На правах рукописи Федоренко Алексей Николаевич МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ПЕРЕОРИЕНТАЦИИ
advertisement

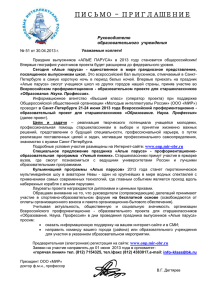
На правах рукописи Федоренко Алексей Николаевич МАТЕМАТИЧЕСКОЕ МОДЕЛИРОВАНИЕ ПЕРЕОРИЕНТАЦИИ ОРБИТАЛЬНОГО КОСМИЧЕСКОГО АППАРАТА СО СФЕРИЧЕСКИМ СОЛНЕЧНЫМ ПАРУСОМ Специальность 05.13.18 – Математическое моделирование, численные методы и комплексы программ (технические науки) АВТОРЕФЕРАТ диссертации на соискание ученой степени кандидата технических наук Москва - 2014 г. Работа выполнена в федеральном государственном автономном образовательном учреждении высшего профессионального образования «Национальный исследовательский университет «Высшая школа экономики» Научный руководитель: Чумаченко Евгений Николаевич, доктор технических наук, профессор, заведующий кафедрой механики и математического моделирования Национального исследовательского университета «Высшая школа экономики» Официальные оппоненты: Зуев Владимир Васильевич, доктор физико-математических наук, заведующий кафедрой прикладной математики и механики ФГБОУ ВПО «Московский государственный университет приборостроения и информатики» Щекутьев Александр Федорович, кандидат технических наук, ведущий научный сотрудник ФГУП Центральный научно-исследовательский институт машиностроения (ЦНИИмаш) Ведущая организация: ФГБОУ ВПО «Московский государственный университет имени М.В. Ломоносова» Защита состоится 18 сентября 2014 года в 14.00 на заседании диссертационного совета Д 212.048.09, созданного в «Национальном исследовательском университете «Высшая школа экономики», по адресу: 105187, г. Москва, ул. Кирпичная, д.33, ауд.503. С диссертацией можно ознакомиться в библиотеке Национального исследовательского университета «Высшая школа экономики» по адресу: 101000, Москва, ул. Мясницкая, д.20, и на сайте http://www.hse.ru/sci/diss/ Автореферат разослан « Ученый секретарь диссертационного совета, д. т. н., профессор » июля 2014г. Назаров Станислав Викторович 2 Общая характеристика работы Актуальность работы. Для современных проектов солнечных парусов особый интерес представляет использование поверхностей, отдельные участки которых в разных характеристиками. режимах Благодаря обладают разными можно регулировать этому отражающими давление на различные участки паруса, и появляется возможность управлять ориентацией космических аппаратов (КА). В мембрану первого плоского солнечного паруса Ikaros, запущенного в 2010 году, уже было встроено несколько вставок из жидкокристаллических пленок, которым можно было задавать прозрачное или непрозрачное состояние. Эти вставки образовывали систему вспомогательного управления ориентацией паруса, которая оправдала ожидания экспериментаторов. Многие проекты неплоских солнечных парусов имеют большую перспективу из-за удобства способа разворачивания мембраны и высокой управляемости. В диссертационной работе в качестве варианта паруса предложена оригинальная конструкция, состоящая из шести скрепленных между собой сферических парусов, разбитых на участки с изменяемыми отражающими свойствами. Форма сферы выбрана в связи с тем, что она хорошо подходит для раскрытия мембраны раздуванием. В литературе по тематике плоских солнечных парусов широко используется модель для силы, учитывающая два способа отражения света от поверхности плоского паруса, а также поглощение энергии с последующим переизлучением (C.R. McInnes). Эта модель была обобщена для паруса с произвольными формами поверхностей, задаваемых аналитически (L. RiosReyes, D. J. Scheeres). Рассматриваемый в диссертации солнечный парус из шести сфер с изменяемыми оптическими параметрами является примером, когда возникают несколько новых задач, связанных с определением и построением действующих на парус возмущений. Необходимо обеспечить возможность разбиения поверхности на большое число участков с переменными отражающими характеристиками, что предполагает оперативную 3 обработку возмущений от каждого участка для построения результирующего воздействия на КА. Также требуется отслеживать и прогнозировать затенение участков паруса другими частями конструкции в процессе переориентации КА. Объектом исследования диссертации являются солнечные паруса с переменными отражающими характеристиками, используемые для управления ориентацией КА. Предметом исследования является математическая модель предложенного солнечного паруса, построение которой требуется для определения результирующего вращающего возмущения и создания системы управления ориентацией КА. Цель работы заключалась в построении и исследовании математической модели предлагаемого солнечного паруса из шести сфер, которая бы учитывала его особенности и условия эксплуатации. Анализ результатов, полученных на основе модели, позволяет сделать оценку об эффективности этого паруса и целесообразности его применения. Научная новизна. Системы управления ориентацией объекта с использованием эффекта давления солнечного излучения применялись ранее в некоторых космических миссиях для стабилизации КА за счет воздействия светового давления на панели солнечных батарей или поверхности плоских солнечных парусов. Однако при этом многообразие возможных достижимых ориентаций (поворотов вокруг центра масс) не охватывало полностью множество всех необходимых положений ориентации (присутствовали “мертвые зоны”), либо для переориентации КА применялись другие дополнительные механизмы помимо солнечного паруса (двигательные установки ориентации, гиродины). В диссертации получены следующие новые результаты, развивающие идеи использования солнечных парусов для управления переориентацией КА: 1. Построена математическая модель солнечного паруса оригинальной конструкции с использованием поверхностей 4 сферической формы, обеспечивающего полную управляемость ориентацией КА исключительно за счет использования давления солнечного излучения при любом начальном направлении Объект-Солнце по отношению к системе координат, связанной с КА. 2. Построены количества и протестированы участков паруса в алгоритмы режимы переключения отражения, большого поглощения с переизлучением, или пропускания света для регулирования давления света на поверхность и создания вращающего момента. 3. Разработан комплекс программ, реализующий алгоритмы и численные методы, необходимые при моделировании движения объекта с солнечным парусом. Вычислительный модуль комплекса программ проводит построение вращательных воздействий на КА со стороны пикселей солнечного паруса, выполняет численное интегрирование уравнений движения объекта вокруг центра масс под воздействием вращательных моментов от паруса, оценивает размеры солнечного паруса, требуемого для конкретной миссии на орбите в зависимости от большого количества параметров (моментов инерции конструкции, оптических коэффициентов поверхности, высоты орбиты и т.д.). 4. Получены оценки: характерных размеров паруса в зависимости от ряда параметров миссии КА; времени, необходимого на переориентацию; точности построения ориентации; потребной памяти и производительности бортовой вычислительной системы, осуществляющей управление предлагаемым солнечным парусом. Научная и практическая ценность работы. Полученные в работе результаты подтверждают возможность осуществления проекта с рассматриваемой конструкцией паруса, дают обоснование его перспективности. Разработанный программный комплекс имитационного моделирования движения КА вокруг центра масс под действием солнечного паруса пригоден для прогнозирования движения, анализа поведения и управления движением 5 перспективных реальных КА, в первую очередь, научного и народнохозяйственного назначения. Получили внедрение и используются в «НПО им. С.А. Лавочкина» следующие результаты диссертационной работы: Разработанная математическая модель солнечного паруса с переменными отражающими характеристиками; Разработанные алгоритмы переключения пикселей для стабилизации объекта вокруг центра масс. Апробация диссертации. Результаты диссертации докладывались автором на следующих конференциях: VIII Конференция молодых ученых, посвященная Дню космонавтики и 50-летию полета Юрия Гагарина (Москва, 2011), Всероссийская научно-техническая конференция и школа молодых ученых, аспирантов и студентов "Авиакосмические технологии" (Воронеж, 2011 - Москва, 2012), ежегодная Научно-техническая конференция студентов, аспирантов и молодых ученых МИЭМ (2011-2014), IX Конференция молодых ученых, посвященная Дню космонавтики (Москва, 2012), 2-я международная научно-практическая конференция “Инновационные информационные технологии” (Прага, 2013), Международная конференция “International Astronautical Congress” (Пекин, 2013). Результаты работы обсуждались на семинарах кафедры Механики и математического моделирования НИУ ВШЭ под руководством профессора Чумаченко Е.Н. Публикации. По теме диссертации опубликовано 10 печатных работ. Среди них 4 печатных работы, опубликованные в журналах, включенных в Перечень ведущих рецензируемых научных журналов и изданий ВАК [1–4]. Структура и объем диссертации. Работа состоит из введения, обзора литературы, 4 глав, основных выводов, списка источников литературы и приложения. Общий объем диссертации 123 страницы, 59 иллюстраций, 4 таблицы и список литературы из 46 наименований. 6 Содержание работы В обзоре литературы раскрывается вопрос актуальности исследования. Кратко описаны уже осуществленные проекты с использованием солнечного давления и непосредственно солнечных парусов. Даны предварительные оценки эффективности парусов в перспективных космических миссиях. В первой главе диссертации приведены распространенные модели для определения действующей на солнечный парус силы. Для достаточно большого расстояния r до Солнца r RS давление определяется по формуле Pr I 0 RS 2 , c r (1) где RS радиус солнца, c скорость света, I 0 удельная интенсивность солнечного излучения. Давление света на орбите Земли приблизительно составляет 4,6 106 Н м2 . В простейшем предположении о полном зеркальном отражении всех падающих на плоский парус фотонов выражение для результирующей силы принимает вид f 2PAu n 2 n , (2) где A площадь паруса, n n1, n2 , n3 T вектор нормали к поверхности, который составляет угол с вектором направления падающего света u . Более строгая гипотеза предполагает зеркальное отражение, отражение рассеиванием и поглощение с последующим переизлучением (C.R. McInnes, 1999). В этом случае f 2PAcos b1u b2 cos b3 n , где b1 (3) B B 1 1 1 s , b2 s , b3 B f 1 s 1 f f b b , – общий 2 f b 2 коэффициент отражения, s – коэффициент зеркального отражения, f и b 7 коэффициенты излучения передней и обратной сторон паруса соответственно, коэффициенты и Bf Bb характеризуют распределение отраженных рассеиванием фотонов передней и обратной сторон паруса в зависимости от направления. Обобщение формулы для вычисления результирующей силы, действующей на произвольную поверхность, заключается в интегрировании силы по элементу площади dA . Для определения результирующей силы на всю поверхность необходимо провести серию вычислений интегралов, являющихся компонентами тензоров рангом от одного до трех (L. Rios-Reyes, D. J. Scheeres, 2004): Ti 1 1 1 ni n j dA , Tijk ni dA , Tij ni n j nk dA i, j , k 1, 2, 3 A A A A A A (4) Вектор действующей силы в записи по компонентам принимает вид f j PA 2b2uiTijkuk b2 1uiTi jk uk 2b1T jk uk , где использование одинаковых индексов в произведении (5) означает 1, j k суммирование по ним, и введен символ Кронекера jk . 0, j k Если элемент поверхности dA имеет радиус-вектор d d1, d2 , d3 T относительно некоторой точки, то вращающий момент относительно этой точки рассчитывается по формуле dM d dF , где использовано обозначение 0 d dij d3 d 2 d3 0 d1 d2 d1 0 В записи по компонентам вращающий момент примет форму M j P R jk uk ui Rijkuk , 8 (6) где b2 2dil nl n j nk dil nl jk dil nl jk dA . A A R jk 2b3d jl nl nk dA , Rijk Очевидно, приведенные формулы предполагают отсутствие затенения на площадях паруса, для которых рассчитывается сила и момент. В математической модели солнечного паруса из шести скрепленных штангами одинаковых сфер (Рисунок 1), построенной во второй главе, это ограничение отсутствует. Для этого каждый из шаров разбит на большое число элементарных участков (пикселей) с изменяемыми оптическими параметрами, что позволяет отслеживать затененные области и управлять ориентацией КА. Рисунок 1. Конструкция солнечного паруса и ориентация на орбите Пиксели могут быть в двух состояниях: активном или неактивном. Пиксели, преимущественно поглощающие или пропускающие солнечный свет, будем называть неактивными, а отражающие подавляющую часть света – активными. Идеальным вариантом является поверхность, которая в активном состоянии полностью отражает свет, а в неактивном становится прозрачной. На активные участки паруса будет действовать сила, значительно превышающая силу, действующую на неактивные участки. Благодаря этой разнице, управляя состоянием каждого пикселя, можно получить вращающий момент для 9 поворота конструкции. Поверхность сферы может быть аппроксимирована N квадратами со стороной d с зазорами в зависимости радиуса. При этом силу на пиксель можно вычислять, следуя формулам (2) или (3) для плоского паруса, прикладывая ее в центр пикселя для вычисления момента. Рассматривается так же вариант разбиения поверхности сферы на сегменты семействами параллелей и меридиан. В этом случае для расчета силы и момента применяются формулы (4-6). Центр масс всей конструкции из тела аппарата и паруса расположен в точке пересечения штанг. Будем считать, что давление света с каждой сферы передается в ее центр, где она скреплена с концом своей штанги. Задача состоит в том, чтобы создавать конфигурации активных и неактивных пикселей таким образом, чтобы осуществить маневр по переводу КА в заданную ориентацию. Начиная приблизительно с высоты 1000км считается, что определяющие возмущения создаются гравитацией и солнечным давлением. Для перехода от связанной с конструкцией системы координат к орбитальной используется оператор A Aij от компонент кватерниона q̂ : 2(q02 q12 ) 1 2(q1q2 q0 q3 ) 2(q1q3 q0 q2 ) A 2(q1q2 q0 q3 ) 2(q02 q22 ) 1 2(q2 q3 q0 q1 ) 2(q q q q ) 2(q q q q ) 2(q 2 q 2 ) 1 2 3 0 1 0 3 1 3 0 2 (7) Изменение ориентации конструкции с главными моментами инерции J1 , J 2 , J 3 описывается системой дифференциальных уравнений Эйлера J1 d1 ( J 3 J 2 )23 u1 M G1 d1 dt J2 d2 ( J1 J 3 )13 u2 M G 2 d 2 dt J3 d3 ( J 2 J1 )12 u3 M G 3 d3 dt 10 (8) 0 q1 q 2 1 z q3 2 y q0 x z y 0 x x y 0 z x q1 y q2 z q3 (9) 0 q0 M G1 J 2 J 3 A23 A33 3 M G M G 2 3 J1 J 3 A13 A33 R 0 M G 3 J1 J 2 A23 A13 (10) где угловая скорость в связанной с телом системе координат, u суммарный управляющий вращающий момент от пикселей паруса, M G вращающий момент от гравитации, 3,9861014 м3 / c2 гравитационный параметр Земли, R0 высота орбиты от центра Земли, d момент вследствие остальных возможных внешних возмущений. Для численного решения применяется метод Рунге-Кутта четвертого порядка точности. Для создания вращающего воздействия на парус построены алгоритмы переключения пикселей. Множество доступных управляющих моментов U состоит из сумм конфигураций затрачиваемого моментов активных на и маневр от каждого неактивных времени пикселя для всевозможных пикселей. Для минимизации требовался алгоритм создания максимального по модулю вращающего момента вокруг требуемой оси. Так как множество U содержит конечное количество элементов, эта задача была переформулирована как создание максимального по модулю момента, отклоняющегося от направляющего вектора оси в пределах заданного угла. Чтобы определить незатененные области поверхности паруса, вычисляются и анализируются координаты перпендикулярную проекций направлению вершин света. пикселей Проверка на плоскость, всех возможных конфигураций активных и неактивных пикселей на незатененных областях для выбора наиболее подходящей была невозможна в силу очень большого 11 количества вариантов. Поэтому был реализован “жадный” алгоритм. Его смысл заключается в построении некоторого начального приближения, которое затем оптимизируется путем циклического перебора всех освещенных пикселей. На каждом шаге цикла принимается локально оптимальное решение о том, активировать ли данный пиксель, или оставить его неактивным. Аналогичным образом было реализовано построение приближения к произвольному целевому управлению u . Если u превосходит по модулю доступные в U управления, то результатом работы этого алгоритма становится приближение M R u , 0 1 . Между векторами M R и u образуется некоторый угол погрешности, который может оказаться неприемлемо большим, если u существенно выйдет за пределы ресурсов U . Задача осложняется тем, что U зависит от ориентации КА, так как части паруса могут попадать в тень других частей конструкции. Поэтому для оценки доступных ресурсов U выполняется алгоритм создания максимального вращающего момента. Полученные ограничения на u используются для стабилизации КА в главе 4. В третьей главе было проведено тестирование алгоритмов на многочисленных примерах с использованием модели идеального, и неидеального отражения света с различными наборами оптических параметров. На языке С++ был разработан комплекс программ для реализации всех алгоритмов, приводимых в диссертации. В этом комплексе могут быть выделены следующие подсистемы: вычислительный модуль, графический клиент, клиент экспорта и импорта данных. Вычислительный модуль включает в себя подмодуль для определения необходимых геометрических параметров паруса и подмодуль для моделирования изменения ориентации КА под действием солнечного давления. Подмодуль для определения необходимых геометрических параметров находит критические ориентации, в которых комбинация гравитационного момента и затенения создает наихудшую в смысле управляемости ситуацию. Он так же позволяет автоматически подбирать необходимые размеры паруса в зависимости от большого количества 12 параметров задачи: моментов инерции КА, оптических свойств поверхности, высоты орбиты. На основе значений вращающего момента, который можно создать пикселями паруса, а так же затрачиваемого времени на тот или иной маневр, можно оценить, достаточны ли размеры паруса для конкретной миссии. Подмодуль для имитационного моделирования переориентации КА выполняет вычисления по схеме, представленной на Рисунке 2. Разбиение сферы на пиксели производится один раз в начале маневра, а координаты нормалей к поверхности пересчитываются в соответствии с текущей ориентацией. В графическом модуле (Рисунок 3) отображается изменение ориентации КА во времени, проводится схематическое рисование шаров паруса со штангами, направляющего вектора для момента, активных и неактивных пикселей на шарах. Это позволяет визуально проверить согласованность конфигурации активных и неактивных пикселей с направлением результирующего момента, что повышает надежность результатов. Рисунок 2. Схема выполнения задач вычислительного модуля для моделирования переориентации КА 13 Рисунок 3. Графическое отображение активности пикселей и ориентации КА Количество пикселей разбиения и требования на точность отклонения построенного момента от целевого направления параметрами, определяющими пикселей. Время подбора время подбора конфигурации являются основными конфигурации несколько активных варьируется и в зависимости от совокупности следующих параметров: текущей ориентации, оси вращения, соотношения между воздействием гравитации и солнечным излучением. Для получения характерных значений времени в зависимости от числа пикселей проводились тестовые маневры вокруг главных осей аппарата с целью оценить максимальное и среднее время на построение конфигурации пикселей. Рассматривался парус с квадратными пикселями со штангами длиной 5м и шарами радиусом 1м. Допуск на точность отклонения результирующего момента принят равным 0,25°. Тестовые вычисления проводились на процессоре Intel Core i7-3630QM 2.4GHz без распараллеливания. В таблице 1 показано максимальное время, а так же среднее время на обработку пикселей по ходу маневра. В данном тесте при количестве пикселей разбиения, превышающем 300000, подбор конфигурации ведется более 20 секунд. Подобное запаздывание между началом построения целевого управления пикселями и его реализацией даже с учетом малой величины угловой скорости 14 может привести к невозможности управлять парусом в режиме реального времени. Запаздывание может быть уменьшено путем снижения требований точность маневра. Система в целом способна оперировать приблизительно 1000000 пикселей. Таблица 1 Количество пикселей 6744 28842 184896 >300000 Среднее время обработки, мс 56 265 1735 >20000 Максимальное время, мс 63 328 2280 >20000 Была проведена оценка эффективности паруса с квадратными пикселями со стороной d. Она определяется следующими параметрами, которые и необходимо выбрать при проектировании паруса для конкретной миссии: 1) Размер пикселя d 2) Длина штанг L 3) Радиус шаров R В работе приводятся несколько примеров полученных на основе модели характерных значений вращающего момента и повышения его величины изменением этих параметров. В случае затенения одних частей паруса другими может возникнуть падение величины вращающего момента. Для вариантов КА из таблицы 2 рассчитаны требуемые длины штанг и радиусы шаров с тем критерием, чтобы в любой ориентации можно было создать вращающий момент в произвольном направлении в предположении модели идеального отражения. Результаты этих оценок показаны на рисунках 4–6. Таблица 2 вариант № 1 2 3 J1, кг×м2 650 102 600 J2, кг×м2 675 105 675 15 J3, кг×м2 675 110 675 d, м 0,05 0,02 0,05 L, м 5 меняется 5 1 0.9 0.8 Радиус шара, м 0.7 0.6 0.5 0.4 0.3 0.2 0.1 0 0 5000 10000 15000 20000 25000 30000 Высота орбиты, км Рисунок 4. Радиус шара солнечного паруса в зависимости от высоты орбиты. Вариант паруса №1 из таблицы 1 0.7 3.5 Радиус шара R 0.6 3 0.5 2.5 0.4 2 0.3 1.5 0.2 1 0.1 0.5 0 длина штанги L, м радиус шара R, м Длина штанги L 0 0 5000 10000 15000 20000 25000 30000 Высота орбиты, км Рисунок 5. Радиус шара и длина штанг солнечного паруса в зависимости от высоты орбиты. Вариант паруса №2 из таблицы 1 1.6 1.4 Радиус шара, м 1.2 1 0.8 0.6 0.4 0.2 0 0 5000 10000 15000 20000 25000 30000 Высота орбиты, км Рисунок 6. Радиус шара солнечного паруса в зависимости от высоты орбиты. Вариант паруса №3 из таблицы 1 16 В четвертой главе описывается используемый алгоритм стабилизации КА с использованием метода скользящих режимов, который был включен в комплекс программ для имитации маневров паруса. Этот метод позволяет осуществлять маневры даже при наличии возможных неточностей в принимаемой модели паруса, неучтенных возмущений, ошибках в моментах инерции, т.е. обладает робастностью. Общая идея не принадлежит лично автору диссертации. Но в работе предложен принцип оптимального подбора неизвестных параметров для минимизации затрачиваемого времени на маневр переориентации паруса при использовании данного метода. Осуществляется переход к параметрам i qi , i 1, 2, 3 , которые 1 q0 позволяют описывать вращения в пределах 360°. Равносильной системе уравнений (8) и (9) будет система d J J u d dt d G , dt (11) (12) где использованы обозначения 1 0 0 1 T T (13) G 1 E3 2 2 , E3 0 1 0 4 0 0 1 Гравитационный момент M G отнесем к суммарным внешним возмущениям d . Поверхность скольжения ищется в виде s k 0 1 T Производная s по времени имеет вид ds d J J JM J u d JM , dt dt 17 (14) (15) где M k T T 1 E3 2 . 4 1 Управление состоит из двух слагаемых u uэкв uп , uэкв J JM , uп 1s 2 sgn(s ) , (16) 0 0 11 0 21 0 где 1 0 12 0 и 2 0 22 0 – диагональные матрицы с 0 0 0 13 0 23 1, si 0, положительными компонентами, sgn(si ) 0, si 0 . 1, si 0. 1 Применение u из формулы (16) к функции Ляпунова в форме V s s T Js с 2 условием ограниченности d обеспечивает выполнение V s 0 . Согласно принципу Лассаля, траектория системы (11–12) с управлением (16) попадет на поверхность скольжения за конечное время и не сможет ее покинуть. При этом после попадания на поверхность скольжения имеет место lim 0 t и lim 0 , что и означает стабилизацию КА. t Следуя представленному методу, маневр состоит из двух частей. Первая часть заключается в переводе траектории на поверхность s 0 , а вторая в движении вдоль этой поверхности к точкам 0 и 0 . Представим начальную ориентацию как поворот на угол вокруг оси m m1, m2 , m3 c i mitg . На коэффициенты 1 и 2 для управления 4 предлагается наложить условия для равномерного движения к s 0 по всем координатам: 1i 0 , 2i mi J i для i, j 1, 2, 3 2 j m j J j 18 (17) Для минимизации времени на маневр, параметры 2i выбираются таким образом, чтобы максимально задействовать ресурсы управления, доступные в каждый момент времени. При достижении поверхности скольжения, управление u uэкв uп скачком теряет составляющую uп . Следуя методу, после этого необходимо использовать управление u uэкв . Если ресурсов управления в этот момент времени окажется недостаточно, с формальной точки зрения предлагаемый метод будет нарушен. Поэтому необходимо так же отыскать оптимальный параметр k для поверхности скольжения. Для этого в каждый момент времени маневра вычисляется 1 t T t i t k t min , i 1, 2, 3 i t i (18) и соответствующее ему uэкв t . Когда uэкв t близко границе допустимых ресурсами управлений U , по формуле (18) определяется соответствующий текущему времени коэффициент k , и при этом по крайней мере одно из si 0 . Затем к нулю будут приведены остальные компоненты s . Были учтены следующие особенности, которые могут привести к нарушению необходимых условий работы метода, или снижению его эффективности по минимизации времени: 1. Выход системы в более эффективное состояние в дальнейшее время маневра после выбора k. Это означает существование оптимальной поверхности скольжения в более поздний момент времени. 2. Выход uэкв t в дальнейшее время маневра из допустимого ресурсами множества управлений U , вызванное переходом в ориентацию с большой долей затененных пикселей. В этом рассматриваемый метод. 19 случае может быть нарушен 3. Кроме того, при наличии внешних возмущений или неопределенностей необходимо оставить ресурс для удержания движения вдоль s 0 . Исходя из оценки Li 0 для максимально возможного модуля этих внешних возмущений по каждой компоненте, в режиме скольжения должно выполняться 2i Li . Поэтому чтобы оставить запас, компоненты uэкв t следует выбирать не при достижении границы U , а при достижении определенной ее окрестности. Для того чтобы обойти описанные ситуации, алгоритмом предусмотрены пробные маневры. В работе рассмотрено несколько примеров стабилизации КА по описанному методу. В одном из них на вход алгоритму подаются моменты инерции с ошибкой в 1% от реальных, и помимо гравитационного момента присутствуют неизвестные внешние возмущения. Подаваемые на вход алгоритму моменты инерции равны J1 650кг м 2 , J 2 J 3 675кг м 2 , в то время как истинные (используемые при решении ОДУ) моменты инерции J1 , J 2 и J 3 имеют вид J1 0,99 J1 , J 2 1,01J 2 , J 3 0,99 J 3 Внешние условно неизвестные вращающие воздействия описываются формулой 2 2 cost / 60 d1 t 1 sin t / 60 10 6 Н м 3 3 cost / 60 На Рис. 7-8 показаны результаты численного моделирования маневра. Пикселями паруса реализовывался вращающий момент, обеспечивающий достижение поверхности скольжения за минимальное время. Стремление параметров и к нулевому значению означает стабилизацию КА. 20 0.5 Компоненты ω, [рад/c]×10-4 0.0 -0.5 Series1 1 2 Series2 -1.0 Series3 3 -1.5 -2.0 -2.5 -3.0 -3.5 0 1000 2000 3000 4000 5000 6000 7000 8000 t, [c] Рисунок 7. Изменение компонент угловой скорости в процессе поворота 0.5 1 Series1 2 Series2 0.4 Series3 3 Компоненты σ 0.3 0.2 0.1 0 0 1000 2000 -0.1 3000 4000 5000 6000 7000 8000 t, [c] Рисунок 8. Изменение компонент σ в процессе поворота Основные результаты и выводы: 1. Построена математическая модель конструкции сферического солнечного паруса на орбите Земли, предполагающая разбиение паруса на большое количество участков (до одного миллиона), и учитывающая возможные перекрытия участков поверхности паруса от света. 2. Для быстрого построения требуемого вращающего воздействия из большого количества пикселей был разработан алгоритм с применением логики “жадного” алгоритма. Он обеспечил достаточную скорость 21 обработки возмущений от пикселей, чтобы управлять парусом в режиме реального времени. 3. На основе математической модели был разработан комплекс программ для имитации движения модели конструкции и оценивания ее эффективности. 4. Разработанная имитационная система способна в зависимости от множества параметров необходимые задачи геометрические и требований параметры к паруса, КА определить обеспечивающие выполнение установленной миссии. 5. В имитационную систему был включен и протестирован алгоритм стабилизации КА, оптимизированный с точки зрения минимизации времени для использованного метода стабилизации, и позволяющий оценить эффективность по быстродействию предложенной конструкции паруса. Список публикаций Работы, опубликованные в рецензируемых журналах, рекомендованных ВАК Министерства образования и науки РФ: 1. Федоренко А. Н. О задаче моделирования и управления шарообразными космическими парусами // Вестник Тамбовского государственного технического университета. 2011. – Т.17. – № 4. – С. 1044-1052. – 0.6 а.л. (в соавт. с Чумаченко Е. Н., Данхэмом Д. У., Назировым Р. Р., Кулагиным В. П., Малашкиным А. В., Эйсмонтом Н. А.), личный вклад автора 0.16 а.л. 2. Федоренко А.Н. Моделирование использования солнечного ветра для орбитальных маневров космических аппаратов // Вестник Воронежского государственного технического университета. 2011. – Т.7. – №11.2 – C.71-75. – 0.4 а.л. (в соавт. с Чумаченко Е.Н., Малашкиным А.В.), личный вклад автора 0.15 а.л. 22 3. Федоренко А. Н. Управление группировкой космических аппаратов в окрестности Солнечно-Земных коллинеарных точек либрации с помощью солнечного паруса // Вестник машиностроения. 2013. – № 2. – С. 43-46. – 0.4 а.л. (в соавт. с. Назировым Р. Р. , Эйсмонтом Н. А.,Чумаченко Е. Н., Данхэмом, Д. У., Логашиной И. В.), личный вклад автора 0.05 а.л. 4. Федоренко А. Н. Управление космическими аппаратами с помощью солнечного излучения // Космические исследования. 2014. ‒ Т. 52 .‒ №3. –С. 257-263. ‒ 0.6 а.л. (в соавт. с Чумаченко Е. Н., Назировым Р. Р., Данхэм Д. У.), личный вклад автора 0.3 а.л. Другие работы, опубликованные автором по теме диссертации: 5. Федоренко А.Н. Моделирование и управление шарообразными солнечными парусами // Труды XII Всероссийской научно-технической конференции и школы молодых ученых, аспирантов и студентов “Авиакосмические технологии” (АКТ-2011). Воронеж, 2011. С. 105-106. 0.07 а.л. 6. Федоренко А.Н. Управление космическим аппаратом с помощью солнечного паруса // VIII конференция молодых ученых, посвященная Дню космонавтики. Тезисы докладов. Сборник фундаментальные и прикладные космические исследования. М.: ИКИ РАН, 2011. С. 78. 0.07 а.л. 7. Федоренко А.Н. Моделирование вращения спутника на орбите земли с использованием солнечного паруса // Тезисы докладов. IX конференция молодых ученых, посвященная Дню космонавтики. Сборник фундаментальные и прикладные космические исследования. М.: ИКИ РАН, 2012. С. 83-84. 0.07 а.л. (в соавт. с Малашкиным А.В.), личный вклад автора 0.04 а.л. 23 8. Федоренко А.Н. Автоматизация оценки геометрических параметров сферического солнечного паруса, необходимого для маневров КА в гравитационном поле // Тезисы XIV Всероссийской научно-технической конференции и школы молодых ученых, аспирантов и студентов “Авиакосмические технологии” (АКТ-2013). Москва, 2013. С. 73-74. 0.15 а.л. 9. Федоренко А.Н. Управление ориентацией космического аппарата со сферическими солнечными парусами // Материалы 2-й международной научно-практической конференции “Инновационные информационные технологии”, Том 2. Прага, 2013. С. 415-420. 0.4 а.л. (в соавт. с Чумаченко Е.Н., Данхэмом Д.У.), личный вклад автора 0.13 а.л. 10. Fedorenko A. N. Design of spherical solar sails for spacecraft attitude maneuvers.// Материалы Международной конференции “International Astronautical Congress”. Пекин, 2013. IAC-13,C1,1,8x16837, 8 стр. 0.6 а.л. (в соавт. с Chumachenko E. N., Dunham D. W., Eismont N. A.), личный вклад автора 0.4 а.л. Лицензия ЛР № 020832 от «15» октября 1993 г. Подписано в печать «__» __________ _____ г. Формат 60х84/16 Бумага офсетная. Печать офсетная. Усл. печ. л. 1. Тираж 100 экз. Заказ №___ Типография издательства НИУ ВШЭ, 125319, г. Москва, Кочновский пр-д., д. 3. 24