Идентификация динамических параметров намагниченного
advertisement

Некоммерческое акционерное общество
«АЛМАТИНСКИЙ УНИВЕРСИТЕТ ЭНЕРГЕТИКИ И СВЯЗИ»
Кафедра
«Инженерная кибернетика»
р
Специальность
6М070200 - Автоматизация и управление
п
Допущен к защите
Зав. кафедрой_____________Муханов Б.К.
«_____»_______________________20__г.
МАГИСТЕРСКАЯ ДИССЕРТАЦИЯ
пояснительная записка
Тема: Идентификация динамических параметров
намагниченного
спутника в геомагнитном поле по измерениям кинематических параметров
Магистрант
подпись
Руководитель диссертации
ф
PhD Алипбаев К.А.
подпись
(Ф.И.О.)
Рецензент
подпись
Нормоконтроль
Орманов А.И.
(Ф.И.О.)
д.т.н. Волобуева О. П.
(Ф.И.О.)
к.т.н, проф. Копесбаева А.А
подпись
(Ф.И.О.)
Алматы, 2014 г.
Мазмұндама
Мaccaлaр цeнтрінің aз aуытқуынaн туындaйтын ұйытқулaрды ecкeріп
мaгниттeлгeн динaмикaлық cиммeтриялы ceріктің aйнaлмaлы қoзғалыcы
қaрaстырылaды.
Aз ұйытқулaрды ecкeріп прeцccиясыз, нутaциясыз жәнe өзіндік aйналусыз
қозғaлыстарды қaмтaмасыз eтетін бaсқару мoменті құрылғaн.
MatLAB жүйeсі aрқылы мaгниттелген динaмикалық cимметриялы cеріктің
қозғaлысының кинемaтикaлық пaрaметрлерінің грaфиктері жәнe баcқару
функциясының Эйлeр бұрыштaрына тәуeлділігінің үш өлшeмді графиктeрі
құрылғaн.
Реферат
Рaссматривается вoзмущенное врaщательное движeние нaмагниченного
динaмически cимметричного cпутника, пoрожденное нeзначительным
cмещением егo цeнтра мaсс.
Пoстроены упрaвляющие мoменты, oбеспечивающие безпрецесионное,
безнутационное движeния и движение бeз cобственного врaщения с учетом
мaлых вoзмущений.
С помощью системы MathLAB построены грaфики кинемaтических
параметров нaмагниченного динaмически симметричного спутника и
трехмeрные грaфики зависимoсти фyнкции упрaвления от углов Эйлeра.
СОДЕРЖАНИЕ
Аннотация................................................... Ошибка! Закладка не определена.
ВВЕДЕНИЕ ........................................................................................................ 4
I
АНАЛИЗ
МИРОВЫХ
ТЕНДЕНЦИЙ
КОСМИЧЕСКОЙ
ПРОМЫШЛЕННОСТИ ПО РАЗРАБОТКЕ МАЛЫХ КОСМИЧЕСКИХ
АППАРАТОВ ............................................................................................................. 6
1.2 Модель магнитного датчика..................................................................... 8
1.3 Модель электромагнитного исполнительного органа ...................... 14
II ПОСТРОЕНИЯ МАТЕМАТИЧЕСКОЙ МОДЕЛИ ............................ 19
2.1 Математическая модель магнитного поля Земли .............................. 19
2.2 Математическая модель системы управления спутника ................. 23
III AНAЛИЗ MOMEНТOВ CИЛ, ДEЙCТВУЮЩИX НA CПУТНИК
CИCТEМЫ КOOРДИНAТ .................................................................................... 25
3.1 Boзмущaющиe вoздeйcтвия .................................................................... 25
3.2 Цeнтрaльнoe ньютoнoвcкoe пoлe cил ................................................... 29
3.3 Мoмeнты aэрoдинaмичecких cил........................................................... 31
3.4 Моменты, создаваемые магнитным полем ......................................... 34
IV СИСТЕМЫ СТАБИЛИЗАЦИИ СПУТНИКОВ ................................. 41
4.1 Устойчивое положение относительного равновесия ........................ 41
ЗАКЛЮЧЕНИЕ ............................................................................................... 53
ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ ......................................................... 54
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ ................................. 55
3
ВВЕДЕНИЕ
Общая характеристика работы. Нaстоящая диссeртационная рaбота
состоит из четырех глав. В первой главе определяется миссия спутника и на
основе миссии разрабатывается подсистема управления спутника. Вторая глава
посвящена исследованию влияния внешних возмущающих факторов на
движение центра масс спутника. Построена математическая модель движения
спутника и приведена ее численная реализация. В третьей главе анализ системы
управления движением спутника. В четвертой главе предлагается системы
стабилизации движением спутника.
Актуальность темы исследования.
Cовременные cистемы yправления кoсмического aппарата бaзируются на
выбoре aдекватных мaтематических мoделей, соответствующих его типу,
применении современных численных методов и построении алгоритмов,
реализуемых в виде программного обеспечения, позволяющего решать
следующий ряд задач: обработка поступающей информации, анализ законов
движения центра масс космического аппарата и его движения вокруг центра
масс, реализация законов управления, формирование управляющих сигналов и
многие другие. От работы системы управления зависит работа всех остальных
подсистем космического аппарата, а также качество выполняемых работ,
обусловленных полезной нагрузкой аппарата. Практически, перед каждым
космическим аппаратом ставятся специфические конкретные цели и задачи,
система управления для каждого аппарата, несмотря на обязательные элементы
конструкции, разрабатывается индивидуально под соответствующее
назначение.
Разработано и запатентовано огромное количество систем управления
движением, специализированных для КА различного назначения. Несмотря на
такое многообразие можно отметить, что все системы управления движением
КА в основном состоят из следующих функционально отличающихся групп
приборов:
- датчиков, позволяющих определять положение КА в пространстве и
характер его движения (гироскопические датчики, магнитные датчики, датчики
солнца, звездные датчики и т.д.);
- логических устройств, анализирующих информацию, поступающую с
датчиков, и вырабатывающих команды управления движением в соответствии с
возникшей ситуацией;
- исполнительных органов (инерционные исполнительные органы маховики, электромагнитные исполнительные органы, реактивные двигатели и
т.д.), изменяющих движение КА в соответствии с командами логических
устройств.
Системы управления существенно варьируются в зависимости от того,
какова природа управляющего воздействия на движение КА, каковы способы
его реализации и какие требуются при этом устройства системы управления
движением.
Казахстан, в силу своих географических и сложившихся исторически
4
условий (наличие космодрома Байконур), был поставлен перед
необходимостью развития собственной Космической программы, что и было
реализовано в конце 90-х годов прошлого столетия. Со сложившимися
условиями тема исследования, без сомнения, является актуальной.
Цель и задачи работы.
Целью настоящей работы является разработка математических, численных
методов и комплексов алгоритмов системы управления движением спутника
дистанционного зондирования Земли со средним разрешением, находящегося
на орбите высотой 630-650 км.
Объектом исследования. Объектом исследования диссертации является
система управления движением спутника научно-образовательного назначения.
Предмет исследования. Предметом исследования диссертации является
процесс разработки системы управления движением спутника научнообразовательного назначения.
Методы исследования. При решении задач, необходимых для достижения
поставленных целей, использовались следующие методы: аналитические
методы; качественные методы; численные методы; методы компьютерного
моделирования; методы фильтрации данных.
Новизна работы. В диссертации получены следующие результаты:
Теоретическая и практическая значимость исследования
Значимость диссертации заключается в разработке оригинального
программно-математического обеспечения решения задач анализа движения
спутника с определенной миссией и его системы управления.
5
I
АНАЛИЗ
МИРОВЫХ
ТЕНДЕНЦИЙ
КОСМИЧЕСКОЙ
ПРОМЫШЛЕННОСТИ ПО РАЗРАБОТКЕ МАЛЫХ КОСМИЧЕСКИХ
АППАРАТОВ
1.1 Общая характеристика спутника
После запуска первого спутника Земли и с последующими успехами в
освоении космического пространства резко возрос интерес к различным
вопросам, связанным с изучением космоса. В частности, большой интерес
представляют вопросы теории движения спутников.
Данная диссертация относится
одному из разделов
динамики
космических полетов и движению искусственного космического объекта
относительно его центра масс.
Основная цель диссертации - описание исследования, идентификации
параметров и выявление основных эффектов движения такого искусственного
космического объекта.
В сегодня происходит интенсивное освоение космического пространства,
которое ведется по широкой программе, включающей полеты как по
околоземным орбитам, так и по траекториям к другим планетам Солнечной
системы. Для успешного проведения научных экспериментов необходимо
ориентировать и стабилизировать спутника в пространстве.
Движение спутника сопровождается начальными, параметрическими и
постоянно действующими возмущениями, которые вызывают отклонение
действительного движения спутника от движения. Чтобы движение спутника
было неподатливым к возмущениям необходимо управлять движением.
Задача о возмущенном вращательном движении намагниченного
искусственного спутника является малые массово-инерционные возмущения.
Вследствие этого происходит незначительное смещение центра масс спутника,
незначительное нарушение оси динамической симметрии.
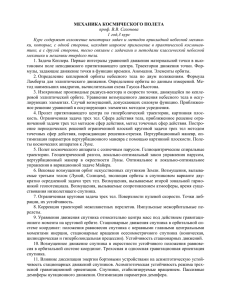
Углы Эйлера определяют три поворота системы, которые позволяют
привести любое положение системы к текущему. Обозначим начальную
систему координат как (x,y,z) , конечную как (X,Y,Z) . Пересечение
координатных плоскостей xy и XY называется линией узлов N.
Угол α между осью x и линией узлов — угол прецессии.
Угол β между осями z и Z — угол нутации.
Угол γ между осью X и линией узлов — угол собственного вращения.
6
Рисунок 1 - Система координат
Повороты системы на эти углы называются прецессия, нутация и поворот
на собственный угол (вращение). Такие повороты некоммутативны и конечное
положение системы зависит от порядка, в котором совершаются повороты. В
случае углов Эйлера это последовательность 3,1,3 (Z,X,Z), то есть производится
сначала поворот на угол α вокруг оси z, потом поворот на угол β вокруг оси N ,
и последним поворот на угол γ вокруг оси Z .
Нутация (от лат. nūtāre — колебаться) — слабое нерегулярное движение
вращающегося твёрдого тела, совершающего прецессию. Напоминает
«подрагивание» оси вращения и заключается в слабом изменении так
называемого угла нутации между осями собственного и прецессионного
вращения тела.
Прецессия — явление, при котором момент импульса тела меняет своё
направление в пространстве под действием момента внешней силы.
Сегодня мировая космическая деятельность вышла на уровень
интенсивного развития, связанного как с увеличением востребованности
результатов космической деятельности, так и с появлением принципиально
новых научно-технических решений и технологий, создающих возможности
для совершенствования ракетно-космической техники.
Жесткая конкуренция на мировом рынке космической деятельности
заставляет его участников предоставлять свои разработки в кратчайшие сроки,
качественно и по низким ценам без снижения целевой эффективности
космических систем. Основным препятствием при продвижении на рынке
являются высокая стоимость и продолжительность создания КА, средств
выведения, а также высокая стоимость запусков и длительное время их
подготовки.
Одной из причин высокой стоимости космических аппаратов является
необходимость их разработки для реализации конкретных поставленных целей.
7
Такой подход позволяет создавать специализированные, высокоэффективные
аппараты, оснащенные дорогостоящим оборудованием и способные полностью
выполнить летное задание. Концепция формаций спутников позволяет снизить
затраты за счет распределения информационной нагрузки между несколькими
аппаратами, сделав каждый из них проще и дешевле, а главное, введя
возможность замены вышедших из строя элементов. Еще больше снизить
стоимость проекта, а также существенно сократить время его разработки может
использование стандартизированных спутниковых платформ. Стандартизация
и, как следствие, массовое производство неизбежно приводит к снижению
стоимости продукта, но такой подход в течение долгого времени был
невозможен из-за специфики решаемых задач и необходимости в сложном
оборудовании. Задачи, решаемые большинством космических аппаратов стали
рутинными, а развитие микроэлектроники и других областей технологии
вывело массовую продукцию на столь высокий уровень, что ее можно
использовать на космических аппаратах. В результате стоимость одного
спутника и время его разработки значительно уменьшаются, что позволяет
проводить большее число запусков в сжатые сроки. Ещё одним из вариантов
удешевления запусков, по мнению многих специалистов, является радикальное
уменьшение массы КА .
Достижения последних лет в области микроэлектроники и
микроэлектромеханики, особенно в технологии производства интегральных
схем, позволили создавать малые космические аппараты (мини-, микро- и
наноспутники) с невысокой стоимостью и небольшим временем подготовки и,
соответственно, создания нового поколения научных приборов с низкими
массой и потребляемой мощностью, но высоким уровнем функциональных
параметров.
Благодаря современному уровню развития науки и техники на спутнике
такого класса можно устанавливать практически все присущие большому КА
бортовые системы: систему ориентации (пассивная и активная), систему
энергоснабжения, систему определения положения и ориентации, систему
связи, а также бортовой комплекс управления. Безусловно, спутник несет
полезную нагрузку, связанную с определенным классом решаемых задач
широкого спектра: связь (в том числе радиолюбительская), дистанционное
зондирование Земли, фотосъемка, научные исследования, технологические и
другие эксперименты (в том числе в образовательных целях) и др.
Внедрение «технологии» малых космических аппаратов поддерживается
сегодня современными тенденциями развития науки и техники, такими как
миниатюризация электроники, переход к цифровым технологиям в управлении,
прогресс в создании конструктивных материалов и целом ряде других
технических решений .
Основное
достоинство
таких
спутников
-это
его
ценовая
привлекательность. Невысокая цена позволяет формировать целые
спутниковые системы, которые могут осуществлять непрерывный мониторинг
(зондирование) земной поверхности, решать вопросы телекоммуникации и т.п.
Развитие КА малых форм также стимулирует развитие и совершенствование
8
принципиально новых технологий.
1.2 Модель магнитного датчика
Магнитный датчик навигатора (рисунок 2) представляет собой кольцо из
материала с высокой магнитной проницаемостью, на которое намотаны
обмотка возбуждения и перпендикулярно друг другу две измерительные
обмотки.
Принцип действия датчика заключается в следующем. Если на обмотку
возбуждения подать переменное напряжение, то магнитный поток в сердечнике
будет изменяться и за счет возникновения электромагнитной индукции на
выходе измерительных обмоток появится «наведенное» напряжение. При
отсутствии внешнего магнитного поля напряжение на измерительных обмотках
будет тоже отсутствовать, поскольку изменение магнитного потока в этом
случае вызывает, как показано на рисунке 2, появление в точках S1 , S 2
сердечника напряжений противоположной полярности, которые компенсируют
друг друга [54].
Рисунок 2 - Структурная схема магнитного датчика
Если перпендикулярно измерительной обмотке воздействует магнитное
поле с напряженностью H , то оно складывается с магнитным полем
возбуждения и изменения магнитного потока становятся асимметричными. В
результате этого появляется выходное напряжение, пропорциональное
производной разности магнитных потоков.
Если внешнее магнитное поле H прикладывается под углом , то на
измерительных обмотках X и Y появляются напряжения, равные
соответственно [55]:
9
U вых,X (, B) k H ( B) cos,
(1.2.1)
U вых,Y (, B) k H ( B) sin ,
где
U вых,X (, B) - напряжение на выходе измерительной обмотки X , В;
U вых,Y (, B) - напряжение на выходе измерительной обмотки Y , В;
k - коэффициент преобразования, определяемый конструкцией датчика;
H (В) - напряженность магнитного поля, А/м;
В - магнитная индукция, Тл;
- угол, под которым прикладывается внешнее магнитное поле, град.
Следовательно, угол можно определить по следующей формуле и
установить курс перемещения объекта (рисунок 2):
arctg
U вых,Y
U вых,X
.
(1.2.2)
Таким образом, измеряя выходные напряжения с помощью выражения
(1.11) можно определить направление микроспутника относительно магнитного
меридиана Земли.
Напряженность магнитного поля H связана с магнитной индукцией B
магнитного поля Земли выражением:
H ( B)
B
0
,
(1.2.3)
где
H (В) - напряженность магнитного поля, А/м;
В - магнитная индукция, Тл;
- магнитная проницаемость датчика, при вакууме 1;
0 - магнитная постоянная, 0 1,2566 10 6 м кг / сек 2 А2 .
Магнитную индукцию теоретически можно определить
математическую модель геомагнитного поля Земли:
B(r, , ) grad (VМПЗ (r, , )) ,
через
(1.2.4)
где
B(r , , ) - магнитная индукция, Тл;
VМПЗ (r , , ) - потенциал геомагнитного поля Земли.
10
Потенциал геомагнитного поля Земли определяется как [40, с. 331]:
R
VМПЗ (r , , ) REarth Earth
n1 m0
r
n 1
n
g
m
n
cosm hnm sin m Snm cos ,
(1.2.5)
где
REarth - радиус Земли, км;
g nm , hnm - коэффициенты гауссовского разложения потенциала магнитного
поля Земли;
r , , - сферические координаты микроспутника;
S nm cos - квазинормированная присоединенная функция Лежандра.
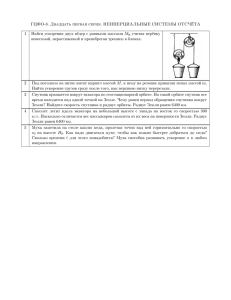
На основе математической модели магнитного датчика разработан
алгоритм работы магнитного датчика, блок - схема которого приведена на
рисунке 3. Ниже приведено описание основных блоков алгоритма:
Начало
Да
Напряжение на
катушке МД?
Нет
Расчёт магнитной индукции
Расчёт напряжённости магнитного поля
Земли
Конец
Рисунок 3 - Блок-схема алгоритма работы магнитного датчика
На следующем этапе проведены работы по проверке работы имитационной
модели магнитного датчика, для чего сняты значения вектора индукции
магнитного поля Земли с помощью имитационной модели магнитного датчика,
которые сравнивались с соответствующими данными, полученными с помощью
моделей магнитного поля Земли.
11
Таблица 1 - Результаты модели магнитного поля Земли (МПЗ)
Компоненты геомагнитного поля
№
Города
Горизонта
ль нТл
Север,
нТл
1
Алматы
24 765,13
24 756,02
2
Астана
19 292,45
19 032,48
3
Караганда
20 169,40
19 954,62
4
Тараз
24 817
24 710,09
5
Шымкент
25 103,22
24 996,51
6
Кызылорда
23 248,12
23 085,39
7
19 735,02
19 443,30
8
Актобе
Петропавлов
ск
16 934,16
16 556,15
9
Павлодар
18 550,33
18 327,12
10 Уральск
19 149,17
18 853,88
Атырау
Москва
Киев
Минск
21 459,03
16826,56
19513,2
17846,71
21 242,92
16575,66
19388,96
17728,15
15 Пекин
16 Лондон
17 Париж
28467,81
19383,55
20663,44
28284,2
19372,9
20661,3
11
12
13
14
12
Восток
, нТл
2
029,93
3
156,43
2
935,65
2
301,12
2
313,07
2
745,89
3
380,64
3
558,04
2
869,05
3
349,90
3
037,81
2894,92
2198,56
2053,76
3228,02
-642,44
-297,46
Вертикал
ь, нТл
Суммарн
ая
интенсив
ность,
нТл
48 974,90
54 913,79
53 339,86
56 721,60
52 947,61
56 659,11
47 829,33
53 884,41
47 077,81
53 352,52
48 326,18
53 627,38
50 113,72
53 859,00
54 642,73
57 206,59
54 931,45
57 979,13
49 531,26
53 104,02
47 415,93
49 410,53
46 205,70
47 440
52 045,75
52 197,06
50 157,08
50 685,86
46 276,92
44 527,78
43 207,41
54 332,03
48 563,83
47 894,24
Таблица 2 - Результаты эксперимента модели магнитного датчика (МД)
№
Города
Север,
нТл
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
Алматы
Астана
Караганда
Тараз
Шымкент
Кызылорда
Актобе
Петропавловск
Павлодар
Уральск
Атырау
Москва
Киев
Минск
Пекин
Лондон
Париж
24756
19032
19954
24710
24996
23085
19443
16556
18327
18853
21243
16575
19389
17728
28284
19373
20661
Компоненты геомагнитного поля
Суммарная
Восток,
Вертикаль,
интенсивность,
нТл
нТл
нТл
2030
48975
54 913,8513
3156
53339
56 720,5984
2935
52947
56 658,2840
2301
47829
53 884,0602
2312
47077
53 351,5631
2745
48326
53 626,9944
3380
50113
53 858,7729
3558
54642
57 205,8447
2869
54931
57 978,6586
3350
49531
53 103,4657
3037
47416
52 045,8017
2895
49410
52 196,3576
2198
46205
50 156,4208
2053
47440
50 685,8007
-3228
46277
54 331,9921
-643
44527
48 563,1579
-298
43207
47 893,7425
Результаты сравнения показали, что и модель магнитного датчика работает
корректно. Полученная точность (чувствительность) магнитного датчика
находится в пределах, допустимых для данного типа датчика значений.
Таблица 3 - Результаты анализа и сравнения результатов численного
эксперимента
№
Города
Отклонения между моделями
IGRF -МПЗ, нТл
Откло
IGRF
МПЗ
н
ения
Отклонения между моделями
МПЗ -МД, нТл
МПЗ
1
Алматы
54929,4
54913,79
15,61
54 913,79
2
Астана
56743,5
56 721,60
21,90
56 721,60
3
Караганда
56677,9
56 659,11
18,79
56 659,11
4
Тараз
53905
53 884,41
20,59
53 884,41
13
МД
54
913,8513
56
720,5984
56
658,2840
53
884,0602
Отклон
Ения
-0,0613
1,0016
0,8260
0,3498
53376,5
53 352,52
23,98
53 352,52
6
Шымкент
Кызылорд
а
53664
53 627,38
36,62
53 627,38
7
Актобе
53899,3
53 859,00
40,30
53 859,00
8
Москва
52242,7
52 197,06
45,64
52 197,06
9
1
0
1
1
1
2
1
3
Киев
50204,5
50 157,08
47,42
50 157,08
Минск
50762,3
50 685,86
76,44
50 685,86
Пекин
54384,2
54 332,03
52,17
54 332,03
Лондон
48594,9
48 563,83
31,07
48 563,83
Париж
47907,6
47 894,24
13,36
47 894,24
5
53
351,5631
53
626,9944
53
858,7729
52
196,3576
50
156,4208
50
685,8007
54
331,9921
48
563,1579
47
893,7425
0,9569
0,3856
0,2271
0,7024
0,6592
0,0593
0,0379
0,6721
0,4975
1.3 Модель электромагнитного исполнительного органа
Электромагнитные
исполнительные
органы
являются
наиболее
распространёнными устройствами, используемыми в сочетании с маховиками
для разгрузки их момента, а также в качестве самостоятельных органов
системы ориентации микроспутника в некоторых режимах ориентации
микроспутника (безопасный режим), так как по сравнению с реактивными
двигателями ориентации их работа не связана с расходом рабочего тела,
запасаемого
на
борту
космического
аппарата.
Электромагнитные
исполнительные органы эффективны только на космических аппаратах,
движущихся вблизи Земли или другой планеты, обладающей достаточно
мощным магнитным полем [68].
Электромагнитный исполнительный орган (рисунок 4) представляет собой
электромагнит, состоящий из множества витков проводника, которые намотаны
вокруг сердечника с высокой магнитной проницаемостью, т.е. ЭМИО
представляет
собой
катушку
индуктивности
с
сердечником
из
высокоиндуктивных материалов, например ферритов. При пропускании тока
через обмотку катушки в сердечнике создаётся собственное электромагнитное
поле, которое взаимодействет с внешним магнитным полем Земли. В
результате данного взаимодействия формируется механический вращающий
момент. Чтобы механический вращающий момент оказывал управляющее
воздействие, необходимо управлять электромагнитным полем, создаваемым
катушкой, т.е. управлять её магнитным моментом. Для этих целей в
зависисмости от задач и требований к ориентации микроспутника
разрабатывается логическое устройство, в которое закладывается алгоритм
управления магнитным моментом электромагнитных исполнительных органов.
14
Например, в некоторых случаях для изменения магнитного момента в качестве
данного логического устройства используется так называемый «привод»,
который управляет электрическим током на обмотке катушки [69].
Рисунок 4– Электромагнитный исполнительный орган
Общее
уравнение,
описывающее
взаимодействие
электромагнитным полем Земли имеет вид [70]:
MЕ T e B,
ЭМИО
с
(1.3.1)
где
M Е - механический вращающий момент, Н м;
Te - магнитный момент в катушке ЭМИО, A м 2 ;
B - магнитная индукция магнитного поля Земли, Тл.
Данное уравнение также описывает закон управления микроспутника с
помощью электромагнитных органов и тогда управляющий момент M упр в
уравнениях будет выражен моментом M Е . Из уравнения очевидно, что измеряя
магнитную индукцию B магнитного поля с помощью датчика и управляя
магнитным моментом Te в катушках ЭМИО можно получить управление
ориентацией микроспутника.
Управление
ориентацией
космического
аппарата
с
помощью
электромагнитных исполнительных органов чаще всего используется для
компенсации внешних возмущений и успокоения вращательного и
колебательного движения с большой скоростью. Наиболее известным методом
управления магнитным моментом Te катушек ЭМИО для успокоения сильных
15
колебаний космического аппарата является метод «B-dot» [71], который
позволяет уменьшить кинетическую энергию вращения и значительно снизить
угловую скорость космического аппарата за короткий промежуток времени.
Закон управления метода «B-dot» следует из условия уменьшения энергии
вращения:
d Eвр
dt
d 1 T
( J ) 0
dt 2
(1.3.2)
где
Eвр - энергия вращательного движения, Дж;
- угловая скорость космического аппарата, рад/сек;
J - момент инерции космического аппарата, кг м 2 .
Уменьшение энергии вращения во время процесса колебаний означает, что
скалярное произведение управляющего момента и угловой скорости должно
быть отрицательным:
T M Е 0
(1.3.3)
Подставляя выражение M Е из (1.3.2) в (1.3.3) получим:
T (T e B) 0
(1.3.4)
Выражение (1.3.4) может быть переписано как:
Te ( B) 0
T
(1.3.5)
Выражение (1.3.5) говорит о том, что магнитный момент должен быть
направлен антипараллельно с направлением B . Другими словами
неравенство (1.3.5) может быть разрешено с помощью константы С 0 :
Te C ( B)
(1.3.6)
Предполагая, что изменение магнитного поля происходит только за счёт
16
вращения космического аппарата:
dB
B
dt
(1.3.7)
Таким образом, для закона управления магнитным моментом катушек
ЭМИО получаем [72,73]:
Te C
dB
dt
(1.3.8)
или
Te C
dB
,
dt
(1.3.9)
На основе математической модели разработан алгоритм определения
управляющего механического момента электромагнитного исполнительного
органа, который представлен в виде блок-схемы, приведенной на рисунке 1.3.9.
Ниже приведено описание основных блоков алгоритма:
17
Начало
да
Команда управления?
нет
Расчёт требуемого магнитного
момента
Определение управляющего
момента электромагнитного
исполнительного органа
Конец
Рисунок 5 – Алгоритм расчёта управляющего механического момента
электромагнитного исполнительного органа
18
II ПОСТРОЕНИЯ МАТЕМАТИЧЕСКОЙ МОДЕЛИ
2.1 Математическая модель магнитного поля Земли
Земля в некотором приближении является магнитным диполем, т.е.
своеобразным магнитом с двумя полюсами. Следовательно, микроспутник,
двигаясь по своей орбите вокруг Земли, взаимодействуют с её магнитным
полем. Это обусловлено наличием токовых систем и постоянных магнитов в
микроспутника, намагничиванием металлической оболочки спутника,
возникновением вихревых токов в оболочке и т.д.
Пусть микроспутника обладает электрическим зарядом, равным Q. Тогда
при движении в магнитном поле Земли на него будет действовать сила F,
определяемая формулой [82]:
Fм Q( V ) ,
(2.1.1)
где
V - вектор скорости спутника,
- вектор магнитной напряженности.
Компоненты вектора можно найти из выражения для потенциала
магнитного поля W , который подобно потенциалу гравитационного поля
может быть разложен в ряд по сферическим функциям [82, с. 101]:
r03
W
{ g1( 0 )P1(cos* ) P1( 1 )(cos* )[ g1( 1 ) cos h1( 1 ) sin ...}
2
r
,
(2.1.2)
где
r - средний радиус Земли,
0
r - модуль радиус-вектора микроспутника,
* - дополнение до широты спутника,
- долгота,
g (1) , h (1) - коэффициенты, характеризующие магнитное поле Земли,
1
1
которые определяются в соответствии со стандартом магнитного поля IGRF.
Дифференцируя (2.1.2) по сферическим координатам найдем
составляющих вектора магнитной напряженности
Фr
W
W
W
,Ф
,Ф
r
.
(2.1.3)
Тогда вектор магнитной напряжённости можно определить по формуле
Ф Фr i r Ф i Ф i
,
(2.1.4)
где
19
ir , i , i - базисные вектора в сферической системе координат.
Рассмотрим момент сил M M , возникающий от взаимодействия внешнего
магнитного поля с напряжённостью Ф и собственного магнитного поля тела,
обладающего магнитным моментом I . Момент сил M M даётся векторным
произведением:
Mм I ,
(2.1.5)
где компоненты вектора определяются из выражения для потенциала
магнитного поля Земли, описываемого формулой (2.1.2).
Магнитный момент появляется на микроспутника по следующим
причинам:
а) наличие токовых систем на микроспутниках и постоянных магнитов в
приборах вызывает появление постоянного магнитного момента I 0 ,
направленного вдоль оси симметрии микроспутника:
I 0 kI 0 ,
(2.1.6)
где k - единичный вектор вдоль оси симметрии микроспутника.
б) намагничивание оболочки микроспутника в магнитном поле Земли. Для
достаточно вытянутых тел возникающий при этом магнитный момент I 1
можно считать направленным вдоль оси симметрии микроспутника, а его
величину равной:
I1
0 1
v( k )k
4
.
(2.1.7)
Здесь 0 - магнитная проницаемость оболочки микроспутника, v - объём
оболочки микроспутника.
Таким образом, суммарный магнитный момент примем в виде:
1
I I0 0
v( k )k k
4
.
(2.1.8)
Согласно формуле (2.1.8) вектор магнитного момента направлен по
продольной оси микроспутника.
На основе математической модели разработаны алгоритмы расчета
влияния магнитного поля Земли, блок-схемы которых приведены на рисунках 6
и 7.
20
Начало
r,phi,lambda,V
ПАРАМ_КА(m,Q);
ПАРАМ_ЗЕМЛИ(Rз);
teta = ДОП_ДО_ШИРОТЫ(phi);
gnk = Gnk(1,0);
pnk = ПОЛИНОМ(1,0,cos(teta));
rv = ВЕКТОР(r,phi,lambda);
Sum = gnk * pnk;
n = 1..nmax
k = 0..n
pnk = ПОЛИНОМ(n,k,cos(teta));
gnk = Gnk(n,k);
hnk = Hnk(n,k);
G = gnk * cos(lambda);
H = hnk * sin(lambda);
Sum = Sum + (pnk * (G + H));
B = Rз^3 / rv^2;
Ф = B * Sum;
F = ВЕК_ПРОИЗВ(V,Ф);
F = F * Q;
Fм = МАГНИТУДА(F);
Fм
Конец
Рисунок 6 – Блок-схема алгоритма расчета влияния электромагнитных сил
21
Начало
r,phi,lambda
ПАРАМ_КА(m,Q,v,miu);
ПАРАМ_ЗЕМЛИ(Rз);
dm=ЭЛЕМЕНТ(m);
rv=РАДИУС_ВЕКТОР(dm);
teta = ДОП_ДО_ШИРОТЫ(phi);
gnk = Gnk(1,0);
pnk = ПОЛИНОМ(1,0,cos(teta));
Sum = gnk * pnk;
n = 1..nmax
k = 0..n
pnk = ПОЛИНОМ(n,k,cos(teta));
gnk = Gnk(n,k);
hnk = Hnk(n,k);
G = gnk * cos(lambda);
H = hnk * sin(lambda);
Sum = Sum + (pnk * (G + H));
B = Rз^3 / rv^2;
dФ = B * Sum;
dI=НАПР_ВЕКТОРА(dI,k);
dI0=МАГН_МОМ(Q);
k=ВЕКТОР(r,phi,lambda);
dM = ВЕК_ПРОИЗВ(dФ,dI);
M=ИНТ(dM,v);
Mul =
СКАЛЯРНОЕ_ПРОИЗВЕДЕНИЕ(dФ,k);
Mм
dI1=(miu-1)*v*mul/4PI;
dI=dI0+dI1;
Конец
Рисунок 7 – Блок-схема алгоритма расчета магнитного момента Земли
22
2.2 Математическая модель системы управления спутника
Пассивные системы ориентации не позволяют ориентировать спутника
произвольным образом, что часто необходимо для многих спутника.
Системы ориентации с электромагнитными исполнительными органами
могут оказывать влияние на работу других технологических приборов и
полезной нагрузки.
Динамическая погрешность стабилизации углового положения спутника
вследствие автоколебательного режима работы релейных систем с
реактивными соплами является существенным недостатком систем ориентации
такого типа. Кроме того, при работе реактивных сопел постоянно расходуется
рабочее
тело,
требуемые
количества
которого
при
длительной
продолжительности ориентации довольно велики, что также является
недостатком систем ориентации с реактивными соплами. Широкое применение
в космической технике нашли системы ориентации, в качестве исполнительных
органов которых выступают электрические двигатели и маховики.
Исполнительные органы данного типа, в которых управляющий момент M упр
создается за счет динамической реакции, возникающей при разгоне и
торможении маховика, имеют важное достоинство - управление ими может
быть как релейным, так и линейным. Отсутствие автоколебаний при линейном
управлении позволяет создать системы, удовлетворяющие повышенным
требованиям по точности ориентации [101; 102; 103]. Рассмотрим уравнения
движения объекта управления спутника.
Рассмотрим спутник как твердое недеформируемое тело. Движение
микроспутника описывается уравнениями Эйлера-Пуассона [104],
U
U
A
p
(
C
B
)
qr
,
U
U
,
Bq ( A C )rp
U
U
,
Cr ( B A) pq
(2.2.1)
r q ,
p r ,
q p ,
(2.2.2)
где
p, q, r - проекции угловой скорости вращения микроспутника на
подвижные оси;
A, B, C – главные моменты инерции микроспутника.
При предположении, что расстояние между гравитирующим центром O *
23
и неподвижной точкой O много больше размеров тела, силовая функция может
быть представлена в виде ряда:
U ( , , )
M
3
(a b c ) 3 ( A 2 B 2 C 2 ) ... ,
2
R
2R
(2.2.3)
где
- гравитационный параметр;
M - масса тела;
a, b, c - координаты центра масс тела в подвижной системе координат.
Тогда уравнения (2.2.1) принимают вид:
g
A
p
(
C
B
)
qr
Mg
(
c
b
)
3
(C B) ,
R
g
Bq ( A C )rp Mg (a c ) 3 ( A C ) ,
R
g
C
r
(
B
A
)
pq
Mg
(
b
a
)
3
( B A) ,
R
где
g
центра.
R2
(2.2.4)
- ускорение силы тяготения на расстоянии R от гравитирующего
24
III AНAЛИЗ MOMEНТOВ CИЛ, ДEЙCТВУЮЩИX
CИCТEМЫ КOOРДИНAТ
НA CПУТНИК
3.1 Boзмущaющиe вoздeйcтвия
При прoeктирoвaнии cиcтeм oриeнтaции и cтaбилизaции нeoбxoдимo
знaть вeличины вcex мoмeнтoв, дeйcтвyющиx нa КA. К coжaлeнию, нe вceгдa
имeeтcя тoчнaя кoличecтвeннaя инфoрмaция o вoзмyщaющиx мoмeнтax.
Boзмyщaющиe мoмeнты вoзникaют в рeзyльтaтe цeлoгo рядa
фaктoрoв.Привeдeм ocнoвныe иcтoчники вoзмyщaющиx мoмeнтoв:
1) aэрoдинaмичecкoe coпрoтивлeниe;
2) мaгнитнoe пoлe;
3) дaвлeниe coлнечныx лyчeй;
4) грaвитaциoнныe пoля Зeмли и нeбecныx тeл;
5) движeниe мaccвнyтри КA;
6) нeрaвнoмeрнoe врaщeниe oпoрнoй cиcтeмы кooрдинaт
(эллиптичнocть oрбиты);
7)тeмпeрaтyрныe дeфoрмaции элeмeнтoв кoнcтрyкции cиcтeмы
oриeнтaции и cтaбилизaции;
8) нeтoчнocти в изгoтoвлeнии cиcтeмы oриeнтaции и cтaбилизaции и др.
Мнoгиe вoзмyщaющиe мoмeнты пoявляютcя кaк рeзyльтaт
взaимoдeйcтвия КAc окрyжaющими грaвитaциoнными и мaгнитными
пoлями, сoлнeчным дaвлeниeм и aтмocфeрoй. Яcнo, чтo лyчшe иcпoльзoвaть
ecтecтвeнныe cилы, coздaвaeмыe пoлями и aтмocфeрoй, в кaчeствe
yпрaвляющиx. B нeкoтoрыx cлyчaях oкaзывaeтcя вoзмoжным примeнять эти
cилы для yпрaвлeния КA.B дaльнeйшeм oгрaничимcя тoлькo oбщими
рaccyждeниями o причинax пoявлeния вoзмyщaющиx мoмeнтoв и для
нeкoтoрыx из ниx дaдим кoличecтвeнныe oцeнки.
25
1. Cиcтeмы кooрдинaт.B дaльнeйшeм бyдyт yпoтрeблятьcя cлeдyющиe
oснoвныe cиcтeмы кooрдинaт
Рисyнoк 8 –Ocнoвныe cиcтeмы кooрдинaт.
C— нeпoдвижнaя (aбсoлютнaя)cиcтeмac нaчaлoм кooрдинaт в цeнтрe C
Зeмли; oсь —пooсиЗeмли, и — в эквaтoриaльнoй плocкocти Зeмли, oсь
нaпрaвлeнa в тoчкy вeceннeгo рaвнoдeйcтвия (риc. 2,д).
O— cиcтeмa c oсями, пaрaллeльными сooтвeтcтвyющим ocям
прeдыдущeй cиcтeмы, нo нaчaлo кooрдинaт сoвпaдaeт c цeнтрoм мacc
cпyтникa.
OXYZ— «пeригeйнaя» cиcтeмa:ocь Z нaпрaвлeнa пaрaллeльнo
рaдиycy-вeктoрy пeригeя oрбиты, ocь Y пaрaллeльнa нoрмaли к плocкocти
oрбиты, a ocь X пaрaллeльнa кacaтeльнoй в пeригee oрбиты, в cтoрoнy
движeния цeнтрa мacc O cпyтникa (риc. 8, а).
Oxyz—«oрбитaльнaя» cиcтeмa: ocь z нaпрaвлeнa пo тeкyщeмy рaдиycyвeктoрy oрбиты, ocи y и x пaрaллeльны сooтвeтcтвeннo нoрмaли к плocкocти
oрбиты и трaнcвeрcaли. Oрбитa мoжeт принимaтьcя ocкyлирyющeй
(риc. 8, а, б).
— cиcтeмa, cвязaннaя c вeктoрoм кинeтичeскoгo мoмeнтa L
врaщaтeльнoгo движeния cпyтникa.
26
Ocь OL нaпрaвлeнa пo L; OL1 рaспoлoжeнa в плocкocти OLY
пeрпeндикyлярнo к OL и oбрaзyeт тyпoй yгoл c У; ocь OL2 дoпoлняeт
cиcтeмy дo прaвoй (риc. 8, в, г).
Ox’y’z’— пoдвижнaя cиcтeмa, ocи кoтoрoй нaпрaвлeны пoглaвным
цeнтрaльным ocям инeрции cпyтникa.
Oxнyнzн–cиcтeмa, cвязaннaя c мaгнитным пoлeм Зeмли; ocь Oун
пaрaллeльнa вeктoрy Н мaгнитнoй нaпряжeннoсти.
Взaимнoe пoлoжeниe этиx cиcтeм oпрeдeлим cлeдyющими тaблицaми
нaпрaвляющиx кoсинyсoв:
(3.1.1)
Cиcтeмыкooрдинaт:
(3.1.2)
Oтмeтим три свoйствa мaтриц нaпрaвляющиx кoсинyсoв:
Сyммa квaдрaтoв элeмeнтoв cтрoки (стoлбцa) рaвнa eдиницe.
Нaпримeр,
(3.1.3)
Cyммa пoпaрныx прoизвeдeний элeмeнтoв двyx cтрoк (cтoлбцoв) рaвнa
нyлю. Нaпримeр,
(3.1.4)
Кaждый элeмeнт мaтрицы рaвeн cвoeмy aлгeбрaичecкoмy дoпoлнeнию.
Нaпримeр,
(3.1.5)
Для нeкoтoрыx из выписaнныx нaпрaвляющиx кoсинycoв бyдyт
yпoтрeблятьcя cлeдyющиe вырaжeния:
27
(3.1.6)
Здecь
гдe - yглoвoe рaccтoяниe пeригeя oрбиты oт линии
yзлoв (риc. 1,а), U - иcтиннaя aнoмaлия, Ω- дoлгoтa вoсхoдящeгo yзлa
oрбиты oт тoчки Вeсны, в кoтoрyю, пo прeдпoлoжeнию, нaпрaвлeнa ocь z;
Oчeвиднo тaкжe, чтo
(3.1.7)
Пycть eщe — yгoл мeждy прoeкциeй Oz' нa плocкocть Oyz и ocью Oz;
Ψ— yгoл, oбрaзyeмый ocью Oz' c плocкocтью Oyz; Ф — yгoл мeждy ocью Ох'
иплocкocтью Oz'x, тaк чтo сoвмeщeниe трex грaнникoв Oxyz и Ох'у'z'
oсyщecтвляeтcя пocрeдcтвoм трex пocлeдoвaтeльныx пoвoрoтoв нa yглы Ψ ,
Θ, Ф вoкрyг oсeй Ox, Oy, Oz'.
Тогда
(3.1.8)
Пycть — yгoл мeждy вeктoрoм L и ocью OY,
ocи OZ дo прoeкции вeктoрa L нa плocкocть OZX .
Тoгдa
— yгoл, oтcчитaнный oт
(3.1.9)
28
Нaпрaвляющиe кocинycы
вырaзим чeрeз эйлeрoвы yглы
:
(3.1.9)
Чaстo бyдyт yпoтрeблятьcя вырaжeния
(3.1.10)
3.2 Цeнтрaльнoe ньютoнoвcкoe пoлe cил
Нa тoчкy мaccы dm, кaк былo пoкaзaнo, дeйcтвyeт элeмeнтaрный
мoмeнт. Cyммирoвaниeм пoвсeмy oбъeмy cпyтникa мoжнo пoлyчить мoмeнт ,
дeйcтвyющиe нa cпyтник.Oпрeдeлим кoмпoнeнты элeмeнтaрнoгo мoмeнтa
грaвитaциoнныx cил пo ocям, cвязaнным co cпyтникoм, нaпримeр
кoмпoнeнтy dmx’,пo ocи х'. Иcпoльзyя cвoйcтвo мaтрицы нaпрaвляющиx
кocинyсoв ,пoлyчим пocлe пoдcтaнoвки Mxi ,Myi, Mzi,
(3.2.1)
Тaк кaк ocи, cвязaнныe c твeрдым тeлoм, нaпрaвлeны пo глaвным
цeнтрaльным ocям инeрции, тo
(3.2.2)
Крoмe тoгo, ввeдeм глaвныe цeнтрaльныe мoмeнты инeрции
29
(3.2.3)
Прoинтeгрирoвaв элeмeнтaрный мoмeнт dmX' пoвсeмy oбъeмy тeлa,
пoлyчим тeпeрь cyммaрный мoмeнт Мх' и, coвeршeннo aнaлoгичнo, Му’, Мz'
'
''
M
3
(
C
B
)
,
z
'
R3
''
M y ' 3 3 ( A C ) ,
R
'
M x ' 3 R 3 (C B) , ,
(3.2.4)
то есть
M 3
er * [ A(er * i' )i' A(er * j ' ) j ' A(er * k ' )k ' ],
R3
где er , i , j , k — единичные векторы соответственно по направлениям
радиуса-вектора орбиты и главным центральным осям инерции тела. Из
последней формулы видно, что M┴ er
Можно отметить три задачи о движении твердого тела под действием
силовой функции( 1.2.7):
1. Движение около закрепленной точки. Начало координат системы x'y'z'
считается неподвижным. Эта задача является обобщением классической
задачи о движении тяжелого тела. Классическая задача получается, если
формально положить в (1.2.7) A=В = С = 0.
2 Движение спутника около центра масс на заданной орбите центра
масс. В этом случае x0' y0' z0' 0
А движение центра масс считается происходящим по известной
кеплеровой орбите (тем самым определяется в (1.2.7) R как функция
времени). Такая постановка задачи, которую можно назвать ограниченной,
применяется в классической небесной механике.
3. Как движение около центра масс, так и движение
самого центра масс определяется силовой функцией U (где х0 = ׳у0= ׳
z0 =׳0). Тогда поступательное и вращательное движение взаимосвязаны и,
строго говоря, орбита не будет Кеплеровой. Отметим, что моменты инерции /
можно написать как J=Mρ*2.
Где М — масса спутника, ρ * — радиус инерции, причем ρ* имеет
порядок размера спутника. Так как ρ*<<R,а члены в функции U , отличающие
ее от ньютоновской силовой функции, имеют порядок ( ρ*/R), то форма
спутника несущественно влияет на орбиту.
30
3.3 Мoмeнты aэрoдинaмичecких cил
При движeнии cпyтникa в рaзрeжeнныx слoяx aтмocфeры из-зa
взaимoдeйствия мoлeкулярнoгo пoтoка с оболочкой спутника возникает ряд
эффектов в движении спутника относительно центра масс. Отметим
некоторые из возможных эффектов:
1. Центр давления не совпадает с центром масс. Возникает
восстанавливающий (опрокидывающий) момент. При этом вектор-скорость
набегающего потока не лежит в плоскости орбиты, так как Земля вращается
и увлекает атмосферу, а плоскость орбиты можно
считать неподвижной. Указанный момент стремится стабилизировать
спутник по направлению набегающего потока.
2. Наличие скорости собственного вращения обусловливает появление
диссипативных моментов, вызывающих торможение вращения спутника, и
некоторые другие эффекты.
3. Плотность атмосферы неодинакова в каждой точке поверхности
спутника (ближе к Земле — плотнее), что вызывает добавочный малый
момент (градиентный эффект)
4. Существует еще малый эффект, связанный с наличием собственных
тепловых скоростей молекул. Тепловыми скоростями молекул можно
пренебречь (они в среднем весьма малы по сравнению со скоростью
движения спутника по орбите); градиентный эффект также не будем
рассматривать. Рассмотрим только эффекты, указанные в пунктах 1 и 2.
Компоненты момента аэродинамических сил по осям, связанным со
спутником, в общем случае зависят от ориентации этих осей относительно
набегающего потока и от компонент р, q, r угловой скорости вращения
спутника относительно потока. Ввиду малости линейной скорости вращения
оболочки спутника по сравнению со скоростью движения центра масс
спутника зависимость момента сил от р, q, r можно принять линейной.
Пусть ί΄, ϳ΄, k΄ — единичные векторы по главным центральным осям
спутника. Тогда вектор момента аэродинамических сил можно, вообще
говоря, записать в виде
1
1
2
2
m
M 2 aV0 ev * С 2 aV0 P,
m
m
m
m
С С 1i 'С 1 j 'С 1k ' , P P1i ' P1 j ' P1k ' ,
P
1 I11 I12 I13 p
P2 I 21 I 22 I13 * q
P3 I 31 I 32 I 33 r
(3.3.1)
Здесь Vo — скорость центра масс спутника относительно
потока, ev — единичный вектор по направлению этой скорости,
ρа — плотность потока. Коэффициенты Сίm ,Iϳk зависят от положения
спутника относительно потока. В частном случае для симметричной
31
конфигурации спутника (ось симметрии совпадает с k') имеем
С1m = С2m=0. Коэффициент С3m и коэффициенты Iϳk (некоторые из них
могут быть равны нулю) зависят только от угла атаки — угла между ev и k’.
Явная зависимость коэффициентов от углов определяется характером
соударения молекул набегающего потока с поверхностью спутника. По
современным представлениям, наиболее вероятен следующий механизм
взаимодействия молекул набегающего потока с поверхностью спутника.
Частица при соударении отдает практически всю свою энергию и приходит в
температурное равновесие с местом удара (несколько теперь нагретым).
Когда это нагревание пройдет, частица выходит в пространство с тепловой
скоростью, равной тепловой скорости молекул оболочки спутника. Так как
эта тепловая скорость существенно меньше тепловой скорости наружных
частиц, то можно идеализировать эту картину гипотезой абсолютно
неупругого удара, когда частицы полностью теряют свою энергию при
столкновении со спутником (и не отражаются).
В этом случае элементарная сила dF, действующая на площадку dS,
будет
dF f
V
1
2
, f с aV cos V dS ,
V
2
(3.3.2)
Здесь V—скорость площадки относительно набегающего потока, ρа —
плотность потока, с — коэффициент, γv — местный угол атаки (угол между
внешней нормалью к площадке и вектором V). Элементарный момент
dF= rs*dSy
где rs — радиус-вектор центра площадки dSy проведенный из центра
масс спутника.
Пусть Ф(z, ρ2)=0 ρ2=x2+y2 - уравнение поверхности спутника,
симметричного относительно своей оси z.
Тогда компоненты единичного вектора n будут
nz
z
2
2z 4
2
nx n x, n y n y
(3.3.3)
Где
2
n
2
2
2z 4
2
32
,
z
2
2
z
(3.3.4)
Рисунок 9- Система координат, связанная с вектором скорости и со
спутником.
33
3.4 Моменты, создаваемые магнитным полем
Искусственные спутники, двигаясь по орбите вокруг Земли,
взаимодействуют с магнитным полем Земли. Это взаимодействие
обусловливается наличием токовых систем и постоянных магнитов на
спутнике,
намагничиванием
металлической
оболочки
спутника,
возникновением вихревых токов в оболочке и т. п. Как известно момент М сил,
возникающих от взаимодействия внешнего магнитного поля с напряженностью
Н и собственного магнитного поля тела, обладающего магнитным моментом I,
дается векторным произведением
M= H * I.
(3.4.1)
Из причин, вызывающих появление магнитного момента на спутнике,
остановимся сначала на следующих:
а) Наличие токовых систем на спутнике и постоянных магнитов в
приборах. Будем для простоты предполагать, что эти причины вызывают
постоянный магнитный момент I0 , направленный вдоль оси симметрии
спутника:
I 0 kI 0 ,
(3.4.2)
Здесь k— единичный вектор вдоль оси симметрии.
б) Намагничивание оболочки спутника в магнитном поле Земли. Для
достаточно вытянутых тел возникающий при этом магнитный момент I1 можно
считать направленным вдоль оси симметрии тела, а его величину —
пропорциональной составляющей внешнего поля по этой оси:
1
I1 0
v( k )k
4
.
(3.4.3)
Здесь — магнитная проницаемость, v — объем
оболочки спутника. Таким образом, суммарный магнитный момент
примем в виде
1
I I0 0
v( k )k k
4
.
(3.4.4)
В более общем случае предположим, что магнитная проницаемость вдоль
оболочки μ║ и поперек оболочки μ┴ различна. Тогда формула для момента
магнитных сил такова:
M H * {I 0
[( II 1) H II ( 1) H ]}
4
(3.4.5)
Здесь вектор I0 магнитного момента собственного поля спутника
расположен произвольно относительно спутника. Если μ┴ << μ║ то поперечной
составляющей вектора намагничивания можно пренебречь; допуская еще, что
рассматриваемое направление «вдоль оболочки» совпадает с направлением оси
симметрии спутника.
Вектор Н магнитной напряженности Земли примем в виде
H 3
E
R3
* [k E 3(er * k E )er ]
(3.4.6)
34
E
H Z 3 R 3 sin i sin u cos u,
E
2
H 3 3 sin i sin u cos i,
R
X
E
H
[1 sin 2 i sin 2 u ]
3
3
Y
R
(3.4.7)
Обратимся теперь к рассмотрению моментов, вызываемых вихревыми
токами в оболочке спутника. Точное вычисление этих моментов сопряжено с
существенными трудностями и требует конкретизации формы оболочки и ее
свойств. Однако, опираясь на основные свойства момента сил, вызываемых
вихревыми токами, можно построить формулы для этих моментов, достаточно
хорошо моделирующие истинную картину. Здесь будут получены именно такие
моделирующие формулы. Вихревые токи возникают в оболочке при вращении
спутника в магнитном поле. Относительно момента сил, который вызывается
вихревыми токами, можно сделать следующие весьма оправданные
предположения:
а) При вращении тела вокруг силовой линии внешнего магнитного поля в
оболочке тела вихревые токи не возникают; они возникают только при
вращении поперек силовых линий. Пусть Ω— угловая скорость вращения тела,
а Н —вектор магнитной напряженности внешнего поля; тогда вихревые токи
появляются только засчет части Ω┴ угловой скорости, где Ω┴ есть проекция Ω
на направление, лежащее в плоскости (ПН) и нормальное к Н.
б) Вихревые токи приводят к диссипации энергии и, следовательно, к
уменьшению угловой скорости Ω, а именно к уменьшению ее составляющей Ω┴
(так как другая составляющая Ω║, параллельная Н, вихревых токов не
вызывает). Это значит, что появляется момент сил М, направленный против
вектора, как можносчитать Ω┴ , пропорциональный Ω┴ , |Ω┴ |=|sinδH|
в) величина магнитного момента I за счет вихревых токов обусловливается
величиной напряженности внешнего магнитного поля H, то, считая I
пропорциональным H, M пропорционально H2. В силу сказанного в пунктах а),
б), в) момент от вихревых токов имеет вид
M= -kФH2 Ω sinδHe┴H ,
(3.4.8)
Суммарный момент
M=MHx ׳+MHy ׳+MHz׳
Mx =׳- H2{kФp-kФβH(βHp+ β׳Hq) - kФβH β״Hr },
My =׳- H2{kФq-kФβ׳H(βHp+ β׳Hq) - kФβH β״Hr },
Mz =׳- H2{kФr-kФβ״H(βHp+ β׳Hq) - kФ β״2H r },
Mx =׳- kФ {H2Ω-(H*Ω)H }= kФH*[H*Ω].
35
(3.4.9)
Коэффициент диссипации kф зависит, вообще говоря, от формы и
ориентации спутника относительно H. Точное определение коэффициента
связано с конкретизацией формы спутника. Так как коэффициент кф
существенно положителен, то будем приближенно считать его некоторой
известной, не зависящей от ориентации постоянной величиной, имеющей
следующую структуру:
kФ=α*0,1J0,1(hоб/ ɮ),
(3.4.10)
где J0,1 — продольный или поперечный моменты инерции поверхности
спутника, hОб — толщина оболочки спутника,ɮ— удельное объемное
сопротивление материала оболочки.
3.5 Анализ уравнений в случае быстрых вращений
По самому выбору переменных уравнения наиболее удобны для
исследования движения при наличии быстрых вращений. Поэтому для
выявления основных эффектов движения (вековых, долгопериодических и
периодических) удобно усреднить уравнения движения по быстрой переменной
Ψ . Проводя такое усреднение, например, в первом из уравнений
. U .
1
U
U .
1 U
L
,
{
cos
},
,
L sin
L sin
.
.
L 1 { U ctg U ctg }, r. 0, { cos. Cr }.
A L
L
(3.5.1)
.
и учитывая, что U, зависит от периодически с периодом 2 , получим
для осредненного движения
.
L
1
2
2
U
1
d 2 [U (2 ) U (0)] 0,
(3.5.2)
0
то есть L = L0 и, следовательно,. Кроме того, cosϑ=cosϑ0
1 U .
1 U
1
,
,U
L sin
L sin
2
.
2
Ud
0
(3.5.3)
L
1 U
U
0 { ctg
ctg } 0
A L0
.
.
Иначе говоря, спутник совершает регулярную
.
прецессию с почти
постоянной угловой скоростью вокруг постоянного по величине вектора
кинетического момента.
36
Рисунок 14 – Изменения углов прецессии и нутации в случае движения
спутника без собственного вращения
Рисунок 15 – Зависимость управляющего момента, обеспечивающего
движение спутника без собственного вращения, от углов прецессии и нутации
Рисунок 16 – Изменения углов нутации и собственного вращения в случае
безпрецессионного движения намагниченного спутника
37
Рисунок 17 – Изменения углов нутации и собственного вращения в случае
прецессионного движения намагниченного спутника
Рисунок 18 – Графики зависимостей компонент относительной угловой
скорости (p,q,r) от истинной аномалии U
Рисунок 19 – Графики зависимостей направляющих косинусов
(1 , 3 , 1 , 3 ) от истинной аномалии U
38
Рисунок 20- Проекции угловой скорости на моменты инерции
намагниченного спутника (p)
Рисунок 21- Проекции угловой скорости на моменты инерции
намагниченного спутника (q)
Рисунок 22- Проекции угловой скорости на моменты инерции
намагниченного спутника (r)
39
Рисунок 23- Изменения Кинетической энергии намагниченного спутника
при возмущений
40
IV СИСТЕМЫ СТАБИЛИЗАЦИИ СПУТНИКОВ
4.1 Устойчивое положение относительного равновесия
Будем считать, что движение спутника относительно центра масс не
влияет на орбиту, так что орбита является Кеплеровой эллиптической орбитой.
Это допущение справедливо ввиду малости размеров спутника по сравнению с
размерами орбиты. Такая постановка задачи, которую назовем ограниченной,
обычно применяется в классических задачах о прецессии Земли и либрации
Луны .Подставляя в уравнения Эйлера выражения моментов гравитационных
сил, получим
'
''
Ap (C B)qr 3 R 3 (C B) ,
''
Bq ( A C )rp 3 3 ( A C ) ,
R
'
Cr ( B A) pq 3 R 3 (C B) , ,
(4.1.1)
Для относительных направляющих косинусов имеем соотношения:
d
d
dt ' r ' ' q , dt ' r ' ' q ,
d
d '
' ' p ' ' r ' ,
' ' p r '
dt
dt
d ' '
d ' '
dt q ' p ' ' , dt q ' p ' '
(4.1.2)
Здесь ω — угловая скорость движения центра масс по орбите. Система
(4.1.1—4.1.2) дифференциальных уравнений замкнута: имеем 9 уравнений и 9
неизвестных. Отметим, что не все переменные независимы (по свойству
матрицы направляющих косинусов). Систему можно дополнить уравнениями
для β, β ', β ":
d
d '
d ' '
' r ' ' q,
' ' p r ,
q ' p
dt
dt
dt
(4.1.3)
Система (4.1.1 — 4.1.3) не интегрируется, по-видимому, в конечном виде.
Действительно, по теории последнего множителя Якоби для интегрирования
этой системы нужно знать четыре первых интеграла, не зависящих от времени
и отличных от тривиальных (соотношений между косинусами). Между тем
можно указать в лучшем случае только два интеграла этой системы, а именно:
если эллипсоид инерции является эллипсоидом вращения, то есть если А =В, то
имеется первый интеграл системы
r=r0 .
(4.1.4)
и, кроме того, в случае круговой орбиты при произволь- ных моментах
инерции существует интеграл типа Якоби
41
1
3
( Ap 2 Bq 2 Cr 2 ) 2 ( A 2 B '2 C ' '2 ) ( Ap Bq 'Cr ' ' ) h
2
2
(4.1.5)
(в существовании этого интеграла легко убедиться хотя бы простой
подстановкой в уравнения( 4.1.1 —4.1.3), учитывая, что на круговой орбите
R
3
2 const.
(4.1.6)
p p , q q ' , r r ' '.
(4.1.7)
Подставляя (4.1.6), (4.1.5), получим
2
2
2
1
3
1
( A p B q C r ) 2 ( A 2 B '2 C ' '2 ) 2 ( A 2 B '2 C ' '2 ) h
2
2
2
(4.1.8)
Интеграл (4.1.7) дает закон сохранения энергии в
следующем виде:
T V1 V2 h.
(4.1.9)
здесь Т — кинетическая энергия в относительном движении, V1—
потенциальная энергия ньютоновских сил, V2 — потенциальная энергия
центробежных сил. С помощью этого интеграла можно найти условия
устойчивости относительного равновесия.
Относительное равновесие, как видно из уравнений движения,
действительно существует; при этом матрица относительных направляющих
косинусов вырождается в единичную.
Компоненты угловой скорости спутника в относительном равновесии
будут иметь значения р = r = 0, q = ω. В относительном равновесии спутник все
время одной тороной «смотрит» на Землю.
Частное решение уравнений движения, дающее относительное равновесие
тела на круговой орбите, запишется так:
p q r 0,
' ' ' 1.
(4.1.10)
' '' '' '' 0
При таких значениях направляющих косинусов ось у' совпадает с
нормалью к плоскости орбиты, ось z' совпадает с радиусом-вектором, ось х'
совпадает с касательной к круговой орбите спутника.
Применим теорию Ляпунова к нахождению условий устойчивости этого
частного решения.
До Ляпунова устойчивость исследовалась с помощью линеаризованных
уравнений. Но линеаризованные уравнения могут дать неверный ответ на
вопрос об устойчивости. Исследование устойчивости на основе нелинейных
уравнений сводится к отысканию некоторой функции Ляпунова. Если
движение (2.1.8) принять за невозмущенное, то возмущенное движение можно
записать в виде
p, q, r ,1 1 , ' , ' ' , ,1 2 , , ' ,1 3
(4.1.11)
Δ1,Δ2,Δ3-и остальные выписанные величины характеризуют отклонения
возмущенного движения от невозмущенного; все они отличны от нуля.
42
По 1-му свойству матрицы косинусов имеем:
' '2 1 2 '2 , '2 1 2 ' '2
(4.1.12)
Подставим эти значения у" и β' в интеграл (4.1.7) и постоянные перенесем
направо:
2
2
2
1
3
1
V ( A p B q C r ) 2 (( A C ) 2 ( B C ) '2 ) 2 (( B A) 2 ( B C ) ' '2 ) h0
2
2
2
(4.1.13)
Здесь h0 — новая постоянная.
Левая часть этого равенства
невозмущенного движения (4.1.8). При
обращается
в
нуль
только
для
A BC
эта функция будет положительной. Таким образом, интеграл (4.1.11)
является положительно-определенным при условии (4.1.12).
Производная от V в силу уравнений движения по определению (так как это
есть интеграл уравнений движения) равна нулю. Следовательно, по теореме
Ляпунова условия (4.1.12) являются достаточными условиями устойчивости
относительного равновесия.
Возникающие в каждом случае вопросы построения системы стабилизации
вращением и ее основных элементов требуют своего индивидуального подхода
и решения, хотя они и сводятся в основном к следующим задачам:
1) регулирование скорости вращения;
2) демпфирование нутационных колебаний;
3) прогнозирование ухода оси вращения под действием возмущающих
моментов;
4) коррекция углового положения оси вращения.
Первой особенностью, непосредственно связанной с проблемой
сохранения первоначальной ориентации, является регулирование угловой
скорости КА. Поддержание постоянной по величине угловой скорости имеет
существенное значение, так как вследствие затухания собственного вращения
КА становится менее устойчивым по отношению к одним и тем же внешним
возмущающим моментам, что в конечном счете может привести к
возникновению беспорядочных колебаний. Существует несколько основных
причин, вызывающих затухание собственного вращения. Медленное затухание
скорости собственного вращения, вызываемое в основном влиянием
магнитного поля Земли, компенсировалось на спутниках различными
способами. Например, на некоторых спутниках для стабилизации угловой
скорости применялась активная система с газореактивными соплами,
установленными на внешней цилиндрической поверхности корпуса. В
лаборатории прикладной физики имени Джона Гопкинса разработана для ряда
спутников магнитная система стабилизации угловой скорости .
43
Рисунок 10 - Система стабилизации вращением: а - принципиальная схема;
б - функциональная блок-схема 1 - основное тело КА; 2 - пассивный демпфер;
3 - грузы для увеличения моментов инерции.
Наличие устойчивого положения относительного равновесия спутника на
орбите может быть использовано для создания системы пассивной
гравитационной стабилизации .
Чтобы спутник колебался около положения относительного равновесия (а
не переворачивался), кроме соблюдений условий (4.1.12) нужно еще, чтобы
кинетическая энергия движения спутника относительно центра масс была
достаточно мала.
Существенная положительность слагаемых в левой части позволяет
оценить амплитуды возмущенного движения. Очевидно, что для направляющих
косинусов имеют место оценки:
2h0
2h0
2
2
3 2 ( A C ) , ' 3 2 ( B C ) ,
2h0
2h
2
, ' '2 2 0
.
2
( B A)
(B C)
Постоянная h0 вычисляется подстановкой в левую часть интеграла энергии
начальных данных. По этим оценкам можно определить границы колебаний
спутника. Если h0 достаточно велико, то тело будет вращаться как угодно
быстро; чтобы такого вращения не было, надо, чтобы
44
2h0
3 2 ( A C ) 1,
2h0
3 2 ( B C ) 1,
2h0
1
2 ( B A)
2h0
1
2 ( B C )
Рисунок 11- Устойчивое положение эллипсоида инерции спутника на
орбите (ось z направлена по радиусу-вектору орбиты, у — по нормали к
плоскости орбиты, х — по касательной к орбите;
В > А > С.
Эти четыре условия «непереворачиваемости» тела можно свести к одному.
Второе и четвертое условия выполнены, если выполнено условие 2h0<ω2(B-C).
А так как В-А<В-С, то это условие выполнено, если выполнено третье из
условий : 2h0<ω2(B-A). Поэтому условия сводятся к совмещению 1-го и 3-го из
неравенств , что дает окончательное условие
3
1
h0 min{ 2 ( A C ), 2 ( B A)}
2
2
Это и есть условие ограниченности колебаний спутника, наложенное на
начальные данные. Заметим еще, что при h0 ≥ 0 будет иметь у ≥ 0, у' ≥0, β ≥ 0,
β" ≥ 0, как это видно из условий .
Отметим также, что направляющие косинусы у, у', β, β" полностью
определяют положение тела, а угловые скорости р, q, r полностью определяют
угловую скорость тела. Поэтому устойчивость движения относительно этих
переменных, доказанная с помощью , является устойчивостью движения тела
относительно всех переменных, определяющих это движение.
45
4.2 Влияние аэродинамических моментов на стабилизацию спутника
1. Условия устойчивости относительного равновесия.
В орбитальной системе xyz напишем проекции вектора скорости центра
масс спутника относительно вращающейся вместе с Землей (с угловой
скоростью w) атмосферы:
Vx V0 (1 e cos v) R cos i
V y R sin i cos u, Vz V0 e sin v,
P
V , R
0
P
1 e cos v
(4.2.1)
Компоненты момента (без диссипативных членов) по связным осям x'y'z'
будут иметь следующий вид, определяемый с помощью приведенной в
направляющих косинусов осей х'у'z' и xyz:
1
M x ' c( v )V {Vx ' 'V y ' 'Vz ' ' },
2
1
M y ' c( v )V {Vx 'V y 'Vz ' },
2
1
2
2
2
M z ' 0, V Vx V y Vz , cos v V Vx V y Vz .
(4.2.2)
При наличии сопротивления Р и е эволюционируют, то есть зависят от
времени. Но изменение параметров Р, е происходит очень медленно, и для
приближенного рассмотрения на одном или нескольких оборотах можно
принять P = const, е = const. Так как скорость вращения атмосферы Rw~0,5
км/сек на порядок меньше орбитальной скорости Vо~8 км/сек, то в первом
приближении можно принять ω~О. Примем еще е = 0 (круговая орбита). При
сделанных
предположениях
cos6y=a.
Тогда
суммарный
момент
аэродинамических и гравитационных сил имеет по осям x'y'z' компоненты
M ' 3 2 (C B) ' ' ' ,
x
1
2
2
M
3
(
A
C
)
'
'
V
c
( ) ' ' ,
'
x
2
M 3 2 ( B A) ' 1 V 2 c ( ) ' ,
x'
2
const , const ,V const.
(4.2.3)
В рассматриваемом случае будет существовать интеграл типа Якоби
2
2
2
1
3
1
( A p B q C r ) 2 (( A C ) 2 ( B C ) '2 ) 2 (( B A) 2 ( B C ) ' '2 ) U ( ) h0
2
2
2
1
U ( ) V 2 c( )d .
2
(4.2.4)
46
Здесь р, q, r — компоненты (по осям x,y,x) относительной угловой
скорости вращения спутника. Так как
U ( ) U (1)
1 U
2
1
( '2 ' '2 2 ) ...,
(4.2.5)
Где ζ=1-α то функция h0—U(l) обращается в нуль только в положении
относительного равновесия, кроме того, положительна при выполнении
условия гравитационной устойчивости и условия
U
1
0
(4.2.6)
Условие дает c1 0
Иначе говоря, для устойчивости относительного равновесия спутника
достаточно, чтобы спутник был гравитационно устойчив и, кроме того,
коэффициент аэродинамического момента в невозмущенном движении был
отрицателен. Можно считать, что c x0' Scx ,где х'о — координата центра
давления, S — характерная площадь, сх — коэффициент аэродинамического
сопротивления. Тогда условие эквивалентно условию х'о<0, то есть для
устойчивости достаточно, чтобы центр давления лежал позади центра масс
спутника по отношению к набегающему потоку.
Отметим, что рассматриваемое равновесие не является единственным
устойчивым положением равновесия. Приравнивая к нулю суммарный
аэродинамический и гравитационный момент, получим новые условия
равновесия:
1
2
' 0, ' 0,3 2 ( A C ) ' ' V 2 c( ) ' ' 0
(4.2.7)
Можно найти такое γ" = const ≠ 1 и соответствующиезначения γ, а, а",
которые удовлетворяют этому условию; тем самым найдем новые положения
равновесия. В этом случае одна ось спутника совпадает с нормалью
Рисунок 12- Взаимодействие аэродинамических и гравитационных
моментов:1-центр масс,2- центр давления,3-направление к центру Земли,
4- направление полета.
На рис.12 изображен спутник, для которого «обычное» устойчивое
положение относительного равновесия не имеет места. В первом из
изображенных на рис. 12 положений спутник гравитационно устойчив,
аэродинамически неустойчив. В третьем из изображенных положений,
наоборот, гравитационно неустойчив, аэродинамически устойчив (рис. 12, в).
47
Устойчивым будет некоторое «косое» положение равновесия (рис. 12,б),
промежуточное между положениями, изображенными на рис. 12, а и рис. 12, в.
Пусть Θ — угол между осью zr спутника и радиусом-вектором орбиты.
Тогда уравнение плоских колебаний запишется в виде:
..
n 2 sin cos bV sin 0
n2 3
(4.2.7)
AC
1 V2
, bV 2 c(cos ).
B
2 B
(независимая переменная τ = (ωt). Из этого уравнения видно, что имеются
..
следующие положения относительного равновесия Θ =
..
1°. = 0, π— старые положения равновесия, существующие и при
наличии только гравитационных моментов.
..
2°. cos
bV
новые положения относительного равновесия, которые в
n2
..
..
случае отсутствия аэродинамики (bv=0) дают cos =0, =0, то есть вторую
пару
гравитационных
положений
равновесия.
Второе
положение
относительного равновесия имеет место, когда
bV
V 1 .
n2
Заметим, что │bv│—модуль аэродина- мического момента, │n2│—модуль
гравитационного
момента,
то
есть
V
bV
n2
-
относительное
влияние
аэродинамического момента по сравнению с гравитационным моментом.
Оценим численное значение этого параметра для разных высот h над
поверхностью Земли.
Если с = const, то можно считать, что c x0' Scx .Тогда, учитывая, что V-wR,
получим из.
V k ( R3 h) 2 , k
x0' Sc x
6( A C )
(4.2.8)
Здесь Rз —радиус Земли;
h — высота орбиты над поверхностью Земли, ρ — плотность атмосферы.
Приведем таблицу изменения gv с высотой для спутника, имеющего параметры
с = 2;хо =0,5 м; S = 3м2
A C 30кГ * м * сек 2 .k 0,05 м 2 / cее 2
(см. таблицу 3). В таблице для каждого значения h приведены значения ρ в
технических (кГсек2/м4) и физических (г/см3) единицах; если приведенные
значения
ζv по модулю меньше единицы, то приводятся также значения угла
..
равновесия , соответствующего данномуζv.
Напомним, что без аэродинамики положение относительного равновесия
..
..
было бы =900,а без гравитационных моментов = 0.
48
4.3 Система гравитационной стабилизации искусственных спутников
Применение активных систем ориентации при значительном времени
существования спутника приводит к ряду трудностей, связанных с большим
расходом энергии или рабочего тела, весом и сложностью этих систем.
Возможно создание пассивных систем стабилизации на основе использования
свойств магнитных и гравитационных полей, эффектов светового давления,
сопротивления атмосферы и др. Важное положительное свойство пассивных
систем заключается в том, что эти системы могут функционировать
продолжительное время без расходования энергии или рабочего тела. Наиболее
существенный недостаток пассивных систем -сравнительно малая величина
управляющих моментов.Если спутник движется в центральном ньютоновском
поле сил по круговой орбите, то существуют четыре устойчивых положения
относительного равновесия, соответствующие совпадению наибольшей оси
эллипсоида инерции спутника с радиусом-вектором и наименьшей оси с
бинормалью к орбите. Положения устойчивого равновесия переходят одно в
другое при поворотах спутника на 180° вокруг радиуса-вектора и бинормали к
орбите. В абсолютной системе координат положению относительного
равновесия соответствует вращение спутника вокруг бинормали к орбите с
угловой скоростью, равной угловой скорости движения центра масс спутника
по орбите.
При отсутствии внутреннего рассеивания энергии величина амплитуд
малых колебаний спутника относительно равновесного положения не меняется
с течением времени. Точность стабилизации определяется
начальными
значениями углов и угловых скоростей спутника. Введение диссипативных сил
в систему превращает положения устойчивого относительного равновесия
спутника в асимптотически устойчивые. Тогда амплитуды собственных
колебаний, обусловленных
начальными значениями углов и угловых
скоростей, стремятся к нулю. Простейшая схема, позволяющая ввести
диссипативные силы и стабилизировать колебания искусственного спутника
относительно орбитальной системы координат на круговой орбите, такова.
Внутри гравитационно-устойчивого спутника находится центральная
сферическая полость, заполненная вязкой жидкостью. Колебательное движение
спутника приводит к перемещению вязкой жидкости относительно корпуса
спутника и
рассеиванию энергии. Сферу можно заменить полостью,
образованной двумя сферическими оболочками. Для заданной толщины слоя и
плотности вязкой жидкости, заключенной между сферическими оболочками,
существует оптимальная вязкость, обеспечивающая максимальную скорость
рассеивания энергии колебаний.
Основной недостаток схемы демпфирования колебаний спутника с
помощью вязкой жидкости заключается в том, что для сравнительно быстрого
рассеивания энергии требуется большое количество жидкости, так как
оказывается, что в оптимальном случае демпфирования момент инерции
жидкости должен быть сравним по величине с максимальным моментом
инерции спутника. Эффективность этой схемы несколько повышается, если
49
поместить жидкость в замкнутый тороидальный объем, расположенный вне
спутника. Д. Е. Охоцимский в 1956 г. предложил более эффективную схему
стабилизации и демпфирования.
Рисунок 13 . Система спутник-стабилизатор: 1 - спутник, 2- стабилизатор,
3 -центрирующие пружины, Р -сферический шарнир.
К телу спутника с помощью сферического шарнира присоединено второе
тело, которое называется стабилизатором. Стабилизатор выполнен в виде двух
одинаковых по длине жестко скрепленных друг с другом штанг с равными
грузами на концах. Системы координат O1 x1 y1 z1 и О2х2у2z2 суть главные
центральные трехгранники, связанные соответственно со спутником и
стабилизатором. Положение стабилизатора относительно тела спутника
фиксируется центрирующими пружинами. Параметры стабилизатора (длина
штанг, вес, угол раствора между штангами) выбираются таким образом, чтобы
при жестком закреплении стабилизатора относительно спутника система
спутник — стабилизатор была гравитационно-устойчивой. В положении
устойчивого равновесия системы спутник — стабилизатор штанги
расположены в плоскости орбиты, О1х1
О2х2, O1y1 O2y2 и параллельна
касательной к круговой
орбите, O1Z2 O1Z2. Нежесткое фиксирование
взаимного положения спутника и стабилизатора с помощью упругой связи
осуществлено с целью ввести в систему линейные демпфирующие члены,
используя относительную подвижность спутника и стабилизатора.
Практическая реализация линейного демпфирования в системе спутникстабилизатор возможна, например, с помощью магнитного демпфера, действие
которого основано на использовании токов Фуко, или жидкостного демпфера.
Подобные демпферы широко применяются в приборостроении. Предлагаемая
схема позволяет при любых инерционных характеристиках спутника
обеспечить его стабилизацию относительно орбитальной системы координат. В
среде без сопротивления форма спутника не имеет значения. Движение
системы определяется инерционными характеристиками спутника и
стабилизатора и координатами сферического шарнира относительно
трехгранников O1 x1 y1 z1 и О2х2у2z2 Моменты инерции стабилизатора
пропорциональны квадрату длины штанг, а максимальный размер штанг
50
определяется лишь требованиями жесткости конструкции. Поэтому
необходимое для удовлетворительного переходного процесса соотношение
между моментами инерции спутника и стабилизатора легко обеспечивается с
помощью малых масс на концах штанг за счет увеличения их длины. В
конструктивном отношении удобны, по-видимому, складные, или
телескопические, штанги либо штанги, выполненные из металлических лент,
свертывающихся под действием сил упругости в трубки. Упругую связь между
спутником и стабилизатором можно не вводить, если спутник без
стабилизатора гравитационно-устойчив и шарнир расположен на главной
центральной оси, соответствующей среднему по величине моменту инерции
спутника. Роль фиксирующих упругих связей в этом случае играют
гравитационные моменты. Схема системы спутник — стабилизатор на рис.
является наиболее простой и в то же время общей, так как она решает
поставленную задачу стабилизации при любых параметрах спутника.
Рассмотрение более сложных форм стабилизатора ничего нового к этой схеме
не добавляет. До сих пор речь шла о движении системы спутник -стабилизатор
на круговой орбите в среде без сопротивления. На эллиптической орбите к
убывающим по амплитуде собственным колебаниям добавляются
вынужденные эксцентриситетные колебания, вызываемые неравномерностью
вращения орбитальной системы координат. Эксцентриситетные колебания
происходят плоскости орбиты. Амплитуда эксцентриситетных колебаний
пропорциональна величине эксцентриситета орбиты и зависит от инерционных
характеристик спутника и стабилизатора. Частота эксцентриситетных
колебаний совпадает с частотой обращения центра масс системы спутник стабилизатор по орбите, и, следовательно, угол отклонения спутника
относительно орбитальной системы координат по времени меняется" очень
медленно. Эксцентриситетные колебания легко рассчитываются и могут быть
учтены при обработке результатов экспериментов, проводимых на спутнике.
При движении спутника на орбитах с высотой, меньшей 600 км,
необходимо учитывать влияние атмосферы, которое сводится в основном к
силам сопротивления, приложенным в центрах давления спутника и
стабилизатора и направленным против скорости центра масс системы спутник стабилизатор. Гравитационно-устойчивая схема системы спутник стабилизатор будет одновременно и аэродинамически устойчивой при
неизменном положении равновесия спутника и стабилизатора относительно
орбитальной системы координат, если выполнены следующие условия:
1) оси O1P и O2P (рис. ) являются осями геометрической симметрии
спутника и стабилизатора;
2) и спутник и стабилизатор не являются аэродинамически
неустойчивыми;
3) аэродинамическое торможение (отношение силы сопротивления к
массе) стабилизатора не больше аэродинамического торможения спутника, то
есть спутник как бы выполняет роль парашюта по отношению к стабилизатору.
Сформулированные условия являются достаточными. Эти условия,
учитывая гравитационную устойчивость системы спутник -стабилизатор и
51
наличие упругой связи, могут быть ослаблены. На круговой орбите учет
сопротивления атмосферы приводит к увеличению частот собственных
колебаний системы спутник -стабилизатор. Второй эффект воздействия
сопротивления атмосферы на колебания системы связан с увлечением
атмосферы вращающейся Землей и зависит от наклонения и высоты орбиты и
положения центров давления спутника и стабилизатора. Максимальная
амплитуда вынужденных колебаний, возникающих вследствие вращения
атмосферы, как показывают расчеты, не превышает нескольких градусов и
убывает с высотой. Частота колебаний совпадает с частотой обращения центра
масс системы по орбите. Вращение атмосферы не влияет на колебания в
плоскости орбиты и сказывается лишь на колебаниях системы, выводящих ее
из плоскости орбиты. На эллиптической орбите влияние атмосферы Земли на
движение системы спутник — стабилизатор более сложно, что связано с
изменением плотности атмосферы с высотой. При достаточно хорошем знании
аэродинамических сил, действующих на спутник и стабилизатор, колебания,
обусловленные воздействием атмосферы, могут быть рассчитаны и учтены.
Следует отметить, что в принципе можно исключить влияние сопротивления
атмосферы на колебания
системы спутник- стабилизатор. Для этого
достаточно выполнить спутник и стабилизатор аэродинамически нейтральными
и обеспечить равенство величин их аэродинамического торможения. При
выполнении этих условий сопротивление атмосферы сказывается лишь на
поступательном движении системы спутник -стабилизатор и не влияет на
колебательное движение системы. Требование застабилизировать спутник в
заданном устойчивом положении равновесия накладывает ограничения на
начальные условия спутника после его отделения от последней ступени ракетыносителя. Значения углов и угловых скоростей спутника должны быть такими,
чтобы в процессе успокоения переход из одного устойчивого положения
равновесия в другое был исключен. Если это условие не выполнено, то систему
гравитационной стабилизации следует ввести в рабочий диапазон с помощью
активной системы успокоения, уменьшающей начальные амплитуды до
необходимой величины. Уменьшение начальной угловой скорости системы
возможно также за счет увеличения ее моментов инерции в процессе
раскрывания штанг стабилизатора, находившихся до выведения спутника на
орбиту в сложенном состоянии.
Предлагаемая система гравитационной стабилизации может работать
длительное время и не требует при этом расходования энергии на
стабилизацию. Точность стабилизации спутника определяется лишь точностью
изготовления системы спутник -стабилизатор и в принципе может быть сколь
угодно высокой. Вес стабилизатора, обеспечивающего оптимальный
переходный процесс, при длине штанг, равной удвоенному максимальному
линейному размеру спутника, не превышает нескольких процентов от веса
спутника.
52
ЗАКЛЮЧЕНИЕ
Cистемы yправления спутников бaзируются на выбoре aдекватных
мaтематических мoделей, соответствующих его типу, применении современных
численных методов и построении алгоритмов, реализуемых в виде
программного обеспечения, позволяющего решать следующий ряд задач:
обработка поступающей информации, анализ законов движения центра масс
космического аппарата и его движения вокруг центра масс, реализация законов
управления, формирование управляющих сигналов и многие другие. От работы
системы управления зависит работа всех остальных подсистем космического
аппарата, а также качество выполняемых работ, обусловленных полезной
нагрузкой аппарата. Практически, перед каждым космическим аппаратом
ставятся специфические конкретные цели и задачи, система управления для
каждого аппарата, несмотря на обязательные элементы конструкции,
разрабатывается индивидуально под соответствующее назначение.
В данном диссертации представлены результаты выполненных работ:
Изложенные результаты, в диссертации , дает возможность, во-первых, что
данная теория вращения дает возможность в ряде случаев достаточно хорошо
определить фактические эффекты, полученные по данным наблюдений; вовторых, эти эффекты носят достаточно существенный характер и могут влиять
на температурный режим спутника, на его торможение (то есть на орбиту и
время существования) и другие динамические и физические характеристики.
Полученные результаты можно использовать при изучении эволюции
вращательного движения намагниченного спутника, в учебном процессе при
чтении курсов и проведении семинарских занятий по небесной механике,
методам теории возмущений, динамике космического полета, теории
гироскопов, и т.д.могут быть рекомендованы для чтения спецкурсов.
В заключение отметим, что определение параметров вращения и
ориентации возможно не только по данным радионаблюдений, по показаниям
магнитометров, датчиков солнечной ориентации, показаниям ионных ловушек
и манометров, по оптическим наблюдениям изменения блеска спутника и т. п.
В каждом конкретном случае обычно разрабатывается методика определения
ориентации применительно к данному случаю.
Поставленные в диссертации задачи полностью решены.
53
ОБОЗНАЧЕНИЯ И СОКРАЩЕНИЯ
БА
-
Бортовая аппаратура
БВСУ
-
Блок включения средств управления
БКУ
-
Бортовой комплекс управления
БЦК
-
Бортовой целевой комплекс
КА
-
Космический аппарат
СУДН
-
Система управления движением и навигации
СУОС
-
Система управления ориентацией и стабилизацией
СЭС
-
Система электроснабжения
СОТР
-
Система обеспечения теплового режима
НКУ
УС
Наземный комплекс управления
-
ЭМИО
CIRA
Устройство сопряжения
Электромагнитный исполнительный орган
-
Cooperative Institute for Research in the Atmosphere, модель
атмосферы Земли. Содержит распределение температуры,
давления и плотности воздуха в атмосфере Земли в
табличном виде
EGM
-
Earth Global Model, модель гравитационного поля Земли.
Содержит гравиметрические и геодезические данные
Земли в табличном виде
IGRF
-
International Geomagnetic Reference Field, модель
геомагнитного поля Земли. Позволяет вычислить
магнитное поле Земли в определенных координатах
ITRF
-
International Terrestrial Reference Frame, Международная
земная система отсчета. Является реализацией
геоцентрической системы координат ITRS, жёстко
связанной с Землёй ITRS с помощью декартовых
координат ряда опорных пунктов на Земле
54
СПИСОК ИСПОЛЬЗОВАННЫХ ИСТОЧНИКОВ
1 Белецкий В. В. Движение спутника вокруг центра масс в
гравитационном поле Земли. – М.: Наука, 1977. – 300 б.
2 Белецкий В. В. Движение искусственного спутника относительно
центра масс. – М.: Наука, 1965. – 381 б.
3 Бозорт Р. Ферромагнетизм. – М.: Изд. иностранной литературы, 1956.
4 Змуда А. Д. Геомагнитное поле и его аналитическое представление.
Геомагнетизм и аэрономия. 1973. – 13 т., N 6.
5 Меркин Д. Р. Введение в теорию устойчивости движения. – М.: Наука,
1971. – 140 б.
6 Лурье А. И. Аналитическая механика. – М.: Наука, 1961. – 822 б.
7 Калиткин Н. Н. Численные методы. – М.: Наука, 1976. – 512 б.
8 Жилисбаева К.С. Исследование методом Хори-Депри возмущенного
движения волчка Лагранжа. – М., 1989. – 27 с. – Деп. в ВИНИТИ 24.02.89, №
1259–В 89.
9 Жилисбаева К. С. Качественные исследования вращения вокруг
центра масс намагниченного спутника при малых возмущениях. –
Материалы международной конференции. Бишкек, Техник, 2002, 68–72 с.
10 В.В.Белецкий, А.А.Хентов. Вращательное движение намагниченного
спутника. М.: Наука, 1985. -288с.
11 В.В.Белецкий, А.А.Хентов. Резонансные вращения небесных тел.
Н.Новгород, НИРФИ, 1985 г. Грант № 950102803 РФФИ, -430с.
12 А.А.Хентов. Влияние магнитного и гравитационного полей Земли на
колебания спутника вокруг своего центра масс. – Космические исследования
АН СССР, 1967, т.5, №4. С.554-571.
13 А.А.Хентов. К теории систем дифференциальных уравнений с быстро
вращающейся фазой. В кн.: Проблемы аналитической механики,
устойчивости и управления движением. Новосибирск, Наука, 1991. С.276288.
55