доктор физико-математических наук, профессор
advertisement

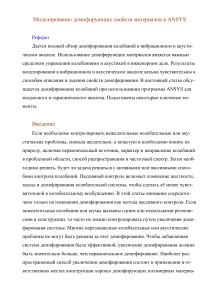
На правах рукописи НАУМОВ Сергей Геннадиевич РАЗРАБОТКА ТЕОРИИ И СПОСОБОВ ДЕМПФИРОВАНИЯ ШУЛЕРОВСКИХ КОЛЕБАНИЙ И ПОВЫШЕНИЯ ТОЧНОСТИ БЕСПЛАТФОРМЕННЫХ ИНЕРЦИАЛЬНЫХ НАВИГАЦИОННЫХ СИСТЕМ Специальность 05.11.03 – Приборы навигации Автореферат диссертации на соискание ученой степени кандидата технических наук Саратов 2009 Работа выполнена в ГОУ ВПО «Саратовский государственный технический университет» Научный руководитель: Заслуженный деятель науки и техники РФ, доктор технических наук, профессор Плотников Петр Колестратович Официальные оппоненты: доктор физико-математических наук, профессор Челноков Юрий Николаевич кандидат технических наук Мельников Андрей Вячеславович Ведущая организация: Институт проблем точной механики и управления Российской академии наук, г. Саратов Защита состоится «29» декабря 2009 г. в 15 часов на заседании диссертационного совета Д 212.242.04 при ГОУ ВПО «Саратовский государственный технический университет» по адресу: 410054, Саратов, ул. Политехническая, 77, Саратовский государственный технический университет, корпус 1, ауд. 319. С диссертацией можно ознакомиться в научно-технической библиотеке ГОУ ВПО «Саратовский государственный технический университет». Автореферат разослан «27» ноября 2009 г. Ученый секретарь диссертационного совета В. В. Алешкин 2 ОБЩАЯ ХАРАКТЕРИСТИКА РАБОТЫ Актуальность темы В настоящее время бесплатформенные инерциальные навигационные системы (БИНС) находят широкое применение на различных подвижных объектах (ПО) для определения параметров ориентации и навигации. БИНС отличаются автономностью работы, высокой надежностью, удобством эксплуатации, малыми габаритами и массой. Однако автономной работе БИНС свойственно наличие медленно меняющихся и периодических ошибок, вызванных тем, что в рабочем режиме после выставки вертикаль моделируется при настройке на период Шулера дифференциальными уравнениями без демпфирования. Скорости вычисляются интегрированием ускорений, и постоянная ошибка ускорений преобразуется в непрерывно нарастающие ошибки скоростей. Такая же ситуация складывается с ошибками при определении углов ориентации. Кроме того, имеется неустойчивость вертикального канала. Неточность задания начальных условий на момент включения БИНС, а также некомпенсированные погрешности гироскопов и акселерометров вызывают незатухающие колебания с периодом Шулера (при котором обеспечивается инвариантность систем к действию горизонтальных линейных ускорений). Из-за формируемой по сигналам акселерометров интегральной коррекции с настройкой на частоту Шулера изменение ошибок происходит с периодом 84,4 мин. Эти колебания создают погрешности в показаниях ориентации, скорости и координат. Таким образом, БИНС представляют собой колебательные системы и при длительной работе нуждаются в демпфирующем устройстве. В основе математического описания процесса функционирования БИНС положены уравнения кинематики твердого тела. В ряде задач используются кватернионные кинематические уравнения, значительный вклад в разработку которых внесли: В.Н. Бранец, И.П. Шмыглевский, Ю.Н. Челноков, П.К. Плотников, В.Б.Никишин, D.H. Titterton, Eun-Hwan Shin и другие ученые. Подходы к демпфированию колебаний Шулера в инерциальных навигационных системах (ИНС) изложены в трудах Г.О. Фридлендера, Э.И. Слива, П.В. Бромберга, Д.М. Климова, Е.А. Девянина, В.Д. Андреева, А.А. Одинцова, Г.И. Емельянцева, О.Н. Анучина, J.B. Scarborough, C.F. O'Donnell, C. Broxmeyer, C.J. Savant, D.H. Titterton, J.L. Weston, J.A. Farrell и других ученых. При этом классическое демпфирование, вводимое в автономную инерциальную систему, кроме затухания колебаний, вносит и погрешности в параметры, определяемые БИНС. В связи с этим для автономных БИНС с настройкой на частоту Шулера актуальной является задача построения эффективных способов демпфирования собственных колебаний в таких системах. 3 Цель работы Повышение точности определения параметров ориентации и навигации в БИНС путем разработки способов демпфирования колебаний Шулера в БИНС на основе кватернионных уравнений и введения азимутальной коррекции от GPS. Задачи работы: - усовершенствовать кватернионные корректируемые дифференциальные уравнения ориентации и навигации ПО с приведенными к горизонтному базису членами с настройкой на частоту Шулера путем применения коррекции с фильтрами и нелинейными элементами; - получить уравнения ошибок данных кватернионных уравнений; - разработать способы демпфирования шулеровских колебаний в БИНС при работе в реальном времени и при постобработке записей как для автономной БИНС, так и с применением ГЛОНАСС/GPS; - разработать способ введения азимутальной коррекции БИНС по сигналам GPS; - подтвердить теоретически и экспериментально достоверность полученных результатов. Методы исследования При решении поставленных задач использованы методы и математический аппарат теории инерциальной навигации, теории автоматического управления, теории сферического движения твердого тела в кватернионной форме, теории линейных дифференциальных уравнений, исследований натурных данных. Научная новизна: 1. Усовершенствованы уравнения автономной работы БИНС, представленные кватернионными корректируемыми уравнениями ориентации и навигации в осях горизонтного базиса с настройкой на частоту Шулера, путем введения в члены позиционной коррекции ограничения ускорений после предварительной фильтрации при превышении заданного уровня. 2. Разработана схема автономного демпфирования каналов тангажа и крена БИНС с введением сглаживающих фильтров и нелинейных элементов в линию позиционной коррекции, приведенной в географический сопровождающий базис, обеспечивающая более высокую точность построения горизонта и выработки скорости во время и после маневрирования объекта по сравнению с классическими схемами автономного демпфирования. 3. Выведены уравнения ошибок полученных уравнений работы БИНС с применением схемы автономного демпфирования, позволившие на их основе построить алгоритмы фильтра Калмана (ФК). 4 4. Разработана структура схемы демпфирования колебаний БИНС путем использования информации от GPS-приемников на основе ФК с возможностью применения схемы автономного демпфирования. 5. Усовершенствован способ определения поправок по азимуту и азимутальному дрейфу при постобработке сигналов БИНС с настройкой на частоту Шулера в кватернионных уравнениях на основе координат трех реперных точек, полученных с помощью GPS-приемников. Практическая значимость и реализация результатов Построенные кватернионные корректируемые уравнения ориентации и навигации позволяют произвести настройку собственных колебаний параметров БИНС на частоту Шулера, устраняющую баллистические погрешности от действия кажущихся ускорений за счет позиционной радиальной коррекции в схеме автономного демпфирования. Разработанные уравнения и способы демпфирования колебаний Шулера и азимутальная коррекция повышают точность выработки параметров ориентации и навигации, увеличивают интервалы автономной работы БИНС (или интегрированной БИНС-GPS в моменты потери сигнала GPS). Проведена апробация способов демпфирования шулеровских колебаний и введения азимутальной коррекции при постобработке задачи позиционирования участков трасс газопровода по показаниям внутритрубных инспектирующих снарядов (ВИС) СИТ-500, СИТ-1400 и GPS (координаты реперных точек), предоставленных ЗАО «Газприборавтоматикасервис». Способ азимутальной коррекции с использованием GPS внедрен в производство на ЗАО «Газприборавтоматикасервис». Основные результаты и положения, выносимые на защиту: 1. Уточненный алгоритм работы БИНС, представленный кватернионными дифференциальными уравнениями ориентации и навигации, обеспечивающий определение местоположения ПО при любых углах его поворотов, с введенным ограничением ускорений после предварительной фильтрации при превышении заданного уровня. 2. Структура БИНС с демпфирующей схемой в каналах тангажа и крена с применением сглаживающих фильтров и нелинейных элементов в контуре коррекции по сигналам ускорений, приведенных в географический сопровождающий базис. 3. Математическая модель ошибок БИНС в кватернионных параметрах с настройкой на частоту Шулера, отличающаяся от известных введением демпфирующих членов. 4. Способ демпфирования колебаний путем интегрирования БИНС с GPS при использовании ФК и схемы автономного демпфирования. 5. Метод повышения точности БИНС путем компенсации азимутального дрейфа гироскопов и поправок по углу азимута при постобработке данных с использованием информации от GPS. 5 6. Результаты применения построенных уравнений работы БИНС с демпфирующими схемами при математическом моделировании движения морского объекта, самолета и обработке натурных записей сигналов БИНС при работе ВИС на действующем газопроводе для топографической привязки к электронной карте местности. Достоверность и обоснованность полученных результатов Подтверждается корректностью поставленной задачи, адекватностью использованных математических моделей и обоснованностью принятых допущений, сопоставлением аналитических результатов, данных, полученных при математическом моделировании и обработке натурных записей. Апробация работы Основные положения и результаты по работе докладывались на VIII конференции молодых ученых «Навигация и управление движением» (Санкт-Петербург, 2006), на XIV и XVI Санкт-Петербургских международных конференциях по интегрированным навигационным системам (2007, 2009), международных научных конференциях «Математические методы в технике и технологиях» (Саратов, 2008, Тамбов, 2008, Псков, 2009), «Ломоносов» (Москва, 2009), на научных семинарах кафедры «Приборостроение» СГТУ (2006-2009). Публикации По результатам научных исследований, проведенных в рамках данной диссертационной работы, опубликовано 9 научных работ, в том числе две в изданиях, рекомендованных ВАК Министерства образования и науки РФ, и патент. Структура и объем диссертационной работы Диссертационная работа состоит из введения, пяти глав, заключения и списка использованной литературы из 89 наименований, содержит 134 страницы, включает 50 рисунков, 8 таблиц. ОСНОВНОЕ СОДЕРЖАНИЕ РАБОТЫ Во введении обоснована актуальность проблемы, решаемой в диссертационной работе. В первой главе приводится краткий обзор БИНС, обзор трудов по структуре и алгоритмам демпфирования колебаний Шулера в ИНС. Установлено, что наибольшее распространение получили способы демпфирования БИНС, построенные на интеграции с другими датчиками неинерциальной природы. Перспективными являются способы устранения или уменьшения колебаний с периодом Шулера в БИНС путем применения информации от GPS-приемников. Однако разработка способов демпфирования автономных БИНС без привлечения других источников информации также является актуальной, т.к. классические способы приводят к потере инвариантности БИНС к действию линейных ускорений при движении объекта. Показана необходимость использования 6 кватернионных уравнений функционирования БИНС, обладающих важным свойством невырождаемости решения, которое отсутствует у классических кинематических уравнений Эйлера-Крылова. По результатам анализа материалов первой главы сформирована цель и основные задачи диссертационного исследования. Во второй главе описан объект исследования – БИНС, уточнены теоретические предпосылки ее работы и построены уравнения ее функционирования. Функциональная схема БИНС приведена на рис. 1. Она состоит из блока инерциальных датчиков, включающих три гироскопа и три акселерометра, а также бортового компьютера, решающего задачи ориентации и навигации. ˆ , ˆ , ˆ – оценки ориентационных Рис. 1. Функциональная схема БИНС: ˆ 0 ..ˆ 3 ; ˆ , ˆ – оценки навигационных параметров параметров; ˆ 0 ..ˆ 3 , Введем следующие правые ортогональные системы координат: – инерциальная; – горизонтная сопровождающая; – географическая система координат, ось O которой направлена по вертикали места, а оси 2 O и O лежат в плоскости горизонта; X – система координат, связанная 1 3 с ПО, причем OX 1 – продольная, OX 2 – нормальная, OX 3 – поперечная, направленная на правый борт ПО. Полагаем, что т. О совпадает с центром масс ПО; , , – углы рыскания, тангажа и крена; , – углы географических долготы и широты места; R – радиус Земли, принятой за сферу; U – угловая скорость вращения Земли. Взаимная ориентация введенных систем координат (базисов трехгранников) задается кватернионными параметрами в соответствии со следующей схемой: ˆ , ˆ , ˆ ˆ , ˆ ˆ 0 ..ˆ 3 ˆ 0 ..ˆ 3 X , (1) где ˆ 0 ..ˆ 3 – параметры кватерниона ориентации; ˆ 0 ..ˆ 3 – параметры кватерниона навигации, по которому определяется оценка широты и ˆ , ˆ , ˆ – оценка углов рыскания, тангажа и крена. долготы – ˆ , ˆ ; На основе приведенной схемы поворотов с помощью ввода принципиально новых членов коррекции (5)-(8) (для использования схемы 7 автономного демпфирования) в уравнения движения в кватернионных параметрах получаются следующие уравнения, описывающие движение БИНС: k k k ˆ 1 ˆ 2 ( ˆ 2 ˆ 3 ( ˆ 3 ˆ 2 ˆ 0 ; 2ˆ 0 ˆ1( 1) 2) 3) 1 ˆ k ) ˆ ( ˆ k ) ˆ ( ˆ k ) 1 ˆ 2 ˆ ; (2) 2ˆ ˆ ( 1 2ˆ 2 2ˆ 3 Wˆ 1 3 2 2 3 1 1 2 3 k k k ˆ 1 ˆ ˆ ˆ ˆ ˆ2 ˆ ˆ 3 ( 1 ) 0 (2 2 ) 1 (3 3 ) 1 2 ; k k k ˆ 1 ˆ ˆ ˆ ˆ ˆ2 ˆ ˆ 2 ( 1 ) 1 (2 2 ) 0 (3 3 ) 1 3 ; 0 ˆ Aˆ Wˆ T ˆ 1 W 2 W3 T ˆ ˆ T ˆ ˆ ˆ T Aˆ T ˆ X1 ˆ X2 ˆ X 3 T ; X 1 WX 2 WX 3 ; 1 2 3 ˆ 2 ˆ 2 ˆ 2 ˆ 2 1 2 3 0 Â 2ˆ 1ˆ 2 ˆ 0ˆ 3 2ˆ ˆ ˆ ˆ 0 2 1 3 2ˆ 0ˆ 3 ˆ 1ˆ 2 ˆ 02 ˆ 22 ˆ 12 ˆ 32 2ˆ 2ˆ 3 ˆ 0ˆ 1 2ˆ 1ˆ 3 ˆ 0ˆ 2 2ˆ 0ˆ 1 ˆ 2ˆ 3 ; ˆ 02 ˆ 32 ˆ 12 ˆ 22 t t k I ˆ* 4Н 3Н ; k I ˆ* ˆ ˆ k1 W3 d k [k4 (W ) k3 (W )] k3 W1 d k [k2 (Wˆ2 Н ) k1(Wˆ1Н )] ; 3 3 1 1 1 3 t0 t0 WˆiН 0,5Wˆ*i (1 sign(i Wˆ*i )) 0,5i sign(Wˆ*i )(1 sign(i Wˆ*i )) ; i 1,2 ; 1 1 1 1 1 WˆiН 0,5Wˆ*i (1 sign(i Wˆ*i )) 0,5i sign(Wˆ*i )(1 sign(i Wˆ*i )) ; i 3,4 ; 3 3 3 3 (3) (4) (5) (6) (7) 3 T3Wˆ*3 Wˆ*3 Wˆ* , T4Wˆ*4 Wˆ*4 Wˆ* ; T1Wˆ*1 Wˆ*1 Wˆ* , T2Wˆ*2 Wˆ*2 Wˆ* ; 3 3 1 1 3 3 3 3 1 1 1 1 k k k ˆ ( f ) ; k2 k1tg 2 2 ; 2 , (8) где ̂ Xi , Ŵ Xi – оценки компонентов угловой скорости и кажущегося ускорения в базисе X, полученные с гироскопов и акселерометров; * – оценки компонентов угловой скорости, кажущегося и ˆ ̂i , Wˆi , W i линейного ускорений в базисе η; ρ=1 – коэффициент нормировки k k кватерниона ̂ ; i , i – угловые скорости коррекции в базисах η и , соответственно; t – текущее время; k1I , k3I – коэффициенты передачи членов интегральной коррекции; k , k – коэффициенты передачи членов позиционной коррекции; – кватернион ориентации базиса относительно базиса ; k – кватернион угловой скорости коррекции в базисе ; ( f ) – азимутальный дрейф (азимутальная коррекция), получаемый трехточечным способом (показано ниже). Навигационные параметры определяются следующим образом: n T T ˆ ˆ , i 1,3; ˆ Aˆ T xˆ ; ˆ ˆ / R ; ˆ ˆ /( R cos ˆ ) , (9) i k 1 ik k k k 8 1 3 где ˆ xk (xˆ1k , xˆ 2k , xˆ3k ) – вектор оценки приращения пройденного пути по показаниям дискретного датчика на k-м шаге (для одометра xˆ (xˆ , 0, 0) ); ˆ – приращения декартовых координат относительно k 1k ik трехгранника на k-м шаге; Âk – оценка матрицы ориентации (матрицы направляющих косинусов, составленной из параметров кватерниона) корпуса ПО (трехгранника X) относительно трехгранника на k-м шаге. В (2)-(9) усовершенствованными автором являются уравнения (5)(8), описывающие демпфирование колебаний Шулера. Описанные уравнения (2)-(8) позволяют определять угловое положение объекта по сигналам датчиков угловой скорости и кажущегося ускорения в любой момент времени. Уравнения (9) представляют собой алгоритмы позиционирования для определения траектории движения только по показаниям датчика приращения объектовых координат. Рассмотрим вопросы введения азимутальной коррекции от показаний GPS (рис. 2). Если известны суммарный азимутальный дрейф гироскопов в плоскости горизонта ( f ) (далее просто ) и поправка по азимуту 0 , то их можно ввести в алгоритмы ориентации. Для этого дрейф Рис. 2. Траектория движения объекта к пояснению трехточечного алгоритма учитывается в коррекции k2 и вместо последней в уравнения ориентации (2) вводится коррекция k2* k2 . ˆ* ˆ 0 Поправка по азимуту вводится после пересчета кватернионов в углы Эйлера-Крылова, а затем пересчитывается обратно в кватернионы при сопоставлении кватернионной матрицы (4) с матрицей направляющих косинусов для ˆ * , ˆ , ˆ . перехода в объектовую систему координат по углам Далее в (2) уже используются кватернионы ˆ i , i 0,3 с введенной поправкой по азимуту. Методика и алгоритмы определения параметров , 0 с использованием информации GPS представлены ниже, в гл.3. Для повышения точности БИНС разработана схема автономного демпфирования шулеровских колебаний БИНС с использованием схемы для платформенных ИНС (Об одной схеме автономного демпфирования инерциальных навигационных систем / А.А. Одинцов [и др.] // Гироскопия 9 и навигация. 2008. № 1 (60). С. 33–42.). На рис. 3 представлена структурная схема БИНС с введенным демпфированием каналов тангажа и крена. x Блок гироскопов k 2 k 3 k k 1 -kγ k3 1/R k2 k1 1 Wˆ*11 1/ (T1s+1) Wˆ4 H 3 1 1/ (T2s+1) 1/ (T3s+1) 1/s Δ4 Задача выработки ˆ , Vˆ , параметров ˆ ˆ поступательного ˆ , , h движения ̂ Wˆ*34 Wˆ*3 Wˆ*2 U cos ̂ 1 Δ3 Δ2 Δ1 k 1/R k4 Wˆ31H Wˆ2 H Wˆ11H ˆ , ˆ , ˆ ˆ, Компенсация вращения Земли и линейной скорости tan ̂ kθ Задача выработки параметров ориентации 1/ (T4s+1) d̂ -1/s dt Wˆ * ̂ Wˆ * 1 3 ̂ , Vˆ Вычисление поправок на переносные ускорения, ускорения Кориолиса, линейного ускорения Wx Блок акселерометров Рис. 3. Структурная схема БИНС с введенным демпфированием Жирными линиями на схеме выделены контуры демпфирования по тангажу и крену, введенные в линию оценок линейных ускорений объекта в свободной горизонтной системе координат ( Wˆ* , Wˆ* ). Каждый контур 1 3 включает по два канала, состоящих из сглаживающего фильтра (Ts 1) 1 (Т1 – Т4 – постоянные времени), нелинейного элемента (Δ1 – Δ4 – пороги ограничения) и усилителя (k1 – k4 – коэффициенты усиления). Для контуров тангажа и крена введены также усилители – kθ, kγ, соответственно. Сигналы контуров демпфирования подаются совместно с интегральной коррекцией по тангажу и крену в алгоритм выработки ориентации ПО для компенсации вращения Земли и линейной скорости ПО. Введены также условия работы данной схемы: T2 / T1 2, k 2 / k1 2, k1 1, 1 / 2 2 и T4 / T3 2, k 4 / k3 2, k3 1, 3 / 4 2 . (10) В отличие от реализации схемы демпфирования на платформенной ИНС, в БИНС дополнительный контур вводится не в линию выходного сигнала акселерометра, а в линию ускорения, приведенного в географический сопровождающий базис. В корректирующие члены в 10 дополнение к интегральной коррекции параллельно вводится сглаженный фильтром и ограниченный нелинейным элементом сигнал как по каналу тангажа, так и по каналу крена. При отсутствии маневра будет иметь место коррекция в виде суммы позиционных и интегральных членов. Разработана также структура демпфирования колебаний интегрированной БИНС путем использования описанной выше схемы, дополненной информацией от приемников систем спутниковой навигации. В этом случае совместная обработка сигналов измерительных систем производится с помощью ФК. Вектор состояния имеет вид: x ; ; ; V1; V2 ; V3 ; ; x 1; x 2 ; x 3 ; Wx 1; Wx 2 ; Wx 3 T , (11) где α, β, χ – ошибки определения моделируемой в бортовом компьютере горизонтной системы координат, Vi – ошибки определения БИНС скоростей объекта; – погрешность определения широты; xi – погрешности гироскопов; Wxi – погрешности акселерометров; i 1,3 . Применение ФК позволяет демпфировать колебания Шулера в интегрированной БИНС-GPS на морском ПО, самолете. Когда информация от GPS отсутствует, используется схема автономного демпфирования. Усовершенствован способ введения азимутальной коррекции БИНС по показаниям GPS при постобработке записей. Известно, что БИНС накапливает некомпенсированную погрешность в азимуте. Для ее компенсации проводится доворот подвижной системы координат на определенный угол в азимуте перед началом движения из известной точки с координатами по GPS по данному участку до следующей такой точки и ввод сигнала компенсации азимутальной скорости дрейфа на данном участке. Основной проблемой для такого вида коррекции является разделение двух сигналов: приращения азимута и азимутального дрейфа гироскопов. Разработанный способ позволяет определять усредненные поправки по азимуту 0 и азимутальный дрейф гироскопов одновременно на двух участках между тремя маркерами с известными координатами – «трехточечный алгоритм». Для этого требуется проводить расчет движения ПО через три маркера (рис. 2, идея трехточечного алгоритма и способ его реализации были предложены В. Б. Никишиным, математическая и программная реализация разработаны и внедрены соискателем). В третьей главе проведены аналитические исследования работы БИНС с предложенными устройствами демпфирования. Получены передаточные функции (исключая ограничители) схемы в каналах тангажа и крена (рис. 3). Для канала тангажа: k k ˆ* 1 (12) ). 3 W1 ( sR 2T12s 2 3T1s 1 11 Первый член суммы описывает интегральную коррекцию, а второй – схему демпфирования. В установившемся режиме второй член даст классическую позиционную коррекцию с выходом на заданный уровень по апериодическому закону (при условии, что уровень ускорения не доходил до ограничителей). Показано, что ограничение Δ2 будет достигнуто первым, величина W в момент времени t2: (13) W 2 / Wˆ * . 2 1 Ослабление влияния ускорений на сигнал коррекции пропорционально квадрату Δ2. Максимальное значение W достигает в момент начала действия ограничения Δ2. Таким образом, схема демпфирования в отсутствие ускорений будет представлять собой классическую позиционную радиальную коррекцию. При больших ускорениях и закончившихся переходных процессах фильтров значение W будет равно нулю, т.е. останется только интегральная коррекция. Максимальное влияние ускорения W на сигнал коррекции за время переходных процессов зависит от Δ2 и Wˆ* и 1 значительно меньше, чем при классическом демпфировании. Для построения интегрированной БИНС с GPS была сформирована модель ошибок БИНС. С учетом схемы демпфирования каналов тангажа и крена она в данном случае отличается от известных дополнительными членами демпфирования, и ее можно записать в форме (приведены уравнения только для α, β, χ): ˆ k ˆ k aˆ11 x1 aˆ21 x 2 aˆ31 x3 V3 / R 2(ˆ1ˆ 2 ˆ 0ˆ 3 )U 2 3 k [k4 (Wˆ4 Н ) k3 (Wˆ3Н )]; 3 3 V3 2(ˆ1ˆ 2 ˆ 0ˆ 3 ) R 1 4(ˆ1ˆ 2 ˆ 0ˆ 3 ) 2 (U 1 4(ˆ1ˆ 2 ˆ 0ˆ 3 ) 2 V3 R(1 4(ˆ1ˆ 2 ˆ 0ˆ 3 ) 2 ) ˆ k ˆ k aˆ12x1 aˆ22x 2 aˆ32x3 k [k4 (Wˆ4 Н ) k3 (Wˆ3Н )] 1 3 V1 R 3 3 ˆ k ˆ k2 aˆ13x1 aˆ23x 2 aˆ33x3 1 k [k2 (Wˆ2 Н ) k1(Wˆ1Н )]; 1 1 ) 2(ˆ1ˆ 2 ˆ 0ˆ 3 ) 1 4(ˆ1ˆ 2 ˆ 0ˆ 3 ) 2 ; (14) где âii – элементы кватернонной матрицы; i 1,3 . Для решения задачи интеграции БИНС-GPS с применением алгоритма ФК и включением оценок в обратную связь на каждом шаге 12 обработки данных формировались следующие измерения, использующие разность показаний БИНС и GPS: (15) y ; V1; V2 ; V3 ; T . Данные измерения позволяют полностью восстановить вектор состояния x и завести его в обратную связь. Это обстоятельство позволяет существенно уменьшить амплитуду колебаний ошибок БИНС (демпфировать их). При отсутствии сигналов GPS используется только схема автономного демпфирования каналов тангажа и крена. При формировании расчетной модели погрешностей БИНС смещения нулей гироскопов и акселерометров от запуска к запуску и их изменчивость в пуске аппроксимированы винеровскими процессами. Для трехточечного алгоритма выведены формулы определения параметров 0 и с использованием (9). Расстояние от маркеров до предварительно рассчитанной траекторией с нулевыми 0 и будет: Ri 2 1i 2 3i 2 02 (1i 2 3i 2 ) 2 (( Vtt cos Т dt) 2 2 (16) ( Vtt sin Т dt) ) 2 03i Vtt sin Т dt 2 01i Vtt cos Т dt, где i=1 для первого маркера; i=2 для второго маркера; Т – предварительно полученный азимут; 1i , 3i – координаты маркеров; tt – время движения объекта, исключая время остановок; V – скорость объекта в продольной оси объектового базиса X; 1i , 3i – проекции на оси 1, 3 ошибок Ri . Решением двух уравнений (16) для разных i являются четыре функции 0 ( f (Т , tt , V , 1i , 3i , Ri )) и соответствующие им четыре ( f (Т , tt , V , 1i , 3i , Ri )) , аналитический вид которых имеет очень громоздкую запись. Решение находится с помощью компьютера в символьном виде, а затем с использованием численных значений параметров. В трехточечном алгоритме необходимо просчитать траекторию движения, начиная с нулевого маркера на третий по счету. Затем вычислить наименьшее расстояние от траектории до первого и второго маркеров. Потом, используя формулы (16), найти решения относительно 0 и , которых будет четыре. Далее по четырем парам решений вычислить четыре возможных траектории движения снаряда. Получить сумму квадратов наименьших расстояний от двух маркеров до каждой из траекторий. Для какой траектории это расстояние окажется самым минимальным, соответствующая пара решений будет верной и может быть использована для дальнейших просчетов. В четвертой главе проведено математическое моделирование работы БИНС с использованием предложенных способов демпфирования. 13 Была проверена работа кватернионных уравнений БИНС с настройкой на частоту Шулера и введенным демпфированием по каналам тангажа и крена, оценены погрешности углов ориентации и навигационных параметров с учетом ошибок гироскопов и акселерометров, а также влияние введения демпфирования на точностные параметры БИНС. Для решения этих задач были заданы режимы движения морского объекта в географической системе координат . Качка ПО включалась при t=103 c и действовала до окончания движения. При моделировании использованы следующие значения параметров: 1 3 0,001 м / с 2 ; 2 4 0,0005 м / с 2 ; Т1 Т 3 0,1 с ; Т 2 Т 4 0,2 с ; k1 k3 1 ; k 2 k 4 2 ; К К 20000 / R 0,0031 . Значения погрешностей датчиков определялись и задавались по записям работающих приборов (гироскопов ОИУС-2000 и акселерометров АКП-2). Время моделирования 104 с, шаг интегрирования 0,01 с. Для БИНС с демпфированием характерно уменьшение погрешностей от 3 до 5 раз по большей части параметров. Погрешности углов ориентации с демпфированием составили (рис. 4): по азимуту – 0,1 град, тангажу – 10-3 град и крену – 10-3 град (без демпфирования 0,12, 9∙10-3, 12∙10-3 град, соответственно). Погрешности 1, 2 , 3 определения координат уменьшились с 3, 4, 9 км до 0,4, 0,8, 1,9 км, соответственно. БИНС с применением демпфирования уже не является невозмущаемой – система реагирует на действия ускорений. Однако точность системы в этом случае значительно повышается. Рис. 4. Погрешность определения параметров ориентации Также были проверены кватернионные уравнения работы БИНС при прохождении ПО через северный полюс и выполнении ПО «мертвой петли». В первом случае морской объект, подвергаясь воздействию качки по курсу, тангажу и крену, перемещался в северном направлении и 14 пересекал полюс. На широте 87 град происходило переключение с алгоритмов Эйлера-Крылова на кватернионные (из-за вырождаемости первых), а по выходе объекта из области высоких широт происходило обратное переключение. Во втором случае объект – самолет совершал эволюцию по тангажу от 0 град до 360 град, тем самым описывая «мертвую петлю». При превышении угла тангажа ±30 град происходило переключение на кватернионные уравнения. С учетом погрешностей реальных датчиков (как в предыдущем случае) при математическом моделировании были получены следующие результаты. При прохождении ПО через полюс погрешности определения координат местоположения объекта с помощью БИНС составили Δζ1=2,1 км, Δζ3=16,2 км за время t=1,4·104 с. При выполнении «мертвой петли» погрешности выработки навигационных параметров составили Δζ1=0,63 км, Δζ3=0,3 км за время t=2,5·103 с. Результаты говорят о том, что при прохождении ПО через особые точки точность БИНС не снижается. Исследование интегрированной БИНС-GPS проводилось с помощью математического моделирования. Параметры моделирования: 4 длительность работы – 10 с, широта – 51,5 град, долгота – 45,9 град, интегрирование – метод Адамса четвертого порядка, шаг 0,01 с, поступательное движение объекта на поверхности Земли, качка объекта по трем осям в течение времени – 103-104 с. Параметры датчиков: гироскопы – ОИУС-1000; акселерометры – АК-6. Погрешности GPS (типа МРК-11) – белые шумы при определении координат – 20 м, курса – 30 угл.мин. Использование данных GPS существенно повышает точность БИНС. При пропадании сигнала GPS с периодами 5 мин точность навигационных параметров остается на приемлемом уровне (10 м). Математическое моделирование работы интегрированной БИНС с применением трехточечного способа также показало работоспособность. Задавались параметры движения объекта, приближенные к движению внутритрубного снаряда в газовой трубе. Скорость 4 м/с. Контрольные точки через каждые 1-2 км. Параметры датчиков – гироскоп ТИУС-500, акселерометры КХ67-041. Использование трехточечного способа дало точность до 20 см на первой итерации в контрольных точках, позволило устранить неоднозначность в определении параметров азимутальной коррекции и автоматизировать процесс обработки траектории трасс. В пятой главе описано практическое применение построенных методик и алгоритмов к задачам подземной навигации. Был произведен расчет пространственного положения газопровода по данным опытно-промышленных испытаний ВИС СИТ-500 ЗАО «Газприборавтоматикасервис» на участке трассы длиной 40 км. Вычисленные по уравнениям (2)-(4), (9) координаты корректировались на основании данных приемников GPS в реперных точках, расположенных на расстоянии 0,5-1,5 км друг от друга. Определены координаты 15 трубопровода на дистанции 40 км, содержащей 42 реперные точки. На основании данных GPS с помощью трехточечного алгоритма определялись поправки по углу азимута и азимутальный дрейф гироскопов, которые использовались для коррекции. Перед запуском ВИС осуществлялась выставка, во время которой оценивались нулевые сигналы датчиков и прочие погрешности. Средняя скорость движения ВИС составила 0,7 м/с. Позиционная коррекция осуществлялась по показаниям акселерометров. С момента начала движения позиционная коррекция отключалась, и бесплатформенная система ориентации, интегрированная с одометром, функционировала в полностью автономном режиме. Результаты расчета на начальном участке приведены на рис. 5. Здесь сплошной линией показана рассчитанная траектория трубопровода в плане. Большими кружками и надписями типа «№ 3» показаны реперные точки. Для проверки точности расчетов использованы результаты позиционирования газопровода по GPS. На рис. 5 они показаны маленькими кружками. Средняя скорость дрейфа гироскопов составила 4,12∙10-6 рад/с. Максимальное отклонение координат газопровода, рассчитанных с помощью навигационной системы, от координат геодезических реперов составило 0,8 м. Данная точность не отличается от достигаемой на данный момент, однако трехточечный метод позволяет с первого раза определять параметры азимутальной коррекции. Рис. 5. План участка газопровода Аналогичным образом сравнением с показаниями GPS определялся план трубопровода с помощью БИНС (СИТ-1400) с автономным демпфированием по формулам (5)-(8). Максимальное отклонение рассчитанных координат газопровода от данных ЗАО «Газприборавтоматикасервис» (с использованием одометра) составило порядка 180 м в конце движения за 30 мин. На дистанции до 100 м можно использовать при необходимости (налипание грязи на одометр, переход на 16 разные диаметры труб) автономную БИНС со схемой демпфирования для определения траектории движения ВИС с точностью до 1 м. Таким образом, с помощью построенной математической модели решена практическая задача определения пространственного положения трубопровода с достаточной для практики точностью. Предложенная в диссертации модель на основе кватернионных корректируемых кинематических уравнений ориентации и навигации с применением алгоритмов и схем демпфирования показала хорошую точность при решении рассмотренных практических задач. В заключении обобщаются полученные в ходе исследований результаты работы. Основные результаты и выводы 1. Усовершенствованы кватернионные дифференциальные уравнения работы БИНС с настройкой на частоту Шулера путем введения ограничения ускорений после предварительной фильтрации при превышении заданного уровня. Данные уравнения обеспечивают определение местоположения ПО при произвольных углах его поворотов и движении. 2. Предложено применение в структуре БИНС демпфирующей схемы в каналах тангажа и крена с применением сглаживающих фильтров и нелинейных элементов в контуре коррекции по сигналам ускорений, приведенных в географический сопровождающий базис. 3. Получена модель ошибок БИНС в кватернионных параметрах с настройкой на частоту Шулера, отличающаяся от известных введением демпфирующих членов. 4. Разработана структура демпфирования шулеровских колебаний в оценках параметров ориентации и навигации путем интегрирования БИНС с GPS-приемником с использованием теории фильтрации Калмана. 5. Усовершенствован способ уменьшения погрешностей интегрированной БИНС с вычислением поправок по азимуту и азимутального дрейфа гироскопов при постобработке данных с использованием информации от GPS. 6. С помощью построенных алгоритмов проведено математическое моделирование работы БИНС с демпфирующими схемами при движении морского объекта с использованием моделей реальных датчиков первичной информации. Для автономной БИНС с учетом погрешностей гироскопов и акселерометров с демпфированием характерно уменьшение погрешностей по координатам с 3 (9) км до 0,4 (1,9) км, а для интегрированной БИНС-GPS сохранение точности в пределах 10 м за 5 мин автономной работы. Достигнутая точность находится в допустимых пределах для БИНС среднего класса точности. 17 7. Проведен расчет пространственного положения газопровода на участке трассы по экспериментальным данным с коррекцией от приемников GPS по высоте и в азимуте с применением схем демпфирования и трехточечного алгоритма. Сравнение расчетов по кватернионным уравнениям с более точными геодезическими данными (GPS) показало, что максимальная погрешность в плане составила 0,8 м. Применением схемы демпфирования каналов тангажа и крена автономной БИНС дало максимальную погрешность рассчитанных координат газопровода менее 1 м на дистанции до 100 м, что является приемлемым для автономной работы БИНС для внутритрубной навигации. Основные результаты диссертации опубликованы в работах: Публикации в центральных изданиях, включенных в перечень периодических изданий ВАК Министерства образования и науки РФ 1. Наумов, С. Г. Об уравнениях ошибок работы бесплатформенных инерциальных систем ориентации и навигации в кватернионных алгоритмах / С. Г. Наумов // Вестник Саратовского государственного технического университета. – 2008. – № 3 (35). – С. 94–100. 2. Наумов, С. Г. О демпфировании шулеровских колебаний автономных бесплатформенных инерциальных навигационных систем / С. Г. Наумов // Известия вузов. Поволжский регион. Технические науки. – 2009. – № 2. – С. 78–87. Патент 3. Пат. 2300079 РФ, МПК7 G 01 C 19/72. Инерциальный измерительный прибор / П. К. Плотников, С. Г. Наумов, В. Ю. Чеботаревский, А. И. Синев ; опубл. 27.05.07, Бюл. № 15. – 13 с. : ил. Публикации в других изданиях 4. Наумов, С. Г. О влиянии параметров движения на точность работы инерциальной навигационной системы в кватернионных алгоритмах / С. Г. Наумов // Математические методы в технике и технологиях – MMTT21 : сб. тр. XXI междунар. науч. конф. : в 10 т. / СГТУ. – Саратов, 2008. – Т. 7. – С. 33–34. 5. Наумов, С. Г. Математическая модель демпфирования бесплатформенной инерциальной навигационной системы / С. Г. Наумов // Интернет и инновации: практические вопросы информационного обеспечения инновационной деятельности : материалы междунар. науч.практ. конф. / СГТУ. – Саратов, 2008. – С. 232–236. 6. Наумов, С. Г. К вопросу о демпфировании колебаний Шулера в инерциальной навигационной системе / С. Г. Наумов // Осенняя Школа 18 молодых ученых (ММТТ-21) : сб. тр. XXI междунар. науч. конф. : в 11 т. / ТГТУ. – Тамбов, 2008. – Т. 11. – С. 222–225. 7. Исследование работы БИНС в условиях высоких широт с учетом погрешностей реальных датчиков / Ю. Н. Коркишко [и др.] // XVI СанктПетербургской Международной конференции по интегрированным навигационным системам : сб. тр. XVI международной конференции / ГНЦ РФ ЦНИИ «Электроприбор». – СПб., 2009. – С. 57–61. 8. Наумов, С. Г. Способ повышения точности работы автономной бесплатформенной инерциальной навигационной системы / С. Г. Наумов // Математические методы в технике и технологиях – MMTT-22 : сб. тр. XXII междунар. науч. конф.: в 10 т. / ППИ. – Псков, 2009. – Т. 9. – С. 198–200. 9. Наумов, С. Г. Способ повышения точности работы бесплатформенных инерциальных навигационных систем / С. Г. Наумов // Ломоносов : XVI Международная конференция студентов, аспирантов и молодых ученых : материалы докладов XVI Международной конференции / МГУ. – М., 2009. – 1 электрон. опт. диск (CD-ROM). Подписано в печать 25.11.09 Формат 60х84 1/16 Бум. офсет. Усл. печ. л. Тираж 100 экз. Заказ 1,0 515 Уч.-изд.л. 1,0 Бесплатно Саратовский государственный технический университет 410054, Саратов, Политехническая ул., 77 Отпечатано в Издательстве СГТУ. 410054, Политехническая ул., 77 19