Спектральные характеристики линейных функционалов
advertisement

УДК 62-50
Спектральные характеристики линейных функционалов и их приложения
к анализу и синтезу стохастических систем управления
К.А. Рыбаков
В статье вводится понятие спектральных характеристик линейных функционалов,
исследуются их свойства. Рассматриваются возможные приложения полученных результатов
при решении задач анализа и синтеза нелинейных нестационарных стохастических систем
управления с использованием спектральной формы математического описания, в частности, для
определения моментных характеристик вектора состояния, маргинальных и условных
плотностей вероятности.
Введение
В работах [1–3] был предложен метод вероятностного анализа нелинейных нестационарных
стохастических систем управления, основанный на спектральной форме математического
описания [4,5], а в [6,7] этот подход был развит для решения задачи вероятностного анализа
стохастических систем с переменной структурой (систем со случайными изменениями структуры)
и стохастических непрерывно-дискретных систем. Для решения перечисленных выше задач были
введены
понятия
характеристик)
и
спектральных
спектральных
характеристик
характеристик
функций
(нестационарных
линейных
операторов
спектральных
(нестационарных
передаточных функций) и исследованы их свойства, на основании которых были построены
эффективные алгоритмы решения задачи вероятностного анализа, т.е. алгоритмы определения
плотности
вероятности
вектора
состояния
системы
управления
как
наиболее
полной
вероятностной характеристики. Однако в некоторых случаях для анализа и синтеза ряда систем
требуется
определение
моментных
характеристик
вектора
состояния,
вероятностных
характеристик активности структур для систем управления со случайными изменениями
структуры, нахождение маргинальных и условных плотностей вероятности [8,9], причем на всех
этапах вычислений удобно использовать спектральную форму математического описания систем
управления. В связи с этим для решения подобных задач спектральным методом возникает
необходимость представления линейных функционалов в спектральной форме математического
описания.
Спектральные характеристики линейных функционалов
Пусть W – линейный функционал, определенный на действительном пространстве L2 ( W ) ,
где W Í R n ; { p ( i1 , i2 ,..., in , x )}i1 , i2 ,..., in = 0 – базис пространства L2 ( W ) [10], x = [ x1
¥
x2 L xn ] . Будем
T
предполагать, что существует такая действительная функция w ( x ) , что для любой функции
h ( x ) Î L2 ( W ) справедливо равенство
W h ( x ) = ò w ( x ) h ( x ) dx .
(1)
W
Будем называть спектральной характеристикой линейного функционала W , определенной
относительно
базисной
(
системы
{ p ( i , i ,..., i , x )}
¥
1
2
n
i1 , i2 ,..., in = 0
,
гиперстрочную
матрицу
)
W ( 0, n ) = Wi1i2 ...in (см. приложение 1), элементы которой вычисляются по формуле
Wi1i2 ...in = ( p ( i1 , i2 ,..., in , x ) , w ( x ) ) L ( W ) ,
2
где
( . , . ) L ( W)
2
(u ( x ) , v ( x ))
i1 , i2 ,..., in = 0,1,2,... ,
(2)
– скалярное произведение в пространстве L2 ( W ) , т.е.
= ò u ( x ) v ( x ) dx
L2 ( W )
W
для любых u ( x ) , v ( x ) Î L2 ( W ) .
Отображение, ставящее в соответствие линейному функционалу его спектральную
характеристику, называется спектральным преобразованием и обозначается S :
S [ W ] = W ( 0, n ) .
Нетрудно видеть, что соотношение (2) также задает элементы спектральной характеристики
(
W ( n, 0 ) = Wi1i2 ...in
{ p ( i , i ,..., i , x )}
)
функции
¥
1
2
n
w( x) ,
определенной
относительно
базисной
системы
(см. приложение 2 и [3,6]). Таким образом, W ( 0, n ) = éëW ( n,0 ) ùû , где
T
i1 , i2 ,..., in = 0
éëW ( n, 0 ) ùû – транспонированная многомерная матрица [11,12].
T
Замечание. Если функционал W непрерывен, то по теореме Рисса [10] существует
единственная функция w ( x ) Î L2 ( W ) такая, что справедливо представление (1) и при этом
W = w( x )
L2 ( W )
, однако в ряде случаев функция w ( x ) может принадлежать пространству
обобщенных функций, тем не менее, ее спектральная характеристика вычисляется так же, как и
спектральные характеристики функций из пространства L2 ( W ) [4,5].
Теорема 1. Пусть W – линейный функционал, определенный на пространстве L2 ( W ) ,
h ( x ) Î L2 ( W ) , W ( 0, n ) – спектральная характеристика функционала W , а H ( n,0 ) – спектральная
характеристика функции h ( x ) . Спектральные характеристики W ( 0, n ) и H ( n,0 ) определены
относительно базисной системы { p ( i1 , i2 ,..., in , x )}i1 , i2 ,..., in = 0 . Тогда
¥
W h ( x ) = W ( 0, n ) × H ( n,0 ) ,
(3)
т.е. значение функционала W h ( x ) равно произведению спектральных характеристик функционала
W и функции h ( x ) .
Доказательство.
Из
соотношения
W h ( x ) = ò w ( x ) h ( x ) dx = ( w ( x ) , h ( x ) ) L
2
W
функциям
базисной
системы
(W) ,
(1)
¥
2
что
формально
тогда, представляя функцию h ( x ) в виде ряда по
{ p ( i , i ,..., i , x )}
1
следует,
n
i1 , i2 ,..., in = 0
и
используя
свойства
скалярного
произведения, получаем следующее выражение:
¥
¥
æ
ö
W h ( x ) = ç w ( x ) , å H i1i2 ...in × p ( i1 , i2 ,..., in , x ) ÷
= å ( w ( x ) , p (i1 , i2 ,..., in , x ) ) L W × H i1i2 ...in =
2( )
i1 ,i2 ,...,in = 0
è
ø L2 ( W ) i1 ,i2 ,...,in =0
=
¥
å ( p ( i , i ,..., i , x ) , w ( x ) )
i1 ,i2 ,...,in = 0
1
2
n
× H i1i2 ...in =
L ( W)
2
¥
å
i1 ,i2 ,..., in =0
Wi1i2 ...in × H i1i2 ...in ,
где Wi1i2 ...in – элементы спектральной характеристики функционала W (см. (2)), а H i1i2 ...in –
элементы спектральной характеристики функции h ( x ) , т.е.
H i1i2 ...in = ( p ( i1 , i2 ,..., in , x ) , h ( x ) ) L ( W ) ,
2
i1 , i2 ,..., in = 0,1,2,...
С учетом правила умножения многомерных матриц [11], отсюда следует, что
W h ( x ) = W ( 0, n ) × H ( n,0 ) .
<
Приведем примеры линейных функционалов.
1. Линейный функционал d x ¢ , ставящий в соответствие функции h ( x ) Î L2 ( W ) значение этой
функции в точке x¢ , x¢ Î W , т.е. d x ¢ h ( x ) = h ( x¢ ) .
Известно [10], что d x ¢ h ( x ) можно представить в виде d x ¢ h ( x ) = ò d ( x - x¢ ) h ( x ) dx , где d ( x - x¢ )
W
– d -функция векторного аргумента [10]. Тогда по определению спектральной характеристики
линейного функционала S [d x ¢ ] = D x ¢ ( 0, n ) , где элементы гиперстрочной матрицы D x ¢ ( 0, n )
задаются выражением
D i1i2 ...in = ò p ( i1 , i2 ,..., in , x ) d ( x - x¢ ) dx = p ( i1 , i2 ,..., in , x¢ ) ,
W
i1 , i2 ,..., in = 0,1,2,... ,
следовательно, значение функции h ( x ) в заданной точке x¢ вычисляется по правилу
h ( x¢ ) = D x ¢ ( 0, n ) × H ( n,0 ) ,
где H ( n,0 ) – спектральная характеристика функции h ( x ) , определенная относительно базисной
системы
{ p ( i , i ,..., i , x )}
¥
1
2
n
i1 , i2 ,..., in = 0
. Заметим, что полученное соотношение представляет собой
формулу обращения спектральных характеристик функций (см. приложение 2):
¥
å
h ( x¢ ) =
i1 ,i2 ,...,in = 0
H i1i2 ...in × p ( i1 , i2 ,..., in , x¢ ) ,
где H i1i2 ...in – элементы спектральной характеристики H ( n,0 ) , x¢ Î W .
2. Линейный функционал J , ставящий в соответствие функции h ( x ) Î L2 ( W ) значение
интеграла от этой функции по множеству W , т.е. J h ( x ) = ò h ( x ) dx .
W
соответствует функция w ( x ) = 1 , следовательно, по
Нетрудно видеть, что функционалу J
определению спектральной характеристики линейного функционала S [J
] = J ( 0, n ) , где элементы
гиперстрочной матрицы J ( 0, n ) задаются соотношением
J i1i2 ...in = ò p ( i1 , i2 ,..., in , x ) dx ,
W
i1 , i2 ,..., in = 0,1,2,...
Тогда значение функционала J определяется выражением
ò h ( x ) dx = J ( 0, n ) × H ( n,0 ) ,
W
при условии, что интеграл в левой части этого выражения существует и существуют интегралы в
соотношении для вычисления элементов спектральной характеристики функционала J .
Следует отметить, что спектральная характеристика J ( 0, n ) функционала J
выражена через спектральную характеристику W ( n,0 )
функции
может быть
w ( x ) = 1 , определенную
относительно базисной системы { p ( i1 , i2 ,..., in , x )}i1 , i2 ,..., in = 0 , а именно J ( 0, n ) = éëW ( n,0 ) ùû .
¥
+¥
Пример 1. Вычислим интеграл
òe
-
x2
2
T
dx , используя в качестве базисной системы для
-¥
спектрального преобразования функции Эрмита [13].
Рассмотрим функции Эрмита с параметрами m = 0 и D =
1
. Известно [13], что элементы
2
спектральной характеристики W (1,0 ) функции w ( x ) = 1 , определенной относительно выбранной
базисной системы, вычисляются следующим образом:
W0 = 4 4p ,
W1 = 0,
i -1
Wi - 2 ,
i
Wi =
i = 2,3, 4,...
é4
T
Тогда J ( 0,1) = éëW (1,0 ) ùû = ê 4p
ë
4p
2
4
0
ù
0 ... ú .
û
3 4 4p
2 2
0
x2
Найдем спектральную характеристику функции h ( x ) = e - 2 относительно системы функций
Эрмита. По определению элементы спектральной характеристики функции h ( x ) задаются
соотношением
+¥
ò F ( x ) h ( x ) dx ,
Hi =
i = 0,1,2,... ,
i
-¥
где F i ( x ) – функция Эрмита с номером i . Таким образом,
+¥
Hi =
ò Fi ( x ) e
-
x2
2
-¥
ìï 4 p , i = 0,
dx = í
ïî0, i = 1, 2,...,
T
т.е. H (1,0 ) = éë 4 p
0 0 0 0 0 ... ùû .
Следовательно, в силу теоремы 1 и правила умножения многомерных матриц значение интеграла
определяется выражением
+¥
òe
-
x2
2
¥
dx = J ( 0,1) × H (1, 0 ) = å Wi × H i = 4 4p × 4 p = 2p .
<
i =0
-¥
Введем новые обозначения. Пусть множество W представляется в виде W = W(1) ´ W( 2) , где
W(1) Í R m ,
x(1) = [ x1
W( 2) Í R n - m ,
1£ m < n ,
x2 ... xm ] Î W(1) ,
{ (
)}
{ (
)}
p( 2) im +1 ,..., in , x( 2)
T
¥
образует
i1 , i2 ,..., im = 0
¥
im+1 ,..., in = 0
(
вектор
x
x( 2) = [ xm +1 ... xn ] Î W( 2) .
T
p(1) i1 , i2 ,..., im , x(1)
а
базис
–
в
Пусть
также
пространства
T
x = éë x(1)
виде
x( 2 ) ùû ,
система
( )
L2 W(1) ,
а
где
функций
система
( )
является базисом пространства L2 W( 2) . Функцию h ( x ) будем
)
записывать в виде h x(1) , x( 2) . Кроме того, будем полагать, что функции базисной системы
{ p ( i , i ,..., i , x )}
¥
1
2
n
i1 , i2 ,..., in = 0
пространства
L2 ( W )
порождаются всевозможными произведениями
{ (
)}
(
) (
функций базисных систем p(1) i1 , i2 ,..., im , x(1)
¥
i1 , i2 ,..., im = 0
{ (
)}
¥
и p( 2) im +1 ,..., in , x( 2)
im+1 ,..., in = 0
, т.е.
)
p ( i1 , i2 , ...,im , im +1 ,..., in , x ) = p(1) i1 , i2 ,..., im , x(1) p( 2 ) im +1 ,..., in , x( 2 ) .
( )
Рассмотрим линейный функционал W(1) , заданный на пространстве L2 W(1) . Тогда в
(
)
выражении W(1) h x(1) , x( 2) координаты x( 2) играют роль числовых параметров.
( )
Теорема 2. Пусть W(1) – линейный функционал, определенный на пространстве L2 W(1) ,
(
)
(
)
( )
почти всюду на W( 2) , W(1) ( 0, m )
W(1) ,
определенная
h x(1) , x( 2 ) Î L2 ( W ) , h x(1) , x( 2) Î L2 W(1)
характеристика
функционала
{ (
p(1) i1 , i2 ,..., im , x(1)
определенная
)}
¥
i1 , i2 ,..., im = 0
,
относительно
H ( n,0 )
– спектральная
базисной
системы
относительно
базисной
характеристика
функции
{ p ( i , i ,..., i , x )}
¥
1
2
n
– спектральная
i1 , i2 ,..., in = 0
,
системы
(
)
h x(1) , x( 2) ,
E ( n - m, n - m )
–
единичная матрица размерности 2 ( n - m ) . Тогда
(
) (
)
S éW(1) h x(1) , x( 2 ) ù = W(1) ( 0, m ) Ä E ( n - m, n - m ) × H ( n,0 ) ,
ë
û
(4)
( )
(
где спектральное преобразование применяется к функции h( 2) x( 2) = W(1) h x(1) , x( 2)
{ (
базисной системы p( 2) im +1 ,..., in , x( 2)
)}
)
относительно
¥
im+1 ,..., in = 0
.
Доказательство. Из теоремы 1 следует, что
( )
(
где H ( ) ( m,0; x( ) )
)
(
)
h( 2) x( 2) = W(1) h x(1) , x( 2 ) = W(1) ( 0, m ) × H (1) m,0; x( 2 ) ,
1
2
(
– спектральная характеристика функции h x(1) , x( 2)
{ (
определенная относительно базисной системы p(1) i1 , i2 ,..., im , x(1)
( )
и H i1i2 ...im x( 2)
)
при фиксированном x( 2) ,
)}
¥
i1 , i2 ,..., im = 0
(
. Обозначим через Wi1i2 ...im
элементы спектральных характеристик W(1) ( 0, m ) и H (1) m,0; x( 2 )
)
соответственно.
Тогда
( )
h( 2) x( 2 ) =
¥
å
i1 ,i2 ,...,im = 0
( )
Wi1i2 ...im × H i1i2 ...im x( 2 ) .
( )
Найдем элементы спектральной характеристики функции h( 2) x( 2 )
относительно базисной
{ (
системы p( 2) im +1 ,..., in , x( 2)
( (
)}
¥
im+1 ,..., in = 0
)
:
( ))
H im+1 ...in = p( 2) im +1 ,..., in , x( 2) , h( 2 ) x( 2 )
¥
å
=
i1 ,i2 ,...,im = 0
( (
¥
æ
ö
= ç p( 2) im +1 ,..., in , x( 2 ) , å Wi1i2 ...im × H i1i2 ...im x( 2 ) ÷
=
L2 ( W( 2 ) )
i1 ,i2 ,...,im = 0
è
ø L2 ( W(2) )
(
( ))
)
Wi1i2 ...im × p( 2) im +1 ,..., in , x( 2) , H i1i2 ...im x( 2 )
)
(
L2 W( 2)
)
( )
¥
å
=
i1 , i2 ,...,im = 0
Wi1i2 ...im × H i1i2 ...in ,
im +1 ,..., in = 0,1, 2,...,
где
( (
( ))
)
H i1i2 ...in = p( 2) im +1 ,..., in , x( 2) , H i1i2 ...im x( 2)
числа
(
L2 W( 2 )
представляют
)
собой
элементы
спектральной характеристики H ( n,0 ) .
Формулу для вычисления H im+1 ...in можно переписать следующим образом:
H im+1 ...in =
¥
å
j1 , j2 ,..., jn = 0
W%im+1 ...in j1 j2 ... jn × H j1 j2 ... jn ,
im +1 ,..., in = 0,1, 2,... ,
где упорядоченная совокупность чисел
ìïW j j ... j , im +1 = jm +1 , ..., in = jn ,
W%im+1 ...in j1 j2 ... jn = í 1 2 m
ïî0, в остальных случаях
образует многомерную матрицу W% ( n - m, n ) .
Следовательно, по определению произведения и тензорного произведения многомерных
( )
матриц получаем выражение для спектральной характеристики функции h( 2) x( 2 ) :
( )
S é h( 2) x( 2) ù = W% ( n - m, n ) × H ( n,0 ) ,
ë
û
где W% ( n - m, n ) = W(1) ( 0, m ) Ä E ( n - m, n - m ) . Отсюда следует формула (4).
<
Замечание. Аналогичное утверждение можно сформулировать в случае, если x(1) и x( 2)
образуются другим способом. Например,
x(1) = [ x1
x3
x5 ... xn -1 ] , x( 2) = [ x2
T
x4
x(1) = [ xm +1 ... xn ] ,
T
x( 2) = [ x1
x2 ... xm ] , или
T
x6 ... xn ] , если n – четное; и т.п.
T
Переход от спектральной характеристики
(
)
H ( 2) ( n - m,0 ) = S éW(1) h x(1) , x( 2) ù
ë
û
к функции
( )
h( 2) x( 2 ) осуществляется по формуле обращения:
( )
h( 2) x( 2) = S -1 éë H ( 2) ( n - m, 0 ) ùû =
¥
å
im+1 ,...,in = 0
(
)
H im+1 ...in × p( 2) im +1 ,..., in , x( 2) ,
(5)
где H im+1 ...in – элементы спектральной характеристики H ( 2) ( n - m,0 ) , x( 2) Î W( 2) .
Пример 2.
h2 ( x2 ) =
Запишем
ò h ( x , x ) dx
1
2
и h1 ( x1 ) =
1
W1
{ p ( i , x )}
¥
Пусть
1
1
1
выражение
i1 = 0
для
ò h ( x , x ) dx
1
2
2
W2
спектральных
характеристик
функций
, где h ( x1 , x2 ) Î L2 ( W1 ´ W 2 ) , W1 , W 2 Í R .
– базис пространства L2 ( W1 ) , а
{ p ( i , x )}
¥
2
2
2
i2 = 0
– базис пространства
L2 ( W 2 ) . Положим x(1) = x1 , x( 2) = x2 и рассмотрим линейный функционал J 1 , определенный на
пространстве L2 ( W1 ) и ставящий в соответствие функции f1 ( x1 ) Î L2 ( W1 ) интеграл от этой
функции по множеству W1 , т.е. J 1 f1 ( x1 ) =
ò f ( x ) dx
1
W1
1
1
. Нетрудно видеть, что h2 ( x2 ) = J 1h ( x1 , x2 )
при фиксированном x2 . Тогда из теоремы 2 следует, что спектральная характеристика функции
h2 ( x2 ) , определенная относительно базисной системы
{ p ( i , x )}
¥
2
2
2
i2 = 0
, выражается следующим
образом:
é
ù
H 2 (1,0 ) = S éë h2 ( x2 ) ùû = S ê ò h ( x1 , x2 ) dx1 ú = ( J1 ( 0,1) Ä E (1,1) ) × H ( 2,0 ) ,
êë W1
úû
где J1 ( 0,1) – спектральная характеристика функционала J 1 , определенная относительно базисной
системы
{ p ( i , x )}
¥
1
1
1
характеристика
i1 = 0
¥
1
1
2
2
h ( x1 , x2 ) ,
функции
{ p ( i , x ) p ( i , x )}
1
, E (1,1) – двумерная единичная матрица,
2
i1 , i2 = 0
определенная
H ( 2,0 )
относительно
– спектральная
базисной
системы
.
Переход от спектральной характеристики H 2 (1,0 ) к функции h2 ( x2 ) осуществляется по
формуле (5), которая в рассматриваемом примере примет вид:
¥
-1
ò h ( x1 , x2 ) dx1 = S éë H 2 (1, 0 )ùû = å H i¢¢2 × p2 (i2 , x2 ) ,
i2 = 0
W1
где H i¢¢2 – элементы спектральной характеристики H 2 (1,0 ) , x2 Î W 2 .
Теперь предположим, что x(1) = x2 , а x( 2) = x1 . Проводя аналогичные рассуждения, получаем
выражение для спектральной характеристики функции h1 ( x1 ) , определенной относительно
базисной системы { p1 ( i1 , x1 )}i1 = 0 :
¥
é
ù
H1 (1,0 ) = S éë h1 ( x1 ) ùû = S ê ò h ( x1 , x2 ) dx2 ú = ( E (1,1) Ä J 2 ( 0,1) ) × H ( 2,0 ) ,
ëê W2
ûú
где
J 2 ( 0,1)
J 2 , заданного на
– спектральная характеристика линейного функционала
пространстве L2 ( W 2 ) и ставящего в соответствие функции f 2 ( x2 ) Î L2 ( W2 ) интеграл от этой
функции по множеству W 2 , т.е
J 2 f 2 ( x2 ) =
ò f ( x ) dx
2
2
2
W2
. Спектральная характеристика J 2 ( 0,1)
определена относительно базисной системы { p2 ( i2 , x2 )}i2 = 0 .
¥
Формула обращения для спектральной характеристики H1 (1,0 ) функции h1 ( x1 ) имеет вид:
ò
W2
¥
h ( x1 , x2 ) dx2 = S -1 éë H1 (1, 0 ) ùû = å H i¢1 × p1 ( i1 , x1 ) ,
i1 = 0
где H i¢1 – элементы спектральной характеристики H1 (1,0 ) , x1 Î W1 .
<
Рассмотрим линейные функционалы, заданные на множестве функций времени t и вектора x
в предположении, что переменная времени играет роль параметра.
Будем предполагать, что функции базисной системы
{e ( i , i ,..., i , t , x )}
¥
0
1
n
i0 , i1 ,..., in = 0
пространства
L2 (T ´ W ) , где T Í [ 0, +¥ ) – промежуток времени, порождаются всевозможными произведениями
функций систем {q ( i0 , t )}i0 = 0 и { p ( i1 , i2 ,..., in , x )}i1 , i2 ,..., in = 0 , которые в свою очередь являются базисами
¥
¥
пространств L2 (T ) и L2 ( W ) соответственно, т.е. e ( i0 , i1 ,..., in , t , x ) = q ( i0 , t ) p ( i1 ,..., in , x ) .
Теорема 3. Пусть W – линейный функционал, определенный на пространстве L2 ( W ) ,
h ( t , x ) Î L2 (T ´ W ) , h ( t , x ) Î L2 ( W ) почти всюду на T , W ( 0, n ) – спектральная характеристика
функционала
W , определенная
относительно базисной системы
{ p ( i , i ,..., i , x )}
¥
1
2
n
i1 , i2 ,..., in = 0
,
H ( n + 1,0 ) – спектральная характеристика функции h ( t , x ) , определенная относительно базисной
системы {e ( i0 , i1 ,..., in , t , x )}i0 , i1 ,..., in = 0 . Тогда
¥
S éëW h ( t , x ) ùû = ( E (1,1) Ä W ( 0, n ) ) × H ( n + 1,0 ) ,
(6)
где спектральное преобразование применяется к функции h0 ( t ) = W h ( t , x ) относительно базисной
системы {q ( i0 , t )}i0 = 0 .
¥
Доказательство проводится так же, как и доказательство теоремы 2.
Запишем формулу обращения для спектральной характеристики H 0 (1,0 ) = S éë W h ( t , x ) ùû
функции h0 ( t ) = W h ( t , x ) :
¥
h0 ( t ) = S -1 éë H 0 (1, 0 ) ùû = å H i0 × q ( i0 , t ) ,
(7)
i0 = 0
где H i0 – элементы спектральной характеристики H 0 (1,0 ) , t Î T .
Пример 3. Запишем выражение для спектральной характеристики функции времени
h0 ( t ) =
ò ò h ( t , x , x ) dx dx
1
2
1
, где h ( t , x1 , x2 ) Î L2 (T ´ W1 ´ W 2 ) , W1 , W 2 Í R .
2
W1 W 2
Пусть {q ( i0 , t )}i0 = 0 – базис пространства L2 (T ) , а { p1 ( i1 , x1 ) p2 ( i2 , x2 )}i1 , i2 = 0 – базис пространства
¥
¥
L2 ( W1 ´ W 2 ) . Тогда, по теореме 3, получаем искомую спектральную характеристику в виде
é
ù
H 0 (1,0 ) = S éë h0 ( t ) ùû = S ê ò ò h ( t , x1 , x2 ) dx1dx2 ú = ( E (1,1) Ä J ( 0,2 ) ) × H ( 3,0 ) ,
ëê W1 W2
ûú
где H ( 3,0 ) – спектральная характеристика функции h ( t , x1 , x2 ) , определенная относительно
{q ( i , t ) p ( i , x ) p ( i , x )}
¥
базисной системы
0
1
1
1
2
2
2
i0 , i1 , i2 = 0
,
J ( 0,2 )
– спектральная характеристика
линейного функционала J , заданного на пространстве L2 ( W1 ´ W 2 ) и ставящего в соответствие
f ( x1 , x2 ) Î L2 ( W1 ´ W 2 )
функции
J f ( x1 , x2 ) =
ò ò f ( x , x ) dx dx
1
2
W1 W 2
1
2
W1 ´ W 2 , т.е.
интеграл от этой функции по множеству
. Спектральная характеристика J ( 0,2 ) определена относительно
базисной системы { p1 ( i1 , x1 ) p2 ( i2 , x2 )}i1 , i2 = 0 .
¥
Напомним, что J ( 0,2 ) = éëW ( 2,0 ) ùû , где W ( 2,0 ) – спектральная характеристика функции
T
w ( x1 , x2 ) = 1 , определенная относительно базисной системы { p1 ( i1 , x1 ) p2 ( i2 , x2 )}i , i
¥
1 2
=0
.
Для перехода от спектральной характеристики H 0 (1,0 ) к соответствующей функции времени
применяется формула обращения (7).
<
Сформулируем важное следствие из теорем 2 и 3. Пусть функции базисной системы
{e ( i , i ,..., i , t , x )}
¥
0
1
n
i0 ,i1 ,..., in = 0
порождаются всевозможными произведениями функций базисных систем
¥
,
i0 = 0
0
{ p (i , i ,...,i , x )}
¥
{q ( i , t )}
(1)
1
2
m
(1)
i1 , i2 ,..., im = 0
и
{ p (i
( 2)
m +1
,..., in , x( 2)
( )
)}
¥
im+1 ,..., in = 0
(
( )
пространств L2 (T ) , L2 W(1)
) (
)
и L2 W( 2) , т.е. e ( i0 , i1 ,..., im , im +1 ,..., in , t , x ) = q ( i0 , t ) p(1) i1 ,..., im , x(1) p( 2 ) im +1 ,..., in , x( 2 ) . Пусть также
( )
W(1) – линейный функционал, заданный на пространстве L2 W(1) . Будем предполагать, что в
(
)
(
выражении h( 2) t , x( 2) = W(1) h t , x(1) , x( 2 )
)
переменная времени t и координаты x( 2) играют роль
(
)
числовых параметров. Функцию h ( t , x ) будем записывать в виде h t , x(1) , x( 2 ) .
Теорема 4. Пусть W(1) ( 0, m ) – спектральная характеристика функционала W(1) , определенная
{ p (i , i ,..., i , x )}
(
¥
относительно
(
)
базисной
( )
h t , x(1) , x( 2) Î L2 W(1)
(
системы
(1)
1
2
(1)
m
i1 , i2 ,..., im = 0
)
h t , x(1) , x( 2) Î L2 (T ´ W ) ,
,
почти всюду на T ´ W( 2) , H ( n + 1,0 ) – спектральная характеристика
)
функции h t , x(1) , x( 2) , определенная относительно базисной системы
{e ( i , i ,..., i , t , x )}
¥
0
1
n
i0 , i1 ,..., in = 0
.
Тогда
(
) (
)
S éW(1) h t , x(1) , x( 2) ù = E (1,1) Ä W(1) ( 0, m ) Ä E ( n - m, n - m ) × H ( n + 1,0 ) ,
ë
û
где
спектральное
преобразование
применяется
{
(
к
относительно базисной системы q ( i0 , t ) p( 2) im +1 ,..., in , x( 2 )
функции
)}
(8)
(
)
(
h( 2) t , x( 2) = W(1) h t , x(1) , x( 2 )
)
¥
i0 , im +1 ,..., in = 0
.
Доказательство этой теоремы проводится аналогично доказательству теоремы 2.
(
)
Переход от спектральной характеристики H ( 2) ( n - m + 1,0 ) = S éë W(1) h t , x(1) , x( 2) ùû к функции
(
)
(
)
h( 2) t , x( 2) осуществляется по формуле обращения:
h( 2) t , x( 2 ) = S -1 éë H ( 2) ( n - m + 1, 0 ) ùû =
¥
å
i0 , im+1 ,..., in = 0
(
)
H i0im+1 ...in × q ( i0 , t ) × p( 2 ) im +1 ,..., in , x( 2 ) ,
(9)
где H i0im+1 ...in – элементы спектральной характеристики H ( 2) ( n - m + 1,0 ) , t Î T , x( 2) Î W( 2) .
Замечание. Следует отметить, что в общем случае x(1) и x( 2) могут формироваться
произвольным образом из координат вектора x .
Пример 4.
Найдем
выражения
для
спектральных
характеристик
функций
h2 ( t , x2 ) =
ò h ( t , x , x ) dx
1
2
1
W1
Пусть
{q ( i , t )}
¥
0
i0 = 0
и h1 ( t , x1 ) =
ò h ( t , x , x ) dx
1
2
W2
2
, где h ( t , x1 , x2 ) Î L2 (T ´ W1 ´ W2 ) , W1 , W 2 Í R .
{ p ( i , x )}
¥
– базис пространства L2 (T ) , а
1
1
1
i1 = 0
и
{ p ( i , x )}
¥
2
2
2
i2 = 0
– базисы
пространств L2 ( W1 ) и L2 ( W 2 ) соответственно. Тогда, используя результаты, полученные в
примере 2 и утверждение теоремы 4, запишем искомые выражения для спектральных
характеристик:
é
ù
H 2 ( 2,0 ) = S éë h2 ( t , x2 ) ùû = S ê ò h ( t , x1 , x2 ) dx1 ú = ( E (1,1) Ä J1 ( 0,1) Ä E (1,1) ) × H ( 3,0 ) ,
êë W1
úû
é
ù
H1 ( 2,0 ) = S éë h1 ( t , x1 ) ùû = S ê ò h ( t , x1 , x2 ) dx2 ú = ( E (1,1) Ä E (1,1) Ä J 2 ( 0,1) ) × H ( 3,0 ) ,
ëê W2
ûú
где J1 ( 0,1) и J 2 ( 0,1) – спектральные характеристики функционалов J
относительно базисных систем
{ p ( i , x )}
¥
1
1
1
i1 = 0
и
{ p ( i , x )}
¥
2
2
2
i2 = 0
1
и J 2 , определенные
соответственно (см. пример 2),
H ( 3,0 ) – спектральная характеристика функции h ( t , x1 , x2 ) , определенная относительно базисной
системы {q ( i0 , t ) p1 ( i1 , x1 ) p2 ( i2 , x2 )}i0 ,i1 ,i2 = 0 .
¥
Для перехода от спектральных характеристик H 2 ( 2,0 ) и H1 ( 2,0 ) к соответствующим
функциям применим формулу (9), тогда
-1
ò h ( t , x1 , x2 ) dx1 = S éë H 2 ( 2, 0 )ùû =
W1
ò
W2
h ( t , x1 , x2 ) dx2 = S -1 éë H1 ( 2,0 ) ùû =
¥
å
i0 ,i2 = 0
H i¢¢0i2 × q ( i0 , t ) × p2 ( i2 , x2 ) ,
¥
å H¢
i0 ,i1 = 0
i0i1
× q ( i0 , t ) × p1 ( i1 , x1 ) ,
где H i¢¢0i2 и H i¢0i1 – элементы спектральных характеристик H 2 ( 2,0 ) и H1 ( 2,0 ) соответственно, t Î T
, x1 Î W1 , x2 Î W 2 .
<
Вычисление моментных характеристик вектора состояния стохастических систем
Рассмотрим задачу вычисления моментных характеристик вектора состояния стохастических
систем
управления
с
фиксированной
структурой
[14,15]
по
известной
спектральной
характеристике плотности вероятности вектора состояния.
Пусть f ( t , x ) – плотность вероятности вектора состояния, тогда математическое ожидание
m ( t ) и ковариационная матрица R ( t ) определяются следующим образом:
m ( t ) = éë m1 ( t ) m2 ( t ) L mn ( t ) ùû ,
T
é R11 ( t ) R12 ( t )
ê
R ( t ) R22 ( t )
R ( t ) = ê 21
ê M
M
ê
ëê Rn1 ( t ) Rn 2 ( t )
L R1n ( t ) ù
ú
L R2 n ( t ) ú
,
O
M ú
ú
L Rnn ( t ) úû
где
n – размерность вектора состояния,
mi ( t ) =
ò x f ( t , x ) dx ,
(10)
i
Rn
Rij ( t ) =
ò x x f ( t , x ) dx - m ( t ) m (t ) ,
i
j
i
(11)
j
Rn
i, j = 1, 2,..., n .
Операцию вычисления математического ожидания можно рассматривать как линейный
функционал J
(см. примеры линейных функционалов), заданный на пространстве функций
времени и вектора состояния при условии, что переменная времени t фиксирована, W = R n .
Перейдем к определению функций mi ( t ) и Rij ( t ) с использованием спектральной формы
математического описания. Пусть M i (1,0 ) – спектральная характеристика функции mi ( t ) ,
определенная относительно базисной системы
{q ( i , t )}
¥
0
i0 = 0
пространства L2 (T ) , J ( 0, n ) –
спектральная характеристика функционала J , X i ( n, n ) – спектральная характеристика оператора
умножения на функцию ai ( x ) = xi (нестационарная передаточная функция усилительного звена с
коэффициентом передачи ai ( x ) = xi ); спектральные характеристики J ( 0, n ) , X i ( n, n ) определены
относительно базисной системы
спектральная
характеристика
относительно
базисной
n
пространства L2 ( R ) , F ( n + 1,0 ) –
{ p ( i , i ,..., i , x )}
¥
1
2
n
плотности
системы
i1 , i2 ,..., in = 0
вероятности
вектора
состояния,
{e ( i , i ,..., i , t , x ) = q (i , t ) p (i ,..., i , x )}
¥
0
1
n
0
1
n
i0 , i1 ,..., in = 0
определенная
пространства
L2 (T ´ R n ) , E (1,1) – двумерная единичная матрица. Тогда по теореме 3 и свойству спектрального
преобразования произведения функций [4,5] имеем
M i (1,0 ) = ( E (1,1) Ä J ( 0, n ) ) × ( E (1,1) Ä X i ( n, n ) ) × F ( n + 1,0 ) ,
(12)
i = 1,2,..., n ,
так как спектральная характеристика подынтегральной функции в выражении (10) равна
( E (1,1) Ä X ( n, n ) ) × F ( n + 1,0 ) .
i
Запишем выражение для представления функции Rij ( t ) . По аналогии со спектральной
характеристикой функции mi ( t ) получаем, что
é
ù
S ê ò xi x jf ( t , x ) dx ú = ( E (1,1) Ä J ( 0, n ) ) × ( E (1,1) Ä X ij ( n, n ) ) × F ( n + 1,0 ) ,
êë R n
úû
где X ij ( n, n ) = X i ( n, n ) × X j ( n, n ) – спектральная характеристика оператора умножения на функцию
aij ( x ) = xi x j . По свойству спектрального преобразования произведения функций времени [5]
S éë mi ( t ) m j ( t ) ùû = M i (1,1) × M j (1,0 ) , где
M i (1,1)
–
спектральная
характеристика
умножения на функцию mi ( t ) , определенная относительно базисной системы
оператора
{q ( i , t )}
¥
0
i0 = 0
, а
M j (1,0 ) – спектральная характеристика функции m j ( t ) , причем спектральную характеристику
M i (1,1) можно найти по известной спектральной характеристике M i (1,0 ) [4,5]:
M i (1,1) = V (1, 2 ) e M i (1,0 ) ,
где V (1,2 ) – спектральная характеристика множительного звена (трехмерная нестационарная
передаточная функция множительного звена), определенная относительно базисной системы
{q ( i , t )}
¥
0
i0 = 0
. Следовательно, спектральная характеристика Rij (1,0 ) функции Rij ( t ) определяется
соотношением
Rij (1,0 ) = ( E (1,1) Ä J ( 0, n ) ) × ( E (1,1) Ä X ij ( n, n ) ) × F ( n + 1,0 ) - (V (1,2 ) e M i (1,0 ) ) × M j (1,0 ) ,
(13)
i, j = 1,2,..., n .
Спектральные характеристики функций mi ( t ) и Rij ( t ) можно найти другим способом.
Определим линейные функционалы M xi и M xi x j на пространстве L2 ( W ) :
M xi h ( x ) = ò xi h ( x ) dx ,
W
M xi x j h ( x ) = ò xi x j h ( x ) dx ,
h ( x ) Î L2 ( W ) ,
W
T
тогда M i ( 0, n ) = S éë M xi ùû = éë X i ( n,0 ) ùû , M ij ( 0, n ) = S éëM xi x j ùû = éë X ij ( n,0 ) ùû , где X i ( n, 0 ) и X ij ( n, 0 ) –
T
спектральные характеристики функций ai ( x ) = xi и aij ( x ) = xi x j соответственно, определенные
относительно базисной системы { p ( i1 , i2 ,..., in , x )}i ,i
¥
1 2
,..., in = 0
пространства L2 ( W ) . Следовательно, если
W = R n , то по теореме 3, свойству линейности спектрального преобразования и свойству
спектрального преобразования произведения функций времени
M i (1, 0 ) = ( E (1,1) Ä M i ( 0, n ) ) × F ( n + 1, 0 ) ,
(14)
Rij (1,0 ) = ( E (1,1) Ä M ij ( 0, n ) ) × F ( n + 1,0 ) - (V (1,2 ) e M i (1,0 ) ) × M j (1,0 ) ,
(15)
i, j = 1,2,..., n .
Покажем, что соотношения (12) и (14) эквивалентны. Для этого преобразуем выражение
( E (1,1) Ä J ( 0, n ) ) × ( E (1,1) Ä X ( n, n ) ) ,
i
используя
свойства
операций
над
многомерными
матрицами [12]:
( E (1,1) Ä J ( 0, n ) ) × ( E (1,1) Ä X ( n, n ) ) = ( E (1,1) × E (1,1) ) Ä ( J ( 0, n ) × X ( n, n ) ) =
i
i
(
= E (1,1) Ä éë J ( 0, n ) × X i ( n, n ) ùû
)
T T
(
= E (1,1) Ä éë X i ( n, n ) ùû × éë J ( 0, n )ùû
T
).
T T
Известно [4,5], что спектральные характеристики операторов умножения представляют собой
éë X i ( n, n ) ùû = X i ( n, n ) . Кроме того,
J ( 0, n ) = éëW ( n, 0 ) ùû
T
симметрические матрицы, т.е.
T
и,
следовательно, éë J ( 0, n ) ùû = W ( n, 0 ) , где W ( n, 0 ) – спектральная характеристика функции w ( x ) = 1
T
,
определенная
(
относительно
E (1,1) Ä éë X i ( n, n ) ùû × éë J ( 0, n ) ùû
T
)
T T
базисной
{ p ( i , i ,..., i , x )}
¥
системы
1
= E (1,1) Ä ( X i ( n, n ) ×W ( n, 0 ) ) .
T
2
По
n
i1 , i2 ,..., in = 0
свойству
,
поэтому
спектрального
преобразования произведения функций [4,5] X i ( n, n ) ×W ( n, 0 ) = X i ( n, 0 ) . Таким образом,
E (1,1) Ä ( X i ( n, n ) × W ( n, 0 ) ) = E (1,1) Ä éë X i ( n, 0 )ùû = E (1,1) Ä M i ( 0, n ) ,
T
т.е.
T
( E (1,1) Ä J ( 0, n ) ) × ( E (1,1) Ä X ( n, n ) ) = E (1,1) Ä M ( 0, n ) ,
i
i
из чего следует эквивалентность
соотношений (12) и (14). Эквивалентность соотношений (13) и (15) доказывается аналогично.
Переход от спектральных характеристик M i (1,0 ) и Rij (1,0 ) к соответствующим функциям
времени осуществляется по формуле (7):
¥
mi ( t ) = S -1 éë M i (1, 0 ) ùû = å M i ;i0 × q ( i0 , t ) ,
(16)
i0 = 0
¥
Rij ( t ) = S -1 éë Rij (1,0 ) ùû = å Rij ;i0 × q ( i0 , t ) ,
(17)
i0 = 0
где M i ;i0 и Rij ;i0 – элементы спектральных характеристик M i (1,0 ) и Rij (1,0 ) соответственно, t Î T ,
i, j = 1,2,..., n .
Замечание. В одномерном случае
( n = 1)
функция
R (t )
называется дисперсией и
обозначается D ( t ) . Спектральную характеристику функции D ( t ) будем обозначать D (1,0 ) .
Пример 5. Запишем выражения для спектральных характеристик математического ожидания
и дисперсии состояния одномерной стохастической системы.
Формулы (10) и (11) для одномерной стохастической системы примут вид:
m ( t ) = ò xf ( t , x ) dx ,
D ( t ) = ò x 2f ( t , x ) dx - m 2 ( t ) .
R
Для
R
получения
искомых
полученными выше. Пусть
спектральных
{q ( i , t )}
¥
0
i0 = 0
характеристик
воспользуемся
результатами,
– базис пространства L2 (T ) , V (1,2 ) – спектральная
характеристика множительного звена, определенная относительно этой базисной системы;
{ p ( i , x )}
¥
1
i1 = 0
– базис пространства L2 ( R ) , а J ( 0,1) и X (1,1) – спектральные характеристики
функционала J
и оператора умножения функцию a ( x ) = x соответственно, определенные
относительно базисной системы
{ p ( i , x )}
¥
1
i1 = 0
; F ( 2,0 ) – спектральная характеристика плотности
вероятности состояния, т.е. функции f ( t , x ) , определенная относительно базисной системы
{q ( i , t ) p ( i , x )}
¥
0
1
i0 , i1 = 0
. Тогда спектральные характеристики M (1,0 ) и D (1,0 ) функций m ( t ) и D ( t )
соответственно выражаются следующим образом:
M (1,0 ) = ( E (1,1) Ä J ( 0,1) ) × ( E (1,1) Ä X (1,1) ) × F ( 2,0 ) ,
D (1, 0 ) = ( E (1,1) Ä J ( 0,1) ) × ( E (1,1) Ä X 2 (1,1) ) × F ( 2, 0 ) - (V (1, 2 ) Ä M (1,0 ) ) × M (1, 0 ) .
Переход от спектральных характеристик M (1,0 ) и D (1,0 ) к соответствующим функциям
времени осуществляется по формулам (16) и (17).
<
Замечание. Используя понятие спектральных характеристик линейных функционалов, можно
получить соотношения, аналогичные (12) и (13) (или (14) и (15)), для определения начальных и
центральных моментов любого порядка по известной спектральной характеристике плотности
вероятности.
Перейдем к определению спектральных характеристик математического ожидания и
ковариационной матрицы вектора состояния для систем со случайными изменениями
<k >
структуры [16–18]. Пусть f ( t , x ) – ненормированная плотность вероятности вектора состояния
[16–18] для структуры с номером k , N – число структур системы. Тогда координаты вектора
m ( t ) и элементы матрицы R ( t ) выражаются следующим образом [17]:
N æ
m< k > ( t ) m< k > ( t ) ö
Rij ( t ) = å ç Rij< k > ( t ) + i < k > j
÷÷ - mi ( t ) m j ( t ) ,
ç
P (t )
k =1 è
ø
N
mi ( t ) = å mi< k > ( t ) ,
k =1
где n
– размерность вектора состояния, а функции
mi< k > ( t )
и
i, j = 1,2,..., n ,
Rij< k > ( t )
(18)
определяются
соотношениями
mi< k > ( t ) =
ò x f (t , x ) dx ,
<k >
(19)
i
Rn
<k >
ij
R
( t ) = ò xi x jf
R
<k >
( t , x ) dx -
mi< k > ( t ) m <j k > ( t )
P < k > (t )
n
i, j = 1,2,..., n ,
,
(20)
k = 1, 2,..., N ;
P < k > ( t ) – вероятность работы структуры с номером k :
P <k > (t ) =
ò f ( t , x ) dx .
<k >
(21)
Rn
<k >
<k >
Наряду с ненормированными плотностями вероятности f ( t , x ) , функциями mi ( t ) и
Rij< k > ( t ) будем рассматривать нормированные плотности
f <k > (t, x )
f% < k > ( t , x ) = < k >
=
P (t )
и моментные характеристики
m% i< k > ( t ) =
mi< k > ( t )
<k >
%
ò xif ( t , x ) dx = P < k > ( t ) ,
Rn
(22)
R%ij< k > ( t ) =
Rij< k > ( t )
<k >
<k >
<k >
%
ò xi x jf ( t , x ) dx - m% i ( t ) m% j ( t ) = P < k > ( t ) ,
Rn
(23)
i, j = 1,2,..., n ,
k = 1, 2,..., N .
<k >
Замечание. Функция f ( t , x ) представляет собой совместную плотность вероятности
f ( t , x, k ) вектора состояния и номера структуры при фиксированном k , а f% < k > ( t , x ) – условная
плотность вероятности f ( t , x | k ) . По принятой в [17] терминологии, будем называть функции
m < k > ( t ) = éë mi< k > ( t ) ùû
n
i =1
n
R% < k > ( t ) = éë R%ij< k > ( t ) ùû
i , j =1
и
R < k > ( t ) = éë Rij< k > ( t ) ùû
n
i , j =1
взвешенными,
а
m% < k > ( t ) = éë m% i< k > ( t ) ùû
n
i =1
и
условными моментными характеристиками.
Спектральные характеристики
M i< k > (1, 0 )
функций
mi< k > ( t )
определяются аналогично
спектральным характеристикам координат математического ожидания вектора состояния
стохастических систем с фиксированной структурой (см. (12)):
M i< k > (1,0 ) = ( E (1,1) Ä J ( 0, n ) ) × ( E (1,1) Ä X i ( n, n ) ) × F < k > ( n + 1,0 ) ,
i = 1,2,..., n ,
(24)
k = 1, 2,..., N ,
<k >
где F ( n + 1,0 ) – спектральная характеристика ненормированной плотности вероятности
f < k > ( t , x ) , определенная относительно базисной системы {e ( i0 , i1 ,..., in , t , x )}i , i ,..., i
¥
0 1
n
=0
.
<k >
Из соотношения (21) и теоремы 3 следует, что спектральная характеристика P (1,0 )
<k >
функции P ( t ) , определенная относительно базисной системы
{q ( i , t )}
¥
0
i0 = 0
, выражается
следующим образом:
P < k > (1,0 ) = ( E (1,1) Ä J ( 0, n ) ) × F< k > ( n + 1,0 ) ,
k = 1, 2,..., N .
(25)
<k >
<k >
Для спектральной характеристики Rij (1,0 ) функции Rij ( t ) справедливо соотношение
Rij< k > (1,0 ) = ( E (1,1) Ä J ( 0, n ) ) × ( E (1,1) Ä X ij ( n, n ) ) × F < k > ( n + 1,0 ) -
(26)
- (V (1,2 ) e P < k > (1,0 ) ) × (V (1, 2 ) e M i< k > (1,0 ) ) × M <j k > (1,0 ) ,
-1
i, j = 1,2,..., n ,
k = 1, 2,..., N .
Данное выражение получено с использованием свойства спектрального преобразования
произведения функций времени [4,5], а именно
é m< k > ( t ) m< k > ( t ) ù
-1
<k >
<k >
<k >
S ê i <k > j
ú = ( P (1,1) ) × M i (1,1) × M j (1,0 ) ,
P (t )
êë
úû
<k >
<k >
где P (1,1) и M i (1,1) – спектральные характеристики операторов умножения на функции
P < k > ( t ) и mi< k > ( t ) соответственно, определенные относительно базисной системы
{q ( i , t )}
¥
0
i0 = 0
,
<k >
<k>
<k >
<k >
<k >
причем P (1,1) = V (1, 2 ) e P (1,0 ) и M i (1,1) = V (1, 2 ) e M i (1,0 ) ; M j (1, 0 ) – спектральная
<k >
характеристика функции m j ( t ) , определенная относительно базисной системы {q ( i0 , t )}i0 = 0 .
¥
<k >
<k >
<k >
<k >
Для спектральных характеристик M% i (1,0 ) и R%ij (1,0 ) функций m% i ( t ) и R%ij ( t )
соответственно справедливы формулы
% < k > ( n + 1, 0 ) ,
M% i< k > (1, 0 ) = ( E (1,1) Ä J ( 0, n ) ) × ( E (1,1) Ä X i ( n, n ) ) ×F
% < k > ( n + 1,0 ) R%ij< k > (1,0 ) = ( E (1,1) Ä J ( 0, n ) ) × ( E (1,1) Ä X ij ( n, n ) ) × F
(
)
- V (1,2 ) e M% i< k > (1,0 ) × M% <j k > (1,0 ) ,
i, j = 1,2,..., n ,
(27)
(28)
k = 1, 2,..., N ,
% < k > ( n + 1, 0 ) – спектральная характеристика функции f% < k > ( t , x ) , определенная относительно
где F
базисной системы {e ( i0 , i1 ,..., in , t , x )}i0 , i1 ,..., in = 0 .
¥
<k >
<k >
Нетрудно показать, что спектральные характеристики функций m% i ( t ) и mi ( t ) , а также
<k >
<k >
функций R%ij ( t ) и Rij ( t ) связаны следующими соотношениями:
-1
M% i< k > (1,0 ) = (V (1,2 ) e P < k > (1,0 ) ) × M i< k > (1,0 ) ,
-1
R%ij< k > (1,0 ) = (V (1,2 ) e P < k > (1,0 ) ) × Rij< k > (1,0 ) ,
i, j = 1,2,..., n ,
k = 1, 2,..., N .
Переход от спектральных характеристик
M i< k > (1,0 ) и Rij< k > (1,0 ) к соответствующим
функциям времени осуществляется по формуле (7):
¥
mi< k > ( t ) = S -1 éë M i< k > (1, 0 ) ùû = å M i<;ik0 > × q ( i0 , t ) ,
i0 = 0
(29)
¥
Rij< k > ( t ) = S -1 éë Rij< k > (1,0 ) ùû = å Rij<;ki0> × q ( i0 , t ) ,
i0 = 0
(30)
<k >
<k >
<k >
<k >
где M i ;i0 и Rij ;i0 – элементы спектральных характеристик M i (1,0 ) и Rij (1,0 ) соответственно,
t Î T , i, j = 1,2,..., n , k = 1, 2,..., N .
<k >
<k >
Формулы обращения спектральных характеристик M% i (1,0 ) и R%ij (1,0 ) аналогичны (29),
(30), а именно
¥
m% i< k > ( t ) = S -1 éë M% i< k > (1, 0 ) ùû = å M% i<;ik0 > × q ( i0 , t ) ,
i0 = 0
(31)
¥
R%ij< k > ( t ) = S -1 éë R%ij< k > (1,0 ) ùû = å R%ij<;ki0> × q ( i0 , t ) ,
i0 = 0
(32)
<k >
<k >
<k >
<k >
где M% i ;i0 и R%ij ;i0 – элементы спектральных характеристик M% i (1, 0 ) и R%ij (1,0 ) соответственно,
t Î T , i, j = 1,2,..., n , k = 1, 2,..., N .
<k >
Запишем формулу обращения для спектральной характеристики P (1,0 ) :
¥
P < k > ( t ) = S -1 éë P < k > (1,0 ) ùû = å Pi0< k > × q ( i0 , t ) ,
i0 = 0
(33)
<k >
<k >
где Pi0 – элементы спектральной характеристики P (1,0 ) , t Î T , k = 1, 2,..., N .
Замечания.
<k >
<k >
1. В одномерном случае функции R ( t ) , R ( t ) и R% ( t ) будем обозначать через D ( t ) ,
D < k > ( t ) и D% < k > ( t ) , а их спектральные характеристики – через D (1,0 ) , D < k > (1,0 ) и D% < k > (1,0 )
соответственно.
2. Формулы
(24), (26)–(28) могут
быть записаны с использованием спектральных
характеристик линейных функционалов M xi и M xi x j (см. (14) и (15)).
3. Как и в случае стохастических систем с фиксированной структурой, можно получить
соотношения для спектральных характеристик начальных и центральных моментов любого
порядка, причем как взвешенных, так и условных.
Определение маргинальных и условных плотностей вероятности
Пусть f ( t , x )
– плотность вероятности вектора состояния стохастической системы
управления, x Î W = R n . Не ограничивая общности, будем рассматривать маргинальную плотность
вероятности
(
) ò f (t, x ) dx( ) ,
f(1) t , x(1) =
(34)
2
R n-m
где 1 £ m < n , x(1) = [ x1
x2 ... xm ] Î R m , x( 2) = [ xm +1 ... xn ] Î R n - m , и условную плотность
T
T
вероятности
(
)
f( 2|1) t , x( 2 ) | x(1) =
f (t, x )
(
f(1) t , x(1)
).
(35)
Будем предполагать, что функции базисной системы
{e ( i , i ,..., i , t , x )}
¥
0
1
n
i0 , i1 ,..., in = 0
пространства
L2 (T ´ R n ) порождаются всевозможными произведениями функций базисных систем {q ( i0 , t )}i = 0 ,
0
¥
{ p (i , i ,..., i , x )}
¥
(1)
1
2
m
(1)
i1 , i2 ,..., im = 0
и
{ p (i
( 2)
m +1
,..., in , x( 2)
)}
¥
im+1 ,..., in = 0
, которые в свою очередь являются
m
n-m
базисами пространств L2 (T ) , L2 ( R ) и L2 ( R ) соответственно. Обозначим через J
( 2)
n-m
линейный функционал, определенный на пространстве L2 ( R ) , который ставит в соответствие
( )
h x( 2) Î L2 ( R n - m )
функции
(
)
f(1) t , x(1) = J
( 2 )f
значение
( t , x ) при фиксированных t
интеграла
ò
R n-m
( )
h x( 2) dx( 2) .
Следовательно,
и x(1) .
Из теоремы 4 и замечания к ней следует, что спектральная характеристика F (1) ( m + 1,0 )
(
)
{
(
функции f(1) t , x(1) , определенная относительно базисной системы q ( i0 , t ) p(1) i1 ,..., im , x(1)
)}
¥
i0 , i1 ,..., im = 0
,
задается следующим выражением:
(
)
F (1) ( m + 1,0 ) = E (1,1) Ä E ( m, m ) Ä J ( 2 ) ( 0, n - m ) × F ( n + 1,0 ) ,
(36)
где E (1,1) – двумерная единичная матрица, E ( m, m ) – единичная матрица размерности 2m ,
J ( 2) ( 0, n - m ) – спектральная характеристика функционала J
базисной системы
{ (
p( 2) im +1 ,..., in , x( 2)
)}
¥
im+1 ,..., in = 0
( 2) ,
определенная относительно
, F ( n + 1,0 ) – спектральная характеристика функции
f ( t , x ) , определенная относительно базисной системы {e ( i0 , i1 ,..., in , t , x )}i , i ,..., i
¥
0 1
n
=0
.
Формула обращения для спектральной характеристики F (1) ( m + 1, 0 ) имеет вид:
(
)
f(1) t , x(1) = S -1 éëF(1) ( m + 1,0 ) ùû =
¥
å
i0 , i1 ,..., im = 0
(
)
F(1) ;i0 ,i1 ,...,im × q ( i0 , t ) × p(1) i1 ,..., im , x(1) ,
(37)
m
где F (1);i0 , i1 ,...,im – элементы спектральной характеристики F (1) ( m + 1,0 ) , t Î T , x(1) Î R .
Перейдем к определению спектральной характеристики условной плотности вероятности
(
)
(
) (
f( 2|1) t , x( 2 ) | x(1) . Перепишем формулу (35) в виде f ( t , x ) = f(1) t , x(1) f( 2|1) t , x( 2 ) | x(1)
)
и применим
спектральное преобразование к левой и правой части полученного выражения. Тогда из свойства
спектрального преобразования произведения функций следует, что
F ( n + 1,0 ) = F (1) ( n + 1, n + 1) × F ( 2|1) ( n + 1,0 ) ,
(
)
где F (1) ( n + 1, n + 1) – спектральная характеристика оператора умножения на функцию f(1) t , x(1) ,
определенная
относительно
базисной
{e ( i , i ,..., i , t , x )}
¥
системы
0
(
1
n
i0 , i1 ,..., in = 0
,
F ( 2|1) ( n + 1,0 )
–
)
спектральная характеристика функции f( 2|1) t , x( 2 ) | x(1) , определенная относительно той же
)
не
F (1) ( n + 1, n + 1) = F (1) ( m + 1, m + 1) Ä E ( n - m, n - m ) ,
где
базисной
системы.
(
f(1) t , x(1)
Функция
зависит
F (1) ( m + 1, m + 1)
(
x( 2) ,
от
–
поэтому
спектральная
)
характеристика оператора умножения на функцию f(1) t , x(1) , определенная относительно
базисной
системы
{q (i , t ) p (i ,..., i , x )}
¥
0
(1)
1
m
(1)
i0 , i1 ,..., im = 0
,
E ( n - m, n - m )
–
единичная
матрица
размерности 2 ( n - m ) . Спектральная характеристика F (1) ( m + 1, m + 1) в свою очередь выражается
через спектральную характеристику F (1) ( m + 1,0 ) [4,5]:
(
)
F (1) ( m + 1, m + 1) = V (1, 2 ) Ä V% ( m, 2m ) e F (1) ( m + 1, 0 ) ,
где V (1,2 ) – спектральная характеристика множительного звена, определенная относительно
¥
базисной системы {q ( i0 , t )}i0 = 0 , а V% ( m, 2m ) – спектральная характеристика множительного звена,
{ (
определенная относительно базисной системы p(1) i1 , i2 ,..., im , x(1)
F ( n + 1,0 ) =
(((V (1,2 ) Ä V% ( m,2m )) e F
(1)
)}
¥
i1 , i2 ,..., im = 0
. Таким образом,
( m + 1,0 ) ) Ä E ( n - m, n - m ) ) × F ( 2|1) ( n + 1,0 )
и, следовательно,
F ( 2|1) ( n + 1,0 ) =
(((V (1,2) Ä V% ( m, 2m )) e F
(1)
( m + 1,0 ) ) Ä E ( n - m, n - m ) )
-1
× F ( n + 1,0 ) .
Учитывая свойства операций над многомерными матрицами, окончательно получаем выражение
для спектральной характеристики условной плотности вероятности:
((
)
F ( 2|1) ( n + 1,0 ) = æç V (1,2 ) Ä V% ( m, 2m ) e F (1) ( m + 1,0 )
è
)
-1
Ä E ( n - m, n - m ) ö÷ × F ( n + 1,0 ) .
ø
(38)
(
Для перехода от спектральной характеристики F ( 2|1) ( n + 1,0 ) к функции f( 2|1) t , x( 2 ) | x(1)
)
применяется формула обращения
(
)
f( 2|1) t , x( 2 ) | x(1) = S -1 éëF ( 2|1) ( n + 1, 0 ) ùû =
¥
å
i0 ,i1 ,...,in = 0
F ( 2|1);i0i1...in × e ( i0 , i1 ,..., in , t , x ),
(39)
m
n-m
где F ( 2|1);i0 i1 ...in – элементы спектральной характеристики F ( 2|1) ( n + 1,0 ) , t Î T , x(1) Î R , x( 2) Î R .
Пример 6. Найдем выражения для спектральных характеристик маргинальной плотности
вероятности f1 ( t , x1 ) и условной плотности вероятности f2|1 ( t , x2 | x1 ) по известной спектральной
характеристике плотности вероятности f ( t , x1 , x2 ) вектора состояния двумерной стохастической
системы.
Пусть
{q ( i , t )}
пространства
f2|1 ( t , x2 | x1 ) =
¥
0
i0 = 0
– базис пространства L2 (T ) , а
L2 ( R ) .
В
рассматриваемом
{ p ( i , x )}
¥
1
1
1
i1 = 0
примере
f ( t , x1 , x2 )
, поэтому соотношения (36) и (38) примут вид:
f1 ( t , x1 )
F1 ( 2,0 ) = ( E (1,1) Ä E (1,1) Ä J 2 ( 0,1) ) × F ( 3,0 ) ,
и
{ p ( i , x )}
¥
2
2
2
i2 = 0
– базисы
f1 ( t , x1 ) = ò f ( t , x1 , x2 ) dx2 ,
R
где F1 ( 2,0 ) – спектральная характеристика функции f1 ( t , x1 ) , определенная относительно
базисной системы {q ( i0 , t ) p1 ( i1 , x1 )}i0 , i1 = 0 , J 2 ( 0,1) – спектральная характеристика функционала J
¥
(см. пример 2), определенная относительно базисной системы
{ p ( i , x )}
¥
2
2
2
i2 = 0
,
F ( 3,0 )
2
–
спектральная характеристика функции f ( t , x1 , x2 ) , определенная относительно базисной системы
{q ( i , t ) p (i , x ) p (i , x )}
¥
0
1
1
F 2|1 ( 3,0 ) =
1
2
2
2
;
i0 , i1 , i2 = 0
(((V (1,2) Ä V% (1,2)) e F ( 2,0))
-1
1
)
Ä E (1,1) × F ( 3,0 ) ,
где F 2|1 ( 3,0 ) – спектральная характеристика функции f2|1 ( t , x2 | x1 ) , определенная относительно
базисной системы
{q ( i , t ) p ( i , x ) p ( i , x )}
¥
0
1
1
1
2
2
2
i0 , i1 , i2 = 0
, V (1,2 )
– спектральная характеристика
множительного звена, определенная относительно базисной системы
{q ( i , t )}
¥
0
i0 = 0
, а V% (1,2 ) –
спектральная характеристика множительного звена, определенная относительно базисной системы
{ p ( i , x )}
¥
1
1
1
i1 = 0
.
Переход от спектральных характеристик F1 ( 2,0 ) и F 2|1 ( 3,0 ) к соответствующим плотностям
вероятности осуществляется по формулам обращения (37), (39):
f1 ( t , x1 ) = S -1 éëF1 ( 2,0 ) ùû =
¥
åF
1; i0 , i1
i0 , i1 = 0
f2|1 ( t , x2 | x1 ) = S -1 éëF 2|1 ( 3,0 ) ùû =
× q ( i0 , t ) × p1 ( i1 , x1 ) ,
¥
å
i0 , i1 , i2 = 0
F 2|1;i0 i1i2 × q ( i0 , t ) × p1 ( i1, x1 ) × p2 ( i2 , x2 ) ,
где F1;i0 , i1 и F 2|1;i0 i1i2 – элементы спектральных характеристик F1 ( 2,0 ) и F 2|1 ( 3,0 ) соответственно,
t Î T , x1 , x2 Î R .
Замечание. Соотношения
<
(34)–(39)
с
точностью
до
обозначений
справедливы
для
маргинальных и условных плотностей вероятности вектора состояния систем управления со
случайными изменениями структуры.
Примеры вероятностного анализа стохастических систем
Приведем примеры вероятностного анализа стохастической системы с фиксированной
структурой и системы со случайными изменениями структуры с использованием спектральной
формы математического описания систем управления.
Замечание. При решении задач анализа и синтеза спектральным методом на вычислительных
машинах можно оперировать
только с конечными матрицами, поэтому спектральные
характеристики функций, линейных операторов и линейных функционалов усекаются по всем
измерениям бесконечного порядка до некоторого порядка L , называемого порядком усечения.
Методика вычисления погрешности расчета, обусловленной усечением матриц, приведена в [3–5].
Пример 7.
Рассмотрим
задачу
вероятностного
анализа
линейной
стационарной
детерминированной системы второго порядка, заданной уравнением X&& + X = 0 , где t Î T = [ 0,2p ] ,
X Î R , с начальным условием X ( 0 ) = X 0 , X& ( 0 ) = X& 0 , причем X 0 и X& 0 – независимые случайные
величины, имеющие гауссовское распределение с математическим ожиданием m = 1 и дисперсией
D =1 2 .
Поскольку начальное условие для рассматриваемой системы является случайной величиной,
решение
X ( t ) представляет собой случайный процесс, следовательно, задача состоит в
нахождении плотности вероятности состояния системы. Отметим, что данная задача относится к
классу задач анализа систем управления ансамблем траекторий [8].
Сделаем замену переменных. Пусть X 1 = X , а X 2 = X& , тогда исходное дифференциальное
уравнение сводится к следующей системе дифференциальных уравнений:
ìï X& 1 = X 2 ,
í&
ïî X 2 = - X 1 ,
начальные условия для которой определяются выражениями X 1 ( 0 ) = X 0 и X 2 ( 0 ) = X& 0 . Эту
систему можно рассматривать как частный случай двумерной стохастической системы с функцией
сноса
éx ù
f ( t , x1 , x2 ) = ê 2 ú
ë - x1 û
и
нулевой
матрицей
диффузии
Следовательно, плотность вероятности f ( t , x1 , x2 ) вектора
[ X1
[14],
X2 ]
T
é0 0ù
g ( t , x1 , x2 ) = ê
ú.
ë0 0û
т.е.
удовлетворяет уравнению
Фоккера-Планка-Колмогорова [14,19]
¶f ( t , x1 , x2 )
¶t
= - x2
¶f ( t , x1 , x2 )
¶x1
+ x1
¶f ( t , x1 , x2 )
с начальным условием f ( 0, x1 , x2 ) =
¶x2
(
)
1
2
2
exp - ( x1 - 1) - ( x2 - 1) и нулевыми краевыми условиями.
p
{
}
Выберем в качестве базисной системы пространства L2 (T ) полиномы Лежандра Pi0 ( t )
[4,5], а для пространства L2 ( R ) – функции Эрмита
{F ( x )}
¥
i1
1
i1 = 0
{
}
и F i2 ( x2 )
¥
i2 = 0
¥
i0 = 0
с параметрами
m=0 и D=
1
[13,15].
2
Пусть P (1,1) – двумерная нестационарная передаточная функция дифференцирующего звена
первого рода, определенная относительно системы полиномов Лежандра [4,5], q (1,0;0 ) – вектор
значений функций этой системы при t = 0 ; P (1,1) – двумерная нестационарная передаточная
функция дифференцирующего звена второго рода, определенная относительно системы функций
Эрмита [13]; F1 ( 3,3) и F2 ( 3,3) – спектральные характеристики операторов умножения на
функции f1 ( t , x1 , x2 ) = x2 и f 2 ( t , x1 , x2 ) = - x1 соответственно, определенные относительно базисной
системы
{P (t ) F ( x ) F ( x )}
¥
i0
i1
1
i2
2
i0 , i1 , i2 = 0
,
F ( 3,0 )
–
спектральная
характеристика
плотности
вероятности f ( t , x1 , x2 ) , определенная относительно той же базисной системы, а F 0 ( 2,0 ) –
спектральная характеристика начальной плотности вероятности
{
}
относительно базисной системы F i1 ( x1 ) F i2 ( x2 )
¥
i1 , i2 = 0
f ( 0, x1 , x2 ) , определенная
. Применяя спектральное преобразование к
левой и правой части уравнения Фоккера-Планка-Колмогорова с учетом начальных и краевых
условий [1,2] и принимая во внимание тот факт, что матрица двумерной нестационарной
передаточной функции дифференцирующего звена второго рода, определенной относительно
системы функций Эрмита, является кососимметрической [13], получаем уравнение обобщенной
характеристической функции [2,3]:
Pt ( 3,3) × F ( 3,0 ) - q (1,0;0 ) Ä F 0 ( 2,0 ) =
= - P1x ( 3,3) × F1 ( 3,3) × F ( 3,0 ) - P2x ( 3,3) × F2 ( 3,3 ) × F ( 3,0 ) ,
где спектральные характеристики операторов дифференцирования первого порядка по времени и
координатам x1 и x2 задаются соотношениями
Pt ( 3,3) = P (1,1) Ä E (1,1) Ä E (1,1) ,
P1x ( 3,3) = E (1,1) Ä P (1,1) Ä E (1,1) ,
P2x ( 3,3) = E (1,1) Ä E (1,1) Ä P (1,1) .
Выражая из полученного уравнения неизвестную спектральную характеристику F ( 3,0 ) ,
получаем следующее выражение:
F ( 3,0 ) = ( P t ( 3,3) + P1x ( 3,3) × F1 ( 3,3 ) + P2x ( 3,3) × F2 ( 3,3 ) ) × ( q (1,0;0 ) Ä F 0 ( 2,0 ) ) .
-1
Так как состоянием исходной системы является координата X 1 , то необходимо найти
маргинальную
плотность
характеристику
F1 ( 2,0 )
вероятности
функции
f1 ( t , x1 ) = ò f ( t , x1 , x2 ) dx2 ,
f1 ( t , x1 )
R
можно
причем
спектральную
через
спектральную
выразить
характеристику F ( 3, 0 ) , используя теорему 4 и результаты, полученные в примере 6. Тогда
F1 ( 2,0 ) = ( E (1,1) Ä E (1,1) Ä J 2 ( 0,1) ) × F ( 3,0 ) ,
где J 2 ( 0,1) – спектральная характеристика функционала J
2
(см. пример 2), определенная
относительно системы функций Эрмита. По формуле обращения получаем, что
f1 ( t , x1 ) = S -1 éëF 2 ( 2,0 ) ùû =
¥
å F¢
i0 , i1 = 0
i0 i1
× Pi0 ( t ) × F i1 ( x1 ) ,
где F¢i0i1 – элементы спектральной характеристики F1 ( 2, 0 ) , t Î T , x1 Î R .
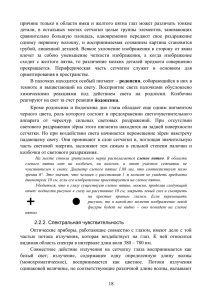
График функции f1 ( t , x1 ) и графики ее сечений при различных значениях переменной
времени t изображены на рис. 1 и 2 соответственно (порядок усечения
спектральных
характеристик равен восьми).
1
t0
t , x1
1
t 3
x
t 2
t2
t
t , x1
2
t
Рис. 1. Плотность вероятности состояния системы.
Рис. 2. Плотность вероятности состояния системы
в различные моменты времени.
Вычислим математическое ожидание состояния системы
m ( t ) = M éë X 1 ( t ) ùû , для этого
воспользуемся результатами, полученными в примере 5:
M (1, 0 ) = ( E (1,1) Ä J1 ( 0,1) ) × ( E (1,1) Ä X 1 (1,1) ) × F1 ( 2, 0 ) ,
где M (1, 0 ) – спектральная характеристика функции m ( t ) , определенная относительно системы
полиномов Лежандра, J1 ( 0,1) – спектральная характеристика функционала J
1
(см. пример 2),
определенная относительно системы функций Эрмита, а X 1 (1,1) – спектральная характеристика
оператора умножения на функцию a ( x1 ) = x1 , также определенная относительно системы функций
Эрмита.
Переход от спектральной характеристики M (1, 0 ) к соответствующей функции времени
осуществляется по формуле (7):
¥
m ( t ) = S -1 éë M (1,0 ) ùû = å M i0 × Pi0 ( t ) ,
i0 = 0
где M i0 – элементы спектральной характеристики M (1, 0 ) , t Î T .
Для проверки точности проведенных расчетов определим функцию m ( t ) другим способом.
&& + m = 0 .
Найдем математическое ожидание левой и правой части уравнения X&& + X = 0 , тогда m
Аналогичным образом можно получить начальные условия, а именно m ( 0 ) = 1 , m& ( 0 ) = 1 .
&& + m = 0 с учетом начальных условий, получаем
Интегрируя дифференциальное уравнение m
выражение для математического ожидания состояния системы:
m ( t ) = cos t + sin t .
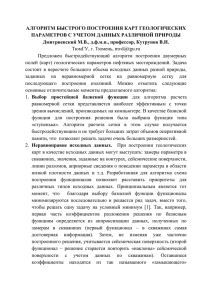
На рис. 3 сплошной линией изображен график математического ожидания, полученного
спектральным методом, а пунктиром – график функции m ( t ) = cos t + sin t . Как видно из
результатов, спектральный метод обеспечивает достаточную точность даже при небольших
порядках усечения спектральных характеристик.
m t
Рис. 3. Математическое ожидание состояния системы.
<
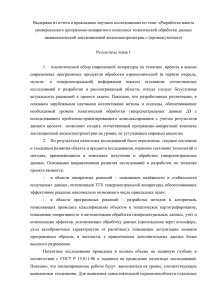
Пример 8. Найдем ненормированные плотности вероятности и моментные характеристики
состояния одномерной системы стабилизации [17]. Первая структура этой системы изображена на
рис. 4.
При выходе координаты X из множества [ -D 0 , D 0 ] возможен срыв стабилизации и переход в
режим поиска (рис. 5), причем интенсивность этого перехода постоянна и равна c1 .
V
k
x0
V
X
x0
k
X
p+1
p+1
Рис. 5. Вторая структура системы стабилизации.
Рис. 4. Первая структура системы стабилизации.
В режиме поиска при попадании координаты X в область [ -D, D ] , где D > D 0 , система может
перейти обратно в первое состояние, таким образом, осуществляется захват сигнала.
Интенсивность захвата также постоянна и равна c2 .
На рис. 4 и 5 используются следующие обозначения: V – стандартный гауссовский белый
шум; k , x , x0 – числовые параметры. Отрезок времени функционирования системы T = [ 0,1] .
Распределение начального состояния X ( 0 ) = X 0 определяется ненормированными плотностями
<1>
<2>
вероятности f0 ( x ) = afN ( x ) , f0 ( x ) = (1 - a ) fN ( x ) , где fN ( x ) – плотность вероятности
стандартной гауссовской случайной величины, 0 £ a £ 1 .
Изменение
состояния
системы
стабилизации
для
первой
структуры
описывается
æ k +1
x ö k
X ( t ) + 0 ÷ + dW (см. рис. 4). Так
стохастическим дифференциальным уравнением dX = ç x ø x
è x
как переход в состояние поиска происходит вне отрезка
[ -D 0 , D0 ]
с интенсивностью c1 , то
(
)
<1>
соответствующая функция поглощения [16–18] имеет вид b12 ( t , x ) = c1 1 - I [-D0 , D0 ] ( x ) f ( t , x ) , где
I [-D0 , D0 ] ( x ) – индикатор множества [ -D 0 , D 0 ] (см. [10]), f <1> ( t , x ) – ненормированная плотность
вероятности состояния для первой структуры.
æ 1
x ö k
Для второй структуры справедливо уравнение dX = ç - X ( t ) + 0 ÷ + dW (см. рис. 5).
x ø x
è x
Функция поглощения, характеризующая обратный переход в состояние захвата, задается
<2>
<2>
формулой b21 ( t , x ) = c2 I [-D , D] ( x )f ( t , x ) , где I [-D , D] ( x ) – индикатор множества [ -D, D ] , f ( t , x ) –
ненормированная плотность вероятности состояния для второй структуры.
<1>
<2>
Ненормированные плотности вероятности f ( t , x ) и f ( t , x ) удовлетворяют системе
обобщенных уравнений Фоккера-Планка-Колмогорова [16–18], которые в рассматриваемом
случае записываются следующим образом:
¶f <1> ( t , x )
¶t
(
1¶
=
x
( ( ( k + 1) x - x )f
0
)
¶x
<1>
(t, x ))
2 <1>
k 2 ¶ f (t, x )
+ 2
2x
¶x 2
- c1 1 - I [ -D0 ,D0 ] ( x ) f <1> ( t , x ) + c2 I [-D ,D ] ( x ) f < 2> ( t , x ) ,
¶f < 2> ( t , x )
¶t
<2>
2 <2>
1 ¶ ( ( x - x0 ) f ( t , x ) ) k 2 ¶ f ( t , x )
=
+ 2
x
¶x
2x
¶x 2
(
)
- c2 I [-D ,D ] ( x ) f < 2> ( t , x ) + c1 1 - I [-D0 ,D0 ] ( x ) f <1> ( t , x ) .
2
Данные уравнения следует интегрировать с начальными условиями f
<1>
a - x2
e ,
( 0, x ) =
2p
2
f
<2>
1 - a - x2
<1>
< 2>
и краевым условием f ( t , x ) x = ±¥ = f ( t , x ) x = ±¥ = 0 .
e
( 0, x ) =
2p
{
}
Выберем в качестве базисной системы пространства L2 (T ) полиномы Лежандра Pi0 ( t )
для пространства L2 ( R ) – функции Эрмита
{F ( x )}
¥
i1
i1 = 0
¥
i0 = 0
,а
с параметрами m = 0 и D = 1 . Пусть
P (1,1) – двумерная нестационарная передаточная функция дифференцирующего звена первого
рода, определенная относительно системы полиномов Лежандра, q (1,0;0 ) – вектор значений
функций этой системы при t = 0 ; P (1,1) – двумерная нестационарная передаточная функция
дифференцирующего звена второго рода, определенная относительно системы функций Эрмита;
X (1,1) , I1 (1,1) и I 2 (1,1) – спектральные характеристики операторов умножения на функции
a ( x ) = x , I [-D0 , D0 ] ( x ) и I [-D , D ] ( x ) соответственно, а F N (1,0 ) – спектральная характеристика
функции fN ( x ) . Спектральные характеристики X (1,1) , I1 (1,1) , I 2 (1,1) и F N (1,0 ) определены
<1>
<2>
относительно системы функций Эрмита; F ( 2,0 ) и F ( 2,0 ) – спектральные характеристики
<1>
<2>
функций f ( t , x ) и f ( t , x ) соответственно, определенные относительно базисной системы
{P ( t ) F ( x )}
¥
i0
i1
i0 , i1 = 0
.
Запишем уравнения обобщенных характеристических функций для рассматриваемой системы
стабилизации [6]:
ìï P t ( 2,2 ) × F <1> ( 2,0 ) - A11 ( 2,2 ) × F <1> ( 2,0 ) - A12 ( 2,2 ) × F < 2 > ( 2,0 ) = q (1,0;0 ) Ä F <01> (1,0 ) ,
í t
<2>
<1>
<2>
<2>
ïî P ( 2,2 ) × F ( 2,0 ) - A21 ( 2,2 ) × F ( 2,0 ) - A22 ( 2,2 ) × F ( 2,0 ) = q (1,0;0 ) Ä F 0 (1,0 ) ,
где
P t ( 2,2 ) = P (1,1) Ä E (1,1) ,
æ
æ k +1
x
öö
A11 ( 2, 2 ) = - ( E (1,1) Ä P (1,1) ) × ç E (1,1) Ä ç X (1,1) + 0 E (1,1) ÷ ÷ +
x
è x
øø
è
2
k
+ 2 ( E (1,1) Ä P 2 (1,1) ) - c1 E (1,1) Ä ( E (1,1) - I1 (1,1) ) ,
2x
(
)
(
A12 ( 2,2 ) = c2 ( E (1,1) Ä I 2 (1,1) ) ,
)
A21 ( 2, 2 ) = c1 E (1,1) Ä ( E (1,1) - I1 (1,1) ) ,
æ
æ 1
öö
x
A11 ( 2, 2 ) = - ( E (1,1) Ä P (1,1) ) × ç E (1,1) Ä ç - X (1,1) + 0 E (1,1) ÷ ÷ +
x
è x
øø
è
k2
+ 2 ( E (1,1) Ä P 2 (1,1) ) - c2 ( E (1,1) Ä I 2 (1,1) ) ,
2x
F <01> (1, 0 ) = aF N (1, 0 ) ,
F <0 2 > (1, 0 ) = (1 - a ) F N (1, 0 ) .
Известно [6], что решение полученной системы уравнений определяется следующим образом:
(
( 2, 2 ) ) × ( q (1,0;0 ) Ä F
)
F <1> ( 2,0 ) = ( Z11 ( 2,2 ) - G1 ( 2,2 ) × Z 21 ( 2,2 ) ) × q (1,0;0 ) Ä F 0<1> (1,0 ) - G1 ( 2,2 ) × ( q (1,0;0 ) Ä F 0< 2 > (1,0 ) ) ,
-1
F < 2 > ( 2,0 ) = ( Z 22 ( 2, 2 ) - G 2 ( 2, 2 ) × Z12
-1
<2>
0
(1,0 ) - G2 ( 2,2 ) × ( q (1,0;0 ) Ä F 0<1> (1,0 ) ) ),
где
Z11 ( 2, 2 ) = P t ( 2,2 ) - A11 ( 2,2 ) ,
Z12 ( 2, 2 ) = - A12 ( 2,2 ) ,
Z 21 ( 2,2 ) = - A21 ( 2, 2 ) ,
Z 22 ( 2,2 ) = P t ( 2,2 ) - A22 ( 2,2 ) ,
G1 ( 2, 2 ) = Z12 ( 2, 2 ) × Z 22-1 ( 2,2 ) ,
G 2 ( 2, 2 ) = Z 21 ( 2, 2 ) × Z11-1 ( 2,2 ) .
<1>
<2>
Переход от спектральных характеристик F ( 2,0 ) и F ( 2,0 ) к соответствующим
плотностям вероятности осуществляется по формуле обращения:
f < k > ( t , x ) = S -1 éëF < k > ( 2, 0 ) ùû =
¥
åF
i0 ,i1 = 0
<k >
i0i1
× Pi0 ( t ) × F i1 ( x ) ,
<k >
<k >
где F i0i1 – элементы спектральной характеристики F ( 2,0 ) , t Î T , x Î R , k = 1,2 .
<1>
<2>
На рис. 6–9 изображены графики функций f ( t , x ) , f ( t , x ) и их сечений при различных
значениях переменной времени t
(порядок усечения спектральных характеристик равен
шестнадцати), причем при расчете были выбраны следующие параметры системы стабилизации:
a = 0.7,
k = 1.4,
x0 = 2,
x = 0.5,
D 0 = 2,
D = 2.5,
c1 = 2,
c2 = 0.4 .
1
t, x
1
t, x
t 0.1
t0
t 0.25
t1
x
t
Рис. 6. Плотность вероятности состояния системы
стабилизации в режиме захвата.
2
Рис. 7. Плотность вероятности состояния системы
стабилизации в режиме захвата при различных
значениях переменной времени.
t, x
t0
2
t 0.1
t 0.25
t, x
t1
x
t
Рис. 8. Плотность вероятности состояния системы
стабилизации в режиме поиска.
Рис. 9. Плотность вероятности состояния системы
стабилизации в режиме поиска при различных значениях
переменной времени.
Перейдем к определению вероятностей работы структур и взвешенных моментных
характеристик. Воспользуемся формулой (25), тогда спектральные характеристики функций
P <1> ( t ) и P < 2 > ( t ) определяются соотношением
P < k > (1,0 ) = ( E (1,1) Ä J ( 0,1) ) × F < k > ( 2,0 ) ,
k = 1,2 ,
где J ( 0,1) – спектральная характеристика функционала J
(см. примеры 1 и 5), определенная
относительно системы функций Эрмита.
<1>
< 2>
Для перехода от спектральных характеристик P (1,0 ) и P (1,0 ) к соответствующим
функциям времени используется формула обращения (33):
¥
P < k > ( t ) = S -1 éë P < k > (1,0 ) ùû = å Pi0< k > × Pi0 ( t ) ,
i0 = 0
<k >
<k >
где Pi0 – элементы спектральной характеристики P (1,0 ) , t Î T , k = 1,2 .
На рис. 10 изображены графики вероятностей работы структур, полученных спектральным
методом (сплошная линия) и методом ортогонального разложения (пунктир) [20].
Спектральные
характеристики
взвешенных
математического
ожидания
и
дисперсии
состояния системы стабилизации определяются соотношениями (24) и (26), которые в данном
случае принимают вид:
M < k > (1,0 ) = ( E (1,1) Ä J ( 0,1) ) × ( E (1,1) Ä X (1,1) ) × F< k > ( 2,0 ) ,
D < k > (1,0 ) = ( E (1,1) Ä J ( 0,1) ) × ( E (1,1) Ä X 2 (1,1) ) × F < k > ( 2,0 ) - (V (1, 2 ) e P < k > (1,0 ) ) × (V (1,2 ) e M < k > (1,0 ) ) × M < k > (1,0 ) ,
-1
где V (1,2 ) – спектральная характеристика множительного звена, определенная относительно
системы полиномов Лежандра, k = 1,2 .
Рис. 10. Вероятности работы системы стабилизации
в режимах захвата и поиска.
<k >
<k >
Переход от спектральных характеристик M (1,0 ) и D (1,0 ) к соответствующим
функциям времени осуществляется по формулам обращения:
¥
m< k > ( t ) = S -1 éë M < k > (1,0 ) ùû = å M i<0 k > × Pi0 ( t ) ,
i0 = 0
¥
D < k > ( t ) = S -1 éë D < k > (1,0 ) ùû = å Di<0 k > × Pi0 ( t ) ,
i0 = 0
<k >
<k >
<k >
<k >
где M i0 и Di0 – элементы спектральных характеристик M (1,0 ) и D (1,0 ) соответственно,
k = 1,2 .
Математическое ожидание и дисперсия состояния системы стабилизации определяются
выражениями m ( t ) = m
<1>
(t ) + m
< 2>
2
é
m< k > ( t ) ) ù
(
<
k
>
ú - m2 (t ) .
(t ) и D (t ) = å ê D (t ) + < k >
P (t ) ú
k =1 ê
ë
û
2
Графики взвешенных моментных характеристик состояния системы стабилизации и графики
функций m ( t ) и D ( t ) показаны на рис. 11 и 12, причем сплошной линией изображены графики
функций, полученных спектральным методом, а пунктиром – графики функций, полученных
методом ортогонального разложения.
На рис. 10 и 11 видно, что графики функций, полученных спектральным методом и методом
ортогонального разложения, практически совпадают, а на рис. 12 заметны расхождения. Это
объясняется тем, что дисперсия не может быть представлена в виде значения линейного
функционала (см. (11), (20) и (23)), что приводит к необходимости использования свойства
спектрального преобразования произведения функций, или недостаточной точностью метода
ортогонального разложения. Тем не менее, точность вычислений может быть повышена
посредством увеличения порядка усечения спектральных характеристик.
m t
D t
m 1 t
m
2
D 2 t
t
D 1 t
Рис. 11. Математическое ожидание состояния
системы стабилизации.
Рис. 12. Дисперсия состояния
системы стабилизации.
<
Замечание. Все расчеты проводились с помощью специализированного программного
обеспечения спектрального метода анализа и синтеза систем управления Spectrum [21].
Приложение 1
Многомерные матрицы
Пусть m1 и m2 – заданные натуральные числа, M = m1 + m2 . Каждый из индексов i1 , i2 ,..., im1 ,
j1 , j2 ,..., jm2 пробегает бесконечный ряд целых неотрицательных чисел, т.е.
i1 = 0,1, 2,...,
i2 = 0,1, 2,..., ..., im1 = 0,1,2,...,
j1 = 0,1,2,...,
j2 = 0,1,2,..., ...,
jm2 = 0,1, 2,...
Упорядоченная совокупность в общем случае комплексных чисел Ai1i2 ...im1 j1 j2 ... jm2 называется
многомерной матрицей размерности M , имеющей m1 строчных и m2 столбцовых индексов, и
обозначается A ( m1 , m2 ) или
(A
i1i2 ...im1 j1 j2 ... jm2
).
Таким образом, первые m1 индексов являются
строчными, а остальные – столбцовыми. Числа Ai1i2 ...im1 j1 j2 ... jm2 называются элементами многомерной
матрицы.
Разделение множества индексов на строчные и столбцовые позволяет задать структуру
многомерной матрицы. Например, упорядоченную совокупность чисел X 0 , X 1 , X 2 ,... можно
éX0 ù
êX ú
1
интерпретировать как матрицу–столбец, тогда в принятых обозначениях X (1, 0 ) = ê ú . Эту же
êX2ú
ê ú
ë M û
совокупность
X ( 0,1) = [ X 0
чисел
X1
можно
рассматривать
как
матрицу–строку,
и
тогда
X2 L ].
Двумерная матрица A (1,1) представляется в виде прямоугольной таблицы чисел, т.е.
é A00
êA
A (1,1) = ê 10
ê A20
ê
ë M
A01
A11
A21
M
A02
A12
A22
M
Lù
Lúú
. Способ представления многомерных матриц в случае, когда
Lú
ú
Oû
количество строчных или столбцовых индексов больше единицы, изложен в [12].
Если элементы многомерной матрицы A ( m1 , m2 ) являются функциями времени, то эту
зависимость целесообразно указывать в обозначении матрицы, отделяя переменную t от
количества строчных и столбцовых индексов точкой с запятой, т.е. A ( m1 , m2 ; t ) .
Многомерная матрица A ( m1 , m2 ) , у которой количество строчных и столбцовых индексов
совпадает, т.е. m1 = m2 , называется гиперквадратной. Многомерная матрица A ( m1 , m2 ) называется
гиперстрочной, если все ее индексы являются столбцовыми, т.е. m1 = 0 , и гиперстолбцовой, если
все ее индексы строчные, т.е. m2 = 0 . Матрицу вида A ( 0,0 ) следует понимать как число.
Рассмотрим основные операции над многомерными матрицами.
1. Суммой
(разностью)
(
B ( m1 , m2 ) = Bi1i2 ...im
j j ... jm2
1 1 2
)
многомерных
называется
многомерная
(
j j ... jm2
1 1 2
(
j j ... jm2
1 1 2
A ( m1 , m2 ) = Ai1i2 ...im
матриц
C ( m1 , m2 ) = Ci1i2 ...im
матрица
)
и
),
т.е.
C ( m1 , m2 ) = A ( m1 , m2 ) + B ( m1 , m2 ) ( C ( m1 , m2 ) = A ( m1 , m2 ) - B ( m1 , m2 ) ) , если
Ci1i2 ...im
j j ... jm2
1 1 2
= Ai1i2 ...im
j j ... jm2
1 1 2
+ Bi1i2 ...im
j j ... jm2
1 1 2
(C
i1i2 ...im1 j1 j2 ... jm2
= Ai1i2 ...im
j j ... jm2
1 1 2
)
- Bi1i2 ...im
j j ... jm2
1 1 2
для всех i1 , i2 ,..., im1 = 0,1, 2,... , j1 , j2 ,..., jm2 = 0,1,2,...
(
2. Произведением многомерной матрицы A ( m1 , m2 ) = Ai1i2 ...im1 j1 j2 ... jm2
многомерная
Bi1i2 ...im
j j ... jm2
1 1 2
(
B ( m1 , m2 ) = Bi1i2 ...im
матрица
= a Ai1i2 ...im
j j ... jm2
1 1 2
многомерных
B ( m3 , m2 ) = Bk1k2 ...km
j j ... jm2
3 1 2
),
называется
B ( m1 , m2 ) = a A ( m1 , m2 ) ,
т.е.
если
для всех i1 , i2 ,..., im1 = 0,1,2,... , j1 , j2 ,..., jm2 = 0,1,2,...
3. Произведением
(
j j ... jm2
1 1 2
) на число a
)
(
A ( m1 , m3 ) = Ai1i2 ...im k1k2 ...km
матриц
называется многомерная матрица
C ( m1 , m2 ) = A ( m1 , m3 ) × B ( m3 , m2 ) , если Ci1i2 ...im1 j1 j2 ... jm2 =
¥
å
k1 , k 2 ,..., km3 = 0
1
3
(
)
и
C ( m1 , m2 ) = Ci1i2 ...im
j j ... jm2
1 1 2
Ai1i2 ...im k1k2 ...km × Bk1k2 ...km
1
т.е.
для всех
j j ... jm2
3 1 2
3
),
i1 , i2 ,..., im1 = 0,1,2,... , j1 , j2 ,..., jm2 = 0,1,2,...
(
4. Произведением многомерных матриц A ( m1 ,2m1 ) = Ai1i2 ...im1 j1 j2 ... jm1 k1k2 ...km1
(
) и B ( m ,0) = ( B
1
k1 k2 ... km1
)
)
называется многомерная матрица C ( m1 , m1 ) = Ci1i2 ...im1 j1 j2 ... jm1 , т.е. C ( m1 , m1 ) = A ( m1 ,2m1 ) e B ( m1 ,0 ) ,
Ci1i2 ...im
если
j j ... jm1
1 1 2
¥
å
=
k1 , k 2 ,..., km1 = 0
Ai1i2 ...im
j j ... jm1 k1 k2 ...km1
1 1 2
× Bk1k2 ...km
для
1
i1 , i2 ,..., im1 = 0,1,2,... ,
всех
j1 , j2 ,..., jm1 = 0,1, 2,...
5. Тензорным
(
произведением
B ( m3 , m4 ) = Bk1k2 ...km l1l2 ...lm
3
4
(
)
1
j j ... jm2 l1l2 ...l m4
3 1 2
1
j j ... jm2 l1l2 ...lm4
3 1 2
(
A ( m1 , m2 ) = Ai1i2 ...im
матриц
называется
C ( m1 + m3 , m2 + m4 ) = Ci1i2 ...im k1k2 ...km
Ci1i2 ...im k1k2 ...km
многомерных
j j ... jm2
1 1 2
многомерная
)
и
матрица
) , т.е. C ( m + m , m + m ) = A ( m , m ) Ä B ( m , m ) , если
1
3
2
4
1
2
3
4
= Ai1i2 ...im j1 j2 ... jm × Bk1k2 ...km l1l2 ...lm для всех i1 , i2 ,..., im1 = 0,1,2,... , k1 , k2 ,..., km3 = 0,1, 2,... ,
1
2
3
4
j1 , j2 ,..., jm2 = 0,1,2,... , l1 , l2 ,..., lm4 = 0,1, 2,...
6. Многомерная
(
B ( m2 , m1 ) = B j1 j2 ... jm i1i2 ...im
матрица
2
1
)
(
называется
транспонированной
)
по
отношению к многомерной матрице A ( m1 , m2 ) = Ai1i2 ...im1 j1 j2 ... jm2 , т.е. B ( m2 , m1 ) = éë A ( m1 , m2 ) ùû , если
T
B j1 j2 ... jm i1i2 ...im = Ai1i2 ...im j1 j2 ... jm для всех i1 , i2 ,..., im1 = 0,1, 2,... , j1 , j2 ,..., jm2 = 0,1,2,...
2
1
1
2
7. Гиперквадратная
матрица
A-1 ( m1 , m1 )
называется
обратной
по
отношению
к
гиперквадратной матрице A ( m1 , m1 ) , если справедливо равенство
A ( m1 , m1 ) × A-1 ( m1 , m1 ) = A-1 ( m1 , m1 ) × A ( m1 , m1 ) = E ( m1 , m1 ) ,
где гиперквадратная матрица E ( m1 , m1 ) называется единичной, т.е. для любой гиперквадратной
матрицы B ( m1 , m1 ) выполняется тождество
B ( m1 , m1 ) × E ( m1 , m1 ) = E ( m1 , m1 ) × B ( m1 , m1 ) = B ( m1 , m1 ) .
Свойства операций сложения, вычитания, умножения на число, умножения, тензорного
умножения, транспонирования и обращения многомерных матриц приведены в [11,12].
Приложение 2
Спектральные характеристики функций и линейных операторов
Пусть x принадлежит множеству W Í R n , а система функций
{ p ( i , i ,..., i , x )}
¥
1
2
n
i1 , i2 ,..., in = 0
образует базис пространства L2 ( W ) .
Гиперстолбцовая матрица
(
)
H ( n, 0 ) = H i1i2 ...in , элементы которой представляют собой
коэффициенты разложения функции h ( x ) Î L2 ( W ) в ряд по функциям базисной системы
{ p ( i , i ,..., i , x )}
¥
1
2
n
i1 , i2 ,..., in = 0
, т.е.
H i1i2 ...in = ( p ( i1 , i2 ,..., in , x ) , h ( x ) ) L
2
(W) ,
i1 , i2 ,..., in = 0,1,2,... ,
называется спектральной характеристикой функции h ( x ) .
Отображение, ставящее в соответствие функции h ( x ) ее спектральную характеристику
H ( n,0 ) , называется спектральным преобразованием функции h ( x ) и обозначается S :
S éë h ( x ) ùû = H ( n,0 ) .
Обратный переход от спектральной характеристики H ( n,0 ) к функции h ( x ) осуществляется
по формуле обращения:
h ( x ) = S -1 éë H ( n,0 ) ùû =
¥
å
i1 , i2 ,..., in = 0
H i1i2 ...in × p ( i1 , i2 ,..., in , x ) .
Замечание. Понятие спектральных характеристик может быть распространено на более
широкий класс функций, в том числе на обобщенные функции [4,5].
Перейдем к определению спектральных характеристик линейных операторов. Пусть A –
линейный
оператор,
(
)
определенный
на
пространстве
L2 ( W ) .
Гиперквадратная
матрица
A ( n, n ) = Ai1i2 ...in j1 j2 ... jn , элементы которой определяются формулой
Ai1i2 ...in j1 j2 ... jn = ( p ( i1 , i2 ,..., in , x ) , A p ( j1 , j2 ,..., jn , x ) ) L ( W) ,
i1 , i2 ,..., in = 0,1,2,... ,
2
j1 , j2 ,..., jn = 0,1, 2,... ,
называется спектральной характеристикой оператора A , а отображение, ставящее в соответствие
линейному оператору его спектральную характеристику, также называется спектральным
преобразованием и обозначается S :
S [ A ] = A ( n, n ) .
A
Теорема. Пусть
L2 ( W ) ,
– линейный оператор, определенный на пространстве
h ( x ) Î L2 ( W ) , A ( n, n ) и H ( n,0 ) – спектральные характеристики оператора A и функции h ( x )
соответственно, определенные относительно базисной системы { p ( i1 , i2 ,..., in , x )}i1 , i2 ,..., in = 0 . Тогда
¥
S éëA h ( x ) ùû = A ( n, n ) × H ( n,0 ) ,
т.е. спектральная характеристика образа функции h ( x ) равна произведению спектральной
характеристики оператора A и спектральной характеристики функции h ( x ) .
Доказательство.
Обозначим через
w ( x ) образ функции h ( x ) , т.е. w ( x ) = A h ( x ) .
Представим функцию h ( x ) в виде ряда по функциям базисной системы
{ p ( i , i ,..., i , x )}
¥
1
2
n
i1 , i2 ,..., in = 0
и
воспользуемся свойством линейности оператора A :
é ¥
ù
w ( x ) = A ê å H j1 j2 ... jn × p ( j1 , j2 ,..., jn , x ) ú =
ë j1 , j2 ,..., jn =0
û
¥
å
j1 , j2 ,..., jn = 0
H j1 j2 ... jn × A p ( j1 , j2 ,..., jn , x ) .
Найдем коэффициенты разложения функции
{ p ( i , i ,..., i , x )}
¥
1
2
n
i1 , i2 ,..., in = 0
:
w( x)
по функциям базисной системы
¥
æ
ö
Wi1i2 ...in = ( p ( i1 , i2 ,..., in , x ) , w ( x ) ) L ( W) = ç p ( i1 , i2 ,..., in , x ) , å H j1 j2 ... jn × A p ( j1 , j2 ,..., jn , x ) ÷
,
2
j1 , j2 ,..., jn = 0
è
ø L2 ( W)
i1 , i2 ,..., in = 0,1,2,...
Учитывая свойства скалярного произведения, получаем, что
Wi1i2 ...in =
Тогда
¥
å ( p ( i , i ,..., i , x ) , A p ( j , j ,..., j , x ) )
j1 , j2 ,..., jn = 0
по
1
2
n
определению
W ( n,0 ) = A ( n, n ) × H ( n,0 ) ,
1
2
n
произведения
где
W ( n,0 )
L2
× H j1 j2 ... jn =
( W)
многомерных
–
спектральная
¥
å
j1 , j2 ,..., jn = 0
Ai1i2 ...in j1 j2 ... jn × H j1 j2 ... jn .
матриц
справедливо
характеристика
равенство
функции
следовательно, S éëA h ( x ) ùû = A ( n, n ) × H ( n,0 ) .
Приведем
основные
свойства
спектрального
w( x) ,
<
преобразования
линейных
операторов,
определенных на пространстве L2 ( W ) .
1. Спектральная характеристика тождественного оператора I представляет собой 2n -мерную
единичную матрицу, т.е. S [ I ] = E ( n, n ) .
2. Спектральная характеристика композиции линейных операторов
A
и
B
равна
произведению их спектральных характеристик, т.е. S [ A o B ] = A ( n, n ) × B ( n, n ) , где A ( n, n ) = S [ A ] ,
B ( n, n ) = S [ B ] .
3. Предположим, что для линейного оператора A существует обратный оператор A -1 . Тогда
спектральная характеристика обратного оператора равна обратной спектральной характеристике
-1
-1
оператора A , т.е. S éëA ùû = A ( n, n ) , где A ( n, n ) = S [ A ] .
Замечание. Спектральные характеристики функций из пространств L2 (T ) и L2 (T ´ W ) , где
T Í [ 0, +¥ ) и W = R n , а также линейных операторов, заданных на этих пространствах,
определяются аналогично и обладают такими же свойствами.
Список литературы
1. Семенов В.В. Уравнение обобщенной характеристической функции вектора состояния систем
автоматического управления. // Аналитические методы синтеза регуляторов: Межвуз. науч. сб.
– Саратов: СПИ, 1977, вып. 2. – с. 3–36.
2. Сотскова И.Л. Применение аппарата обобщенной характеристической функции к анализу
стохастических систем управления ЛА. // Задачи стохастического управления: Тем. сб. науч.
тр. – М.: МАИ, 1986. – с. 71–78.
3. Semenov V.V., Sotskova I.L. The spectral method for solving Fokker-Planck-Kolmogorov equation
for stochastic control system analysis. // Proc. of 2nd IFAC symposium on stochastic control.
Preprints, part 1. – 1986. – p. 131–136.
4. Солодовников В.В., Семенов В.В. Спектральная теория нестационарных систем управления. –
М.: Наука, 1974. – 336 с.
5. Солодовников В.В., Семенов В.В., Пешель М., Недо Д. Расчет систем управления на ЦВМ:
спектральный и интерполяционный методы. – М.: Машиностроение, 1979. – 664 с.
6. Рыбаков К.А., Сотскова И.Л. Анализ систем с переменной структурой в классе обобщенных
характеристических функций. // Электронный журнал «Труды МАИ». – 2003, № 11. –
http://www.mai.ru (11.04.03).
7. Рыбаков К.А., Сотскова И.Л. Анализ непрерывно-дискретных систем в классе обобщенных
характеристических
функций.
// Теоретические
вопросы
вычислительной
техники
и
программного обеспечения: Межвуз. сб. науч. тр. – М.: МИРЭА, 2003. – с. 81–89.
8. Пантелеев А.В., Семенов В.В. Синтез оптимальных систем управления при неполной
информации. – М.: МАИ, 1992. – 192 с.
9. Рыбаков К.А., Сотскова И.Л. Синтез оптимальных систем с переменной структурой при
неполной
информации.
// Электронный
журнал
«Труды МАИ».
–
2003,
№ 13.
–
http://www.mai.ru (21.10.03).
10. Пугачев В.С. Лекции по функциональному анализу. – М.: МАИ, 1996. – 744 с.
11. Соколов Н.П. Введение в теорию многомерных матриц. – Киев: Наукова думка, 1972. – 175 с.
12. Гришин В.Н., Дятлов В.А., Милов Л.Т. Модели, алгоритмы и устройства идентификации
сложных систем. – Л.: Энергоатомиздат, 1985. – 104 с.
13. Рыбаков К.А., Сотскова И.Л. Алгоритмическое обеспечение спектрального метода анализа
систем
управления
в
неограниченных
областях
изменения
времени
и
фазовых
координат. // Электронный журнал «Труды МАИ». – 2004, № 16. – http://www.mai.ru (28.06.04).
14. Тихонов В.И., Миронов М.А. Марковские процессы. – М.: Советское радио, 1977. – 488 с.
15. Пугачев В.С., Синицын И.Н.
Стохастические
фильтрация. – М.: Наука, 1990. – 632 с.
дифференциальные
системы.
Анализ
и
16. Артемьев В.М. Теория динамических систем со случайными изменениями структуры. –
Минск: Вышэйшая школа, 1979. – 160 с.
17. Казаков И.Е., Артемьев В.М., Бухалев В.А.
Анализ
систем
случайной
структуры.
–
М.: Физматлит, 1993. – 272 с.
18. Федосов Е.А., Инсаров В.В., Селивохин О.С. Системы управления конечным положением в
условиях противодействия среды. – М.: Наука, 1989. – 272 с.
19. Красовский А.А. Статистическое исследование переходных процессов в нелинейных системах.
// Современные
методы
проектирования
систем
автоматического
управления.
–
М.: Машиностроение, 1967. – с. 520–544.
20. Казаков И.Е. Статистическая динамика систем с переменной структурой. - М.: Наука, 1977. –
416 с.
21. Рыбаков К.А. Программное обеспечение спектрального метода Spectrum. // Электронный
журнал «Труды МАИ». – 2003, № 14. – http://www.mai.ru (26.12.03).
Рыбаков Константин Александрович, аспирант кафедры математической кибернетики
Московского авиационного института (государственного технического университета);
e-mail: rkoffice@mail.ru, dep805@mai.ru.