аппроксимация сил и моментов трения в модели вязко
advertisement

1757
УДК 481.86
АППРОКСИМАЦИЯ СИЛ И МОМЕНТОВ
ТРЕНИЯ В МОДЕЛИ ВЯЗКО-УПРУГОЙ
ПЛОСКОСТИ
А.А. Зобова
МГУ им. М.В. Ломоносова
Россия, Москва
E-mail: azobova@mech.math.msu.su
Ключевые слова: шероховатая вязко-упругая плоскость, трение
Аннотация: Рассматривается модель вязко-упругой плоскости, предложенная в [7],
которая состоит в следующем: предполагается, что в каждой инфинитезимальной
области контакта возникает вертикальная плотность силы и плотность силы классического трения Кулона. Силы и моменты, действующие со стороны плоскости на
шар, вычисляются интегрированием плотностей по пятну контакта. За счет вязкой
компоненты вертикальной силы размер и форма пятна контакта и распределение
нормальных давлений зависят от скорости центра масс шара, что качественно отличает рассматриваемую модель от аналогичных моделей со статическими моделями
распределения давлений в пятне контакта [1–6]. Подробное обсуждение этой модели
и аналитическое решение задачи о прямом ударе и качении шара по плоскости с
начальными условиями общего вида опубликовано в [7]. Там же были предложены
аппроксимации сил и моментов трения на различных этапах движения шара. Целью
данной статьи является проведение численных расчетов движения шара в полной
постановке (т.е. путем численного суммирования возникающих плотностей сил в
пятне контакта) и с полученными аппроксимациями, а также сравнение фазовых
траекторий.
1.
Постановка задачи.
Рассматривается движение однородного шара радиуса a и массы m в однородном
поле силы тяжести по горизонтальной шероховатой плоскости Oxy, ось Oz направлена вертикально вверх. Пусть (xC , yC , zC ), (vx , vy , vz ) — радиус-вектор и скорость
центра шара в проекции на неподвижные оси Oxyz. Введем параметр θ0 , характеризующий глубину «погружения» тела в плоскость: zC = a cos θ0 .
Для вычисления плотности вертикальной силы, с которой каждая малая область
плоскости с вертикальной координатой z действует на помещенное на плоскость тело,
используется модель Кельвина-Фойгта:
−kz − ν ż, если − kz − ν ż > 0,
fz =
0, если − kz − ν ż 6 0,
Здесь k > 0 — коэффициент упругости, а ν > 0 — коэффициент вязкости. Если
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1758
плотность вертикальной силы оказывается отрицательной, то она полагается равной
нулю, т.е. плоскость выталкивает помещенное на нее тело, но не «прилипает» к нему.
Областью контакта S назовем ту часть шара, которая находится ниже опорной
плоскости. В ней введем сферические координаты — угол 0 < θ < θ0 отсчитывается от вертикали до радиус-вектора точки в S, выходящего из центра масс шара,
угол 0 < α < 2π отсчитывается от оси Ox до проекции радиуса-вектора точки на
горизонтальную плоскость. Предположим, что угол θ0 мал, тогда вертикальная сила, действующая на шар со стороны элемента площади dΣ = a2 sin θ dθdα области
контакта, равна fz dΣ, где
(1)
fz =
ka 2
(θ0 − θ2 ) + νθ(vx cos α + vy sin α) − νvz + O(θ3 vx , θ3 vy , θ4 ),
2
если fz > 0, и нулю, если fz < 0. В связи с этим естественно возникает понятие
пятна контакта I — это множество точек внутри области контакта S(θ0 ), для которых
плотность вертикальной силы fz неотрицательна:
(2)
I = {(θ, α) : fz > 0} ∩ S(θ0 ),
Введем безразмерные параметры. Пусть
r
a3/2 ν 3 g 1/2
mg
ε= 4
1,
κ
=
,
ka3
k2m
ε̂ = (εκ)1/3 1.
Будем рассматривать
в неподвижных осях Oxyz. Введем безp g движение шара
0
размерное время τ =
t, d/dτ = (·) . В качестве фазовых переменных выберем
a
следующие:
• безразмерная координата центра шара по вертикали ŝ = ε−2 θ02 /2 (тогда в положении равновесия на горизонтальной плоскости ŝ = ŝ∗ = π −1/2 ∼ 1);
• безразмeрная вертикальная скорость центра масс шара:
vz
û = − √
,
ag ε
• безразмерные горизонтальные компоненты скорости центра масс:
vx
vy
v̂x = √ , v̂y = √ ;
ag
ag
• безразмерные горизонтальные компоненты скорости наинизшей точки шара
(скорость проскальзывания):
vsx
vx − aωy
vsy
vy + aωx
v̂sx = √ = √
, v̂sy = √ = √
;
ag
ag
ag
ag
• безразмерная вертикальная компонента угловой скорости шара:
r
a
.
ω̂z = ωz
g
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1759
Введем общее обозначение для встречающихся здесь и далее безразмерных сил и
моментов:
F̂ = (mg)−1 F,
M̂ = (mga)−1 M,
и введем безразмерный момент инерции j = (ma2 )J −1 > 1 (тензор инерции шара
шаровой).
Динамические уравнения, описывающие движение шара, имеют вид:
(3)
ŝ0 = ε−1 û + O(ε),
(4)
û0 = ε−1 (1 − F̂z ),
(5)
v̂x0 = F̂x ,
0
(6)
v̂sx
= (1 + j)F̂x − j M̂y ,
v̂y0 = F̂y ,
(7)
0
= (1 + j)F̂y + j M̂x ,
v̂sy
(8)
ω̂z0 = j M̂z .
Здесь F̂z — вертикальная сила, с которой плоскость действует на шар, F̂ = F̂x ex +
F̂y ey — сила трения, M̂ = M̂x ex + M̂y ey + M̂z ez — момент трения.
(9)
2.
Основные предположения и методика
вычисления сил трения
Будем рассматривать движение шара при следующих предположениях
(i) Безразмерные параметры задачи ε 1, κ ∼ 1, при этом ε̂ = (εκ)1/3 1.
Механический смысл: глубина продавливания шаром плоскости в положении
равновесия
r
√
4 4
θ0 =
ε(1 + O( ε))
π
мала по сравнению с радиусом шара, вязкие свойства плоскости существенны.
(ii) В начальный момент выполнено
1 2 πŝ3
û +
− ŝ < −c,
2
3
где c — малая положительная постоянная. Механический смысл: начальное
вертикальное отклонение шара от положения равновесия и начальная вертикальная компонента скорости центра масс невелики (тем самым обеспечивается
отсутствие отрыва шара от плоскости все время движения).
(iii) v̂x |t=0 ∼ 1, v̂y |t=0 ∼ 1, ω̂z |t=0 ∼ 1 — начальная горизонтальная скорость центра
масс и угловая скорость шара не слишком велики и не слишком малы по величине. Не уменьшая общности, предположим, что в начальный момент ω̂z > 0.
(iv) В начальный момент скорость скольжения v̂sx |t=0 ∼ 1, v̂sy |t=0 ∼ 1 также имеет
не слишком большую и не слишком малую величину.
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1760
Силы и моменты F̂ , M̂ получаем интегрированием плотностей сил трения в
пятне контакта. В модели предполагается, что в каждом элементе площади dΣ пятна контакта действует сила трения, описываемая законом Кулона, с плотностью
−λnv̂ k /|v̂ k |, где n — плотность силы, направленной по нормали n к центру шара,
λ > 0 — коэффициент трения. Здесь v̂ k — безразмерная касательная к поверхности
шара скорость «пробной» точки шара в элементе dΣ. Плотность нормальной реакции n и плотность сил трения будем находить, используя равенство плотностей сил
в инфинитезимальной области пятна контакта:
(10)
v̂ k
fˆx ex + fˆy ey + fˆz ez = nn − λn k .
|v̂ |
Безразмерная плотность вертикальной силы связана с плотностью (1) соотношением:
√
fz = kaε2 ρ20 fˆz , где ρ0 = 2ŝ.
Для того, чтобы найти распределение плотностей горизонтальных сил fˆx , fˆy , необходимо выписать выражения для вектора нормали к поверхности шара n и распределения скоростей v̂ k с необходимой на требуемом этапе точностью.
3.
Этапы движения шара и аппроксимация сил и
моментов трения
В статье [7] показано, что движение шара можно разделить на четыре этапа.
Первый этап движения шара — это релаксация вертикальных колебаний. За время TI = O(εε̂−1 | ln ε̂|) происходит релаксация вертикальных колебаний центра масс
шара. После окончания этого этапа имеем
û = ε̂2 ũ(τ ),
ŝ = ŝ∗ + ε̂2 s̃(τ ),
где для некоторых постоянных cu , cs
|ũ(τ )| 6 cu , |s̃(τ )| 6 cs .
Во время второго этапа движения, который длится в течение промежутка времени
TII =
jv̂s0
+ O(ε̂2 ),
λ(1 + j)
шар движется по плоскости с проскальзыванием,
скорость которого приблизительно
p 2
2 |
линейно убывает до O(ε̂2 ) (здесь vs0 = v̂sx
+ v̂sy
t=0 ). Сила трения, действующая на
шар, с точностью до O(ε̂), представляет собой классическую силу трения Кулона.
Центр масс шара движется по параболе.
На третьем этапе движения скорость проскальзывания уменьшается, начиная с
величины порядка ε̂2 до величины порядка εε̂ за время TIII = O(εε̂−1 ). Скорость центра масс шара в течение этого времени остается порядка 1, за малое время TIII уменьшаясь на величину порядка O(ε̂2 ). Сила трения аналогична силе трения КонтенсуЭрисмана (см. [1, 2]).
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1761
В начале четвертого этапа движения скорость проскальзывания порядка O(εε̂).
В фазовом пространстве за время порядка O(ε log ε̂) происходит выход в окрестность
асимптотической траектории, на которой скорость проскальзывания в направлении
скорости центра масс порядка O(ε2 ) и пропорциональна величине скорости центра
масс, а в перпендикулярном направлении — порядка O(εε̂) и пропорциональна произведению скорости центра масс на угловую скорость верчения; далее изображающая
точка остается в окрестности этой траектории вплоть до остановки шара. На асимптотической траектории угловая скорость верчения за время порядка O(ε−1 ) убывает
почти линейно до величины порядка O(ε) и далее остается пропорциональна скорости центра масс с коэффициентом порядка O(ε). Скорость центра масс убывает
почти экспоненциально с показателем порядка O(εε̂) вплоть до остановки шара, поэтому длительность четвертого этапа TIV = O((εε̂)−1 log ε).
Основываясь на этом аналитическом разделении движения шара на этапы, предложим следующую аппроксимацию сил и моментов трения. Предположим для простоты, что требуется решить задачу о качении однородного шара по плоскости, и при
этом заранее известно, что шар не отрывается от плоскости. Поскольку длительности
первого и третьего этапа невелики, будем рассматривать только два случая.
1. Если скорость проскальзывания достаточно большая vs > ε̂ε, то сила трения
направлена вдоль скорости скольжения и равна по величине коэффициенту
трения:
F̂ = −λes ,
где es =
vs
,
|vs |
вертикальный момент трения
8λερ0
,
15
горизонтальные моменты равны нулю.
Mz = − sign ωz
2. Если скорость проскальзывания
мала vs > ε̂ε, то вводим следующие вспомогаp
тельные переменные: v̂ = v̂x2 + v̂y2 — скорость центра масс, векторы
v̂y
v̂y
v̂x
v̂x
ex + ey , e2 = − ex + ey ,
v̂
v̂
v̂
v̂
направленные соответственно вдоль и перпендикулярно скорости центра масс,
переменные
e1 =
(v̂s , e1 )
(v̂s , e2 )
, ν2 =
εε̂ωz
εε̂ωz
— нормированные на угловую скорость ωz скорости проскальзывания вдоль и
перпендикулярно скорости центра масс. Тогда компоненты F1 , F2 силы трения
вдоль и перпендикулярно скорости центра масс аппроксимируем следующими
формулами:
ν1 =
F̂ = F̂1 e1 + F̂2 e2 ,
πρ30
ρ0 v̂
F̂1 = −λ sign ω̂z ε̂
ν1 − 2ε
− εε̂v̂;
3
15ω̂z
F̂2 = −λ sign ω̂z ε̂
πρ30
3
(ν2 + v̂) .
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1762
Моменты трения имеют вид:
M = M1 e1 + M2 e2 + M3 e3 ,
M1 = 0, M2 = εε̂v̂,
ε̂2 15 2
1 2
1 2
0
sign
ω̂
1
−
v̂
+
ν
+
ν
.
M3 = − 8λερ
z
15
8
5 1
5 2
ρ2
0
Здесь использованы аппроксимации сил и моментов трения, полученные аналитически в статье [7], путем разложения поля скоростей проскальзывания в пятне контакта
и интегрирования получающихся плотностей сил по пятну контакта. Первый случай
соответствует второму этапу движению, эквивалентому движению с классической
силой трения Кулона с моментом верчения M3 , второй случай — четвертому этапу
движения. В обоих случаях величина вертикальной реакции плоскости F3 полагалась
равной весу шара.
4.
Численное интегрирование
Было проведено сравнение движения шара при использовании предложенных
аппроксимаций и при полном моделировании пятна контакта с возникающими в нем
силами сухого трения и вязко-упругих вертикальных реакций. В последнем случае
для вычисления сил и моментов трения проводилось суммирование плотностей сил
по пятну контакта. Пятно контакта (2) аппроксимировалось прямоугольной решеткой с шагом step = 0.05ε. Для каждой точки с номером (i, j) вычислялись ее декартовы координаты:
x = step * i ;
y = step * j ;
z = zC - sqrt (1 - x *x - y * y );
вертикальная скорость и величина плотности вязко-упругой силы, действующей со
стороны этой точки на шар:
zdot = vz -( vx * x + vy * y )/( zC - z );
fz = - k *z - nu * zdot ;
Если эта точка попадает в пятно контакта, то есть fz > 0, мы находим скорость
точки шара, находящейся в данный момент в этой точке пятна контакта:
vpx = vx + ( omegay *( z - zC ) - omegaz * y );
vpy = vy + ( omegaz * x - omegax *( z - zC ));
vpz = vz + ( omegax * y - omegay * x );
а также касательную состовялющую этой точки v k = v − (v, n)n (заметим, что в
данной точке пятна контакта n = −xex − yey − (z − zc )ez ):
vpx1 = vpx - ( - vx *x - vy *y - vz *( z - zC ))*( - x );
vpy1 = vpy - ( - vx *x - vy *y - vz *( z - zC ))*( - y );
vpz1 = vpz - ( - vx *x - vy *y - vz *( z - zC ))*( zC - z );
vpn1 = sqrt ( vpx1 * vpx1 + vpy1 * vpy1 + vpz1 * vpz1 );
Величина плотности нормальной реакции и горизонтальных составляющих сил, согласно (10), равна:
n = fz /( zC -z - lambda * vpz1 / vpn1 );
fx = - lambda * n * vpx1 / vpn1 + n * ( - x );
fy = - lambda * n * vpy1 / vpn1 + n * ( - y );
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1763
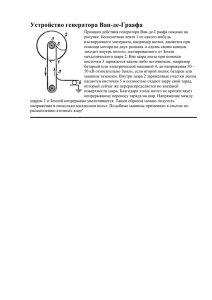
Рис. 1. Зависимости v̂x , v̂y , v̂sx , v̂sy , ω̂z ,
(xC , yC ).
от времени и траектория шара
Остается только просуммировать получившиеся плотности сил по пятну контакта
(step ∗ step — элемент площади):
FX += fx * step * step ; FY += fy * step * step ; FZ += fz * step * step ;
MX += y * fz * step * step ; MY += -x * fz * step * step ;
MZ += ( x * fy - y * fx )* step * step ;
Полученные таким образом силы и моменты использовались для интегрирования
системы уравнений (3)-(9) методом Рунге-Кутта 4 порядка с переменным шагом.
5.
Результаты
На рис. 1 изображены зависимости фазовых переменных v̂x , v̂y , v̂sx , v̂sy , ω̂z , от
времени, а также траектория шара (xC , yC ). Сплошной линией изображены результаты интегрирования при полном моделировании пятна контакта на вяко-упругой
плоскости (раздел 4.), а пунктирной — аппроксимации, описанные в разделе 3.. Параметры и начальные условия были выбраны следующие:
ε = 0.1, κ = 1, ε̂ = (κε)1/3 ≈ 0.46;
v̂x = 1, v̂y = −0.7, û = 0, v̂sx = 1, v̂sy = 0.3, ωz = 1;
q ẑC = cos(θ0 ) = cos ε 4 π4 .
Масса, радиус шара и ускорение свободного падения равны 1. Коэффициент трения λ = 0.2, инерционный параметр j = 2.5. Первый этап движения — релаксация
вертикальных колебаний — длится до t = 0.8. Окончание второго этапа наступает
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1764
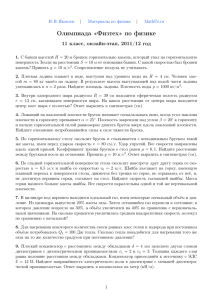
Рис. 2. Абсолютная ошибка приближенного решения.
при t = 1.6, третий этап достаточно короткий и его длительность трудно определить
по численным результатам. Четвертый этап — заключительный, на нем происходит
завершение верчения шара — при t = 40 угловая скорость верчения становится порядка 0.01 — и далее происходит почти экспоненциальное убывание скорости центра
масс v̂, значение v = 0.01 достигается в момент времени Tf in = 130.
На рис. 2 показана зависимость абсолютной ошибки от малого параметра ε при
значениях κ = 0.5; 1; 2 . Ошибка вычислялась по формуле:
2
2
εerror = max vx2 + vy2 + vsx
+ vsy
+ ωz2 .
t
Счет заканчивался при достижении ωz величины 0.01, что гарантировало окончание
содержательных этапов движения. Отсюда видно, что ошибка убывает с уменьшением κ и при ε → 0 ошибка имеет асимптотику ε0.4 , что соответствует результату
статьи [7].
6.
Заключение
Численные расчеты подтверждают адекватность предложенных в [7] аппроксимаций сил и моментов трения в задаче о движении однородного шара по плоскости.
Показано, что отличие движения, рассчитанного с применением аппроксимаций, от
движения, полученного при интегрировании плотностей сил по пятну контакта, имеет предсказанный порядок. При этом время расчета упрощенной модели значительно
меньше.
Работа выполнена при поддержке Российского фонда фундаментальных исследований (гранты №12-08-00591, №13-01-00230, №14-01-31467).
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г
1765
Список литературы
1.
2.
3.
4.
5.
6.
7.
Contensou P. Couplage entre frottement de glissement et frottement de pivotement dans la teorie
de la toupie // Kreiselsprobleme. Gyrodynamics. Symp. Celerina, 1962. Springer, 1963. (Контенсу П. Связь между трением скольжения и трением верчения и ее учет в теории волчка.
Проблемы гироскопии. М.: Мир, 1967. С. 60-77.)
Erismann Th. Theorie und Anwendungen des echten Kugelgetriebes // Z. Angew. Mat. Phys.
1954. Vol. 5, No. 5. P. 355-388.
Журавлев В.Ф. О модели сухого трения в задаче качения твердых тел // ПММ. 1998. Т.
62, № 5. С. 762-767.
Карапетян А.В. Двухпараметрическая модель трения и ее свойства // ПММ. 2009. Т. 73, №
4. С. 515-519.
Карапетян А.В. О моделировании сил трения в динамике шара на плоскости // ПММ. 2010.
Т. 75, № 4. С. 531-535.
Киреенков А.А. Связанные модели трения скольжения и качения // ДАН. 2008. Т. 419, №
6. 759-762.
Зобова А.А., Трещев Д. В. Шар на вязкоупругой плоскости // Современные проблемы
механики, Сборник статей. К 80-летию со дня рождения академика Андрея Геннадьевича
Куликовского. Тр. МИАН. М.: МАИК, 2013. Т. 281. С. 98–126.
XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ
ВСПУ-2014
Москва 16-19 июня 2014 г