2 - ReshimNa5.ru
advertisement

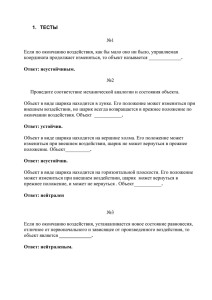
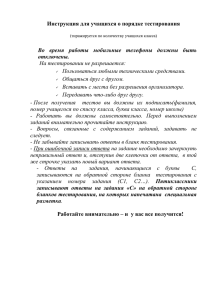
ЗАДАНИЕ на КР №2 по ТАУ (ВТУ). Тема: «Нелинейные, импульсные и цифровые системы». Вопросы задания. 1. Определить вид эквивалентных нелинейностей для типовых соединений нелинейных элементов (таб.1, столбцы А,Б). Тип нелинейности выбирается по двум последним цифрам шифра. Столбец А- по предпоследней цифре. Столбец В- по последней цифре шифра. (шифр 95) 2. Построение решетчатых функций: - определить вид решетчатой функции f(nT) для непрерывного сигнала Y(t). - определить скорость изменения решетчатой функции; - построить смещенную решетчатую функцию f(nT,ε); - сделать расчеты для определения максимального числа каналов связи и управления при временном заполнении интервала квантования Т приближенно равным 95%. Для построения данных параметров принять: Y(t) –1−4,934⋅10−3e−0,199t−0,995e48,34 t ; ε= Т·γ – параметр скваженности импульсной функции, выбирается на основании шифра индивидуального задания; значение Т, в секундах, принимается равным 0,1 от значения последней цифры шифра; а значение γ, продолжительность длительности импульса, принимается равным 0,01 от значения предпоследней цифры шифра. 3. Записать в восьмибитном двоичном коде шифр своего задания. Таблица 1. Вид нелинейности Тип соединения № А Б 1 2 Рис.1(а,б) Рис.1(б,г) 3 Рис.1(в,д) 4 Рис.1(г,е) 5 6 7 Рис.1(д,ж) Рис.1(е,з,к) Рис.1(ж,а) 8 9 10 Рис.1(з,г) Рис.1(е,и) Рис.1(а,г,е) последовательно С отрицательной обратной связью С положительной обратной связью С отрицательной обратной связью параллельно последовательно С положительной обратной связью последовательно последовательно параллельно Схема технологического процесса В Рис.8 Рис.9 Рис.10 Рис.11 Рис.12 Рис.13 Рис.14 Рис.15 Рис.16 Рис.17 4. Составить и провести анализ схемы релейного логического регулятора под заданный технологический процесс (таб.1, столбец В) Номер схемы технологического процесса выбирается по последней цифре шифра задания. Рисунок 1.Основные виды нелинейных характеристик Пример выполнения задания. Первый вопрос задания. Построение статических характеристик нелинейных систем При модернизациях схем автоматического управления технологическими процессами, с целью коррекции свойств системы, приходится вводить в структуру схемы новые нелинейные элементы. Расчет статических характеристик нелинейных систем для типовых соединений через построение дифференциальных уравнений является довольно трудоемкой операцией, но можно эту процедуру выполнить упрощенными методами, например, графически. При параллельном включении нелинейных звеньев с согласованием сигналов, Fx(XBX) и F2(X,,jX) результирующая статическая характеристика участка структурной схемы будет определяться выражением в общем виде (1) Рис.2. Схема параллельного соединения нелинейных элементов 2 Если узловой элемент является сумматором (рис. 2, а), то при двух или трех элементах, (I,II,III)., соединенных последовательно, амплитуда выходного нелинейного сигнала будет равна сумме амплитуд сигналов от элементов параллельной цепи при одних и тех же значениях времени. Математически, данная процедура описана выражением (1). Хвых =Х1+Х2 +Х3 =Fx (Хвх) + Ft(Xm) + F8(XBX) = F(XBI). (1) При этом в результате графического суммирования будет получена статическая характеристика участка нелинейной системы (рис. 2, б). Параллельное соединение нелинейных звеньев с характеристиками .F1(Xвх), F2(Xx) И F3(Х2) можно рассматривать как одно эквивалентное звено для которого значение оси абсцисс сохраняется, а ордината для соответствующих значений входного сигнала будет равна сумме ординат соответствующих входных сигналов параллельного соединения. При последовательном соединении элементов целесообразно построить их характеристики в отдельных квадрантах (установив между ними взаимосвязь) с учетом нелинейностей характеристик и четких взаимно однозначных соответствий между входными и выходными сигналами..(Рис.3). НЭ2 НЭ1 НЭ3 Рисунок 3. Последовательное соединение нелинейностей Выходная величина предыдущего элемента последовательной цепи, является входной для последующего элемента. Ордината предыдущего элемента является абсциссой последующего. Эквивалентная нелинейность проходит через точки построения 1,2, и т.д. II I 1 2 Рисунок 4. Нахождение эквивалентной нелинейности при последовательном соединении. 3 Для случая соединения с обратной связью в виде нелинейного звена, рисунок 5(а,б), Вид характеристики звена I, охваченного обратной связью, помещаем в первый квадрант, а вид нелинейной характеристики звена обратной связи помещаем во второй квадрант., так как выходной сигнал звена I, является входным для звена обратной связи. В зависимости от знака обратной связи, отрицательная или положительная, построение несколько отличаются. При отрицательной обратной связи зависимости I и I I строятся в первом и втором квадрантах, в случае положительной обратной связи, зависимости I и I I строятся в первом квадранте. В зависимости от знака обратной связи уравнения сигналов можно записать в следующем виде: для отрицательной обратной связи Х Х вх Х ос ; для положительной обратной связи Х Х вх Х ос . Из данных зависимостей вытекает следующее соотношение, для отрицательной обратной связи входной сигнал эквивалентной нелинейности равен Х вх Х Х ос , а для положительной обратной связи Х вх Х Х ос . +- Нэ1 НЭ1 НЭ2 Рисунок 5. Соединение с обратной связью I II III с а в д Рисунок 6.Нахождение эквивалентной нелинейности при соединении с отрицательной обратной связи. Для кривой III, вид нелинейной выходной зависимости при отрицательной обратной связи для элементов I и II, строится следующим образом. Строим характеристики I и II в первом и втором квадрантах. Проводим серию секущих параллельных оси ОХ и от соответствующих точек пересечения с кривой I откладываем вправо отрезок сд, равный по величине отрезку ав. Таким образом, получаем серию точек принадлежащих эквивалентной нелинейности. Последовательно соединяем данные 4 точки и получаем вид зависимости эквивалентной нелинейности для соединения нелинейных элементов при наличии отрицательной обратной связи. При наличии соединения нелинейных элементов с положительной обратной связью (Рис.7),. Характеристики нелинейных элементов I и II строим в первом квадранте. Проводим серию горизонтальных прямых и горизонтальный отрезок между заданными нелинейностями сд откладываем от оси ординат с учетом знака. Если отрезок сд совпадает с направлением оси ОХ, то откладываем его вправо от оси ординат, если отрезок сд не совпадает с направлением оси ОХ, то откладываем данный отрезок слева от оси ординат на соответствующей горизонтали секущей. Получаем серию точек пересечения, соединяем их в определенной последовательности и получаем вид зависимости эквивалентной нелинейности для данного вида соединения. Второй вопрос задания. Определить вид решетчатой функции. Вид решетчатой функции для заданного непрерывного сигнала получаем в виде амплитудных отрезков на временных интервалах квантования. Примерная методика построения приведена на рис. 7. Найти скорость изменения решетчатой функции и У(t) 7Т 0 Т 2Т 3Т 4Т 5Т 6Т 8Т nТ Рисунок 7. Вид решетчатой функции для заданного непрерывного сигнала. изобразить модифицированную решетчатую функцию с учетом сдвига и определить количество каналов связи. Необходимые параметры построения заданы в варианте индивидуального задания. Для расчета количества каналов связи для варианта задания можно использовать зависимость х*γ=0,95*Т, где х- количество каналов связи , для данного варианта задания. Третий вопрос задания. Записать номер шифра задания в двоичном коде. (Пример решения имеется в лекционном курсе). Четвертый вопрос задания. Составить и провести анализ схемы релейного логического регулятора под заданный технологический процесс. Ознакомится с принципом работы технологической схемы задания, определится с входными и выходными сигналами, при необходимости установить в схему датчики, работающие по принципу ДА или НЕ и составить таблицу истинности для выбранных входных и 5 выходных переменных. Провести анализ автоматической работы технологической схемы и расставить значения 0 и 1 для выходного сигнала на основании анализа сочетания комбинаций входных сигналов. Полученную функцию управления упростить на основании теорем булевой алгебры и привести реализацию рабочей схемы логического регулятора на основе основных логических элементов ИЛИ, И, НЕ. Рис8. Схема автоматизации работы отражательной печи. Автоматизация сжигания топлива достигается следующим. В своде печи установлен радиационный пирометр /, связанный с электронным потенциометром и изодромным регулятором, последний воздействует через исполнительный механизм на регулирующую заслонку 2 на подаче топлива и сочлененную с ней заслонку 3 на воздухопроводе. При снижении температуры исполнительный механизм увеличивает подачу топлива и воздуха, при повышении температуры снижает поступление их в форсунку (горелку). Рис.9 Типовая схема автоматизации испарителей. 6 Регулирование уровня по подаче греющего пар как показателя эффективности процесса нагревания в испарителе. Регулирование давления по отбору паровой фазы из испарителя - для обеспечения материального баланса по паровой фазе и стабилизации. Контроль: расходы, температуры, давление, уровень Сигнализация: существенные отклонения Рж и Рп от заданных; резкое падение расхода технологического потока Gж (порыв в трубопроводе), при этом формируется сигнал «В схему защиты». Рис.10 Типовая схема компрессорной станции. Контроль: максимальное давление, минимальное давление, максимальная температура Рис.11 Типовая схема электрического водонагревателя. Напряжение подается на УЛТ, основой которого является контактный термометр и реле. Если температура воды в корпусе нагревателя ниже заданной, включается реле и подастся напряжение на терморегулятор, который включает и нагревательные элементы. Нагрев длится до выхода температуры воды на заданный уровень и размыкания контактов. 7 В случае нарушения описанного алгоритма и аварийного подъема температуры до 95 С устройство обесточивает реле и нагреватель отключается. Рис.12 Автоматизация вертикальных автоклавов. Контроль: ДТ- датчик температуры; ДД1-ДД2 – датчики давления. Рис.13 Типовая схема автоматического шлагбаума. 8 Рис.14 Типовая схема автоматизации процесса выпаривания. Регулирование температурной депрессии по подаче исходного раствора как параметра, косвенно характеризующего показатель эффективности процесса выпаривания . Регулирование давления в сепараторе по отбору паров растворителя для обеспечения материального баланса по паровой фазе. Регулирование уровня в сепараторе по отбору концентрированного раствора для обеспечения материального баланса по жидкой фазе. Стабилизация расхода теплоносителя для обеспечения теплового баланса установка Контроль; расход, температура, давление, уровень концентрированного раствора в аппарате. Примечание: Приведенные схемы технологических процессов взяты из литературных источников и являются примерными. По усмотрению студентов могут быть модернизированы с целью обеспечения улучшенных показателей надежности и качества работы. При защите контрольной работы, проведенная модернизация должна быть обоснована и защищена. Литература: 1. А. В. Никитин, В. Ф., Шишлаков «ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ НЕЛИНЕЙНЫХ СИСТЕМ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ »: (Под редакцией В. Ф. Шишлакова). Санкт Петербург, 2003..383 с. 2. Туманов М.П. «Теория импульсных, дискретных и нелинейных САУ»: Учебное пособие. – МГИЭМ. М., 2005, 63 с. 3.Л.И.Токмакова «Системы управления электроприводов». Владивосток. Изд. Дальневосточный технический университет. 2002. 42 с. ВТУ Кафедра Автоматизации и управления Табаков В.Е. 2012г. 9