Лекция 2. 1. Физические основы механики
advertisement

Лекция 2.
1. Физические основы механики
Окружающий нас мир, всё существующее вокруг нас и обнаруживаемое нами посредством
ощущений представляет собой материю. В настоящее время известны два вида неживой материи – вещество и поле. Неотъемлемым свойством материи и формой её существования является движение. Движение в широком смысле слова — это всевозможные изменения материи —
от простого перемещения до сложнейших процессов мышления. Движение несотворимо и неуничтожимо, как и сама материя. Материя существует и движется в пространстве и во времени, которые являются формами бытия материи.
Механическое движение — это изменение в пространстве с течением времени взаимного
расположения тел или их частей.
Механика — часть физики, которая изучает закономерности механического движения и
причины, вызывающие или изменяющие это движение.
Механика делится на три раздела: 1) кинематику; 2) динамику; 3) статику.
Кинематика изучает движение тел, не рассматривая причины, которые это движение обусловливают.
Динамика изучает законы движения тел и причины, которые вызывают или изменяют это
движение.
Статика изучает законы равновесия системы тел. Если известны законы движения тел, то
из них можно установить и законы равновесия. Поэтому законы статики отдельно от законов
динамики физика не рассматривает.
Развитие механики как науки начинается с III в. до н. э., когда древнегреческий ученый Архимед (287—212 до н. э.) сформулировал закон равновесия рычага и законы равновесия плавающих тел. Основные законы механики установлены итальянским физиком и астрономом Г. Галилеем (1564—1642) и окончательно сформулированы английским ученым И. Ньютоном
(1643—1727).
Механика Галилея — Ньютона называется классической механикой. В ней изучаются законы движения макроскопических тел, скорости которых малы по сравнению со скоростью
света в вакууме. Законы движения макроскопических тел со скоростями, сравнимыми со скоростью с, изучаются релятивистской механикой, основанной на специальной теории относительности, сформулированной А.Эйнштейном (1879—1955). Для описания движения микроскопических тел (отдельные атомы и элементарные частицы) законы классической механики
неприменимы — они заменяются законами квантовой механики.
1.1. Кинематика. Основные понятия кинематики
Основной задачей кинематики является нахождение положения тела в любой момент времени, если известны его положение, скорость и ускорение в начальный момент времени.
Механическое движение относительно. Движение одного и того же тела относительно разных тел оказывается различным. Для описания движения тела нужно указать, по отношению к
какому телу рассматривается движение. Это тело называют телом отсчёта. Оно считается неподвижным (для данной задачи).
Положение тела в пространстве описывается с помощью системы координат. Реальное
пространство трёхмерно, и положение материальной точки в любой момент времени полностью
определяется тремя числами — её координатами в выбранной системе отсчета.
Как правило, используют прямоугольную, или декартову, систему координат1. Для описания движения точки, кроме тела отсчёта и системы координат, необходимо ещё иметь часы –
устройство, с помощью которого можно измерять различные отрезки времени.
1 Впервые прямоугольную систему координат ввел Рене Декарт в своей работе «Рассуждение о методе» в 1637
году. Поэтому прямоугольную систему координат называют также — Декартова система координат. Координатный метод описания геометрических объектов положил начало аналитической геометрии. Вклад в развитие коор-
Тело отсчёта, система координат и связанные с ней часы образуют систему отсчета.
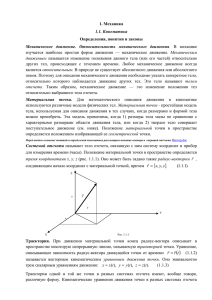
Рисунок 1. Система отсчёта
OX — ось абсцисс, OY — ось ординат, OZ — ось аппликат.
Возьмем какую-нибудь точку в пространстве, М (x, y, z). Здесь x, y, z – координаты точки М
в данной системе координат. Проведем из начала координат к точке М вектор . Этот вектор
называется радиус–вектором точки М.
Рисунок 2. Точка и её координаты
Положение точки M в данный момент времени в выбранной системе отсчёта характеризуется тремя координатами х, у и z или радиус-вектором , проведенным из начала системы координат в данную точку (рис. 5).
Единичным вектором или ортом называется вектор, длина которого равна единице и который направлен вдоль какой-либо координатной оси.
Единичный вектор, направленный вдоль оси x,обозначается i . Единичный вектор, направлен
ный вдоль оси y, обозначается j . Единичный вектор, направленный вдоль оси z, обозначает
ся k .
Вектора i , j , k называются координатными векторами. Радиус-вектор точки М можно
представить в виде суммы произведений ортов на соответствующие координаты точки М:
r x i y j z k
динатного метода внес также Пьер Ферма, однако его работы были впервые опубликованы уже после его смерти.
Декарт и Ферма применяли координатный метод только на плоскости.
Координатный метод для трёхмерного пространства впервые применил Леонард Эйлер уже в XVIII веке.
Рисунок 3. Орты и радиус-вектор точки.
Механика для описания движения тел в зависимости от условий конкретных задач использует разные физические модели. Простейшей моделью является материальная точка — тело,
обладающее массой, размерами которого в данной задаче можно пренебречь. Понятие материальной точки — абстрактное, но его введение облегчает решение практических задач. Например, изучая движение планет по орбитам вокруг Солнца, можно принять их за материальные
точки.
Произвольное макроскопическое тело или систему тел можно мысленно разбить на малые
взаимодействующие между собой части, каждая из которых рассматривается как материальная
точка. Тогда изучение движения произвольной системы тел сводится к изучению системы материальных точек. В механике сначала изучают движение одной материальной точки, а затем
переходят к изучению движения системы материальных точек.
Под воздействием тел друг на друга тела могут деформироваться, т. е. изменять свою форму и размеры. Поэтому в механике вводится еще одна модель — абсолютно твердое тело. Абсолютно твердым телом называется тело, которое ни при каких условиях не может деформироваться и при всех условиях расстояние между двумя точками (или точнее между двумя частицами) этого тела остается постоянным.
Любое движение твердого тела можно представить как комбинацию поступательного и
вращательного движений. Поступательное движение — это движение, при котором любая
прямая, жестко связанная с движущимся телом, остается параллельной своему первоначальному положению. При поступательном движении все точки тела описывают одинаковые траектории и в любой момент времени имеют одинаковые скорости и ускорения. Поэтому для описания такого движения тела достаточно описать движение его одной произвольной точки.
Вращательное движение — это движение, при котором все точки тела движутся по
окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения.
Линия, которую описывает движущееся тело в определенной системе отсчета, называется траекторией. На практике форму траектории задают с помощью математических формул
(y = f(x) — уравнение траектории) или изображают на рисунке. Вид траектории зависит от выбора системы отсчета. Например, траекторией тела, свободно падающего в вагоне, который
движется равномерно и прямолинейно, является прямая вертикальная линия в системе отсчета,
связанной с вагоном, и парабола в системе отсчета, связанной с Землей.
В зависимости от вида траектории различают прямолинейное и криволинейное движение.
В зависимости от скорости различают равномерное (скорость не изменяется) и неравномерное (ускоренное, равноускоренное, прерывистое) движение.
Схематично это можно представить так:
Рисунок 4. Механическое движение
Путь s — скалярная физическая величина, определяемая длиной траектории, описанной телом за некоторый промежуток времени. Путь всегда положителен: s > 0.
Перемещение
тела за определенный промежуток времени — направленный отрезок
прямой, соединяющий начальное (точка M0) и конечное (точка М) положение тела (см. рис. 8):
где
и
— радиус-векторы тела в эти моменты времени.
Рисунок 5. Путь и перемещение
Проекция перемещения на ось Ox:
начальный и конечный моменты времени.
, где x0 и x — координаты тела в
Модуль перемещения не может быть больше пути:
.
Знак равенства относится к случаю прямолинейного движения, если направление движения
не изменяется.
Зная перемещение и начальное положение тела, можно найти его положение в момент времени t:
Если бы мы рассматривали движение тела в пространстве, добавилось бы третье уравнение:
z z 0 rz ,
Таким образом, изменения радиус-вектора описываются функцией координат и времени:
r r ( t ) {x ( t ), y( t ), z( t )},
r x 2 y2 z2.
Скорость — мера механического состояния тела. Она характеризует быстроту изменения
положения тела относительно данной системы отсчета и является векторной физической величиной.
Часто бывают важны усреднённые значения физических величин. Для их обозначения используется знак ¯ или < >.
Средняя скорость
— векторная физическая величина, численно равная отношению
перемещения к промежутку времени, за который оно произошло, и направленная вдоль перемещения (рис. 7):
Рисунок 6. Скорость
В СИ единицей скорости является метр в секунду (м/с).
Средняя скорость, найденная по этой формуле, характеризует движение только на том
участке траектории, для которого она определена. На другом участке траектории она может
быть другой.
Иногда пользуются средней скоростью пути:
, где s — путь, пройденный за
промежуток времени Δt. Средняя скорость пути — это скалярная величина.
Мгновенная скорость
тела — скорость тела в данный момент времени (или в данной
точке траектории). Она равна пределу, к которому стремится средняя скорость за бесконечно
малый промежуток времени
. Здесь
— производная от радиусвектора по времени.
Мгновенная скорость , таким образом, есть векторная величина, равная первой производной радиуса-вектора движущейся точки по времени.
В проекции на ось Ох:
Аналогичные формулы можно записать для проекций вектора скорости на другие оси.
Мгновенная скорость тела направлена по касательной к траектории в каждой ее точке в сторону движения (см. рис. 9).
Рисунок 7
Ускорение — векторная физическая величина, характеризующая быстроту изменения скорости. Оно показывает, на какую величину изменяется скорость тела за единицу времени.
Среднее ускорение — физическая величина, численно равная отношению изменения скорости ко времени, за которое оно произошло:
Вектор
направлен параллельно вектору изменения скорости
рону вогнутости траектории (рис. 8).
Мгновенное ускорение:
) в сто-
(
В СИ единицей ускорения является метр на секунду в квадрате (м/с2).
В общем случае мгновенное ускорение направлено под углом к скорости. Зная траекторию, можно определить направление скорости, но не ускорения. Направление ускорения
определяется направлением равнодействующей сил, действующих на тело.
При прямолинейном движении с возрастающей по модулю скоростью (рис. 9, а) векторы
и
сонаправлены (
) и проекция ускорения на направление движения положительна.
При прямолинейном движении с убывающей по модулю скоростью (рис. 9, б) направления
векторов и
противоположны (
) и проекция ускорения на направление движения
отрицательна.
Рисунок 8
Вектор при криволинейном движении можно разложить на две составляющие, направленные вдоль скорости
и перпендикулярно скорости
(рис. 10),
— тангенциальное
ускорение, характеризующее быстроту изменения модуля скорости при криволинейном движении,
— нормальное ускорение, характеризующее быстроту изменения направления вектора
скорости при криволинейном движении. Модуль ускорения
.
Рисунок 9
Длина пути, пройденного точкой за промежуток времени от t1 до t2, определяется интегралом
В случае равномерного движения числовое значение мгновенной скорости постоянно; тогда
это выражение примет вид
Относительность движения. Сложение скоростей. Если движение точки рассматривается из
двух систем отсчета К и К',
оси
которых остаются все время параллельными друг другу, то
между скоростями точки v и v относительно этих систем отсчета в каждый момент времени
выполняется соотношение
v
v vK ,
(1)
где v K - скорость системы K относительно системы K . Такое же соотношение выполняется и
для ускорений: а = а' + a K .