Об особенностях эллипсоидальных оценок в задачах
advertisement

Об особенностях эллипсоидальных оценок в задачах
управления при неопределённости.
Ширяев Владимир
студент 5 курса факультета ВМК МГУ имени М. В. Ломоносова
научный руководитель — академик А. Б. Куржанский
II традиционная молодёжная Школа
«управление, информация и оптимизация»
г. Переславль
25 июня 2010 г.
1 / 19
Исходная задача
Рассматривается система дифференциальных уравнений
ẋ(t) = A(t)x(t) + B(t)u(t) + C (t)v (t),
u(t) — управление,
v (t) — помеха.
(1)
Задано множество начальных позиций:
x(t0 ) ∈ 𝒳 0 = ℰ0 .
(2)
u(t) ∈ 𝒫(t) = ℰp (t),
v (t) ∈ 𝒬(t) = ℰq (t).
(3)
Выполнены ограничения:
Исходная задача
Все параметры непрерывны (множества — в метрике Хаусдорфа). Построить
внутренние оценки позиционного множества достижимости.
Неопределённость
Неопределённость — только в неизвестности помехи. На помеху имеется только
геометрическое ограничение. Других требований нет.
2 / 19
Исходная задача
Позиционное множество достижимости
𝒳 (𝜃, t0 , 𝒳 0 ) — все точки x, такие что для любой допустимой помехи найдутся
допустимая начальная позиция и допустимый синтез, такие что позиция
переводится системой
ẋ(t) = A(t)x(t) + B(t)u(t, x(t)) + C (t)v (t)
в точку x в момент времени 𝜃.
В системах с помехами целесообразно рассматривать именно синтез. Свойства
задачи для программных и синтезированных управлений принципиально
отличаются.
Требования на параметры задачи
Для того, чтобы это множество не было пустым, требуется, чтобы 𝒳 0 было
«достаточно большим» (по сравнению с 𝒬). Считается, что управление «не
слабее» помехи:
C (t)ℰq (t) ⊆ B(t)ℰp (t).
Есть некоторая связь с теорией игр
В рассматриваемой задаче управление и помеха в каком-то смысле «играют друг
против друга», а в теории, изучающей позиционные множества достижимости,
возникают конструкции, характерные для теории игр.
3 / 19
Эллипсоидальный метод оценивания
Суть метода
Строятся внутренние ℰ− (t, l0 ) оценки множества достижимости, касающиеся
его в известных точках. Для того, чтобы построить одну оценку, нужно
решить одну задачу Коши для матриц.
Метод хорошо работает при некоторых условиях. Есть разумные примеры
задач, в которых эти условия не выполнены.
Цель докладчика
Найти способ от этих условий избавиться.
Имеющийся на данный момент результат
Условия ослаблены, но даже в ослабленном виде они не выполняются для
разумных примеров задач.
4 / 19
Описание используемых конструкций
Опорная функция, опорная точка, опорная плоскость
n
Пусть
(︀ ⃒𝒜)︀— выпуклое компактное множество пространства R . Опорная функция
𝜌 𝒜 ⃒ l множества 𝒜 в направлении l определяется следующим образом:
(︀ ⃒ )︀
𝜌 𝒜 ⃒ l = sup ⟨y , l⟩ .
y ∈𝒜
Точка x из множества 𝒜 — опорная для направления l, если
(︀ ⃒ )︀
𝜌 𝒜 ⃒ l = ⟨x, l⟩ .
Опорной плоскостью ко множеству 𝒜 в направлении l называется плоскость,
задаваемая уравнением
(︀ ⃒ )︀
⟨x, l⟩ = 𝜌 𝒜 ⃒ l .
Опорная функция выпукла и положительно однородна по l.
Как определяется эллипсоид
Пусть Q — неотрицательно определённая матрица. Эллипсоидом ℰ(Q, q) с
центром q и матрицей Q называется множество, такое что
1
⃒ )︀
(︀
𝜌 ℰ(Q, q) ⃒ l = ⟨l, q⟩ + ⟨l, Ql⟩ 2 .
5 / 19
Описание используемых конструкций
Сумма множеств по Минковскому
𝒜 + ℬ = {a + b : a ∈ 𝒜, b ∈ ℬ} =
⋃︁
(A + b).
b∈B
Разность множеств по Минковскому
· ℬ=
𝒜−
⋂︁
(A − b).
b∈B
В теории дифференциальных игр аналогичная конструкция известна под
названием «геометрическая разность Понтрягина». Разность и сумма по
Минковскому не являются взаимно обратными операциями: в общем случае
выполнено
· B) + B ⊆ A.
(A −
Для опорных функций выполнены свойства:
⃒ )︀
(︀
(︀ ⃒ )︀
(︀ ⃒ )︀
∀l ∈ Rn 𝜌 A + B ⃒ l = 𝜌 A ⃒ l + 𝜌 B ⃒ l ,
⃒
⃒
⃒
)︀
(︀
(︀
)︀
(︀
)︀)︀
(︀ ⃒ )︀
(︀ ⃒ )︀
(︀
· B ⃒ l = conv 𝜌 A ⃒ l − 𝜌 B ⃒ l 6 𝜌 A ⃒ l − 𝜌 B ⃒ l .
∀l ∈ Rn 𝜌 A −
6 / 19
Эллипсоидальный метод оценивания
Для системы (1), где в условиях (2) и (3) ℰ0 = ℰ(x0 , X0 ), ℰp (t) = ℰ(P(t), p(t)),
ℰq (t) = ℰ(Q(t), q(t)), всякая внутренняя оценка ℰ(x− (t), X− (t, l0 ))
параметризована вектором l0 из Rn и получается как решение следующей задачи
Коши:
⎧
𝜕X− (t, l0 )
⎪
⎪
= A(t)X− (t, l0 ) + X− (t, l0 )AT (t)+
⎪
⎪
𝜕t 1
⎪
⎪
1
⎪
(︀
)︀ 1
(︀
)︀ 1
⎪
⎪
⎪
+ X−2 (t, l0 )S(t, l0 ) B(t)P(t)B T (t) 2 + B(t)P(t)B T (t) 2 S T (t, l0 )X−2 (t, l0 )−
⎪
⎪
⎪
⎪
⎨
− 𝜋(t, l0 )X− (t, l0 ) − 𝜋 −1 (t, l0 )C (t)Q(t)C T (t),
⎪
1
⎪
(︀
)︀ 1
⎪
⎪
⎪
X−2 (t, l0 )l(t, l0 ) S(t, l0 ) B(t)P(t)B T (t) 2 l(t, l0 ), S(t, l0 )S T (t, l0 ) = I ,
⎪
⎪
⎪
1
1
⟨︀
⟩︀
⎪
⎪
⎪
𝜋(t, l0 ) = l(t, l0 ), C (t)Q(t)C T (t)l(t, l0 ) 2 ⟨l(t, l0 ), X− (t, l0 )l(t, l0 )⟩− 2 ,
⎪
⎪
⎪
⎩
X− (t0 , l0 ) = X0 ,
⎧
dx− (t)
⎪
⎨
= A(t)x− (t) + B(t)p(t) + C (t)q(t),
dt
⎪
⎩ x− (t0 ) = x0 .
Опорные функции оценок совпадают с опорной функцией точного множества в
момент времени t вдоль вектора l(t, l0 ), определяемого задачей Коши
l̇(t, l0 ) = −AT (t)l(t, l0 ), l(t0 , l0 ) = l0 .
То есть, в момент времени t происходит касание внутренней оценкой точного
множества в опорной для направления l(t) точке.
7 / 19
Свойства метода
Скорость работы
Число арифметических операций пропорционально числу вычисляемых
оценок, числу точек на сетке по времени и кубу размерности фазового
пространства,
отлично масштабируется.
Имеются задачи, для которых оказывается достаточным построение одной
эллипсоидальной оценки.
Источники
A. B. Kurzhanski and I. Valyi. “Ellipsoidal Calculus for Estimation and Control”,
Birkhauser, Boston, 1997.
A. B. Kurzhanski, P. Varaiya. “Reachability Analysis for Uncertain Systems — the
Ellipsoidal Technique”, Journal of Dynamics of Continuous, Discrete and
Impulsive Systems, Ser. B., v. 9, № 3, 2002, pp. 347–367.
Проблема метода
Эллипсоидальные оценки могут «схлопываться». По формулам получается
неподходящая под условие неотрицательной определённости матрица, и дальше
эллипсоид представляет собой только центр с нулевыми полуосями.
8 / 19
Как строятся уравнения
Эволюционное уравнение
Отправной точкой при получении эллипсоидальных формул служит тот факт,
что разыскиваемое множество достижимости является максимальным по
включению решением эволюционного уравнения
(︀
(︀
)︀
)︀
· 𝜎(−C (t)𝒬(t)) = 0,
lim 𝜎 −1 h+ 𝒳 − (t + 𝜎), (I + 𝜎A)𝒳 − (t) + 𝜎B(t)𝒫(t) −
𝜎→0
−
𝒳 (t0 ) = 𝒳 0 .
Символ h+ означает полурасстояние по Хаусдорфу между двумя множествами:
h+ (𝒳 , 𝒴) =
min
𝛾∈H+ (𝒳 ,𝒴)
𝛾,
H+ (𝒳 , 𝒴) = {𝛾 : 𝒳 ⊆ 𝒴 + 𝛾ℬ(1)} .
Уравнения для матрицы внутренней эллипсоидальной оценки получаются из
эволюционного уравнения подстановкой вместо точного множества внутренней
оценки:
ℰ(X− (t + 𝜎, l0 )) ⊆
· 𝜎C (t)ℰ(Q(t))) +
(((I + 𝜎A(t))ℰ(X− (t), l0 ) + 𝜎B(t)ℰ(P(t))) −
+ ℰ(o 2 (𝜎)I ),
𝜎 → 0.
Последний член не играет роли, влияние оказывают первые три.
9 / 19
Выделяется подзадача
Соотношение для внутренней оценки приводит к следующей подзадаче:
Заданы матрицы Q1 , Q2 , Q3 и вектор l. Найти матрицу Q− , такую что
· ℰ(Q3 ),
ℰ(Q− ) ⊆ (ℰ(Q1 ) + ℰ(Q2 )) −
⃒ )︀
⃒ )︀
(︀
(︀
⃒
· ℰ(Q3 ) ⃒ l
𝜌 ℰ(Q− ) l = 𝜌 (ℰ(Q1 ) + ℰ(Q2 )) −
при условии, что оцениваемое множество непусто. Непустота может
обеспечиваться условием ℰ(Q2 ) ⊆ ℰ(Q3 ). Q− строится с помощью
эллипсоидальных формул оценивания суммы и разности.
Существуют простые формулы для внутренних и внешних оценок суммы любого
числа эллипсоидов и разности двух эллипсоидов, матрицы оценок дающие в
аналитическом виде. С их помощью:
строится эллипсоид ℰ(Q𝛼 ), касающийся изнутри ℰ(Q1 ) + ℰ(Q2 ) в
направлении l.
· ℰ(Q3 ) в
строится эллипсоид ℰ(Q𝛽 ), касающийся изнутри ℰ(Q𝛼 ) −
направлении l при условии
⃒ )︀
⃒ )︀
⃒ )︀
⃒ )︀)︀
(︀
(︀
(︀ (︀
(︀
𝜌 ℰ(Q𝛼 ) ⃒ l − 𝜌 ℰ(Q3 ) ⃒ l = conv 𝜌 ℰ(Q𝛼 ) ⃒ l − 𝜌 ℰ(Q3 ) ⃒ l
(⋆)
10 / 19
«Слабое место» в способе решения подзадачи
Подзадача:
Заданы матрицы Q1 , Q2 , Q3 и вектор l. Найти матрицу Q− , такую что
· ℰ(Q3 ),
ℰ(Q− ) ⊆ (ℰ(Q1 ) + ℰ(Q2 )) −
⃒ )︀
⃒ )︀
(︀
(︀
· ℰ(Q3 ) ⃒ l
𝜌 ℰ(Q− ) ⃒ l = 𝜌 (ℰ(Q1 ) + ℰ(Q2 )) −
строится эллипсоид ℰ(Q𝛼 ), касающийся изнутри ℰ(Q1 ) + ℰ(Q2 ) в
направлении l,
· ℰ(Q3 ) в
строится эллипсоид ℰ(Q𝛽 ), касающийся изнутри ℰ(Q𝛼 ) −
направлении l.
Возможные трудности
1
Не выполнено ℰ(Q3 ) ⊆ ℰ(Q𝛼 ).
2
Не выполнено условие (⋆).
В любом из этих случаев матрица-оценка суммы-разности по формулам
получится неподходящей.
Докладчиком полностью разрешена вторая проблема.
11 / 19
Решена задача
Заданы матрицы M1 > 0, M2 > 0 и вектор l. ℰ(M2 ) ⊆ ℰ(M1 ). Найти матрицу
M− > 0, такую что
· ℰ(M2 ),
ℰ(M− ) ⊆ ℰ(M1 ) −
⃒ )︀)︀
⃒ )︀
⃒ )︀
(︀ (︀
(︀
⃒
𝜌 ℰ(M− ) l = conv 𝜌 ℰ(M1 ) ⃒ l − 𝜌 ℰ(M2 ) ⃒ l .
(︀
1
Для тех направлений l, для которых не выполнено условие (⋆), найден
эллипсоид-оценка.
2
Полностью изучена структура направлений для разности эллипсоидов.
Определение плохого направления
При оценивании разности эллипсоидов ℰ(M1 ) и ℰ(M2 ) плохим называется такое
направление l, для которого не выполнено (⋆), то есть,
⃒ )︀)︀
⃒ )︀
⃒ )︀
⃒ )︀
(︀
(︀
(︀ (︀
(︀
𝜌 ℰ(M1 ) ⃒ l − 𝜌 ℰ(M2 ) ⃒ l ̸= conv 𝜌 ℰ(M1 ) ⃒ l − 𝜌 ℰ(M2 ) ⃒ l .
Упрощение задачи
Можно выбрать преобразование координат, такое что уменьшаемое
превращается в единичный шар, а вычитаемое — в эллипсоид с диагональной
матрицей D, у которого максимальная полуось равна Λ 6 1, минимальная — 𝜆.
Это преобразование не умаляет общности.
12 / 19
Критерий того, что направление — плохое
То, что направление l — плохое, и следующие четыре условия эквивалентны:
⟨l, Dl⟩ / ⟨l, l⟩ < Λ4 .
невозможность вдоль l коснуться вычитаемым уменьшаемого,
негладкость границы разности эллипсоидов,
отсутствие выпуклого компакта 𝒜, такого что
· ℰ(M2 )) + 𝒜 = ℰ(M1 ).
(ℰ(M1 ) −
13 / 19
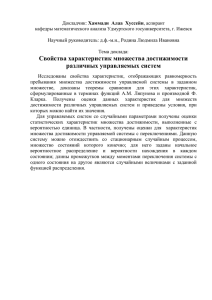
Иллюстрации разностей и структуры направлений.
(︀
(︀
)︀)︀
· ℰ diag 0.62 , 0.42 , 0.32
ℰ(I ) −
14 / 19
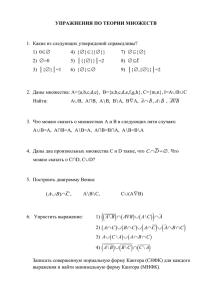
Иллюстрации разностей и структуры направлений.
(︀
(︀
)︀)︀
· ℰ diag 0.62 , 0.362 , 0.32
ℰ(I ) −
15 / 19
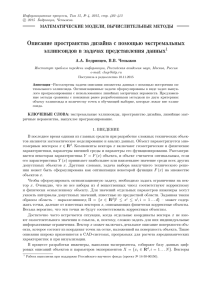
Иллюстрации разностей и структуры направлений.
(︀
(︀
)︀)︀
· ℰ diag 0.62 , 0.322 , 0.32
ℰ(I ) −
16 / 19
Особый случай
𝜆2 > Λ4 ⇐⇒ плохих направлений нет.
Специальный режим работы метода
Если такое условие выполнено для эллипсоидов B(t)ℰ(P(t)) управления и
C (t)ℰ(Q(t)) помехи, то для всякого выпуклого компакта 𝒜
· C (t)ℰ(Q(t)) = 𝒜 + (B(t)ℰ(P(t)) −
· C (t)ℰ(Q(t)))
(𝒜 + B(t)ℰ(P(t))) −
Это означает, что вместо эллипсоидальной оценки множества
· ℰ(Q3 )
(ℰ(Q1 ) + ℰ(Q2 )) −
можно строить эллипсоидальную оценку множества
· ℰ(Q3 )) ,
ℰ(Q1 ) + (ℰ(Q2 ) −
а при оценивании последнего эллипсоидальные формулы будут работать
гарантированно.
17 / 19
Свойство касания точного множества не обеспечивается
Построенная модификация метода может давать внутренние оценки, не
касающиеся точного множества.
Ситуация иллюстрируется оцениванием
(︂
Q1 =
0.12
0
· ℰ(Q3 ),
(ℰ(Q1 ) + ℰ(Q2 )) −
)︂
(︂ 2
)︂
(︂√ 2
0
2
0
3
, Q2 =
, Q3 =
2
2
0.3
0
1
0
0
0.52
)︂
.
0.6
0.4
0.2
0
−0.2
−0.4
−0.6
−0.5
0
0.5
18 / 19
Литература
A. B. Kurzhanski and I. Valyi. “Ellipsoidal Calculus for Estimation and Control”,
Birkhauser, Boston, 1997.
A. B. Kurzhanski, P. Varaiya. “Reachability Analysis for Uncertain Systems —
the Ellipsoidal Technique”, Journal of Dynamics of Continuous, Discrete and
Impulsive Systems, Ser. B., v. 9, № 3, 2002, pp. 347–367.
A. A. Kurzhanskiy and P. Varaiya. “Ellipsoidal Toolbox manual”, 2006-2008.
Половинкин Е. С., Балашов М. В. Элементы выпуклого и сильно выпуклого
анализа. М.: ФИЗМАТЛИТ, 2004.
Rolf Schneider. Convex bodies: the Brunn-Minkowski theory, Cambridge
University Press, Cambridge, 1993.
19 / 19