Лабораторная работа № 1.10 ИЗУЧЕНИЕ ЗАКОНОМЕРНОСТЕЙ ДВИЖЕНИЯ ТЕЛА В ПОЛЕ
advertisement

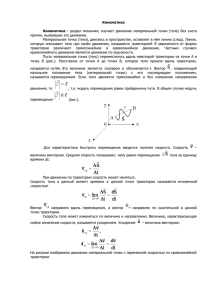
Лабораторная работа № 1.10 ИЗУЧЕНИЕ ЗАКОНОМЕРНОСТЕЙ ДВИЖЕНИЯ ТЕЛА В ПОЛЕ СИЛЫ ТЯЖЕСТИ ЗЕМЛИ: ДВИЖЕНИЯ ТЕЛА, БРОШЕННОГО ПОД УГЛОМ К ГОРИЗОНТУ. Цель работы: путем численного моделирования выяснить основные закономерности движения тела вблизи поверхности земли. Краткие теоретические сведения Кинематическим законом движения называется зависимость радиус вектора r , описывающего положение тела в пространстве, или его координат, от времени: x(t ) (1) r ( t ) = y (t ) . z (t ) Траекторией называется линия, которую описывает радиус-вектор, проведенный к телу, в процессе движения тела. Если траектория – прямая линия, движение называется прямолинейным, если кривая – криволинейным. Если траектория лежит в одной плоскости, движение называется плоским. Перемещением s называется вектор, соединяющий начальное и конечное положение тела. Быстроту изменения положения тела в пространстве характеризует скорость движения. Скорость – физическая величина численно равная первой производной по времени от радиус-вектора (или перемещения): dr ds (2) v= = . dt dt Быстроту изменения скорости с течением времени характеризует ускорение. Ускорение – это физическая величина, числено равная первой производной от скорости по времени или второй производной от радиус-вектора по времени: d v d 2 r . (3) a= = dt dt 2 Если зависимость r (t ) – линейная, скорость движения остается постоянной, а ускорение равно 0. Такое движение называется равномерным. Если зависимость r (t ) – квадратичная, v (t ) – линейная, а ускорение постоянно, движение называется равнопеременным. Скорость в любой момент времени направлена по касательной к траектории движения. Ускорение направлено так же, как и вызывающая его сила. При этом полное ускорение может быть представлено как векторная сумма двух составляющих – тангенциальной (направление вдоль направления движения, т.е. вдоль вектора скорости) и нормальной (направленной перпендикулярно направлению движения): (4) = a aτ ·τ + an ·n , Компьютерный лабораторный практикум по физике: уч.-метод. пособие / Сук А.Ф., Синельник И.В., Синельник А.В. – Харьков: Изд-во «Точка», 2011 1 где a – полное ускорение тела, aτ – проекция полного ускорения на направление движения, an – проекция полного ускорения на перпендикуляр a к направлению движения, τ – единичный вектор в направлении движения, единичный вектор в направлении n – перпендикулярном направлению движения к an центру кривизны. Тангенциальная составляющая ускорения или тангенциальное ускорение определяет изменение модуля скорости и равна: dv . (5) aτ = dt Нормальная составляющая ускорения, или нормальное (центростремительное) ускорение определяет изменение направления скорости и равно: v2 (6) an = , R где R – радиус кривизны траектории. v aτ Физическая модель В данной лабораторной работе рассматривается движение материальной точки в поле силы тяжести y вблизи поверхности земли. В начальный момент времени точка находится в общем случае на Fc Fcy высоте h над поверхностью v0 земли. Начальная скорость ее vx равна v 0 и направлена под углом α0 Fcx α0 к горизонтальной плоскости (см. рис. 1). vy v На тело действует три mg силы: - сила тяжести Fт = mg 0 x направленная вертикально вниз, Рис.1 - сила сопротивления воздуха Fc , направленная в сторону, противоположную скорости и равная Fc = − Av − Bv 3 , где А, В – постоянные коэффициенты. Такая зависимость является хорошим приближением для произвольной зависимости силы сопротивления от скорости. Она может быть получена разложением произвольной функции Fc (v ) в ряд со степенями v . При этом физический смысл имеют слагаемые с нечетными степенями v , так как при изменении направления скорости (знак v ) автоматически изменяется на противоположное и значение силы. Компьютерный лабораторный практикум по физике: уч.-метод. пособие / Сук А.Ф., Синельник И.В., Синельник А.В. – Харьков: Изд-во «Точка», 2011 2 - сила ветра Fв , направленная горизонтально, пропорциональна скорости ветра, если направление ветра совпадает с направлением горизонтального движения материальной точки, то Fв > 0 . Сила ветра учитывается при наличии сопротивления воздуха. Если силой сопротивления воздуха пренебрегаем (коэффициенты А и В равны нулю), влияние ветра рассматривается как «снос» тела: к горизонтальной составляющей скорости добавляется скорость ветра. Движение является плоским. В соответствии с принципом независимости движения материальной точки рассматривается как суперпозиция горизонтального и вертикального движения. Математическая модель В общем виде уравнение движения материальной точки может быть записано в виде: (7) ma = mg + Fс + Fв Проекции на горизонтальную и вертикальную оси могут быть представлены как: − Fcx + Fв max = . (8) = − − ma F mg cy y Если угол скорости образует с горизонталью угол α, то dv x − ( Av + Bv 3 ) cosα + Fв m dt = . d v y 3 m = ± ( Av + Bv ) sin α − mg dt (9) Компьютерная модель Движение материальной точки отображается на экране в некотором масштабе, в реальном времени, выводится траектория движения и следующие кинематические характеристики движения: - время полета; - координата x или дальность полета; - координата y или максимальная высота; - полная скорость; - проекция скорости на ось x; - проекция скорости на ось y; - полное ускорение; - тангенциальное ускорение; - нормальное ускорение; - угол к горизонту. Уравнения (9), описывающие движение точки, в общем случае, с учетом силы сопротивления воздуха и силы ветра, не могут быть решены аналитически, поэтому для их решения используют численные методы. Компьютерный лабораторный практикум по физике: уч.-метод. пособие / Сук А.Ф., Синельник И.В., Синельник А.В. – Харьков: Изд-во «Точка», 2011 3 В данной работе для определения характеристик движения в произвольный момент времени и построения траектории был использован метод Эйлера. Начальные условия определяются положением и скоростью тела в начальный момент времени: (10) v x0 = v 0 cos α 0 , v y0 = v 0 sin α 0 . t0 = 0, x0 = 0, y0 = h, Задаем шаг по времени и определяем скорость и координаты точки по рекуррентным формулам: tn+1= tn + ∆t= t0 + (n + 1)∆t ; v x ,n+1 = v x ,n + ax ,n ∆t ; v y ,n+1 = v y ,n + a y ,n ∆t ; xn+1 = xn + v x ,n ∆t ; yn+1 = yn + v y ,n ∆t . Текущее значение ax и ay вычисляем по формулам, полученным из уравнений движения (9): F ax ,n = в − ( A + Bv n 2 ) v x ,n ; m a y ,n =− g + ( A + Bv n 2 ) v y ,n ; v n = v 2x ,n + v 2y ,n . Компьютерный лабораторный практикум по физике: уч.-метод. пособие / Сук А.Ф., Синельник И.В., Синельник А.В. – Харьков: Изд-во «Точка», 2011 4 Описание интерфейса программы Окно программы представлено на рисунке 2: строка меню (1), в пункте «Режим» переключаются режимы моделирования («Теория» или «Контрольное задание»); область отображения траектории (2), синим цветом отображается траектория движения тела, бордовым вектор начальной скорости v 0 , красным вектор текущей скорости тела v и векторы его проекций на оси ( v x и v y ), а зеленым вектор ускорения и векторы его проекций на оси (тангенциального a a τ и нормального a n ускорений); с помощью кнопки-флажка (поле (4)) «Скрыть векторы» можно скрыть векторы ускорения и скорости, однако траектория движения будет отображаться, с помощью кнопки-флажка (поле (4)) «Не очищать экран» можно управлять режимом отображения траекторий: если флажок установлен, то при запуске тела с другими начальными параметрами предыдущая траектория удалена не будет; область управления (3) − в соответствующие окна вводятся начальные параметры движения тела (начальная высота h0 над поверхностью земли, угол α0, под которым направлен вектор скорости относительно к горизонтальной плоскости, начальная скорость v 0 , коэффициента А и В, скорость ветра) либо с помощью кнопок вверх-вниз, расположенных справа от поля; либо прямо с клавиатуры; в поле (4) расположены кнопки , и для запуска, остановки и Компьютерный лабораторный практикум по физике: уч.-метод. пособие / Сук А.Ф., Синельник И.В., Синельник А.В. – Харьков: Изд-во «Точка», 2011 5 приостановки движения тела соответственно, кнопка предназначена для очистки экрана; область вывода параметров (5) содержит вкладки «Конечные параметры», где фиксируются параметры в конечной точке движения; «Текущие параметры», где фиксируются параметры в текущей точке траектории, отмеченной ЛК мыши в области (2), если при этом, не отпуская кнопку мыши, переместить курсор, то параметры будут изменяться в соответствии с новым положением. Для перехода на нужную вкладку, необходимо щелкнуть ЛК мыши на ее названии. Компьютерный лабораторный практикум по физике: уч.-метод. пособие / Сук А.Ф., Синельник И.В., Синельник А.В. – Харьков: Изд-во «Точка», 2011 6 Задания для моделирования I. Установить режим «Теория», вид «Скрыть векторы». Установить начальную высоту полета h = 0, коэффициенты силы сопротивления A = 0, B = 0, скорость ветра v В = 0. 1. Изменяя значения начальной скорости ( v 0 ) в диапазоне 10-20 м/с с шагом 2 м/с и угол, который составляет скорость с горизонтом в начальный момент времени (α0), в диапазоне от 150 до 750 с шагом 100, исследовать как влияет угол броска и начальная скорость на дальность полета и максимальную высоту подъема? по какой траектории движется тело? Результаты записать в тетрадь в виде ответов на вопросы. 2. Установить начальную скорость v 0 = 14 м/с. Изменяя α0 в диапазоне от 15º до 75º с интервалом 10º, определить угол броска, при котором дальность полета будет максимальной. Результат оформить в таблице 1. Таблица 1 v0 Smax α0 3. Повторить п.1.2 для v 0 = 18 м/с. Результат оформить в таблице 1. II. Установить режим «Теория», отменить вид «Скрыть векторы» (снять флажок). Установить h = 0, A = 0, B = 0, v 0 = 0. 1. .Установить v 0 = 18 м/с, α0 = 50º. а) Исследовать, как изменяется на протяжении полета: - угол, который образует скорость тела с горизонтальной осью; - вертикальная и горизонтальная составляющие скорости; - нормальная и тангенциальная составляющие ускорения; - радиус кривизны траектории в течение полета; - потенциальная и кинетическая энергия тела во время полета. б) Сравнить значение характеристик движения ( v 0 , v x, v y, аτ, аn, R, Eк, Еп) в начальный момент броска, верхней точке траектории и в конце движения. В каких точках траектории они имеют максимальное и минимальное значения? Результаты оформить в виде ответов на вопросы. 2. Повторить п.2.1 для других 2-3 значений v 0 и α0.. III. Установить режим «Теория», отключить вид «Скрыть векторы», включить вид «Не очищать экран». Исследовать, как изменится характер движения, если тело брошено под углом к горизонту с ненулевой высоты (h ≠ 0), если учесть силу сопротивления воздуха (А ≠ 0, В ≠ 0), если учесть силу ветра ( v в ≠ 0). 1. Установить h = 10м, А = 0, В = 0, v в = 0. Повторить п.1.2, п.1.3 и п.2.1. 2. Установить h = 0, А = 0,3 (кг/с), В = 0,003 (кг·с/м2), v в = 0. Повторить п. 1.2, п.1.3 и п. 2.1. 3. Установить h = 0, v 0 = 18 м/с, α0 = 45º, А = 0, В = 0. Изменяя значения скорости ветра в диапазоне от -20 м/с до 20 м/с с шагом 5 м/с, исследовать Компьютерный лабораторный практикум по физике: уч.-метод. пособие / Сук А.Ф., Синельник И.В., Синельник А.В. – Харьков: Изд-во «Точка», 2011 7 изменение характера движения. Как влияет скорость ветра на дальность полета, максимальную высоту подъема, угол падения и конечную скорость? по какой траектории движется тело? Результаты записать в тетрадь в виде ответов на вопросы. Сформулировать выводы. Компьютерный лабораторный практикум по физике: уч.-метод. пособие / Сук А.Ф., Синельник И.В., Синельник А.В. – Харьков: Изд-во «Точка», 2011 8 Контрольные вопросы 1. Как движется тело, брошенное под углом к горизонту? 2. Записать выражение зависимости перемещения и скорости от времени для тела, брошенного под углом к горизонту. 3. Чему равно значение центростремительного и тангенциального ускорения тела, брошенного под углом к горизонту в произвольной точке траектории? 4. Какой будет траектория движения тела, участвующего одновременно в равноускоренном и равномерном движении вдоль двух взаимно перпендикулярных осей? Компьютерный лабораторный практикум по физике: уч.-метод. пособие / Сук А.Ф., Синельник И.В., Синельник А.В. – Харьков: Изд-во «Точка», 2011 9