения, цилиндр кольцевого сечения или брус прямоугольного сечения), соответствующие геометрические параметры и физические параметры материала (модуль Юнга Е и коэффициент Пуассона ). Определить расстояние до точек К – до точек расположения тензорезисторов от плоскости действия грузов. Для этого необходимо подойти к доске, показанной на рис. 29, переключится в режим мышки (в режим манипуляции), и нажать на эту доску левой клавишей мыши. После выбора величин нажать «ОК». 23 Рис. 29 3. С помощью активных клавиш клавиатуры подойти к установке и выставить длину плеча l1 (правой части рычага, рис. 26), переключившись в режим мышки. Требуемое расстояние l1 выбрать, нажимая левой клавишей мыши на деление на плече (рис. 30). Длина плеча второй подвески (левой части рычага, рис. 26) l2 = 30 см не меняется. Рис. 30 24 4. Нагрузить подвески грузами в P1 и в P2. В режиме мышки использовать клавишу Е и переместить требуемое количество грузов на подвески (рис. 31). На столе расположены грузы в 5 Н и 10 Н. Рис. 31 5. Снять показания с четырех исследуемых точек образца К1, К2, К3, К4, нажимая на соответствующую точку (рис. 32). Показания в текущем времени отображаются на виртуальном приборе «Терем – 4.0» с ценой деления в относительных деформациях K = 1,3510-6, расположенном в правом нижнем углу экрана (рис. 31), и на доске (рис. 32). На доске приводится величина угла поворота крайнего сечения, совпадающего с плоскостью действия грузов. На поверхности образца показана линия, параллельная продольной оси стержня, без нагрузки (рис. 31). По мере нагружения подвесок грузами P1 и P2 стержень деформируется (закручивается), и эта линия занимает новое положение и отображает качественное изменение углов поворотов сечений. 6. Повторить несколько раз операцию загружения подвески с плечом l1 отличным грузом весом P1+sP1, а подвески c с плечом l2 P2+sP2, где s = 1, 2, 3, …и т.д., и снять отсчеты. 25 Примечание: Необходимо соблюдать условие, что величина P1+sP1 больше, чем величина P2+sP2, в противном случае напряженное состояние точек К1и К3 будет другим. Рис. 32 7. Результаты отсчета записать в таблицу наблюдения (см. форму отчета). Для каждой из исследуемых точек К1, К2, К3, К4 необходима своя таблица наблюдения. 8. Выйти из виртуальной лабораторной работы, нажав клавишу F10. 9. Вычислить опытные относительные деформации и напряжения по формулам. 10. Вычислить теоретические напряжения по формулам, учесть, что при такой схеме загружения расчетный крутящий момент на ступень нагру- 26 жения М k P1l1 P2 l2 , а расчетный изгибающий момент M z P1 P2 l K . 11. Сопоставить теоретические и опытные напряжения оп 100%. (18) 12. Вычислить теоретическое и опытное значение угла 0 наклона максимальных главных напряжений и сопоставитьих. 13. Вычислить перемещения характерных точек по интегралу Мора. 14. Оформить отчет по прилагаемой форме. 15. Изменить параметры из п.1 и повторить действия из пп. 2-14. 27 ОТЧЕТ Цель работы:…………………………………………..………………………….. …………………………………………………………….………………………… …………………………………………………………….………………………… Установка………………………………….……………………………………… Схема нагружения К P2 lК l2 l1 lК =………см; l = ……….см. l P1 Измерительные приборы……………………………………………………….. Цена деления прибора K = ………………….. Плечи подвесок: l1 = ………………см; l2 = ………………см. Данные о цилиндрическом образце: Данные об образце прямоугольного сечения: материал __________; материал __________; наружный диаметр D =………..cм; высота h = ………… см; внутренний диаметр d = ………..cм; ширина b = …………см. d ……….; D h ……….; b модуль упругости E = ………….ГПа; модуль упругости E = ………….ГПа; коэффициент Пуассона = ………… коэффициент Пуассона = ………… 28 Таблица наблюдений Отсчёты показаний тензорезисторов № Нагрузка, Н s P1 1 0 2 1 3 2 … … 10 P2 Датчик v Датчик x Датчик u канал № 1 канал № 2 канал № 3 n1 n1 n2 n2 … … … n3 … … … n3 … … 9 P1 = Н P2 = Н K ncp nvср= nxср= nuср= v x u Величина ni (i = 1, 2 или 3) равна разности между последующим и предыдущим значением ni. При первом измерении ni не определяется (в таблице стоит знак «»). Величина nср равна сумме величин ni, деленной на число, которое меньше на единицу числа проведенных испытаний. Схема наклейки тензорезисторов u ③ σ3 σ1 x ② αo x 45° ① φ0 v 29 90° Главные деформации 1,3 u v 1 2 2 x u 2 x v 2 =…………………….=………. 1 …………..; 3 …………… Главные напряжения 1оп 3оп E 1 3 =………………..=…………МПа; 1 2 E 1 2 3 1 =………….……..=…………МПа. Моменты сопротивления сечения цилиндра W D 3 1 4 …………………….=………см3; 16 D3 W 1 4 …………..……….=………см3. 32 Моменты сопротивления прямоугольного сечения bh2 Wz …………..……….=………см3. 6 Wk = b3= …………..……….=………см3. (коэффициент определить с помощью таблицы 1) Крутящий момент на ступень нагружения М k P1l1 P2 l 2 ……………..=…………Нм. Изгибающий момент на ступень нагружения М z P1 P2 l K ……………..=…………Нм. Теоретические напряжения для цилиндрического образца Mk ……..=……МПа; W 30 Mz ……..=……МПа. W Теоретические напряжения для образца прямоугольного сечения Mk ……..=……МПа; Wk Mz ……..=……МПа. Wz Характер напряженного состояния в точке К 3 1 1 0 2 1 4 3 3 Теоретические главные напряжения 1,3 1 2 42 ……………………………=…………. МПа; 2 2 1=…………….МПа; 3=…………….МПа. Сопоставление теоретических и опытных напряжений 1 1оп 100 % ………………………………….=………..%; 1 3 3 оп 100 % ………………………………….=………..%. 3 Опытное значение угла, определяющего направление максимального главного напряжения 31 tg 20 2 x u v ………………………………=…………..; u v 0 =……………….; 0(оп) = 4500 =………….=………. Тот же угол, найденный по теоретической формуле tg 2 0 2 ……………………=……….; 0 =…………………. Сопоставление теоретического и опытного значений угла 0 0( оп) 0 100% ………………………………..=………………..% Выводы по работе………………………………………………………….. ……………………………………………………………………………………… ………………………………………………………………………………………. ………………………………………………………………………………………. Отчет принял …………………………….. …………………………….. 32 Литература 1. Поляков А.А., Кольцов В.М. Сопротивление материалов и основы теории упругости: учебник / А.А. Поляков, В.М. Кольцов, Екатеринбург: УГТУ – УПИ, 2008. - 458 с. 2. Дарков А.В. Сопротивление материалов / А.В. Дарков, Г.С. Шпиро // М.: Высшая школа, 1989. - 624 с. 3. Пригоровский Н. И. Методы и средства определения полей деформаций и напряжений: справочник / Пригоровский Н. И. - М. : Машиностроение, 1983. - 248 с. 4. Тимошенко С.П. Теория упругости / С.П. Тимошенко, Дж. Гудьер // М.: «Наука», 1975. – 576 с. 33 Учебное издание Поляков Алексей Афанасьевич Ковалев Олег Сергеевич ОПРЕДЕЛЕНИЕ ГЛАВНЫХ НАПРЯЖЕНИЙ ПРИ ПЛОСКОМ НАПРЯЖЕННОМ СОСТОЯНИИ Редактор Компьютерная верстка О.С. Ковалев ИД № 06263 от 12.11.2001 г. Подписано в печать Бумага писчая Плоская печать Уч.-изд. л. ____ Тираж _______ 34 Формат 60х84/16 Усл. печ. ______. Заказ ___________