Обсуждение метода масштабирования - НПП «ПОРА-USWO
advertisement

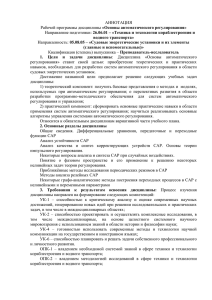
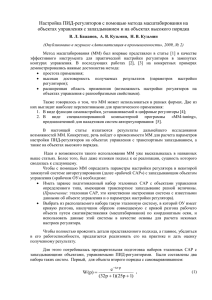
Метод масштабирования для определения параметров настройки регуляторов в замкнутых САР Бажанов В.Л (Журнал «Приборы и Системы. Управление, контроль, диагностика». № 12, 2002) Уникальные возможности цифровой техники принципиально усовершенствовали процесс проектирования АСУТП, подняли на качественно новый уровень процессы сбора, обработки, представления и хранения информации. Что касается качества выполнения функции управления в АСУТП, то в этой части прогресс пока гораздо скромнее. Налицо явное недоиспользование возможностей цифровой техники. Среди причин этого выделим одну, которая может считаться традиционной. Речь идет о хронически низком качестве настройки регуляторов в замкнутых системах автоматического регулирования (САР). Практика показывает, что работа подавляющего большинства систем управления на предприятиях может быть существенно улучшена без каких либо дополнительных затрат на их модернизацию, а только за счет оптимизации настройки регуляторов. Это означает, что производственники (пользователи АСУТП) несут совершенно неоправданные потери из-за снижения производительности оборудования, качества выпускаемой продукции, повышенного расхода сырья, энергоресурсов. Заставить автоматику работать с максимальной эффективностью – задача не всегда простая даже для специалистов. Причина в том, что традиционные инженерные методики настройки регуляторов либо чрезмерно трудоемки, либо не обладают необходимой точностью. Как правило, их применение позволяет обеспечить устойчивость САР (т.е. работоспособность системы), но не гарантирует ее качественной работы. Задачу определения рациональных настроек регуляторов дополнительно усложняют различия в программной реализации законов управления, наблюдаемые, у разных изготовителей регуляторов. В первую очередь это относится к ПИД закону. В результате качество работы замкнутых САР с одинаковыми объектами управления (ОУ) и с одинаково настроенными регуляторами, но от разных изготовителей оказываются разными и, зачастую, весьма существенно. Принято считать, что наилучшим решением проблемы является передача функций выбора параметров настройки самим цифровым регуляторам. С этой целью для них разрабатываются функции автонастройки. Однако, в силу сложности их разработки, существующие на текущий момент функции «срабатывают» (т.е. завершаются успешным результатом) на ограниченном классе объектов управления. Ещё уже оказывается круг объектов, на которых автонастройка приводит к действительно рациональному результату. Как правило, полученные автонастройкой параметры регуляторов допускают последующую оптимизацию с ощутимым повышением качества работы САР. Всё сказанное свидетельствует о том, что проблема определения рациональных настроек регуляторов в замкнутых САР еще не нашла своего окончательного решения. Излагаемый далее метод масштабирования (ММ) можно рассматривать как один из возможных подходов к решению названной проблемы. Основная идея метода состоит в том, чтобы при определении параметров настройки регулятора в замкнутой САР с заданным (рабочим) объектом управления, использовать сведения о другой качественно настроенной системе с другим объектом управления, но с регулятором того же типа. Последнюю САР условимся называть эталонной. Она аккумулирует в себе ранее накопленный опыт настройки регуляторов. Наладчик располагает сведениями об объекте управления в эталонной САР (об эталонном ОУ), а также о параметрах настройки регулятора в ней (эталонных параметрах). Предполагается, что при этих настройках характер переходных процессов в эталонной системе и показатели качества управления являются предпочтительными. Это существенный момент, поскольку ММ ориентирован на получение подобных по виду переходных процессов управления в настраиваемой (рабочей) и эталонной системах регулирования. Для всех известных методов определения настроек регуляторов обязательными являются сведения о реакции объекта управления на управляющее воздействие. Особенность ММ состоит в расширении состава необходимых исходных данных. Наряду с обязательными (традиционными) сведениями о рабочем объекте управления требуется также информация об эталонной системе. Алгоритм реализации ММ сводится к трем действиям: 1. Аппроксимации эталонного и действительного объектов управления математической моделью определенного вида (о выборе модели будет сказано дальше). 2. Введению искусственной системы координат ( х , t ) и определению масштабных коэффициентов Мх и Мt , связывающих между собой координаты реальной (x, t) и искусственной систем. Цель второго действия - привести запись математической модели действительного объекта управления в искусственной системе координат к виду математической модели эталонного объекта управления. Тогда и параметры настраиваемого регулятора в искусственной координатной системе должны будут совпадать с параметрами эталонного регулятора. 3. Переводу эталонных настроек регулятора из искусственной системы координат в реальную с помощью ранее определенных масштабных коэффициентов Мх и Мt . /Полученный результат будет представлять собой искомое решение задачи определения параметров регулятора в настраиваемый САР/. Представленный алгоритм метода масштабирования допускает разные варианты в реализации, которые могут отличаться как трудоемкостью, так и точностью. Неизбежно придется наработать определенный опыт, чтобы найти варианты, позволяющие надежно определять рациональные настройки регуляторов на объектах управления наиболее широкого класса. Рассмотрим один из возможных способов реализации метода масштабирования. Начнем с настройки конкретной системы авторегулирования. Допустим, требуется определить параметры ПИД-регулятора DR-19 с аналоговым выходным сигналом 420 мА (Siemens), в замкнутой САР с объектом управления, о свойствах которого можем судить по экспериментально снятой переходной характеристике (кривой разгона), представленной на рисунке 11. 12 X,% 10 8 6 4 2 сек 0 0 50 100 150 200 250 300 Рис.1. Переходная характеристика рабочего объекта управления (ступенчатое входное воздействие U = 10%). Для применения ММ необходима эталонная система. Из ряда ранее настроенных (нами, или кем-то) САР с тем же типом регулятора DR-19 выберем ту, которую считаем настроенной наиболее удачно. Пусть информация об объекте 1 Переходная характеристика соответствует объекту с передаточной функцией 1 W( p ) ( 60 p 1 )( 30 p 1 ) (1) управления в эталонной системе доступна нам только в виде экспериментальной кривой разгона (см. рисунок 2). 20 X,% 16 12 8 4 сек 0 0 20 40 60 80 100 Рис.2. Переходная характеристика эталонного объекта управления (ступенчатое входное воздействие U = 10%). Известны параметры настройки регулятора в этой системе2 Ср=2.6; Тп=41с; Ти=7.7с; VV=5.0 , (2) Применение ММ предусматривает аппроксимацию рабочего (рис.1) и эталонного (рис.2) объектов управления математической моделью единого вида. Опыт показал, что ММ допускает использование математических моделей различного типа (это один из источников неоднозначности реализации ММ). Остановим выбор на следующем варианте модели: W( p ) K ( Tp 1 ) p (5) Её достоинством является простое геометрическое представление параметров К и Т на переходной характеристике (рис.3). Это облегчает процедуру аппроксимации объектов управления. Указаны принятые в Siemens обозначения параметров настройки ПИД регуляторов. Они связаны с обозначениями, принятыми в отечественной практике, следующим образом: Ср=Кп; Тп=Ти; Ти=ТД (3) Параметр VV является особенностью регуляторов Siemens. Он меняет конфигурацию Dсоставляющей в ПИД законе, оставляя неизменной её “энергетику” - КдТд, а именно: Ти Кд=СрVV; Т (4) VV (при VV=1 D-составляющая реализуется в традиционном виде). 2 Д Рис. 3. Реакция математической модели (5) на входное воздействие в виде ступеньки величиной U. Следует заметить, что математическая модель (5) является описанием астатического объекта управления. В связи с этим при аппроксимации статических объектов управления (т.е. объектов с самовыравниванием) она способна служить приближением только для начальной части кривой разгона. Оказывается этого вполне достаточно. Итак, первое действие алгоритма ММ – аппроксимация эталонного и рабочего объектов управления выбранной моделью (5). Задача заключается в определении значений параметров К и Т, при которых модель наиболее точно описывает начальные участки переходных характеристик рабочего и эталонного объектов управления. Аппроксимацию можно выполнять различными методами. Например, методом наименьших квадратов (МНК), или графическим способом, проводя касательную в точке перегиба на рисунке 1 и асимптоту на рисунке 2. Но надежнее и быстрее получить достоверный результат позволяет специальная программа визуальной аппроксимации “VAPW”, разработанная в НПП “ПОРА-USWO”. Применив “VAPW”, убеждаемся, что наиболее точная аппроксимация начального участка переходной характеристики рабочего объекта управления обеспечивается математической моделью (5) с параметрами: То=12с; Ко=0,0125 (6) Кривую разгона эталонного объекта управления (рисунок 2) модель (5) хорошо описывает при значениях параметров Тэ=14с; Кэ=0,02 (7) Первое действие алгоритма ММ выполнено. Математические модели, аппроксимирующие объекты управления, определены: рабочий ОУ: W( p ) 0 ,0125 р( 12 p 1 ) (8) W( p ) 0 ,02 р( 14 p 1 ) (9) эталонный ОУ: Второе действие в алгоритме ММ предусматривает введение искусственной системы координат ( х , t ), в которой запись математической модели рабочего ОУ будет точно совпадать с записью математической модели эталонного ОУ (9) в реальных координатах. Передаточной функции (5) с параметрами То и Ко соответствует дифференциальное уравнение 2-го порядка d 2 xt dxt To K o У t dt 2 dt (10) Введем масштабные коэффициенты, линейно связывающие реальную (x, t) и искусственную ( х , t ) координатные системы: Мt t t Мх х х (11) (12) Чтобы перевести уравнение (10) в искусственную систему координат, нужно из соотношений (11, 12) выразить t и х и подставить их в (10). To d 2 ( Мх X t ) d Мt t 2 d ( Mx X t ) Ko У t d Мt t (13) После преобразований уравнение (13) принимает вид To d 2 x t d xt K o Mt У t Мt d t 2 Mx dt (14) Чтобы запись уравнения (14) полностью совпала с математической моделью эталонного объекта управления Тэ d xt Кэ Уt , d2 x t dt 2 dt (15) нужно потребовать выполнения условий: К о Мt Kэ Mx То Tэ ; Мt (16) Из системы уравнений (16) однозначно определяются значения масштабных коэффициентов Мх и Мt То Tэ (17) Ко То Кэ Тэ (18) Мt Мх Выражения (17), (18) – это итог выполнения 2-го действия алгоритма ММ. Они определяют численные значения масштабных коэффициентов, связывающих искусственную и реальную системы координат. Для рассматриваемого примера (8), (9) формулы (17), (18) дают конкретные значения масштабных коэффициентов: Mt=0,857 Mx=0,536 (19) Можно приступить к завершающему, третьему действию алгоритма ММ. Исходим из утверждения, что если модель рабочего объекта управления в искусственной координатной системе ( х , t ) совпадает с моделью эталонного объекта, то и параметры настраиваемого регулятора в искусственных координатах должны совпадать с известными параметрами настройки эталонного регулятора, т.е.: Кр К эр , Ти Т иэ , Тd Tdэ (20) Теперь задача 3-го действия состоит в том, чтобы, используя известные масштабные __ __ коэффициенты Мх и Мt, «перевести» настройки регулятора __ ( Kp, Tu, Td ) из искусственной системы координат в реальную и, таким образом, получить искомый результат. Обратимся к выражению, которое описывает ПИД-регулятор в искусственной системе координат: У( t ) K Х ( t ) э p Следует отметить, что K pэ Tиэ X ( t )d t K p Td э э d X(t ) dt (21) X ( t ) в представленной записи имеет смысл рассогласования. Для перевода ПИД регулятора (21) в реальную систему координат нужно выразить X и t из соотношений (11), (12) и подставить их в выражение (21). X d X(t ) K X(t ) t Mx э э э У( t ) K p Mx d Mt K p Td t , Mx T d Mt э p (22) Осталось привести выражение (22) к традиционной форме записи ПИД закона: К рэ Т dэ Мt dx У( t ) Х(t ) э Х ( t )dt Мх Т и Мх Мt Мх dt К рэ К рэ (23) Запись (23) делает очевидными искомые значения параметров настройки ПИД-регулятора в реальной системе координат: Кр К рэ Мх (24) Ти Т иэ Мt (25) Td Tdэ Mt (26) Если учесть соотношения (17) и (18), то можно записать решение для настроек ПИД-регулятора непосредственно через параметры математических моделей, аппроксимирующих эталонный и действительный объекты управления Кр К рэ Кэ Тэ Ко То (27) Ти Т иэ То Тэ (28) Т d Т dэ То Тэ (29) Алгоритм ММ пройден до конца. Его итогом явились простые формулы, позволяющие по данным эталонной системы рассчитывать настройки ПИДрегуляторов на разнообразных объектах управления. В рассматриваемом примере расчеты по формулам (24, 25, 26) приводят к следующим значениям параметров: Кр 4,9 (30) Ти 35,1 (с) (31) Тd 6,6 (с) (32) Для качественной оценки полученного по ММ результата на рисунке 4 представлены переходные процессы в рабочей САР с объектом (1) и регулятором DR-19, имеющим параметры настройки (30, 31, 32). Для сравнения показаны также процессы при настройках, которые выбрал для себя регулятор DR-19 с помощью функции автоадаптации (Ср=2.8; Тп=32.7с; Ти=5.4с; VV=5). 65 61 X,% 60 X,% ММ 60 ММ 59 55 58 А 57 56 АДАПТ АДАПТ 55 45 сек 54 0 40 80 120 160 Б 50 200 сек 40 240 0 40 80 120 160 200 Рис. 4. Динамические процессы в замкнутой САР при настройках регулятора DR-19, полученных автоадаптацией и методом масштабирования. «А» – при ступенчатом возмущении -20%, приложенном ко входу объекта управления; «Б» – при изменении уставки задания регулятору с 40% на 60%. Процессы в САР при ММ-настройках, выглядят немного предпочтительнее. При этом следует учесть, что функция автоадаптации у ПИД-регуляторов DR-19 особо «заточена» именно под объекты управления второго порядка с самовыравниванием (как в примере). На объектах с более сложной динамикой преимущество ММ-настроек оказывается ощутимее. Обсуждение метода масштабирования Прежде всего, следует еще раз подчеркнуть отличительную особенность ММ – использование позитивного опыта настройки регуляторов на других объектах управления. Именно такой опыт и заключен в сведениях об эталонной САР. Профессиональный наладчик может иметь не одну, а достаточно богатый набор эталонных САР с различным характером переходных процессов. Тогда у него появляется возможность предлагать пользователю (технологу) самому выбрать наиболее предпочтительный характер управления для своего оборудования. Это, несомненно, полезное свойство ММ. Для практики важен вопрос надежности метода масштабирования. Другими словами, всегда ли ММ будет приводить к настройкам, обеспечивающим подобие переходных процессов в рабочей и эталонной системах? Ответ на этот вопрос положительный. Конечно, при условии, что метод реализуется корректно. Неудачный выбор математической модели для аппроксимации объектов управления, небрежное выполнение самой аппроксимации, невнимание к существенным отличиям эталонной и рабочей систем (например, по типу исполнительных устройств и т. п.), могут привести к ошибочному результату. Но практика показывает, что при наличии даже начального опыта применение ММ становится уже успешным. Изложение ММ было построено на примере настройки регуляторов с ПИД законом управления. Отметим теперь, что метод, вообще говоря, не устанавливает ограничений на закон управления и может быть адаптирован к любому из них. Наглядным подтверждением этому является успешное использование ММ для настройки регуляторов с USWO законом управления [1]. Параметры настройки USWO закона отличаются по смысловому содержанию от параметров ПИД закона. Соответственно меняются формулы для их расчета, хотя уровень сложности формул не повышается. Универсальность ММ в отношении законов управления является ещё одним достоинством ММ. Выше уже отмечалась особенность цифровых ПИД-регуляторов, вызывающая затруднения при их настройке - разная программная реализация ПИД закона управления у разных производителей регуляторов. ММ позволяет обойти это препятствие, благодаря способности адаптироваться к любому варианту реализации. Суть адаптации состоит в том, что в эталонной САР должен использоваться регулятор той же самой модификации, что и в настраиваемой (рабочей) САР. При несоблюдении этого условия не обязательно возникнет ошибка, но вероятность ошибочного результата становится выше. Наладчику систем регулирования, применяющему ММ, можно рекомендовать принцип: «Для каждой модификации ПИД-регулятора – своя эталонная САР». И тогда ММ будет практически безотказен. Одним из факторов, затрудняющих качественную настройку регуляторов в замкнутых САР, является транспортное запаздывание. Напомним, что под этим понимается задержка на некоторое время воздействия регулятора. tz реакции объекта управления на ММ пригоден для настройки САР с запаздывающими объектами. При этом возможны две ситуации. Первая возникает в случае, когда в цифровом регуляторе присутствует предиктор Смита. Поскольку при его использовании настройка регулятора ведется без учета запаздывания объекта, то, применяя ММ, следует выбирать эталонную САР с объектом, не обладающим запаздыванием. И выполняя аппроксимацию рабочего объекта управления математической моделью (5), нужно отбросить у него время запаздывания. Все остальные действия ММ выполняются в точности так же, как было изложено выше. Вторая ситуация наблюдается в случае отсутствия в регуляторе предиктора Смита. Тогда для корректного применения ММ необходимо располагать сведениями об эталонных САР с объектами, имеющими транспортное запаздывание. Причем различной величины. Математическая модель, предназначенная для аппроксимации эталонного и рабочего объектов управления также должна учитывать запаздывание. Например: W( p ) K exp( tz p ) p( Tp 1 ) (33) Из имеющегося набора эталонных САР следует выбрать для использования ту систему, у которой объект управления обладает отношением tzэ/Tэ, наиболее близким к отношению tzо/Tо у рабочего объекта. Остальные действия алгоритма ММ изменений не потребуют. Для ПИД-регуляторов останутся справедливыми расчетные формулы (27, 28, 29). Обсуждение ММ можно завершить замечанием, что выполнение действий ММ можно частично или полностью передать самому цифровому регулятору. Вариант частичной передачи был изначально реализован в опытной модели микропроцессорного USWO-регулятора. Действия ММ распределились между наладчиком САР и настраиваемым регулятором. На наладчика возложена аппроксимация рабочего объекта управления математической моделью (5) и ввод в регулятор параметров модели То и Ко, полученных при аппроксимации. На долю регулятора выпало завершение ММ, а именно: - выбор рабочей эталонной САР из библиотеки эталонных САР, организованной в памяти цифрового регулятора; - расчет для себя искомых параметров настройки по установленным формулам (подобным (27, 28, 29)). Такой вариант настройки регуляторов можно назвать полуавтоматическим. Он существенно сокращает время, затрачиваемое на наладку САР, повышает её качество. Опыт работы с полуавтоматической настройкой показал, что при использовании программы VAPW затраты времени на определение рациональных параметров регулятора сокращаются примерно в три раза. В дальнейшем полуавтоматический режим определения параметров настройки на основе ММ был разработан и для регуляторов с ПИД законом управления. Если передать регулятору выполнение всех действий ММ, то это будет означать появление нового варианта реализации функции автонастройки для цифровых регуляторов. Для осуществления этого требуется разработать и добавить к режиму полуавтоматической настройки подпрограмму аппроксимации рабочего объекта управления математической моделью (5), т.е. подпрограмму определения параметров То и Ко. Задача вполне разрешимая. В заключение следует сказать несколько слов о перспективности использования ММ в SCADA-системах в виде дополнительного программного компонента. Вычислительные ресурсы SCADA позволяют реализовать ММ наиболее полно и качественно. Это означает, что такая реализация будет располагать богатой библиотекой эталонных САР. Она позволит учитывать специфические особенности рабочей системы. Даст возможность настраивать регуляторы практически на всех допустимых объектах управления. Обеспечит настройку регуляторов с учетом предпочтительного характера переходных процессов в настраиваемых системах. И, наконец, она будет применима для настройки регуляторов (контроллеров) всех типов и модификаций, допускаемых к использованию SCADA-системой. Благодаря ММ значительно сократится время, затрачиваемое на пуско-наладку АСУТП, а главное, повысится качество автоматического управления - основной функции АСУТП. Ссылки на литературу: 1. Бажанов В.Л. Универсальный микропроцессорный регулятор с USWO алгоритмом управления // Приборы и системы. Управление, контроль, диагностика. – 2000.- № 1.