СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ
advertisement

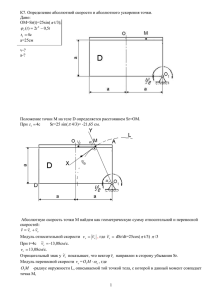
Федеральное агентство по образованию Томский государственный архитектурно - строительный университет СЛОЖНОЕ ДВИЖЕНИЕ ТОЧКИ Методические указания Составитель Н.А. Еньшина Томск – 2005 Сложное движение точки: Методические указания. / Сост. Еньшина Н.А. – Томск: Изд-во Томского государственного архитектурно-строительного университета, 2005. – 32 с. Рецензент доцент О.Н. Попов Редактор Т.С. Володина В методических указаниях содержится краткий обзор теории сложного движения точки со ссылками на литературу, список рекомендуемой литературы, указания по решению задач, примеры решения задач. Методические указания предназначены для самостоятельной работы студентов всех специальностей дневной формы обучения, а также для преподавателей в организации практических занятий по кинематике сложного движения точки. Печатается по решению методического семинара кафедры теоретической механики № 7 от 3.03.2005 г. Утверждены и введены в действие проректором по учебной работе В.С. Плевковым с 05.09.2005 до 05.09.2010 Изд. лиц. № 021253 от 31.10.97. Подписано в печать Формат 60x90/16. Бумага офсет. Гарнитура Таймс, печать офсет. Уч.- изд.л. Тираж 1000 экз. Заказ № Изд-во ТГАСУ, 634003, г. Томск, пл. Соляная, 2 Отпечатано с оригинал-макета в ООП ТГАСУ 634003, г. Томск, ул. Партизанская, 15 СОДЕРЖАНИЕ Введение.................................................................................... 4 1. Методические указания к заданию К-3 1.1. Объём задания................................................................ 5 1.2. Требования, предъявляемые к оформлению курсовой работы К-3..................................................... 5 1.3. Некоторые вопросы теории........................................... 6 1.4. План решения задач....................................................... 9 2. Примеры выполнения задания 2.1. Пример 1 ......................................................................... 10 2.2. Пример 2 ......................................................................... 13 2.3. Пример 3 ......................................................................... 19 3. Кинематический анализ кулисного механизма .................. 24 3.1. Пример 4 ......................................................................... 24 4. Вопросы для самоконтроля.................................................. 31 Библиографический список ................................................. 32 3 ВВЕДЕНИЕ Основные законы классической механики (законы Ньютона) и все полученные на их основе уравнения справедливы только для движения материальной точки (тела) по отношению к инерциальной системе отсчёта. Напомним, что инерциальной называется такая система отсчёта, в которой справедлив закон инерции Ньютона. Во многих случаях задачи механики сводятся к исследованию движения тел в неинерциальной системе отсчёта. В сущности, неинерциальной является и привычная для нас система отсчёта, связанная с Землёй, причём неинерциальность геоцентрической системы отсчёта можно обнаружить на некоторых тонких опытах (например, отклонение падающих тел к Востоку, вращение плоскости качания маятника и др.). В большинстве же задач систему координат, жёстко связанную с Землёй, можно считать инерциальной системой отсчёта. Если же связать систему координат с кораблём, автомобилем или самолётом, движущимися по криволинейным путям, или тем более с ротором быстроходной турбины, то неинерциальность окажется столь значительной, что основное уравнение динамики окажется неверным. Задача изучения движения материальной точки в неинерциальных системах отсчёта связана с чисто кинематической задачей: по заданному относительному движению точки и при известном движении подвижной системы координат определить абсолютную скорость и абсолютное ускорение точки. 4 1. МЕТОДИЧЕСКИЕ УКАЗАНИЯ К ЗАДАНИЮ К-3 1.1. Объём задания Задание К-3 состоит из 30 вариантов. В каждом варианте по 2 задачи и каждая имеет шесть различных числовых данных (подвариантов). Подвариант обычно соответствует номеру группы. В обеих задачах требуется: а) разложить сложное движение точки М на составляющие, определив абсолютное, относительное и переносное движения; б) вычислить относительную, переносную и абсолютную скорости точки М для данного момента времени t = t1 и нанести на чертёж соответствующие векторы скоростей; в) вычислить относительное, переносное, кориолисово и абсолютное ускорения точки М для момента времени t = t1 и расставить на чертеже соответствующие векторы ускорений. 1. 2. Требования, предъявляемые к оформлению курсовой работы К-3 Курсовая работа выполняется на стандартных листах формата А4 (210297 мм). Записка должна включать: титульный лист, лист задания, основной текст. Оформление титульного листа выполняется в соответствии с требованиями ГОСТа. Текст писать чернилами или пастой на одной стороне листов, при этом оставлять поля: слева для подшивки 20 мм, с трёх других сторон по 5 мм. При выполнении задания необходимо записать полностью условия каждой задачи и сделать относящийся к задаче чертёж. Решение задач излагается с письменным пояснением выполняемых действий. Чертежи выполняются в карандаше, используя циркуль и линейку. Чертёж должен быть аккуратным и наглядным, а его размеры должны позволять ясно показать векторы скоростей и ускорений. 5 1.3. Некоторые вопросы теории Движение точки по отношению к системе отсчёта, принимаемой за неподвижную, называется абсолютным движением. В ряде случаев абсолютное движение точки удобно рассматривать как сложное, состоящее из двух движений: движения точки по отношению к некоторой подвижной системе отсчёта и движения точки вместе с подвижной системой отсчёта по отношению к неподвижной [1]. М О Vo Рис.1 Например, движение какой-либо точки М колеса паровоза, совершающееся по отношению к Земле по циклоиде (рис.1), можно считать состоящим из двух простых движений: движения точки по окружности по отношению к корпусу паровоза и движения этой точки вместе с поступательно движущимся корпусом паровоза. Движение точки по отношению к подвижной системе отсчёта называется относительным движением. Движение подвижной системы отсчёта по отношению к неподвижной системе отсчёта называется переносным движением. Следовательно, в приведённом выше примере круговое движение точки М по отношению к корпусу паровоза есть, очевидно, относительное движение, поступательное движение корпуса паровоза – переносное движение, и движение точки М по циклоиде по отношению к Земле – абсолютное движение. При этом надо помнить, что термины «неподвижная» и «подвижная» системы отсчёта имеют условное значение. Абсолютной скоростью V a и абсолютным ускорением aa данной точки называются её скорость и ускорение по отношению к неподвижной системе отсчёта. 6 Относительной скоростью Vr и относительным ускорением a r точки называются её скорость и ускорение по отношению к подвижной системе отсчёта. Поскольку переносное движение может быть и непоступательным, то переносные скорость и ускорение точки будут зависеть от того, какое положение эта точка занимает в данный момент по отношению к подвижной системе отсчёта. Следовательно, переносной скоростью Ve и переносным ускорением a e называются скорость и ускорение относительно неподвижной системы отсчёта той точки, неизменно связанной с подвижной системой отсчёта, с которой совпадает в данный момент движущаяся точка. Основная задача изучения сложного движения точки состоит в установлении зависимости между скоростями и ускорениями относительного, переносного и абсолютного движения точки. Зависимость между абсолютной, относительной и переносной скоростями точки, совершающей сложное (составное) движение, определяется теоремой сложения скоростей [1]. Абсолютная скорость точки равна геометрической сумме её переносной и относительной скоростей Va Ve Vr . (1.1) Очевидно, модуль абсолютной скорости точки определяется по формуле: 2 e 2 r Va V V 2VeVr cos(Ve , Vr ) . (1.2) Направление вектора Va можно найти через направляющие косинусы. При применении метода проекций надлежит выбрать оси координат и спроецировать равенство (1.1) на эти оси. Тогда зависимость между проекциями абсолютной, относительной и переносной скоростей определяются формулами: (1.3) Vax Vrx Vex ; Vay Vry Vey . Модуль абсолютной скорости находится по её проекциям: Va Vax2 Vay2 . (1.4) 7 Направление абсолютной скорости определяется направляющими косинусами: V cos(Va , x) ax ; Va cos(Va , y ) Vay Va . (1.5) Зависимость между ускорениями точки в абсолютном, относительном и переносном движениях определяется теоремой сложения ускорений, известной в литературе как теорема Кориолиса [1]: Абсолютное ускорение точки а а равно геометрической сумме переносного ускорения а е , относительного ускорения а r и ускорения Кориолиса а с : a a ae a r a c . (1.6) Кориолисово ускорение вычисляется по формуле [1]: a c 2( e Vr ) , (1.7) где e – вектор угловой скорости переносного вращения, Vr – вектор относительной скорости точки. Модуль кориолисова ускорения равен: ac 2eVr sin(e , Vr ) . (1.8) Направление кориолисова ускорения определяется либо по правилу векторного умножения векторов e и Vr [2]: вектор ускорения ас направлен перпендикулярно плоскости, проходящей через векторы e и Vr , в ту сторону, откуда кратчайшее совмещение e с Vr видно происходящим против хода часовой стрелки; либо по правилу Жуковского [1]: чтобы найти направление ускорения Кориолиса, следует спроецировать относительную скорость точки на плоскость, перпендикулярную оси переносного вращения, и повернуть эту проекцию в той же плоскости на 900 в сторону переносного вращения. При пользовании теоремой сложения ускорений может быть применён метод проекций. Выбирая какую-либо систему координат xyz и проецируя равенство (1.6) на каждую из этих осей, находим: 8 a ax aex a rx a cx a ay a ey a ry acy a az a ez a rz a cz (1.9) При этом модуль абсолютного ускорения определится по формуле: 2 2 aa aax aay aaz2 , (1.10) а направление – через направляющие косинусы: aay aax a cos(aa , x) ; cos(aa , y ) ; cos(aa , z ) az aa aa aa (1.11) 1.4. План решения задач 1. Разложить сложное движение на составляющие: относительное, переносное и абсолютное движение. 2. Выбрать две системы координат: неподвижную (абсолютную) и подвижную. 3. Указать вектор переносной угловой скорости е и углового ускорения е . 4. Определить и показать на рисунке положение точки М на поверхности тела в данный момент времени t1. 5. Определить и обозначить на рисунке элементы траектории переносного и относительного движения точки в момент времени t1. 6. Определить относительную Vr , переносную Ve и абсолютную Va скорости точки в момент времени t1. 7. Определить направление вектора скорости V a . 8. Определить относительное ar и переносное a e ускорение точки в момент t=t1. 9. Определить модуль и направление ускорения Кориолиса ас . 10. Определить модуль и направление абсолютного ускорения аа , воспользовавшись формулами (1.10) и (1.11). 11. Векторы Vr , Ve , Va , ar , ae , ac , aa нанести на чертёж. 9 2. ПРИМЕРЫ ВЫПОЛНЕНИЯ ЗАДАНИЯ 2.1. Пример 1 На тележке, движущейся вправо из состояния покоя с ускорением а 0,5 м/с 2 по горизонтальному пути (рис. 2а), установлен электромотор, ротор которого при пуске в ход вращается равноускоренно с угловым ускорением 2 с -2 . Радиус ротора r 30 см . Для момента t 2 c определить скорость и ускорение точки А, лежащей на ободе ротора, если в этот момент точка А находится в положении, указанном на рис. 2. а) y б) О Va Vr 300 А 600 а A Ve y в) arn 49,4 0 138,60 aa 600 300 A 10 ar Рис. 2 ae x x Решение. Свяжем подвижную систему отсчёта с корпусом тележки, неподвижную – с Землёй. Абсолютное движение точки А обода ротора сложное: оно состоит из движения с ротором, вращающимся вокруг оси О, и движения в горизонтальном направлении вправо вместе с тележкой. Следовательно, точка А участвует в двух движениях: относительном – вращении вокруг оси ротора О, и переносном – поступательном движении вместе с тележкой. Для нахождения абсолютной скорости точки А применим теорему о сложении скоростей Va Ve Vr . Переносная скорость точки А равна скорости точки корпуса тележки, с которой совпадает в данный момент точка А. При поступательном движении тележки скорости всех её точек одинаковы, их модули определятся по формуле: Ve a t . При t 2 c Ve 0,5 м 2с 1м/с. 2 с Для определения относительной скорости точки А находим угловую скорость ротора по формуле: r t , при t 2 c r 4 c 1 . Тогда относительная скорость точки А будет равна Vr r ОА 4 0,3 1,2 м/с. Так как переносная и относительная скорости находятся под углом 600 (рис. 2б), то абсолютная скорость точки А определится по формуле (1.2): Va Ve2 Vr2 2VeVr cos 60 0 1,9 м/с. Направление вектора V a показано на рис. 2б. Модуль и направление вектора Va можно определить также, находя его проекции на оси прямоугольных координат Axy: Vax Vex Vrx Ve Vr cos 60 0 1 0,6 1,6 м/с . Vay Vey Vry 0 Vr cos 30 0 1,2 0,866 1,04 м/с. Va Vax2 Vay2 1,6 2 1,04 2 1,9 м/с. 11 Направление вектора Va найдём через направляющие косинусы V 1,6 cos(Va , x) ax 0,84; Va 1,9 cos(Va , y ) Vay Va 1,04 0,55 . 1,9 Следовательно, α ≈ 32,60. Абсолютное ускорение точки А мы можем найти, воспользовавшись теоремой Кориолиса для случая переносного поступательного движения aa ae ar . (2.1) Кориолисово ускорение в данном случае равно нулю. Переносное ускорение a e a 0,5 м/с 2 . Относительное ускорение точки А складывается из касательного ускорения ar и центростремительного (нормального) arn : ar ar arn . (2.2) Подставляя (2.2) в (2.1), получим: aa ar arn ae . (2.3) Все эти векторы изображены на рис. 2в. Касательное ускорение точки А в относительном движении найдём по формуле: a r ОА 2 0,3 0,6 м/с 2 . Так как угловое ускорение ε положительно, то ускорение ar будет направлено по касательной к окружности ротора в сторону вращения (рис. 2в). Центростремительное ускорение точки А находим по формуле: a rn 2 ОА 4 2 0,3 4,8 м/с 2 . Проецируя векторное равенство (2.3) на оси Аx и Аy, получим: aax arx arxn aex ar cos 600 arn cos 300 a 0,6 0,5 4,8 0,866 0,5 3,36 м/с 2 . aay ary aryn aey ar cos 300 arn cos 600 0 0,6 0,866 4,8 0,5 2,92 м/с 2 . Модуль абсолютного ускорения точки А: 2 2 a a a ax a ay ( 3,36) 2 2,92 2 4,45 м/с 2 . 12 Направление абсолютного ускорения точки А можно найти, определив направляющие косинусы вектора аа : cos(aa , x) cos(aa , y ) aax 3,36 0,75 aa 4,45 138,6 , aay 49,4 . aa 0 2,92 0,65 4,45 0 2.2. Пример 2 Круглая пластина радиуса R 60 см вращается вокруг неподвижной оси ОО1 по закону 6t 3 12t 2 . Положительное направление отсчёта угла показано на рис. 3 дуговой стрелкой, ось вращения ОО1 пластины лежит в плоскости пластины. По окружности радиуса R движется точка М, закон её относительного движения S АМ R(2t 2 1) ; l=R. Найти абсолютную скорость и абсо3 лютное ускорение точки М в момент t1=1 c. О1 2l А С M O АА Рис. 3 13 Решение. Рассмотрим движение точки М как сложное, считая её движение по дуге окружности S относительным, а вращение круглой пластины вокруг оси ОО1 – переносным движением. Тогда абсолютное движение точки М – это движение данной точки по отношению к неподвижной системе отсчёта Oxyz (рис. 4). а) Относительное движение точки М – это криволинейное движение точки М по окружности радиуса R по закону S АМ R( 2t 2 1) . 3 (2.4) Сначала установим, где будет находиться точка М на дуге окружности в момент времени t1. Полагая в уравнении (2.4) t1=1c, получим: S1 S R . Тогда АСМ 1 . 3 R 3 Скорость точки М в относительном движении определится выражением: dS R 4R 4t t. dt 3 3 4R При t1=1с Vr 251,33 см/с . 3 Vr Относительное ускорение точки М определим по формуле: a r arn ar , (2.5) Vr2 16 2 R 2 t 2 16 2 Rt 2 где a . R 9R 9 16 2 R n При t1=1с a r 1052,76 см/с 2 , 9 dV 4R a r r 251,33 см/с 2 . dt 3 n r Знаки показывают, что вектор относительной скорости Vr и относительного касательного ускорения a r направлены в сторону положительного отсчёта расстояния S , а вектор a rn направлен к центру С окружности. Изображаем все эти векторы на рис. 4. б) Переносное движение (вращение пластины) происходит по закону: = 6t3 – 12t2 . 14 z O1 2l e e е A D е Ve N C aen ас arn ae МM ar Vr O x y Рис. 4 Переносным движением точки М является движение той точки, вращающейся вокруг оси Оz круглой пластины, с которой в рассматриваемый момент времени совпадает точка М. Траекторией переносного движения точки М является окружность радиуса МД, лежащая в плоскости, перпендикулярной оси вращения ОО1 (рис. 4). Вектор переносной угловой скорости е направлен по оси Оz, его модуль найдём по формуле: d 18t 2 24t (с 1 ) . dt При t = t1 е 6 с 1 . e Знак минус указывает, что в момент t1 = 1с направление переносной угловой скорости противоположно направлению положи15 тельного отсчёта угла . Направление вектора е в данный момент времени противоположно положительному направлению оси Оz (рис. 4). Угловое ускорение переносного вращения определим по формуле: d e 36t 24 c 2 . dt При t = t1 , е 12 с 2 . e Знак плюс в значении е показывает, что в момент времени t1 вектор е имеет направление, противоположное с вектором e , следовательно, переносное движение является замедленным вращением. Векторы е и е изображены на рис. 4. Для определения переносной скорости и переносного ускорения точки М мысленно остановим относительное движение точки и определим скорость и ускорение той точки вращающейся круглой пластины, в которой в данный момент t1 = 1 c находится точка М. Модуль переносной скорости Ve точки М равен Ve e МД . Расстояние точки М до оси вращения Оz легко определить (рис. 4): 1 МД 2l CN 2l R cos 120 60 90 см. 2 Тогда при t=t1 Ve e 90 6 90 540 см/с. Вектор переносной скорости Ve направлен перпендикулярно пластине в сторону её вращения, то есть по направлению оси Оx (рис. 4). Ускорение точки М в переносном движении определим по формуле: ae aen ae , (2.6) где aen e2 МД , При t1=1 с ae e МД . a en 6 2 90 3240 см/с 2 , a e 12 90 1080 см/с 2 . 16 Вектор а еn направлен вдоль радиуса МД к оси вращения Оz. Вектор ае направлен перпендикулярно пластине в сторону, противоположную вращению пластины, то есть противоположно направлению переносной скорости Ve (рис. 4). в) Поскольку переносное движение непоступательное (в нашем случае – вращательное), то абсолютное ускорение точки М определим по теореме Кориолиса: aa ar ae ac , (2.7) где ac – вектор кориолисова ускорения, который определяется по формуле: a c 2( e Vr ) . Модуль кориолисова ускорения равен: ac 2 e Vr sin( e ; Vr ) . При t1=1 с найдём ac 2 6 251,33 sin 60 0 2611,9 см/с 2 . Направление вектора ускорения Кориолиса определим по правилу Жуковского: мысленно спроецируем вектор относительной скорости Vr на плоскость xOy, перпендикулярную вектору е , и повернём вектор-проекцию на 900 в сторону вращения круглой пластины. Получим вектор ас направленным параллельно оси Ox (рис.4). Направление ускорения Кориолиса можно определить также, воспользовавшись правилом векторного умножения векторов е и Vr . Учитывая характер относительного и переносного движения, а также формулы (2.5) и (2.6), формулу (2.7) перепишем следующим образом: aa aen ae arn ar ac (2.8) Для определения модуля и направления абсолютного ускорения спроецируем равенство (2.8) на оси Ox, Oy, Oz. a ax 0 a e 0 0 ac 1080 2611,9 1531,9 см/с 2 ; a ay aen 0 a rn cos 60 0 ar cos 30 0 0 3240 1052,76 0,5 251,33 0,866 2931,28 см/с 2 ; aaz 0 0 arn cos 300 ar cos 600 0 1052,76 0,866 251,33 0,5 1037,38 cм/с 2 . 17 Модуль абсолютного ускорения равен 2 2 aa aax aay aaz2 1531,9 2 2931,28 2 1037,38 2 3466,3 см/с 2 . Направление вектора аа определим через направляющие косинусы: cos(aa , x) cos(aa , y ) cos(aa , z ) aax 1531,9 0,442 aa 3466,3 aay aa 2931,28 0,846 3466,3 aaz 1037,38 0,299 aa 3466,3 (63,80 ) (147,7 0 ) (72,60 ) г) Абсолютная скорость точки М согласно теореме о сложении скоростей равна: Va Ve Vr . (2.9) В нашей задаче Ve Vr , следовательно, модуль абсолютной скорости найдём по формуле: Va Ve2 Vr2 V 251,332 540 2 595,62 см/с. Для определения направления вектора Va найдём направляющие косинусы вектора Va с осями координат. Для этого найдём проекции вектора Va на декартовы неподвижные оси координат Оx, При t t1 Oy, Oz (для момента времени t1=1 c) : Vax Ve 0 540 см/с ; Vay 0 Vr cos 30 0 251,33 0,866 217,66 см/с ; Vaz 0 Vr cos 60 0 251,33 0,5 125,66 см/с . Модуль абсолютной скорости можно найти и таким образом: Va Vax2 Vay2 Vaz2 540 2 217,66 2 125,66 2 595,62 см/с . 18 Тогда направляющие косинусы запишем так: Vax 540 0,907 Va 595,62 V 217,66 cos(Va , y ) ay 0,365 Va 595,62 V 125,66 cos(Va , z ) az 0,211 Va 595,62 cos(Va , x) (250 ) (68,60 ) (102,20 ) 2.3. Пример 3 Кривошип АМ вращается с угловой скоростью 2t 1 c 1 и приводит во вращение кулису ВВ1 при помощи ползуна М, который скользит вдоль прорези кулисы; АМ=l=40 см , АВ=h=30 см; t1=1 с; ( ВАМ=900). Определить: 1). Абсолютные, относительные и переносные скорости и ускорения точки М в момент времени t1. 2). Угловую скорость и угловое ускорение кулисы ВВ1 в данный момент времени t1, если положение механизма при t=t1 изображено на рис. 5. Рис. 5 19 Решение. Рассмотрим абсолютное движение точки М ползуна вместе с кривошипом АМ как сложное: относительное – прямолинейное движение ползуна вдоль прорези кулисы ВВ1, переносное – вращение вместе с кулисой ВВ1, абсолютное – вращение вместе с кривошипом АМ. Абсолютную скорость точки М определим в виде: (2.10) Va a AM ( 2t 1) l Здесь a – угловая скорость вращения кривошипа АМ. При t=t1=1c a 2 1 1 3 c 1 , Va 3 40 120 см/с . Вектор абсолютной скорости Va направлен перпендикулярно кривошипу АМ в сторону вращения кривошипа (рис. 6). y1 z Va ac x1 Ve aA a A a Vr α a An А y φ M ar а aen h а x В е е Рис. 6 20 B1 φ e Вектор абсолютной угловой скорости a направлен перпендикулярно к плоскости чертежа в направлении оси x неподвижной системы отсчёта Аxyz (к нам) (рис. 6). Тогда угловое ускорение кривошипа АМ (обозначим его a ) определится следующим образом: d a 2 c2 . dt Вектор a направлен по оси вращения кривошипа АМ по направлению вектора a . Так как a const , то кривошип АМ вращает- a ся равноускоренно. Для определения относительной и переносной скоростей точки М разложим вектор абсолютной скорости Va по направлению ВВ1 и перпендикулярному ему направлению (рис. 6). Это обусловлено тем, что движение кулисы ВВ1 вращательное, следовательно, вектор скорости точки М в переносном движении Ve перпендикулярен ВВ1, а вектор относительной скорости Vr направлен вдоль кулисы ВВ1. Тогда получим: Vr Va sin , Ve Va cos . (2.11) Величины cos и sin легко определить из MBA : АВ 2 АМ 2 302 402 50 см . AM AM 40 cos 0,8 2 2 2 2 BM AB AM 30 40 AB 30 sin 0,6 2 2 BM 30 40 ВМ (2.12) Подставляя (2.12) в (2.11) при t=t1=1 c, будем иметь: Vr Va 0,6 120 0,6 72 см/с ; Ve Va 0,8 96 см/с . Угловая скорость e переносного вращательного движения кулисы ВВ1 в момент t1=1c равна e Ve 96 1,92 c 1 . BM 50 21 Вектор e направлен по оси вращения кулисы ВВ1, то есть по направлению, параллельному оси Ах (рис. 6). Абсолютное ускорение точки М может быть найдено по формуле: (2.13) aa aan aa . Здесь aan – нормальное (центростремительное) ускорение в абсолютном движении; aa – касательное (вращательное) ускорение в абсолютном движении могут быть найдены следующим образом: aan a2 AM , aa a AM . При t1=1 c aan 32 40 360 см/с 2 , aa 2 40 80 см/с 2 , отсюда aa (aan ) 2 (aa ) 2 3602 802 368,78 см/с 2 . Для определения направления вектора абсолютного ускорения достаточно найти угол (рис. 6) aa a 2 tg n 2 2 0,222 aa a 3 12,5o . Ускорение точки М в переносном движении определится по формуле: (2.14) ae aen ae , где aen e2 BM , ae e BM . Вектор aen направлен по прямой В1В к центру вращения В, его модуль aen e2 BM 1,922 50 184,32 cм/c2, а вектор ae перпендикулярен aen , модуль и направление вектора ae надо найти. Вектор относительного ускорения ar точки М направлен вдоль прямой В1В, его модуль и направление надо найти. Ускорение ae и ar определим, воспользовавшись теоремой Кориолиса (1.6). Вычислим ускорение Кориолиса ас точки М в момент времени t1 (согласно (1.7)) по формуле: 22 ac 2 eVr sin e , Vr 2 1,92 72 sin 90o 276,48 см/с2. Направление вектора ac определим по правилу Жуковского: т.к. V r e , повернем вектор V r на 90о в сторону вращения кулисы ВВ1, таким образом получим вектор ac (рис. 6). Учитывая, что переносное (2.14) и абсолютное (2.13) ускорения точки М имеют центростремительную и вращательную составляющие, теорему Кориолиса запишем следующем образом: aan aa aen ae ar ac (2.15) В векторном соотношении (2.15) имеются две неизвестные векторные величины ae и ar . Эти неизвестные мы определим, проецируя векторное равенство (2.15) на оси подвижной системы отсчёта Мх1 и Мy1. Для определения ar проецируем векторное равенство (2.15) на Мх1, получим уравнение: aan cos aa sin aen ar , тогда при t=t1 ar aen aan cos aa sin 184,32 360 0,8 80 0,6 55,68 см/с 2 . (2.16) Знак минус в (2.16) показывает, что вектор относительного ускорения точки М в данный момент времени t1 ( ar ) направлен противоположно вектору относительной скорости V r (рис. 6). Проецируя выражение (2.15) на направление оси Му1 (рис. 6) подвижной системы отсчёта, получим уравнение для определения ae : aan sin aa cos ae ac ; отсюда получим: ae aan sin aa cos ac ; при t=t1 ae 360 0,6 800 0,8 276,48 3,52 см/с 2 . (2.17) 23 Знак плюс в (2.17) показывает, что вектор ae направлен по направлению вектора V e . Очевидно, угловое ускорение кулисы ВВ1 в момент времени t1 можно найти следующим образом: ae 3,25 e 0,07 c 2 . BM 50 Направление вектора e совпадает с направлением вектора e (рис. 6). 3. КИНЕМАТИЧЕСКИЙ АНАЛИЗ КУЛИСНОГО МЕХАНИЗМА В качестве приложения рассмотрим кинематический анализ кулисного механизма, который представляет интерес не только с учебной точки зрения, но и даёт студенту первые представления о схемах механизмов, тем самым расширяя его технический кругозор. Особая польза от рассмотрения подобных примеров механических специальностей как очной, так и заочной системы обучения. Механизмом называется система тел, предназначенная для передачи и преобразования движения одного или нескольких тел в требуемые движения других тел. Кулисный механизм – рычажный механизм, в состав которого входит кулиса (кулиса – подвижная направляющая). 3.1. Пример 4 Кулиса ОК кулисного механизма вращается с постоянной угловой скоростью =2 с-1. Определить абсолютную скорость и абсолют- 24 ное ускорение точек А и В механизма, если заданы размеры и положения звеньев (рис. 7). Дано: К ОА=20 см; О1А=20 см; ОВ= 50 см; =2 с-1; 1=75о ; 2=30о В V A , VB , a A , a B ? А О1 2 О 1 Рис. 7 Решение. Найдем абсолютные скорости точек А и В. Абсолютное движение точки А – вращение вокруг оси О1, относительное движение точки А вдоль кулисы ОК, переносное движение – вращение кулисы ОК вокруг оси О. На рис. 8 показаны направления скоростей: V A – абсолютная скорость точки А; VeA – переносная скорость точки А, VrA – относительная скорость точки А. Согласно условию задачи: VeA OA 2 20 40 см/с . (3.1) 25 По теореме о сложении скоростей: V A V eA V rA . Проецируя равенство (3.2) на ось Аy, будем иметь: VA cos1 2 VeA , отсюда VA VeA 40 56,57 см/с . cos1 2 cos(75o 30о ) x VeB VB В VrB VA VrA y VeA А (1- 2) 2 О1 О 1 Рис. 8 Определим VrA , проецируя (3.2) на ось Аx: 26 (3.2) (3.3) VA sin 1 2 VrA , тогда VrA 56,58 sin 45o 40 cм/с . (3.4) (3.5) Аналогично найдем скорость точки В: (3.6) V B V eB V rB , здесь VB – абсолютная скорость точки В, VeB – переносная скорость точки В, VrB – относительная скорость точки В. По условию задачи: VeB OB 2 50 100 см/с . Проецируя равенство (3.6) на ось Аy (рис. 8), получим: VB cos 90о 1 VeB , VeB 100 103,53 см/с . o sin 1 sin 75 Определим VrB , проецируя (3.6) на Ах: VB cos 1 VrB . Следовательно, VrB 103,53 cos 75o 26,79 см/с . отсюда VВ (3.7) (3.8) Определим ускорение точки А. По теореме о сложении ускорений [1] мы имеем: a A aeA arA acA . (3.9) Здесь a A – абсолютное ускорение точки А; aeA – переносное ускорение точки А; arA – относительное ускорение точки А; acA – кориолисово ускорение точки А (рис. 9). Раскладывая абсолютное и переносное ускорения на нормальную и касательную составляющие, равенство (3.9) перепишем слеn дующим образом: a An a A aeA (3.10) aeA arA acA . По условию задачи угловое ускорение в переносном движении равно нулю, поэтому aeA 0 и равенство (3.10) запишется так: a An a A aeAn arA acA . (3.11) Вычислим каждое слагаемое в равенстве (3.11): n aeA 2 OA 2 2 20 80 см/с 2 , 27 VA2 56,57 2 a 160,0 см/с 2 , O1 A 20 aсA 2 VrA sin ; VrA 2 2 40 160 см/с 2 . n A x a A y acA arA aeA (1-2) А a An 2 О1 aeAn О 1 Рис. 9 Неизвестными в векторном равенстве (3.11) остаются a A и arA . Для их нахождения спроецируем (3.11) на ось Аy: a An sin 1 2 aA cos1 2 acA , тогда: acA a nA sin 1 2 160 160 sin 45o a 66,27 см/с 2 . o cos1 2 cos 45 Проецируя (3.11) на ось Аx, вычислим значение arA . n a An cos1 2 aA sin 1 2 aeA arA , отсюда: n arA a An cos1 2 aA sin 1 2 aeA 160,0 cos 45o 66,27 sin 45o 80 13,72 см/с 2 . A 28 Сделаем проверку аналитического решения, построив диаграмму (план) ускорений точки А (рис. 10). А a An arA aeAn a A acA Рис. 10 Аналогично определим ускорение точки В (рис. 11). x arB 1 В aB acB n eB a y Рис. 11 aB aeBn arB acB . (3.12) n Здесь aB – абсолютное ускорение точки В; aeB – нормальная составляющая переносного ускорения точки В (касательная равна ну- 29 лю); arB – относительное ускорение точки В; acB – кориолисово ускорение точки В. Вычислим каждое слагаемое в равенстве (3.12): n aeB 2 OB 2 2 50 200 cм/с 2 , acB 2 VrB 2 2 26,79 107,16 см/с 2 . Проецируя (3.12) на Вy, получим: aB sin 1 acB , a 107,16 отсюда aB cB 110,94 см/с 2 . o sin 1 sin 75 n Проецируя (3.13) на Вх, найдём arB : aB cos 1 aeB arB , следовательно, n arB aB cos 1 aeB 110,94 cos 75o 200 228,71см/с 2 . Диаграмма ускорений точки В: aB В aeBn arB acB Рис. 12 30 4. ВОПРОСЫ ДЛЯ САМОКОНТРОЛЯ 1. В каких случаях движение точки целесообразно рассматривать как сложное? Привести примеры. 2. Какое движение точки называется абсолютным? 3. Какое движение точки называется относительным? 4. Какое движение точки называется переносным? 5. Дайте определение абсолютной скорости и абсолютного ускорения точки в сложном движении. 6. Дайте определение относительной скорости и относительного ускорения точки в сложном движении. 7. Дайте определение переносной скорости и переносного ускорения точки в сложном движении. 8. Сформулируйте теорему сложения скоростей точки при её сложном движении. 9. Как определить направление ускорения Кориолиса? 10. Как вычислить модуль ускорения Кориолиса? В каких случаях ускорение Кориолиса равно нулю? 11. Записать векторное выражение кориолисова ускорения. 12. Сформулировать теорему Кориолиса. 13. Чему равно абсолютное ускорение точки в случае поступательного переносного движения? 31 БИБЛИОГРАФИЧЕСКИЙ СПИСОК 1. Яблонский А.А. Курс теоретической механики. Изд. 7-е. – СПб.: Изд-во «Лань», 1999. 2. Тарг С.М. Краткий курс теоретической механики. Изд.12-е.– М.: Высшая школа, 1998. 3. Бать М.И. Теоретическая механика в примерах и задачах. Т.1./ М.И. Бать, Г.Ю. Джанелидзе, А.С. Кельзон – М.: Наука, 1984. 4. Цывильский В.Л. Теоретическая механика.– М.: Высшая школа, 2001. 5. Никитин Н.Н. Курс теоретической механики.– М.: Высшая школа, 2003. 6. Кирсанов М.Н. Решебник. Теоретическая механика.– М.: Физматлит, 2002. 7. Сборник заданий для курсовых работ по теоретической механике: Учебное пособие для технических вузов. 4-е изд., переработанное и дополненное. /А.А. Яблонский и др. – М.: Высшая школа, 1985. 8. Мещерский И.В. Сборник задач по теоретической механике.– М.: Наука, 1981. 32