методы управления движением космического робота в
advertisement

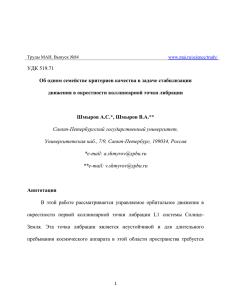
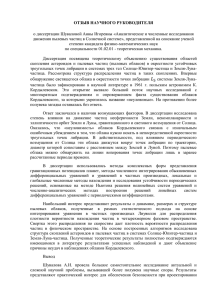
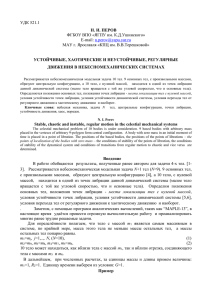
3792 УДК 531.2/.6 МЕТОДЫ УПРАВЛЕНИЯ ДВИЖЕНИЕМ КОСМИЧЕСКОГО РОБОТА В ОКРЕСТНОСТИ ТОЧЕК ЛИБРАЦИИ Ф.М. Кулаков Санкт-Петербургский институт информатики и автоматизации РАН Россия, 199178, Санкт-Петербург, 14 линия, 39 E-mail: kufelix@yandex.ru А.С. Шмыров Санкт-Петербургский государственный университет Россия, 198504, Санкт-Петербург, Петергоф, Университетский пр., 35 E-mail: ashmyrov@yandex.ru Д.В. Шиманчук Санкт-Петербургский государственный университет Россия, 198504, Санкт-Петербург, Петергоф, Университетский пр., 35 E-mail: shymanchuk@mail.ru Ключевые слова: космический робот, круговая ограниченная задача трех тел, точки либрации, управляемое движение Аннотация: Доклад посвящен исследованию задачи управления космическим роботом, который функционирует в околоземном космическом пространстве при маневрировании с использованием неустойчивых точек либрации системы Солнце-Земля. Движение робота в космическом пространстве рассматривается в рамках круговой ограниченной задачи трех тел. Показана возможность маневрирования в околоземном космическом пространстве с возвращением в окрестность коллинеарной точки либрации и стабилизации космического робота в ее окрестности. 1. Введение Одним из наиболее привлекательных направлений развития современной космонавтики является космическая робототехника, основной целью которой является создание и развитие сложных механизмов способных функционировать в суровых условиях космической среды. Космическая робототехника имеет важное значение для общей способности, а следовательно и эффективности, работать в космосе, она уже существенно расширяет функциональные возможности космических аппаратов, позволяет существенно помочь космонавтам в открытом космосе или полностью освободить от работы в опасных условиях. В целом космическая робототехника открывает новые возможноXII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3793 сти для развития традиционной космонавтики, связанного с созданием и развитием принципиально новых типов космических аппаратов, например, конструирования в космосе больших (массивных, протяженных) космических станций, которые совершают управляемые маневры в околоземном пространстве. Особенно актуален такой подход при исследовании других небесных тел, например, при решении проблемы кометно-астероидной опасности. Очевидно, что проектирование проектов, предполагающих использование систем космической робототехники, должно включать оценку возможности их осуществления на практике, что с необходимостью влечет использование весьма сложных уравнений небесной механики. При космическом маневрировании существенную роль могут сыграть так называемые коллинеарные точки либрации системы Солнце Земля [1]. Движение космического робота (КР) под действием сил тяготения двух притягивающих тел, таких как Земля и Солнце, может быть описано моделью круговой ограниченной задачи трех тел. В рамках этой модели исследуется движение тела малой массы p под действием гравитационных полей притяжения двух массивных тел E и S, обращающихся вокруг их общего центра инерции. Тела рассматриваются как материальные точки, считается также, что тело бесконечно малой массы p не влияет на движение притягивающих центров E и S. L4 60 L3 L1 Sun Earth L2 60 L5 Рис. 1. Точки либрации системы Солнце-Земля Известно, что уравнения задачи трех тел имеют пять стационарных решений – эти решения в небесной механике называют точками либрации или точками Лагранжа. Три из них L1 , L2 , L3 – коллинеарные точки либрации – являются неустойчивыми положениями равновесия во вращающейся системе координат, L4 и L5 – устойчивы и в силу расположения в пространстве конфигураций их называют треугольными [1]. XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3794 Точки либрации являются абстрактными понятиями круговой ограниченной задачи трех тел, однако их свойства определяют качественный характер орбитального движения КР, который в реальности происходит под действием многих возмущающих факторов. Задача исследования орбитального движения в окрестности коллинеарной точки либрации системы Солнце-Земля уже давно имеет практическое значение в связи с проектами (ISEE-3, SOHO, WIND, ACE, Genesis и т. д.), реализуемыми Национальным управлением по воздухоплаванию и исследованию космического пространства (NASA) и Европейским космическим агентством (ESA). 2. Область исследования Развитие космонавтики с недавнего времени позволяет реализовывать проекты, связанные с использованием окрестностей коллинеарных точек либрации L1 и L2 [2], и с учетом их свойств становится очевидной актуальность задачи стабилизации КР в их окрестности [3–6]. В тоже время неустойчивость коллинеарных точек либрации может являться и положительным фактором, способствующим космическому маневрированию с относительно небольшими энергетическими затратами [7–10]. Все это требует построения законов управления, как стабилизирующих орбитальное движение, так и способствующих эффективному перемещению космического робота в околоземном космическом пространстве. В этой связи предлагается разработка методов телеуправления космическими робототехническими системами в околоземном космическом пространстве с использованием окрестностей точек либрации. Специфика поставленной задачи определяется следующими факторами: • коллинеарная точка либрации является неустойчивой, т.е. космический аппарат, двигаясь по галоорбите [2] вокруг коллинеарной точки либрации и получив возмущение, может существенно покинуть ее окрестность, • большая задержка по времени передачи управляющих сигналов с центра управления на орбиту и обратно, • функционирование космического аппарата в недетерминированной внешней среде, которая, не обладая свойством предсказуемости, но характер воздействия которой определен, способна внести возмущения, влияющие на орбитальное движение. Управление таким космическим аппаратом с учетом задержки по времени передачи сигнала и недетерминированной внешней среды рационально осуществлять в так называемом супервизорном режиме [11–13], когда человек выполняет роль супервизора. Для этой цели предполагается использование двух видов телеуправления: • автономный, через информационно управляющий комплекс расположенный на самом КР, • дистанционный, через человека-оператора находящегося в центре управления. XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3795 Неустойчивость коллинеарной точки либрации является в то же время положительным фактором и позволяет КР осуществлять различные маневры, в том числе очень большой протяженности без существенных затрат энергии реактивных двигателей, используя для перемещения в основном силы гравитационного притяжения или в будущем, возможно, давление света с привлечением таких экзотических систем управления как солнечный парус. Для длительного пребывания КР в окрестности точки либрации прежде всего необходимо решение задачи его стабилизации, а это в свою очередь открывает путь создания и использования специальных КР с целью выполнения там большого количества разнообразных задач, в том числе робототехнических, например, операций сборки космических станций. 2.1. Уравнения движения Уравнения движения КР во вращающейся системе координат при использовании хилловского приближения для солнечного потенциала могут быть представлены в виде [3] (1) ẋ1 = x2 + y1 , ẋ2 = −x1 + y2 , ẋ3 = y3 , 3x1 + 2x1 + y2 , ẏ1 = − kxk3 3x2 ẏ2 = − − x2 − y 1 , kxk3 3x ẏ3 = − 33 − x3 , kxk здесь x = (x1 ; x2 ; x3 ) – вектор координат КР, y = (y1 ; y2 ; y3 ) – вектор импульсов, центр инерции Земли совпадает с началом системы координат, а ось Ox1 направлена вдоль оси, соединяющей центры масс Земли и Солнца, k · k – евклидова норма вектора. В принятой модели единицы времени и расстояния выбраны таким образом, что единица расстояния приблизительно равна 10−2 а. е. ≈ 1, 5 · 106 км, а единица времени – 58,0916 суток (год, деленный на 2π). Точки либрации L1 , L2 во вращающейся системе неподвижны и имеют координаты x∗ = (1; 0; 0), y ∗ = (0; 1; 0) и x∗∗ = (−1; 0; 0), y ∗∗ = (0; −1; 0) соответственно. Система (1) – гамильтонова, где функция Гамильтона H (2) 1 3 3 kxk2 H = kyk2 − − x21 + + x2 y 1 − x1 y 2 . 2 kxk 2 2 Известно, что гамильтониан (2) на траекториях движения сохраняет свое значение, т. е. является интегралом для системы (1). Этот факт может быть использован для оценки точности приводимых примеров численного интегрирования. 2.2. Траектория с возвращением в окрестность коллинеарной точки либрации Смоделируем применение управляющего воздействия в виде малого изменения скорости космического аппарата, находящегося в окрестности коллинеарной точки XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3796 либрации L2 . Результаты численного моделирования движения КР в плоскости эклиптики (если в начальный момент положить (x3 = 0; y3 = 0) приведены на рис. 2 и рис. 3. На рис. 2 видно, что с помощью весьма малого воздействия космический аппарат совершает протяженный маневр в околоземном космическом пространстве, время движения по траекториям - порядка года. На рис. 3 КР совершает маневр с возвращением в окрестность точки либрации L1 , которому соответствует больший промежуток времени. Начальный момент времени и способ применения управляющего воздействия подбираются так, чтобы обеспечить сближение с изучаемым небесным телом, траектория которого на рисунках обозначена пунктиром. 0.6 0.4 to Sun x2 0.2 0.0 L2 Earth L1 -0.2 -0.4 -1.0 -0.5 0.0 0.5 1.0 x1 Рис. 2. Траектория с возвращением в окрестность коллинеарной точки либрации L1 0.6 0.4 to Sun x2 0.2 0.0 L2 Earth L1 -0.2 -0.4 -1.0 -0.5 0.0 0.5 1.0 x1 Рис. 3. Траектория с возвращением в окрестность коллинеарной точки либрации L1 XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3797 2.3. Орбитальное движение в окрестности коллинеарной точки либрации Управляемые уравнения движения космического робота во вращающейся системе координат могут быть представлены в виде [3, 4, 6–8] ẋ1 = x2 + y1 , ẋ2 = −x1 + y2 , ẋ 3 = y3 , 3x1 ẏ + 2x1 + y2 + u1 , 1 = − 3 (3) kxk 3x2 ẏ2 = − − x2 − y 1 + u 2 , kxk3 3x ẏ3 = − 33 − x3 + u3 . kxk где u = (u1 ; u2 ; u3 ) – вектор ускорения. При этом единица ускорения будет равна 5, 93844 · 10−5 м/с2 ≈ 6, 05552 · 10−6 g, где g - стандартное ускорение свободного падения для Земли. Для обеспечения длительного пребывания космического робота в окрестности коллинеарной точки либрации L1 в рамках системы (3), как было показано в работах [4, 6–8], необходимо, чтобы для его фазовых координат выполнялось следующее соотношение: (4) d1 = |b1 z| 6 ε, p √ λ21 + 3 2 λ21 − 3 ; ; ), λ = 1 + 2 7, z = (x1 − 1; x2 ; y1 ; y1 − 1) 1 λ1 (λ21 + 5) λ1 (λ21 + 5) λ21 + 5 – вектор-столбец, ε – достаточно малое вещественное число. где b1 = (1; 2.4. Примеры Рассмотрим орбитальное движение КР в зависимости от значения введенной функции (4). XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3798 1. Пусть в начальный момент времени КР имеет в фазовом пространстве координаты: x = (0, 99; 0; 0), y = (0; 1; 0). 0.06 0.04 0.02 L1 0.92 0.94 0.96 0.98 1.00 1.02 -0.02 -0.04 -0.06 Рис. 4. Траектория орбитального движения в окрестности коллинеарной точки либрации L1 d1 0.05 0.04 0.03 0.02 0.01 10 20 30 40 t -0.01 -0.02 Рис. 5. Значение функции опасности на траектории орбитального движения в окрестности коллинеарной точки либрации L1 (см. рис. 4) XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3799 2. Пусть в начальный момент времени КР имеет в фазовом пространстве координаты: x = (1; 0; 0), y = (0; 0, 99; 0). 0.010 0.005 L1 0.985 0.990 0.995 1.000 -0.005 -0.010 Рис. 6. Траектория орбитального движения в окрестности коллинеарной точки либрации L1 d1 0.0014 0.0012 0.0010 0.0008 0.0006 0.0004 0.0002 10 20 30 40 t Рис. 7. Значение функции опасности на траектории орбитального движения в окрестности коллинеарной точки либрации L1 (см. рис. 6) 3. Заключение Пусть в начальный момент времени космический аппарат находится в окрестности фазового пространства коллинеарной точки либрации, а затем совершает маневр, обеспечивающий наблюдение за околоземным пространством. Здесь можно использовать малое управляющее воздействие, которое становится эффективным в силу XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3800 неустойчивости коллинеарной точки либрации. Именно в этом случае неустойчивость является положительным фактором, позволяющим при малых энергетических затратах существенно изменить траекторию движения. Справедливость данного утверждения видна из примеров, приведенных в п. 2.3. Очевидно, что такого типа космический аппарат может быть многократно использован для исследования околоземного космического пространства. Следует отметить, что при совершении такого маневра и возникает задача построения «траектории возвращения» [7, 8] и удержания космического аппарата в окрестности коллинеарной точки либрации [3, 4, 6]. Поэтому разработка методов построения стабилизирующих телеуправлений, например, на основе введенной функции (4), является весьма важной и перспективной задачей при обеспечении эффективного функционирования робототехнических систем в окрестности коллинеарной точки либрации системы Солнце-Земля на длительном промежутке времени. На основании рассмотренного следует отметить возможность осуществления необходимого управления при использовании таких экзотических систем как солнечный парус [3, 4, 6–10], его применение оказывается возможным в силу достаточно малых значений управляющего воздействия. Конечно, более точная оценка возможности осуществления необходимого маневра КР может быть получена при учете, в том числе, и других возмущений (влияния эксцентриситета орбиты Земли, Луны, других планет и т. д.). В то же время это влечет рассмотрение КР как твердого тела (не материальной точки), перемещение которого описывается сложными математическими уравнениями, учитывающими как поступательное, так и вращательное движение. Список литературы 1. 2. 3. 4. 5. 6. 7. 8. 9. Маркеев А.П. Точки либрации в небесной механике и космодинамике. М.: Наука, 1978. 312 с. Howell K.C. Families of orbits in the vicinity of the collinear libration point // Journal of the Auronautical Sciences. 2001. Vol. 49., No. 4. P. 107-125. Шмыров В.А. Стабилизация управляемого орбитального движения космического аппарата в окрестности коллинеарной точки либрации L1 // Вестн. С.-Петерб. ун-та. Сер. 10: Прикладная математика, информатика, процессы управления. 2005. Вып. 2. С. 193-199. Шмыров А.С., Шмыров В.А. Оптимальная стабилизация орбитального движения КА в окрестности коллинеарной точки либрации L1 // Четвертые Поляховские чтения: избр. труды. СПб.: Изд-во «ВВМ», 2006. С. 296-300. G. Gomes, J. Llibre, R. Martinez, C. Simo, Dynamics and mission design near libration points. Vol. 1. River Edge, 2001. 443 p. Шиманчук Д.В. Моделирование орбитального управляемого движения космического аппарата в окрестности коллинеарной точки либрации L1 // Вестн. С.-Петерб. ун-та. Сер. 10: Прикладная математика, информатика, процессы управления. 2010. Вып. 3. С. 86-92. Шиманчук Д.В., Шмыров А.С. Исследование траекторий возвращения в окрестность коллинеарной точки либрации // XI Белорусская математическая конференция: Тез. докл. Междунар. науч. конф. Минск, 5-9 ноября 2012 г. Часть 3. Минск: Институт математики НАН Беларуси, 2012. Шиманчук Д.В., Шмыров А.С. Построение траетории возвращения в окрестность коллинеарной точки либрации ситсемы Солнце-Земля // Вестн. С.-Петерб. ун-та. Сер. 10: Прикладная математика, информатика, процессы управления. 2013. Вып. 2. С. 76-85. Shymanchuk D.V., Shmyrov A.S. Maneuvering in near-Earth space whish the use of the collinear libration points // XVI International Conference, Dynamical System Modelling and Stability Investigation, Abstracts of conference reports. Kiev, Ukraine, May 29-31, 2013. XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г 3801 10. 11. 12. 13. Kulakov F.M., Shmyrov A.S., Shymanchuk D.V., Supervisory Remote Control of Space Robot in an Unstable Libration Point // Proceedings of the 7th IEEE International Conference on Intelligent Data Acquisition and Advanced Computing System: Technology and Applications 12-14 September 2013, Berlin, Germany, Berlin, 2013. Vol. 2. P. 925-928 Кулаков Ф.М. Супервизорное управление манипуляционными роботами. М.: Наука, 1980. 448 с. Алферов Г.В, Кулаков Ф.М., Нечаев А.И., Чернакова С.Э. Информационные системы виртуальной реальности в мехатронике и робототехнике: учеб. пособие. СПб.: Изд-во СанктПетербургского университета, 2009. 168 с. Kulakov F.M. Active Force-Torque Robot Control without Using Wrist Force-Torque Sensors // Journal of Computer and Systems Sciences International. 2012. Vol. 51, No. 1. P. 147-168. XII ВСЕРОССИЙСКОЕ СОВЕЩАНИЕ ПО ПРОБЛЕМАМ УПРАВЛЕНИЯ ВСПУ-2014 Москва 16-19 июня 2014 г