Факультет компьютерных технологий и управления, оптико
advertisement

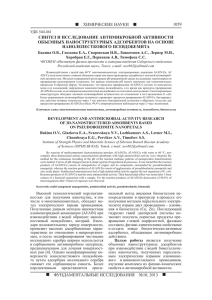
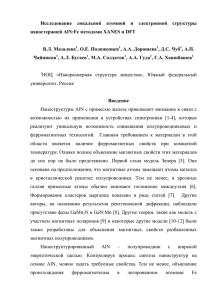
Лосев Сергей Владимирович Год рождения: 1990 Факультет компьютерных технологий и управления, оптикоцифровых систем и технологий, группа 6122 Направление подготовки: 200400 «Оптотехника» e-mail: losevsergio26@gmail.com УДК 535.31+53.072+62.51 ИССЛЕДОВАНИЕ И РАЗРАБОТКА СИСТЕМЫ РЕГИСТРАЦИИ ВЫСОКОСКОРОСТНОЙ ЦЕЛИ В ИК– ДИАПАЗОНЕ С.В. Лосев Научный руководитель – д.т.н., профессор А.В. Демин В магистерской диссертации рассматривается возможность реализации алгоритма повышения обнаружительной эффективности авиационного теплопеленгатора путем адаптивной схемы управления коэффициентом правдоподобия в системе приема и преобразования информации на основе редуцированной характеристической функции спектрально- характеристической модели летательного аппарата (ЛА). Наиболее перспективными системами поиска и обнаружения летательных аппаратов являются пассивные инфракрасные оптико-цифровые теплопеленгаторы (ОЦТ). Основными режимами работы авиационных ОЦТ являются: • режим пассивного сканирования окружающего самолет пространства IRST; • режим пассивного сканирования в фиксированной зоне FLIR. В общем случае вероятность обнаружения объекта (об) определяется значением «сигнал/шум» () на входе системы приема оптической информации (объектив и фотоприемное устройство) и выбранным критерием принятия решения () [1,2]. Вероятность обнаружения объекта теплопеленгатором на равномерном фоне определяется соотношением 1 Pоб 2 1 ; 0,64 hl 2 1,25 TR a rn q0 ;n T0 hl q 0 (1) При реальном ограничении на T0 возможно два пути повышения обнаружительной эффективности теплопеленгатора это либо за счет увеличения физической светосилы, либо за счет реализации адаптивной схемы обработки оптической информации. Увеличение физической светосилы фактически приводит к изменению массогабаритных параметров теплопеленгатора, а реализация в обнаружителе адаптивной обработки оптической информации может быть выполнена без изменения физической светосилы. Одной из возможных схем адаптивной обработки оптической информации это реализация в обнаружителе теплопеленгатора алгоритма управления коэффициентом правдоподобия. Основная цель работы заключается в построении адаптивной схемы управления коэффициентом правдоподобия в обнаружителе на основе редуцированной характеристической функции спектрально- характеристической модели ЛА. Определим спектрально- характеристическую модель ЛА как зависимость силы излучения, спектрального диапазона излучения, температуры тела ЛА, скорости полета и координаты его центра тяжести и симметрии энергетической светимости. Поскольку любой ЛА, в соответствии с законом Планка, можно представить в виде тела, обладающего определённой индикатрисой энергетической силы излучения, вид и значение которой зависят от габаритов, типа двигателя и скорости перемещения, то термооптическую модель ЛА можно определить следующим функционалом G F(T, V) G() . где F(T, V) теоретическая «индикатриса» интегральной силы излучения ЛА, G() прогнозная функция параметров термооптической модели ЛА. Для того, чтобы G () была инвариантна по отношению к любому типу ЛА она должна быть редуцированной характеристической функцией, которая может приведена к конкретному типу ЛА через показатель, характеризующий его, размерностью « Вт / ср К ». Источником излучения для ЛА является его двигатель, мощность которого помимо параметров топлива определяется и его сечением, а соответственно температура факела ( Т Ф ), может быть определена следующим соотношением [3], в котором приняты следующие обозначения: k – значение адиабаты, которая зависит от типа топлива, используемого в двигателе. T0 – температура продуктов сгорания за турбиной, p 2 – давление окружающей среды у сопла, принято считать атмосферным, p1 – давление в камере сгорания. p TФ T0 2 p1 k 1 k (3) Для нахождения значения облученности на входном зрачке теплопеленгатора необходимо учесть прохождение излучения через атмосферу. Облученность на входном зрачке теплопеленгатора с учетом потерь в атмосфере будет: 2 2 I ВхЗр IL exp k L IL exp k h Т 4 28, 4 H p ЛА T S exp k h (6) T a S 4 2 28, 4 H p T Т L exp k h Î ВхЗр ÎL2 exp k L с T Ф a где kλ – массовый коэффициент поглощения, L– длина трассы вещества, паров воды осажденных с определенного участка атмосферы; h– расстояние от ЛА до входного зрачка пеленгатора [км], ω - количество осажденной воды [см/км]; Нт– относительная влажность воздуха; p– парциальное давление паров воды (мм. рт. ст.) Та– температура окружающей среды [К]. Опытным путем установлено, что для средней полосы осаждаемый слой воды близ поверхности Земли приблизительно равен ω=1 см/км летом и 0,6 см/км зимой. В соответствии с теорией обнаружения сигналов соотношение для ожидаемой величины потерь () при заданных априорных переходных вероятностей для Н 0 / Н1 и решений «да»/«нет» имеет вид (7), где приняты следующие обозначения: Н1 (Ti ) решение объект обнаружен («да»); Н 0 (Ti ) решение ЛА не обнаружен («нет»); P0 (Ti ) / P1 (Ti ) распределения априорные вероятности присутствие/отсутствие («да»/«нет») ЛА в зоне чувствительности обнаружителя; p r H1 (Ti ) / p r H0 (Ti ) значение плотности вероятности «да»/«нет»; R множество точек в пространстве наблюдений (поточечная переменная по факту регистрации каждого «да»/«нет»); С10 , C00 , C01, C11 назначаемые коэффициенты риска в соответствии с критерием Байеса (возможен и другой критерий) на период времени Ti ; (R ) - отношение правдоподобия; - порог испытания; (R ) H1 критерий отношения правдоподобия; - порог испытания [4,5]. H0 C00P0 B0dR C10P0 B0dR C11P1 B1dR C01P1 B1dR Z0 Z1 Z1 Z1 B0 p r H 0 R H 0 ; B1 p r H1 R H1 H1 H1 ( R ) ;... ln ( R ) ln( ) H0 H0 P0 (C10 C00 ) P1 (C01 C11 ) С10 C00 , С01 C11 (7) Из соотношения (7) следует, что выбор значения коэффициентов риска C00 , С10 , C11, С01 влияет на эффективность работы обнаружителя по показателю вероятность обнаружения без изменения его оптико-физических параметров, что практически возможно не мене чем на 12%. Таким образом, если корректировать значения C00 , С10 , C11, С01 согласно заложенной априорной прогнозной функции G () в процессе работы обнаружителя, то достоверность принимаемого решения об обнаружении при реальном отношении «сигнал/шум» на входе обнаружителя будет выше, чем без коррекции, что равносильно повышению обнаружительной эффективности теплопеленгатора в режимах IRST или FLIR. 4 k 1 k p I ВхЗр 2 2898 (9) С01 1 1 T0 Î ВхЗр max p1 На рисунке 1 представлен предлагаемый алгоритм адаптивной схемы управления коэффициентом отношения правдоподобия при обработке информации Практический интерес вызывает построение прогнозных функций объектов наблюдения для корректировки работы решающего устройства теплопеленгатора в зависимости от условий наблюдения и характера обнаруживаемой цели, за счет чего достигается увеличение обнаружительной эффективности теплопеленгатора. Летательный аппарат можно рассматривать как максимум протяженный объект с угловым размером не более 1/8 поля зрения приемной оптической системы, возможно, построить редуцированную функцию спектрально- характеристической модели ЛА. Получаемый прибором сигнал от точечного объекта сводится к параметру энергетической силы света. В базах данных [6, 7, 8] приведена энергетическая сила света объектов или газов, которая получается на входном зрачке принимающего устройства, в нескольких спектральных диапазонах на разной высоте. Рассмотрим ракеты на твердотельном топливе, диаметр 0,65 м, топливо перхлорат– аммония p=1,13, нормальные условия, температура факела Т0=3642 [К], εс=1. Практические данные взяты из баз [6, 7, 8]. Анализируемые спектральные интервалы λ1-2 =3,5-5,5 мкм, λ3-4 = 8,0-14,0 мкм. Результаты получившихся расчетов приведены на рисунке 2. 4 Рисунок 1 Адаптивный алгоритм обнаружения высокоскоростных ЛА. HС 01 [км] Рис. 2 Получившиеся данные зависимость С01 для спектральных диапазонов 3-5 [мкм] и 8-14 [мкм]. Введение прогнозной функции G () в систему обработки данных позволит повысить реальную обнаружительную эффективность теплопеленгатора, и создаст возможность создания единой базы классов объектов обнаружения. В магистерской диссертации был предложен алгоритм влияния на коэффициенты риска C00 , С10 , C11, С01 в процессе работы пеленгатора на задании. Был предложен алгоритм обработки практической, накопленной информации для нахождения прогнозной функции G () , которая будет использоваться при назначении коэффициентов риска в зависимости от обстановки ведения наблюдения. Данный алгоритм имеет возможность работы, как с пеленгаторами типа FLIR, так и с пеленгаторами типа IRST. Литература 1. Р.М. Алеев, В.П. Иванов, В.А. Овсянников, Основы теории анализа и синтеза воздушной тепловизионной аппаратуры. Казань: Изд-во Казанского ун-та. 2000г. 2. А.В. Демин, С.И. Жуков, Алгоритм пассивного детектирования высокоскоростных объектов, Изд.: Mеждународный конгресс по интеллектуальным системам и информационным технологиям, Геленджик 2013г. 3. М.В. Мурашов, С.Д Панин., Распознавание объектов в инфракрасном диапазоне / Учеб. пособие – М.: Изд- во МГТУ им. Н. Э. Баумана. 2008 г. 4. Г. Ван Трис, Теория обнаружения, оценок модуляции, М.1975г. Подпись участника__________________________________ Подпись научного руководителя______________________